Настоящее изобретение относится к самоподъемной системе для бетонной конструкции, содержащей подъемный рельс и подъемный механизм, перемещаемый в осевом направлении вдоль подъемного рельса.
Настоящее изобретение также относится к способу подъема подъемного механизма по подъемному рельсу, расположенному на бетонной конструкции.
Уровень техники
В автоматических самоподъемных системах механизм подъема может как подниматься по подъемному рельсу, так и подниматься по подъемному каркасу, который можно подсоединить к механизму подъема. С помощью переключаемого механизма подъема подъемные рельсы сначала поднимают в секцию свежего бетонирования, перемещают между стеной и опалубкой, а затем поднимают по несущей конструкции с помощью подъемного механизма.
При подъеме по подъемному рельсу приводной механизм подъемной головки находится под стопорным блоком подъемного рельса. При подъеме по несущей конструкции приводной механизм подъемной головки усаживается на стопорный блок подъемного рельса. При перемещении в конечное положение выступы в подъемных головках переключаются через пластины переключения на подъемном рельсе и захватывают с собой приводные механизмы, которые затем защелкиваются обратно на стопорных блоках подъемного рельса или под ними в зависимости от настройки.
Гидравлическая система имеет систему управления, с помощью которой цилиндры могут выдвигаться и втягиваться. Чтобы можно было забраться на несущую конструкцию, рельсы должны быть уже подняты и неподвижно закреплены.
Недостатком этого решения является то, что подъемный рельс должен иметь большое количество пластин переключения, чтобы запустить процессы переключения для позиционирования приводных механизмов соответствующих подъемных головок.
В публикации ЕР 0681635 В1 описано самоподъемное устройство для подъемного каркаса с по меньшей мере одним линейным приводом, которое создает относительное перемещение между по меньшей мере одним передвижным кронштейном и по меньшей мере одним опорным рельсом, проходящим в направлении перемещения, в частности, когда линейный привод попеременно перемещает секцию каркаса и, после крепления к стене и отсоединения крепления опорного рельса, на рабочую секцию.
Соединение между линейным приводом и опорным рельсом осуществляется с помощью разнесенных подъемных головок.
Во время относительного движения блокирующий элемент поднимается над блокирующим кулачком в одном направлении, а в другом направлении движения он наезжает на блокирующий кулачок, так что одна подъемная головка жестко связана с опорной рейкой, блокируя это относительное движение, в то время как относительное движение, преодолевающее блокирующий кулачок, происходит на другой подъемной головке.
Следовательно, существует необходимость в усовершенствовании существующих самоподъемных систем и способов подъема, чтобы обеспечить более простую схему переключения приводных механизмов в автоматических подъемных системах, которая также менее подвержена ошибкам.
Таким образом, целью изобретения является обеспечение самоподъемной системы и соответствующего способа, которые обеспечивают упрощенное, менее подверженное ошибкам переключение приводных механизмов в автоматических подъемных системах.
Описание изобретения
Задача согласно настоящему изобретению достигается с помощью самоподъемной системы для бетонной конструкции с подъемным рельсом и подъемным механизмом, который может перемещаться в осевом направлении вдоль подъемного рельса в соответствии с пунктом 1 формулы изобретения, и способа подъема подъемного механизма на подъемном рельсе, установленном на бетонной конструкции в соответствии с пунктом 13 формулы изобретения.
Изобретение относится к самоподъемной системе для бетонной конструкции с подъемным рельсом и подъемным механизмом, выполненным с возможностью осевого перемещения по подъемному рельсу, который имеет первую подъемную головку, вторую подъемную головку и линейный привод, соединяющий первую подъемную головку и вторую подъемную головку, причем каждая из первой подъемной головки и второй подъемной головки имеет приводной механизм, который можно регулировать между положением подъема и положением фиксации, в частности, подъемного механизма, причем приводной механизм первой подъемной головки и приводной механизм второй подъемной головки соединены с помощью тяги управления, и при этом тяга управления выполнена с возможностью приложения крутящего момента по меньшей мере к одному из приводных механизмов в заданных положениях линейного привода.
Изобретение также относится к способу подъема подъемного механизма по подъемному рельсу, расположенному на бетонной конструкции. Способ включает обеспечение первой подъемной головки, второй подъемной головки и линейного привода, соединяющего первую подъемную головку со второй подъемной головкой.
Способ также включает предоставление первой подъемной головки и второй подъемной головки, каждая из которых снабжена приводным механизмом, который можно регулировать между положением подъема и положением фиксации, в частности механизма подъема, причем приводной механизм первой подъемной головки и приводной механизм второй подъемной головки соединены с помощью тяги управления.
Способ также включает приложение крутящего момента по меньшей мере к одному из приводных механизмом в заданных положениях линейного привода с помощью тяги управления.
Одна из идей настоящего изобретения состоит в том, чтобы отказаться от пластин управления на подъемном рельсе за счет управления приводными механизмами с помощью тяги управления. Таким образом, возникает меньше повреждений, а срабатывание стопорного механизма происходит независимо от трения с меньшим количеством неисправностей. Кроме того, при таком типе срабатывания силы возврата в исходное положение ниже и нагрузка на подшипник кулисы меньше.
Кроме того, подъемные рельсы проще и дешевле в производстве, поскольку больше не требуются кулисы управления.
Кроме того, решение в соответствии с настоящим изобретением также может применяться в сочетании с существующими подъемными рельсами, с которыми совместим подъемный механизм в соответствии с настоящим изобретением. Таким образом, решение согласно настоящему изобретению предпочтительно приводит к значительно меньшему количеству признаков износа подъемного механизма и подъемного рельса.
Дополнительные варианты осуществления настоящего изобретения являются объектом дополнительных зависимых пунктов формулы изобретения и последующего описания со ссылками на графические материалы.
В соответствии с предпочтительным вариантом осуществления предусмотрено, что приводной механизм первой подъемной головки и приводной механизм второй подъемной головки при перемещении множества стопорных блоков, расположенных на подъемном рельсе, в результате осевого перемещения линейного привода перемещаются из положения фиксации, в котором приводной механизм находится по меньшей мере частично в плоскости стопорного блока, в положение подъема, в котором приводной механизм расположен вне плоскости стопорного блока. Таким образом, взаимодействие по меньшей мере одного приводного механизма со стопорным блоком, расположенным на подъемном рельсе, предпочтительно вызывает переключение соответствующего приводного механизма между положением подъема и положением фиксации.
