Область техники, к которой относится изобретение
Настоящее изобретение относится к координатно-измерительной машине (также называемой просто измерительной машиной) для определения пространственных координат на объекте измерения, содержащей измерительную головку (также называемую щуповой головкой) с измерительным датчиком, несущую конструкцию, выполненную для перемещения измерительной головки относительно объекта измерения, контактный щуп для прикосновения к объекту измерения и пассивный поворотно-наклонный механизм (также известный как поворотный механизм), посредством которого контактный щуп связан с измерительной головкой с возможностью изменения положения в пространстве.
Кроме того, изобретение относится к пассивному поворотно-наклонному механизму для такой координатно-измерительной машины.
Уровень техники
Подобная координатно-измерительная машина и подобный поворотно-наклонный механизм известны, например, из публикации DE 19605776 А1. Известная координатно-измерительная машина имеет измерительную головку с контактным щупом, закрепленным на нижнем свободном конце вертикально расположенной пиноли. Пиноль установлена с возможностью перемещения в вертикальном направлении, в результате чего измерительная головка может перемещаться перпендикулярно рабочему столу, который служит для размещения (базирования) объекта измерения. Пиноль, в свою очередь, расположена на траверсе портала с возможностью перемещения по этой траверсе в первом горизонтальном направлении. Портал может перемещаться вместе с пинолью во втором горизонтальном направлении, так что измерительная головка имеет возможность перемещения в общей сложности по трем перпендикулярным друг другу координатным осям. Максимальные пути перемещения измерительной головки по трем координатным осям определяют измерительный объем, в пределах которого можно определять пространственные координаты на объекте измерения.
Для проведения измерения объект измерения располагают на рабочем столе. Затем к выбранным точкам измерений на объекте измерения прикасаются свободным кончиком (наконечником) контактного щупа. Тогда по положению измерительной головки внутри измерительного объема, а также по отклонениям контактного щупа относительно измерительной головки можно определить пространственные координаты точки измерения, к которой прикоснулся щуп. Путем определения нескольких пространственных координат в различных точках измерений можно определять геометрические размеры объекта измерения и даже его контур. Типичной областью применения подобных координатно-измерительных машин является измерение изделий для контроля качества.
Часто находящиеся на объекте измерения точки измерений оказываются в труднодоступном для контактного щупа месте, например в случае, если требуется определить глубину отверстия, расположенного на объекте измерения сбоку. Для того чтобы добраться до таких "спрятанных" точек измерений, известно применение различных контактных щупов и/или комбинаций контактных щупов. Например, существуют конфигурации контактных щупов, в которых контактный щуп расположен поперек оси Z координатно-измерительной машины. Для решения разнообразных и сложных измерительных задач требуется часто менять контактные щупы и/или комбинации контактных щупов. Это является недостатком, поскольку на замену контактных щупов уходит время, и поэтому время, затрачиваемое на проведение измерения, удлиняется. Кроме того, имеющиеся в распоряжении комбинации контактных щупов имеют ограниченную гибкость. Если, например, требуется определить глубину высверленного отверстия, проходящего с наклоном к поверхности объекта измерения на 45°, потребуется подходящий для этого контактный щуп или подходящая комбинация контактных щупов.
В упомянутой выше публикации DE 19605776 А1 предлагается контактный щуп с пассивным поворотно-наклонным механизмом. Поворотно-наклонный механизм позволяет изменять пространственное положение контактного щупа относительно измерительной головки. Например, с помощью такого механизма контактный щуп можно наклонить относительно оси Z, например, на угол 30° или 40° и дополнительно повернуть вокруг оси Z. Поворотно-наклонный механизм, известный из DE 19605776 А1, не имеет привода для совершения таких движений поворота и наклона (отсюда название "пассивный поворотно-наклонный механизм"). Для изменения положения контактного щупа в измерительном объеме координатно-измерительной машины расположен упор в виде звездообразного тела. Контактный щуп с помощью приводов координатно-измерительной машины вводят в один из промежутков между зубцами звездообразного тела до тех пор, пока он там не будет там зажат. Затем измерительную головку координатно-измерительной машины перемещают внутри измерительного объема, в результате чего пространственное положение контактного щупа относительно измерительной головки изменяется. Внутри поворотно-наклонного механизма расположен подпружиненный фиксатор, создаваемое которым усилие фиксации пересиливается движениями измерительной головки при зажатом контактном щупе.
Из публикации DE 2804398 А1 известна другая координатно-измерительная машина, в которой пространственное положение контактного щупа относительно измерительной головки может изменяться с помощью упора во время перемещения измерительной головки.