В соответствии с еще одним предпочтительным вариантом осуществления предусмотрено, что тяга управления имеет наружную трубку и внутреннюю трубку или вал, которые могут входить и выходить из внешней трубки, при этом при перемещении линейного привода в первое осевое конечное положение, в частности в полностью выдвинутое положение, тяга управления выполнена с возможностью выработки импульса переключения для перемещения приводного механизма первой подъемной головки или второй подъемной головки, который находится в положении подъема, из положения подъема в положение фиксации.
Таким образом, тяга управления преимущественно позволяет устанавливать или позиционировать соответствующий приводной механизм в положение фиксации.
В соответствии с еще одним предпочтительным вариантом осуществления предусмотрено, что ход линейного привода по существу идентичен ходу тяги управления или отклоняется от него на величину до 15%, при этом, когда тяга управления достигает первого осевого конечного положения, подъемный механизм выполнен с возможностью перемещения приводного механизма первой подъемной головки или второй подъемной головки, который находится в положении подъема, из положения подъема в положение фиксации. Таким образом, тяга управления предпочтительно может перемещаться вместе с перемещением линейного привода, при этом тяга управления выполняет свое управляющее действие только в соответствующих конечных положениях хода линейного привода.
В соответствии с еще одним предпочтительным вариантом осуществления предусмотрено, что при перемещении линейного привода во второе осевое конечное положение, в частности в полностью втянутое положение, тяга управления выполнена с возможностью перемещения приводного механизма первой подъемной головки или второй подъемной головки, находящегося в положении для подъема, из положения подъема в положение фиксации.
Таким образом, тяга управления предпочтительно имеет соответствующий регулировочный эффект для перемещения соответствующей подъемной головки из положения подъема в положение фиксации как в первом осевом конечном положении, так и во втором осевом конечном положении управляющего цилиндра.
В соответствии с еще одним предпочтительным вариантом осуществления предусмотрено, что подъемный механизм выполнен с возможностью перемещения приводного механизма первой подъемной головки или второй подъемной головки, находящегося в положении подъема, из положения подъема в положение фиксации, когда тяга управления достигает второго осевого конечного положения. Таким образом, тяга управления предпочтительно может перемещаться вместе с перемещением линейного привода, при этом тяга управления выполняет свое управляющее действие только в соответствующих конечных положениях хода линейного привода.
В соответствии с еще одним предпочтительным вариантом осуществления предусмотрено, что приводной механизм первой подъемной головки и приводной механизм второй подъемной головки расположены на оси вращения соответствующей подъемной головки, при этом тяга управления на соответствующем приводном механизме расположена эксцентрично к оси вращения. Благодаря эксцентричному расположению или соединению тяги управления с соответствующим приводным механизмом тяга управления может, таким образом, преимущественно управлять приводным механизмом.
В соответствии с другим предпочтительным вариантом осуществления предусмотрено, что подъемный механизм выполнен таким образом, что, когда подъемный механизм приводится в действие в положении подъема, т.е. в положении подъема по рельсу или кронштейну, приводной механизм первой подъемной головки или второй подъемной головки опирается на стопорный блок, расположенный на подъемном рельсе, и при этом другой приводной механизм может приводиться в действие с помощью тяги управления. Таким образом, при подъеме вверх один из приводных механизмов может приводиться в действие с помощью тяги управления предпочтительным образом.
Согласно еще одному предпочтительному варианту осуществления наружная трубка и внутренняя трубка или вал тяги управления имеют на одном конце хода пружинный элемент, в частности, спиральную пружину, которая инициирует приведение в действие приводного механизма первой подъемной головки и/или второй подъемной головки. Длина пружинных элементов предпочтительно регулируется таким образом, чтобы допуски не повреждали тягу управления и можно было переключать точки переключения с режима подъема рельса на режим подъема кронштейна.
В соответствии с еще одним предпочтительным вариантом осуществления предусмотрено, что внутренняя трубка, в частности, в конце хода, имеет наружную резьбу, по меньшей мере, на участках, на конце которой расположена гайка, образующая упор, который ударяет по контрупору, в частности, уменьшение диаметра, наружной трубки.
Таким образом, предпочтительно можно предусмотреть концевой упор регулирующей трубки, который можно регулировать с помощью гайки.
В соответствии с еще одним предпочтительным вариантом осуществления предусмотрено, что тяга управления снабжена рукояткой, которая при приведении в действие, в частности, пользователем, выполнена с возможностью перемещения приводного механизма первой подъемной головки или второй подъемной головки между положением подъема и положением фиксации. Таким образом, подъемный механизм выполнен преимущественно с возможностью переключения из режима подъема по рельсам в режим подъема по консоли пользователем в любое время, если это необходимо.
В соответствии с еще одним предпочтительным вариантом осуществления предусмотрено, что линейный привод образован исполнительным цилиндром, который имеет шток поршня, который может регулироваться в осевом направлении в цилиндре, причем шток поршня соединен с первой подъемной головкой на осевом концевом участке, а цилиндр соединен на осевом концевом участке со второй подъемной головкой. Таким образом, первую подъемную головку можно перемещать в осевом направлении, а вторую подъемную головку можно фиксировать в осевом направлении.
В соответствии с еще одним предпочтительным вариантом осуществления предусмотрено, что приводной механизм первой подъемной головки и приводной механизм второй подъемной головки имеют по существу звездообразную форму, при этом приводной механизм имеет радиально ориентированную первую боковую сторону, радиально ориентированную вторую боковую сторону и радиально ориентированную третью боковую сторону.
В соответствии с еще одним предпочтительным вариантом осуществления предусмотрено, что тяга управления соединена с первой боковой стороной приводного механизма первой подъемной головки и приводным механизмом второй подъемной головки, а вторая боковая сторона приводных механизмов выполнена с возможностью опоры на стопорный блок, когда подъемный механизм находится в положении фиксации.
В соответствии с дополнительным предпочтительным вариантом осуществления предусмотрено, что приводной механизм первой подъемной головки и приводной механизм второй подъемной головки при перемещении множества стопорных блоков, расположенных на подъемном рельсе, в результате осевого перемещения линейного привода перемещаются из положения фиксации, в котором приводной механизм находится по меньшей мере частично в плоскости стопорного блока, в положение подъема, в котором приводной механизм расположен вне плоскости стопорного блока. Таким образом, взаимодействие по меньшей мере одного приводного механизма со стопорным блоком, расположенным на подъемном рельсе, предпочтительно вызывает переключение соответствующего приводного механизма между положением подъема и положением фиксации.
В соответствии с еще одним предпочтительным вариантом осуществления предусмотрено, что при перемещении линейного привода в первое осевое конечное положение, в частности в полностью втянутое или вытянутое положение, тяга управления генерирует импульс переключения для перемещения приводного механизма первой подъемной головки или второй подъемной головки, находящегося в положении для подъема, из положения подъема в положение фиксации. Таким образом, тяга управления преимущественно позволяет устанавливать или позиционировать соответствующий приводной механизм в положение фиксации.
Описанные варианты осуществления и дополнительные варианты осуществления можно комбинировать друг с другом по желанию.
Дальнейшие возможные варианты осуществления, дальнейшие разработки и реализации изобретения также включают комбинации признаков изобретения, описанных выше или ниже в отношении вариантов осуществления, которые не упомянуты в явном виде.
Краткое описание графических материалов
Прилагаемые графические материалы предоставлены для обеспечения дальнейшего понимания вариантов осуществления изобретения. Они иллюстрируют варианты осуществления и вместе с описанием служат для объяснения принципов и идей настоящего изобретения.
Другие варианты осуществления и многие из вышеупомянутых преимуществ станут очевидными при обращении к графическим материалам. Проиллюстрированные элементы графических материалов не обязательно показаны в масштабе по отношению друг к другу.
На графических материалах показано следующее.
На фиг. 1-9 показано схематическое изображение самоподъемной системы для бетонной конструкции в соответствии с предпочтительным вариантом осуществления изобретения.
На фиг. 10 показана блок-схема способа подъема подъемного механизма в соответствии с предпочтительным вариантом осуществления изобретения.
На фигурах графических материалов одинаковые ссылочные позиции обозначают идентичные или функционально идентичные элементы, части или компоненты, если не указано иное.
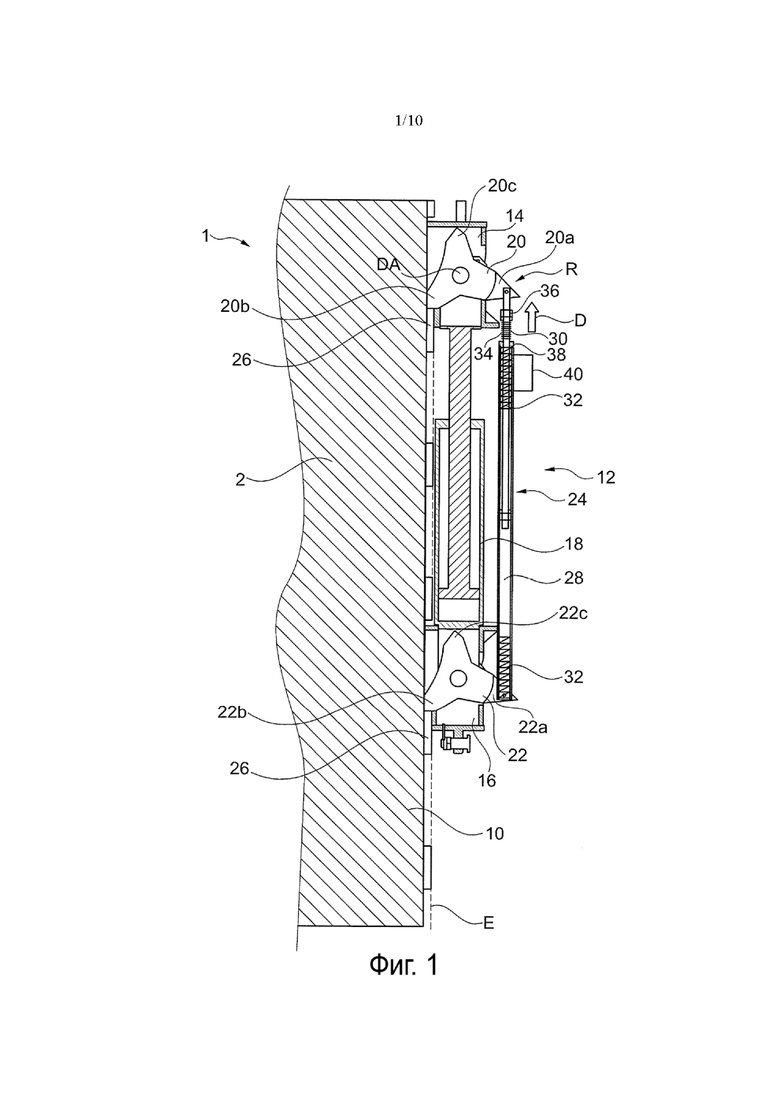
На фиг. 1 показано схематическое изображение самоподъемной системы для бетонной конструкции в соответствии с предпочтительным вариантом осуществления изобретения.
Самоподъемная система 1 имеет подъемный рельс 10 и подъемный механизм 12, который может перемещаться в осевом направлении вдоль подъемного рельса. Подъемный механизм 12 имеет первую подъемную головку 14, вторую подъемную головку 16 и линейный привод 18, соединяющий первую подъемную головку 14 со второй подъемной головкой 16.
Каждая из первой подъемной головки 14 и второй подъемной головки 16 имеет приводной механизм 20, 22, который можно регулировать между положением подъема K и положением фиксации R, в частности, подъемного механизма 12. Приводной механизм 20 первой подъемной головки 14 и приводной механизм 22 второй подъемной головки 16 соединены с помощью тяги 24 управления.
Тяга 24 управления выполнена с возможностью приложения крутящего момента D к одному из приводных механизмов 20, 22 в заданных положениях линейного привода 18 для поворота соответствующего приводного механизма 20, 22.
Приводные механизмы 20, 22 имеют по существу форму звезды на виде сбоку, при этом приводной механизм 20 первой подъемной головки 14 и приводной механизм 22 второй подъемной головки 16 расположены или соединены с соответствующей подъемной головкой 14, 16 на их оси вращения DA. Тяга 24 управления расположена на соответствующем приводном механизме 20, 22 эксцентрично к оси вращения.
Приводные механизмы 20, 22, которые в настоящем варианте осуществления имеют по существу звездообразную форму, расположены с тягой 24 управления на концевом участке сужающегося выступа или плеча соответствующего приводного механизма.
В качестве альтернативы приводные механизмы 20, 22 могут иметь другую подходящую форму. Примерами подходящих форм являются круглые, полые круглые, треугольные или прямоугольные.
Тяга 24 управления состоит из двух частей и имеет наружную трубку 28 и внутреннюю трубку 30, которая может входить в наружную трубку 28 и выходить из нее. Внутренняя трубка 30 может свободно перемещаться внутри наружной трубки 28 в пределах заданного хода. В качестве альтернативы, например, вместо внутренней трубки 30 может быть предусмотрен вал.
Наружная трубка 28 и внутренняя трубка 30 или, альтернативно, вал тяги 24 управления также имеют пружинный элемент 32, в частности, спиральную пружину, на одном конце хода. Пружинный элемент 32 инициирует приведение в действие приводного механизма 20, 22 первой подъемной головки 14 и/или второй подъемной головки 16.