Однако подобные пассивные поворотно-наклонные механизмы не получили на практике широкого распространения. Большим недостатком этих механизмов является наличие упора, необходимого для изменения ориентации контактного щупа. Этот упор приходится устанавливать в пределах располагаемого измерительного объема, что в действительности значительно сокращает измерительный объем, имеющийся в наличии для объекта измерения. Тем же, что на практике нашло разнообразное применение, явились измерительные головки с активными поворотно-наклонными механизмами для изменения ориентации контактного щупа относительно измерительной головки. Активные поворотно-наклонные механизмы снабжены встроенными приводами, с помощью которых можно изменять ориентацию контактного щупа относительно измерительной головки. Примеры активных поворотно-наклонных механизмов раскрыты в публикациях ЕР 1126237 А2, US 5189806 или DE 3711644 А1. Однако у активных поворотно-наклонных механизмов имеется тот недостаток, что измерительный датчик, т.е. измерительный преобразователь, с помощью которого можно определять отклонения контактного щупа относительно измерительной головки, находится между контактным щупом и осями поворота и наклона (с точки зрения контактного щупа датчик расположен перед приводами). Вследствие этого расстояние между наконечником контактного щупа и соответствующей осью вращательного движения относительно велико. Как следствие, пути перемещения на объекте измерения должны быть относительно большими. Кроме того, в случае использования активных поворотно-наклонных механизмов максимальная общая масса контактных щупов или их комбинаций сравнительно мала, поскольку из-за недостатка места в измерительном датчике не устанавливаются тарировочные механизмы.
В публикации DE 4424225 А1 раскрыта измерительная головка с центральным измерительным датчиком и генераторами измерительной силы, позволяющими создавать заданное предварительное отклонение контактного щупа по трем взаимно перпендикулярным координатным осям. Измерительные головки такого рода используются во многих координатно-измерительных машинах, однако без поворотно-наклонных механизмов для контактного щупа или используемой комбинации контактных щупов.
Раскрытие изобретения
Исходя из рассмотренного уровня техники в основу настоящего изобретения была положена задача разработки координатно-измерительной машины указанного выше типа, которая обеспечивала бы очень высокую гибкость, быстроту и в то же время точность выполнения измерений на объектах измерений с множеством различных точек измерений. При этом максимальный располагаемый измерительный объем должен использоваться как можно эффективнее.
Одним объектом изобретения является координатно-измерительная машина указанного выше типа, в которой пассивный поворотно-наклонный механизм содержит передачу, имеющую входную и выходную стороны, причем с выходной стороны передача связана с контактным щупом с возможностью изменения положения контактного щупа относительно измерительной головки, а с входной стороны - имеет по меньшей мере одно место доступа для приложения внешнего вращающего момента для изменения положения контактного щупа. При этом предлагаемая в изобретении координатно-измерительная машина также содержит линейный упор, выполненный, в частности, в виде зубчатой рейки и имеющий продольное измерение, причем измерительная головка имеет возможность перемещения относительно линейного упора вдоль его продольного измерения.
Благодаря этому линейному упору изобретение позволяет очень простым и экономичным образом создавать внешний движущий момент, прикладываемый к поворотно-наклонному механизму, с помощью имеющихся у координатно-измерительной машины исполнительных приводов. Предпочтительно, чтобы линейный упор был расположен в центральной области координатно-измерительной машины.
Еще одним объектом изобретения является поворотно-наклонный механизм, содержащий средство сопряжения для разъемного присоединения к измерительной головке, опору для установки контактного щупа и передачу, имеющую входную и выходную стороны, причем с выходной стороны передача связана с опорой с возможностью изменения положения контактного щупа относительно измерительной головки, а с входной стороны - имеет по меньшей мере одно место доступа для приложения внешнего движущего момента для изменения положения контактного щупа.
Предлагаемая в изобретении координатно-измерительная машина сочетает в себе преимущества измерительной головки с центральным измерительным датчиком с преимуществами, которые дает контактный щуп, поворачиваемый относительно измерительной головки. В противоположность известным ранее предложениям предлагаемая в изобретении координатно-измерительная машина не нуждается в упоре, на который контактный щуп опирается или в котором он зажимается для изменения положения контактного щупа, т.е. его перестановки, относительно измерительной головки. В отличие от известных решений пассивный поворотно-наклонный механизм имеет передачу с внешним местом доступа, позволяющим прикладывать непосредственно к самому поворотно-наклонному механизму крутящий, или движущий, момент. Этот движущий момент можно создавать, например, электрическим приводом, который, однако, в отличие от активных поворотно-наклонных механизмов расположен за пределами механизма, предпочтительно как можно ближе к центру координатно-измерительной машины. Например, вал внешнего электрического привода может входить в соответствующее гнездо поворотно-наклонного механизма, находясь в зацеплении с этим гнездом, для приложения к входной стороне передачи движущего момента для изменения положения контактного щупа.
В предпочтительном же варианте выполнения координатно-измерительной машины, который подробнее рассматривается ниже при описании осуществления изобретения, координатно-измерительная машина использует уже имеющиеся исполнительные приводы координатно-измерительной машины, т.е. в предпочтительном варианте дополнительных приводов не требуется.