Кроме того, внутренняя трубка 30, в частности, в конце хода по меньшей мере на участках имеет наружную резьбу 34, на конце которой расположена гайка 36.
Гайка 36 образует упор, который ударяет по контрупору 38, в частности, по уменьшению диаметра наружной трубки 28.
На данном изображении как приводной механизм 20 первой подъемной головки 14, так и приводной механизм 22 второй подъемной головки 16 поддерживаются стопорным блоком 26.
Приводной механизм 20 первой подъемной головки 14 и приводной механизм 22 второй подъемной головки 16 имеют по существу звездообразную форму, при этом приводной механизм 20, 22 имеет радиально ориентированную первую боковую сторону 20а, 22а, радиально ориентированную вторую боковую сторону 20b, 22b и радиально ориентированную третью боковую сторону 20c, 22c.
Тяга 24 управления соединена с первыми боковыми сторонами 20а, 22а приводного механизма 20 первой подъемной головки 14 и приводного механизма 22 второй подъемной головки 16. Вторая боковая сторона 20b, 22b приводных механизмов 20, 22 выполнена с возможностью опирания на стопорный блок 26 в положении фиксации R подъемного механизма 12.
На фиг. 2 показано схематическое изображение самоподъемной системы для бетонной конструкции в соответствии с предпочтительным вариантом осуществления изобретения. На данном изображении линейный привод 18 выдвинут несколько дальше, чем на фиг. 1, таким образом, что приводной механизм 20 первой подъемной головки 14 поднимается со стопорного блока 26, но все еще находится в положении фиксации R. Приводной механизм 22 второй подъемной головки 16 по-прежнему опирается на стопорный блок 26 из множества стопорных блоков.
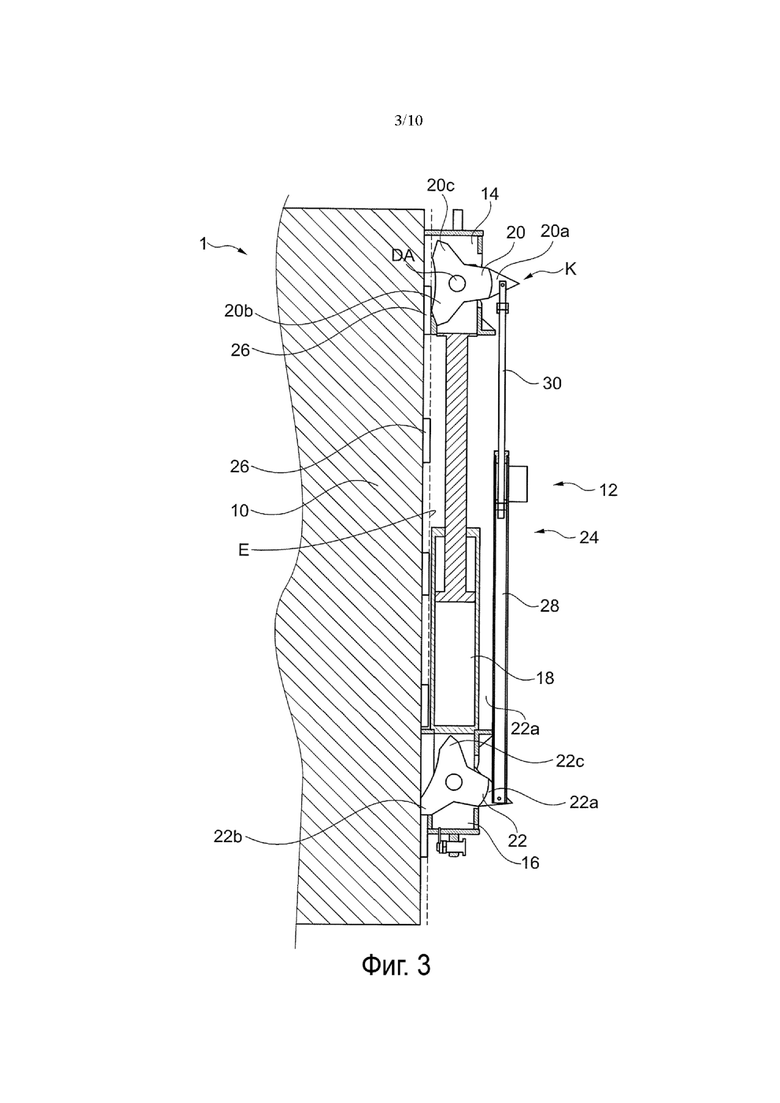
На фиг. 3 показано схематическое изображение самоподъемной системы для бетонной конструкции в соответствии с предпочтительным вариантом осуществления изобретения.
На данном изображении линейный привод 18 выдвинут немного дальше, чем на фиг. 2. При контакте плеча звездообразного приводного механизма 20 первой подъемной головки 14 со стопорным блоком 26 приводной механизм 20 перемещался из положения фиксации R в положение подъема K.
Приводной механизм 20 первой подъемной головки 4 вращается вокруг своей оси вращения DA, на которой установлен приводной механизм 20 первой подъемной головки 14.
Таким образом, приводной механизм 20 первой подъемной головки 14 больше не находится в плоскости Е стопорного блока 26, а находится вне плоскости Е стопорного блока 26.
На фиг. 4 показано схематическое изображение самоподъемной системы для бетонной конструкции в соответствии с предпочтительным вариантом осуществления изобретения. На изображении, показанном на фиг. 4, линейный привод 18 находится в своем первом осевом конечном положении 18а, т.е. в полностью выдвинутом положении.
Ход Н1 линейного привода 18 по существу идентичен ходу Н2 тяги 24 управления.
Альтернативно, ход Н1 линейного привода 18 может иметь отклонение, например, до 15% от хода Н2 тяги 24 управления.
Когда тяга 24 управления достигает первого осевого конечного положения 24а, подъемный механизм 12 выполнен с возможностью перемещения приводного механизма 20 первой подъемной головки, который расположен в положении подъема, из положения подъема в положение фиксации R.
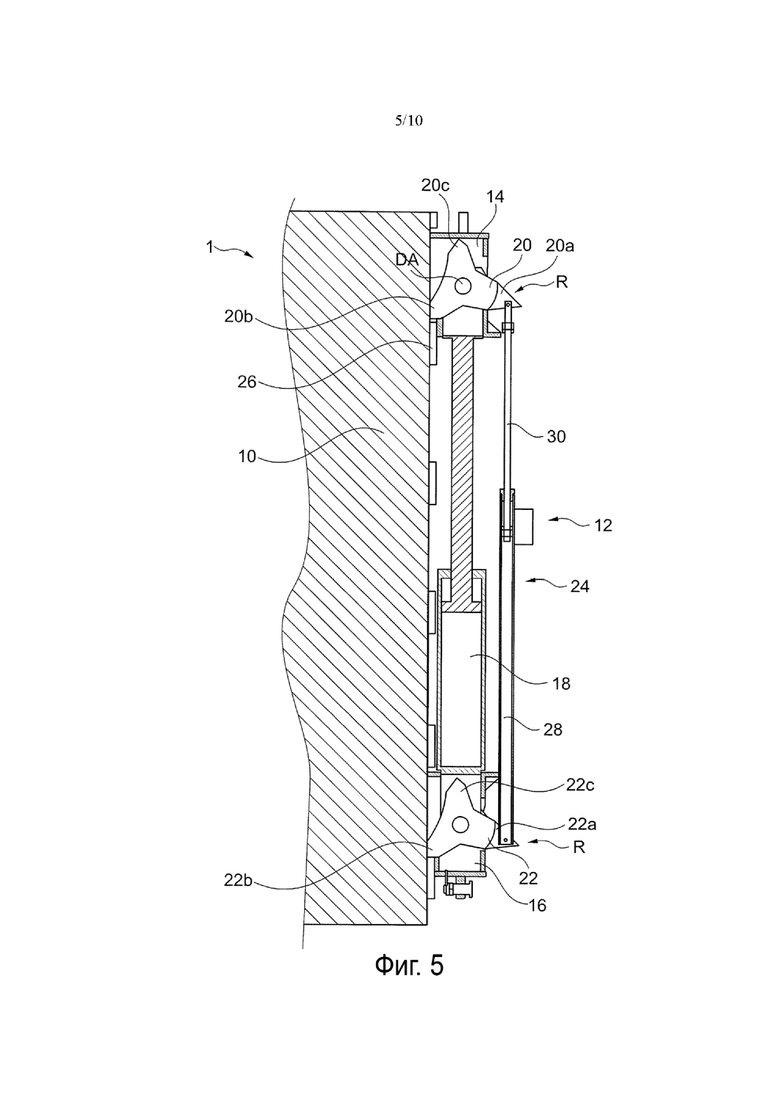
На фиг. 5 показано схематическое изображение самоподъемной системы для бетонной конструкции в соответствии с предпочтительным вариантом осуществления изобретения. На изображении, показанном на фиг. 5, линейный привод 18 несколько втянут по сравнению с изображением, показанным на фиг. 4, так что приводной механизм 20 первой подъемной головки 14 теперь опирается на стопорный блок 26.
На фиг. 6 показано схематическое изображение самоподъемной системы для бетонной конструкции в соответствии с предпочтительным вариантом осуществления изобретения. На изображении, показанном на фиг. 6, линейный привод 18 несколько втянут по сравнению с изображением, показанным на фиг. 5. Благодаря тому, что приводной механизм 20 первой подъемной головки 14 опирается на стопорный блок 26, приводной механизм 22 второй подъемной головки 16, таким образом, перемещается вверх и все еще находится в положении фиксации на показанном изображении.
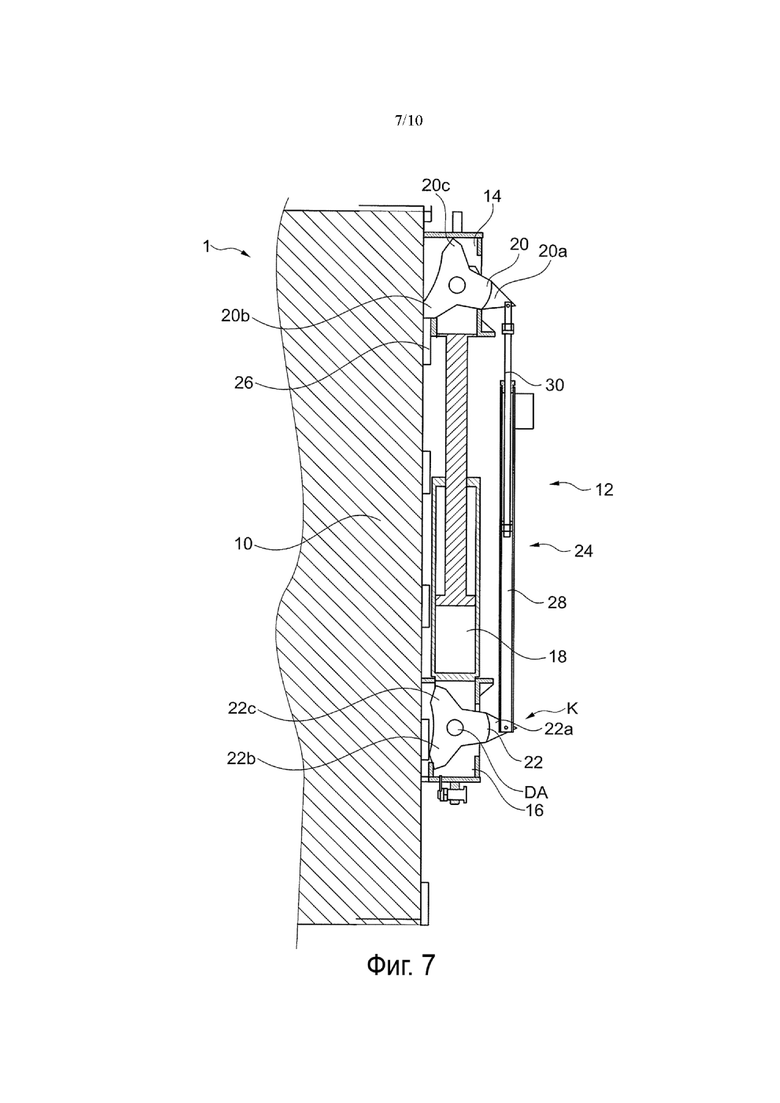
На фиг. 7 показано схематическое изображение самоподъемной системы для бетонной конструкции в соответствии с предпочтительным вариантом осуществления изобретения. На представленном изображении линейный привод 18 несколько втянут по сравнению с изображением, показанным на фиг. 7. Приводной механизм 22 второй подъемной головки 16, таким образом, перемещается из положения фиксации R в положение подъема K за счет того, что приводной механизм 22 второй подъемной головки 16 перемещается по стопорному блоку 26.
На фиг. 8 показано схематическое изображение самоподъемной системы для бетонной конструкции в соответствии с предпочтительным вариантом осуществления изобретения. На показанном изображении линейный привод 18 расположен во втором осевом конечном положении 18b, в частности, в полностью втянутом положении.
Благодаря смещенной в осевом направлении тяге 24 управления по сравнению с линейным приводом 18 приводной механизм 22 второй подъемной головки 16, таким образом, перемещается из положения подъема в положение фиксации R.
Кроме того, гайка 36, расположенная на внутренней трубке 30 и образующая упор, опирается на контрупор 38 наружной трубки 28.
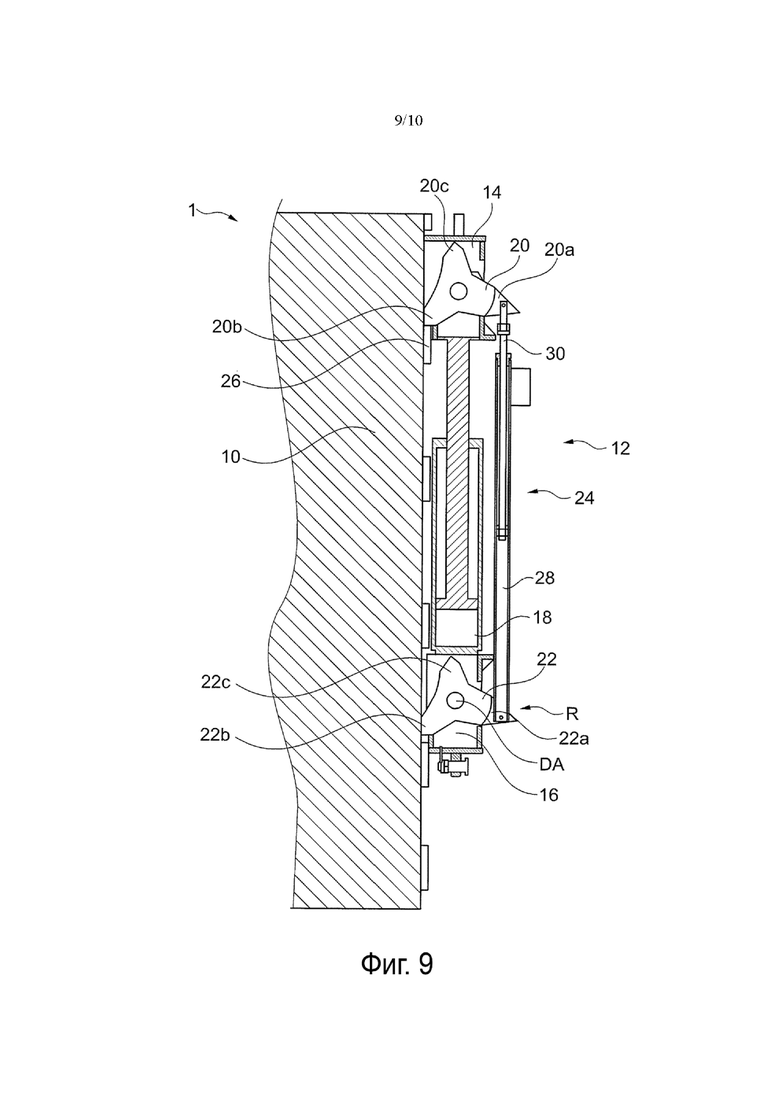
На фиг. 9 показано схематическое изображение самоподъемной системы для бетонной конструкции в соответствии с предпочтительным вариантом осуществления изобретения. На представленном изображении линейный привод 18 выдвинут несколько дальше по сравнению с изображением, показанным на фиг. 8. В результате приводной механизм 22 второй подъемной головки 16 упирается в стопорный блок 26 в положении фиксации R.
Таким образом, последовательность движений самоподъемной системы 1, показанная на фиг. 1-9, преимущественно позволяет подниматься как по подъемному рельсу, так и по кронштейну (не показан на фигурах).
В случае подъема по кронштейну отличие заключается в том, что приводной механизм уже не упирается в стопорный блок 26, а находится под ним. Если вы зеркально отразите изображения, можно показать подъем по рельсам.
На фиг. 10 показана блок-схема способа подъема подъемного механизма в соответствии с предпочтительным вариантом осуществления изобретения.
Способ подъема подъемного механизма 12 по подъемному рельсу, установленному на бетонной конструкции 2, включает обеспечение S1 первой подъемной головки 14, второй подъемной головки 16 и линейного привода 18, соединяющего первую подъемную головку 14 со второй подъемной головкой 16.
Способ дополнительно включает предоставление S2 первой подъемной головки 14 и второй подъемной головки 16, каждая из которых снабжена приводным механизмом 20, 22, который можно регулировать между положением подъема K и положением фиксации R, в частности подъемного механизма 12, причем приводной механизм 20 первой подъемной головки 14 и приводной механизм 22 второй подъемной головки 16 соединены с помощью тяги 24 управления.
Кроме того, способ также включает приложение S3 крутящего момента D по меньшей мере к одному из приводных механизмов 20, 22 в заданных положениях 18a, 18b линейного привода 18 с помощью тяги 24 управления.
Хотя в данном документе были проиллюстрированы и описаны конкретные варианты осуществления, специалистам в данной области техники будет понятно, что существует множество альтернативных и/или эквивалентных вариантов осуществления. Следует отметить, что иллюстративный вариант осуществления или иллюстративные варианты осуществления являются только примерами и никоим образом не предназначены для ограничения объема, применимости или конфигурации.
Скорее, приведенное выше краткое изложение и подробное описание предоставляют специалистам в данной области техники удобное руководство для реализации по меньшей мере одного иллюстративного варианта осуществления, при этом понимая, что могут быть сделаны различные изменения в функциональности и расположении элементов, не выходя за рамки прилагаемой формулы изобретения и ее юридических эквивалентов.
В общем, эта заявка предназначена для охвата модификаций, адаптаций или вариаций вариантов осуществления, изложенных в данном документе.
Список условных обозначений
1 Самоподъемная система
2 Бетонная конструкция
10 Подъемный рельс
12 Подъемный механизм
14 Первая подъемная головка
16 Вторая подъемная головка
18 Линейный привод
18a Первое осевое конечное положение
18b Второе осевое конечное положение
20, 22 Приводные механизмы
20a, 22a Первая боковая сторона
20b, 22b Вторая боковая сторона
20c, 22c Третья боковая сторона
24 Тяга управления
24a Первое осевое конечное положение
24b Второе осевое конечное положение
26 Стопорный блок
28 Наружная трубка
30 Внутренняя трубка
32 Пружинный элемент
34 Наружная резьба
36 Гайка
38 Контрупор
40 Рукоятка
D Крутящий момент
DA Поворотная ось
E Плоскость
H1, H2 Ход
K Положение подъема
R Положение фиксации
S1-S3 Этапы способа




Изобретение относится к самоподъемной системе (1) для бетонной конструкции (2) с подъемным рельсом (10) и подъемным механизмом (12), выполненным с возможностью осевого перемещения по подъемному рельсу (10), который имеет первую подъемную головку (14), вторую подъемную головку (16) и линейный привод (18), соединяющий первую подъемную головку (14) и вторую подъемную головку (16). Тяга (24) управления выполнена с возможностью перемещения в заданные положения (18а, 18b) линейного привода (18) по меньшей мере одного приводного механизма (20, 22) с крутящим моментом (D). Технический результат – упрощение переключения приводных механизмов в подъемной системе. 2 н. и 15 з.п. ф-лы, 10 ил.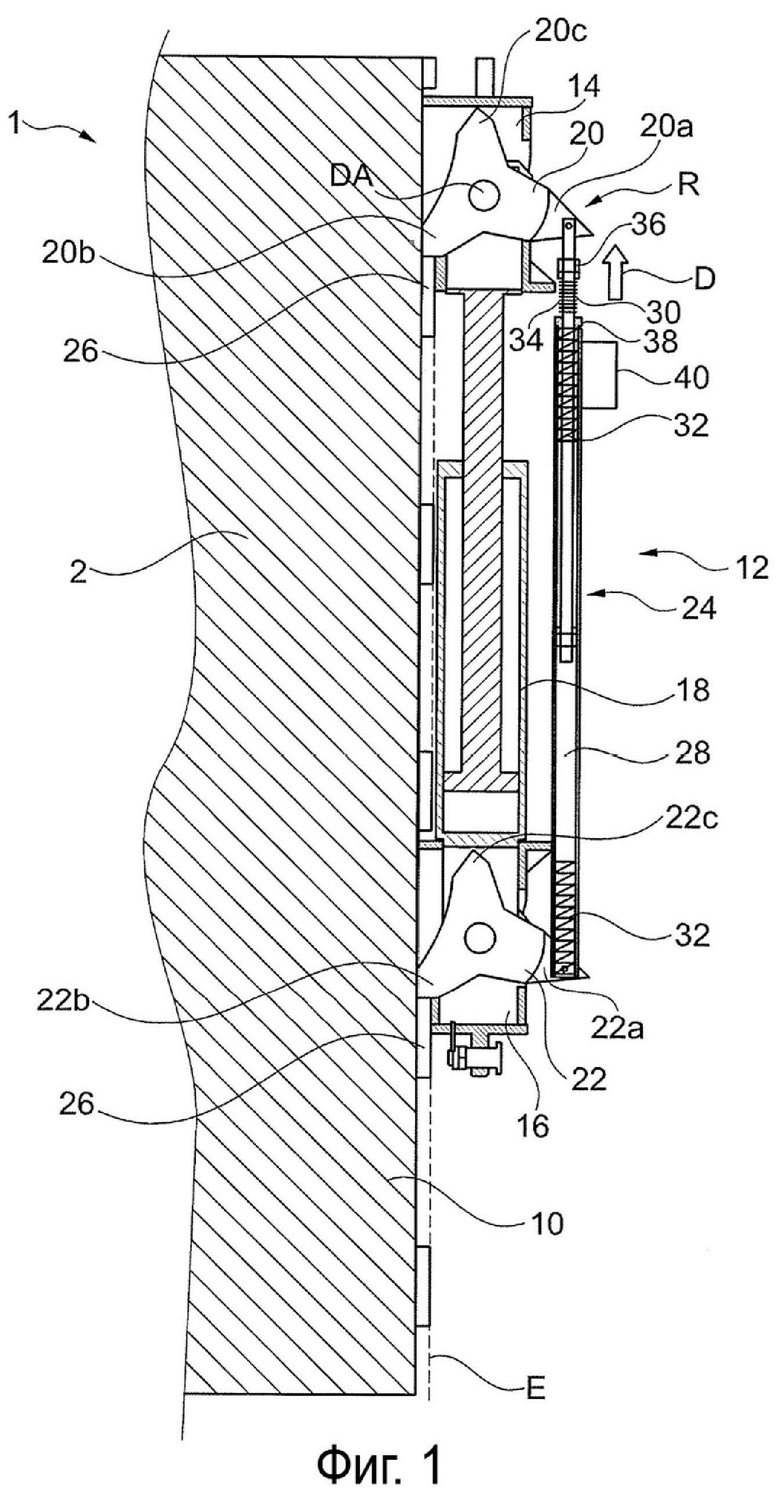
1. Самоподъемная система (1) для бетонной конструкции (2) с подъемным рельсом (10) и подъемным механизмом (12), выполненным с возможностью осевого перемещения по подъемному рельсу (10), который имеет первую подъемную головку (14), вторую подъемную головку (16) и линейный привод (18), соединяющий первую подъемную головку (14) и вторую подъемную головку (16), причем каждая из первой подъемной головки (14) и второй подъемной головки (16) имеет приводной механизм (20, 22), который выполнен с возможностью регулирования между положением подъема (K) и положением фиксации (R), причем приводной механизм (20) первой подъемной головки (14) и приводной механизм (22) второй подъемной головки (16) соединены с помощью тяги (24) управления, и при этом тяга (24) управления выполнена с возможностью приложения крутящего момента (D) по меньшей мере к одному из приводных механизмов (20, 22) в заданных положениях (18a, 18b) линейного привода (18).
2. Самоподъемная система по п. 1, отличающаяся тем, что приводной механизм (20) первой подъемной головки (14) и приводной механизм (22) второй подъемной головки (16) при перемещении стопорного блока (26) в результате осевого перемещения линейного привода (18) множества стопорных блоков (26), расположенных на подъемном рельсе (10), выполнены с возможностью перемещения из положения фиксации (R), в котором приводной механизм (20, 22) находится по меньшей мере частично в плоскости (E) стопорного блока (26), в положение подъема (K), в котором приводной механизм (20, 22) расположен вне плоскости (E) стопорного блока (26).
3. Самоподъемная система по п. 1 или 2, отличающаяся тем, что тяга (24) управления имеет наружную трубку (28) и внутреннюю трубку (30) или вал, которые выполнены с возможностью входа и выхода из наружной трубки (28), при этом при перемещении линейного привода (18) в первое осевое конечное положение (18a) тяга (24) управления выполнена с возможностью выработки импульса переключения для перемещения приводного механизма (20) первой подъемной головки (14) или второй подъемной головки (16), который находится в положении подъема (K), из положения подъема (K) в положение фиксации (R).
4. Самоподъемная система по п. 3, отличающаяся тем, что ход (H1) линейного привода (18) идентичен ходу (H2) тяги (24) управления или отклоняется от него на величину до 15%, при этом, когда тяга (24) управления достигает первого осевого конечного положения (24a), подъемный механизм (12) выполнен с возможностью перемещения приводного механизма (20) первой подъемной головки (14) или второй подъемной головки (16), который находится в положении подъема (K), из положения подъема (K) в положение фиксации (R).
5. Самоподъемная система по любому из предыдущих пунктов, отличающаяся тем, что при перемещении линейного привода (18) во второе осевое конечное положение (18b) тяга (24) управления выполнена с возможностью перемещения приводного механизма (20) первой подъемной головки (14) или второй подъемной головки (16), находящегося в положении подъема (K), из положения подъема (K) в положение фиксации (R).
6. Самоподъемная система по п. 4, отличающаяся тем, что подъемный механизм (12) выполнен с возможностью перемещения приводного механизма (20) первой подъемной головки (14) или второй подъемной головки (16), находящегося в положении подъема (K), из положения подъема (K) в положение фиксации (R), когда тяга (24) управления достигает второго осевого конечного положения (24b).
7. Самоподъемная система по любому из предыдущих пунктов, отличающаяся тем, что приводной механизм (20) первой подъемной головки (14) и приводной механизм (22) второй подъемной головки (16) расположены на оси вращения (DA) соответствующей подъемной головки (14, 16), при этом тяга (24) управления на соответствующем приводном механизме (20, 22) расположена эксцентрично к оси вращения.
8. Самоподъемная система по любому из предыдущих пунктов, отличающаяся тем, что подъемный механизм (12) выполнен таким образом, что, когда подъемный механизм (12) находится в положении фиксации (R), приводной механизм (20, 22) первой подъемной головки (14) или второй подъемной головки (16) выполнен с возможностью крепления на стопорном блоке (26), расположенном на подъемном рельсе (10), и при этом другой приводной механизм (20, 22) выполнен с возможностью приведения в действие с помощью тяги (24) управления.
9. Самоподъемная система по любому из пп. 3-8, отличающаяся тем, что наружная трубка (28) и внутренняя трубка (30) или вал тяги (24) управления имеют на одном конце хода пружинный элемент (32), который инициирует приведение в действие приводного механизма (20, 22) первой подъемной головки (14) и/или второй подъемной головки (16).
10. Самоподъемная система по п. 9, отличающаяся тем, что внутренняя трубка (30) имеет наружную резьбу (34), по меньшей мере, на участках, на конце которой расположена гайка (36), причем гайка (36) образует упор, который выполнен с возможностью удара по контрупору (38) наружной трубки (28).
11. Самоподъемная система по любому из предыдущих пунктов, отличающаяся тем, что тяга (24) управления снабжена рукояткой (40), которая при приведении в действие выполнена с возможностью перемещения приводного механизма (20, 22) первой подъемной головки (14) или второй подъемной головки (16) между положением подъема (K) и положением фиксации (R).
12. Самоподъемная система по любому из предыдущих пунктов, отличающаяся тем, что линейный привод образован исполнительным цилиндром, который имеет шток поршня, который выполнен с возможностью регулирования в осевом направлении в цилиндре, причем шток поршня соединен с первой подъемной головкой (14) на осевом концевом участке, а цилиндр соединен на осевом концевом участке со второй подъемной головкой (16).
13. Самоподъемная система по любому из предыдущих пунктов, отличающаяся тем, что приводной механизм (20) первой подъемной головки (14) и приводной механизм (22) второй подъемной головки (16) имеют звездообразную форму, при этом приводной механизм (20, 22) имеет радиально ориентированную первую боковую сторону (20а, 22а), радиально ориентированную вторую боковую сторону (20b, 22b) и радиально ориентированную третью боковую сторону (20c, 22c).
14. Самоподъемная система по п. 13, отличающаяся тем, что тяга (24) управления соединена с первой боковой стороной (20a, 22a) приводного механизма (20) первой подъемной головки (14) и приводным механизмом (22) второй подъемной головки (16), а вторая боковая сторона (20b, 22b) приводных механизмов (20, 22) выполнена с возможностью опоры на стопорный блок (26), когда подъемный механизм (12) находится в положении фиксации (R).
15. Способ подъема подъемного механизма (12) по подъемному рельсу (10), расположенному на бетонной конструкции (2), включающий следующие этапы:
предоставление (S1) первой подъемной головки (14), второй подъемной головки (16) и линейного привода (18), соединяющего первую подъемную головку (14) со второй подъемной головкой (16);
предоставление (S2) первой подъемной головки (14) и второй подъемной головки (16), каждая из которых снабжена приводным механизмом (20, 22), который выполнен с возможностью регулирования между положением подъема (K) и положением фиксации (R), причем приводной механизм (20) первой подъемной головки (14) и приводной механизм (22) второй подъемной головки (16) соединены с помощью тяги (24) управления; и
приложение (S3) крутящего момента (D) по меньшей мере к одному из приводных механизмов (20, 22) в заданных положениях (18a, 18b) линейного привода (18) с помощью тяги (24) управления.
16. Способ по п. 15, отличающийся тем, что приводной механизм (20) первой подъемной головки (14) и приводной механизм (22) второй подъемной головки (16) при перемещении стопорного блока (26) в результате осевого перемещения линейного привода (18) множества стопорных блоков (26), расположенных на подъемном рельсе (10), перемещаются из положения фиксации (R), в котором приводной механизм (20, 22) находится по меньшей мере частично в плоскости (E) стопорного блока (26), в положение подъема (K), в котором приводной механизм (20, 22) расположен вне плоскости (E) стопорного блока (26).
17. Способ по п. 15 или 16, отличающийся тем, что при перемещении линейного привода (18) в первое осевое конечное положение (18a) тяга (24) управления генерирует импульс переключения для перемещения приводного механизма (20) первой подъемной головки (14) или второй подъемной головки (16), находящегося в положении подъема (K), из положения подъема (K) в положение фиксации (R).
| US 5630482 A1, 20.05.1997 | |||
| РЕЛЬСОВАЯ СИСТЕМА САМОПОДЪЕМНОЙ ОПАЛУБКИ, СНАБЖЕННАЯ ЭЛЕМЕНТАМИ УДЛИНЕНИЯ ПОДЪЕМНЫХ РЕЛЬСОВ | 2009 |
|
RU2459058C2 |
| САМОПОДЪЕМНАЯ ОПАЛУБКА И/ИЛИ САМОПОДЪЕМНАЯ СБОРОЧНАЯ ЕДИНИЦА СТРОИТЕЛЬНЫХ ЛЕСОВ С ПОДЪЕМНЫМ ЦИЛИНДРОМ | 2006 |
|
RU2369705C1 |
| EP 2995749 B1, 08.06.2022 | |||
| WO 2007000139 A1, 04.01.2007. | |||