Предлагаемая в изобретении координатно-измерительная машина независимо от ее практической реализации имеет то преимущество, что измерительный объем практически без ограничений доступен для расположения в нем объекта измерения. Кроме того, внешний движущий момент может прикладываться к поворотно-наклонному механизму в центральном положении измерительной головки внутри измерительного объема, благодаря чему для изменения пространственной ориентации контактного щупа требуются лишь небольшие пути перемещений. Центральный измерительный датчик, расположенный, если смотреть от контактного щупа, после осей поворота и наклона, может быть выполнен гораздо более сложным, чем в активных поворотно-наклонных шарнирах, поскольку имеющееся в распоряжении конструктивное пространство оказывает весьма небольшое влияние на удобство доступа к объекту измерения. Существенным преимуществом является возможность использования измерительной головки с одним или несколькими генераторами измерительной силы, которые позволяют, с одной стороны, создавать предварительное отклонение контактного щупа, а с другой стороны, обеспечивают тарирование. Благодаря центральному измерительному датчику можно сравнительно просто интегрировать и другие тарировочные механизмы или использовать их далее.
С другой стороны, предлагаемая в изобретении координатно-измерительная машина дает все преимущества, которые следует из возможности управляемого изменения положения контактного щупа относительно измерительной головки. В частности, сложные объекты измерения с различными точками измерений можно измерять меньшим количеством контактных щупов и/или комбинаций контактных щупов. Поскольку можно сократить число замен контактных щупов, которые приходилось делать ранее, предлагаемая в изобретении координатно-измерительная машина позволяет очень быстро решать сложные измерительные задачи. Кроме того, центральный измерительный датчик позволяет выполнять очень точные измерения.
Таким образом, указанная выше задача полностью решена.
В предпочтительном варианте осуществления изобретения поворотно-наклонный механизм содержит по меньшей мере один блокировочный механизм, имеющий разомкнутое состояние и замкнутое состояние, причем в разомкнутом состоянии блокировочный механизм освобождает контактный щуп, давая возможность изменить положение контактного щупа посредством передачи, а в замкнутом состоянии блокировочный механизм блокирует контактный щуп, препятствуя его повороту.
В другом варианте контактный щуп может также удерживаться в своем положении, например, трением, преодолеваемым с помощью прикладываемого извне движущего крутящего момента. Использование блокировочного механизма, имеющего разомкнутое состояние и замкнутое состояние, обеспечивает по сравнению с фрикционным замыканием бóльшую силу фиксации, действующую на контактный щуп в замкнутом состоянии. Такая бóльшая сила фиксации обеспечивает более высокую точность измерения и препятствует непреднамеренному изменению положения контактного щупа, например, при касании объекта измерения.
В еще одном варианте осуществления изобретения поворотно-наклонный механизм имеет по меньшей мере первую и вторую оси вращения, причем первая ось вращения проходит в плоскости, параллельной контактному щупу, а вторая ось вращения проходит поперек контактного щупа. Предпочтительно, чтобы первая и вторая оси вращения были ортогональны друг другу.
В этом варианте осуществления изобретения поворотно-наклонный механизм позволяет гибко устанавливать контактный щуп во множестве положений, находящихся в пределах некоторого шарового сегмента. В другом варианте настоящее изобретение также может быть реализовано в механизме, имеющем лишь одну ось, относительно которой возможно движение контактного щупа, причем для упрощения понятие "поворотно-наклонный механизм" употребляется при раскрытии настоящего изобретения и для таких упрощенных механизмов. Большая гибкость, обеспечиваемая наличием двух осей вращения, позволяет осуществлять измерения с большей быстротой и вариативностью.
В еще одном варианте осуществления изобретения блокировочный механизм содержит первое стопорное устройство и второе стопорное устройство, причем первое стопорное устройство блокирует контактный щуп относительно первой оси вращения, а второе стопорное устройство блокирует контактный щуп относительно второй оси вращения. В этом варианте осуществления изобретения контактный щуп можно целенаправленно освобождать для поворота относительно первой или второй оси вращения. В частности, этот вариант осуществления изобретения позволяет изменять положение контактного щупа относительно одной из осей вращения, в то время как относительно второй оси вращения контактный щуп застопорен, так что относительно этой второй оси вращения контактный щуп стабильно удерживается в неподвижном состоянии. Этот вариант осуществления изобретения дает возможность очень точного изменения положения (перестановки) контактного щупа и, как следствие, обеспечивает очень высокую точность измерений.
В еще одном варианте осуществления изобретения передача выполнена с возможностью изменения положения контактного щупа относительно первой или второй осей вращения.
В этом варианте осуществления изобретения по меньшей мере отдельные детали передачи используются для перестановки как относительно первой оси вращения, так и относительно второй оси вращения. Таким образом, речь идет о передаче, которая при необходимости имеет несколько альтернативных выходных сторон. В другом варианте каждая ось вращения может быть связана с собственной, отдельной передачей. Предпочтительный же вариант осуществления изобретения по сравнению с этим обеспечивает уменьшение веса, что является выгодным в отношении длин и конфигураций используемых контактных щупов. Особенно выгоден этот вариант осуществления изобретения в комбинации с первым и вторым стопорными устройствами, блокирующими поворотно-наклонный механизм относительно первой и второй осей вращения и расцепляемыми по отдельности. Эта комбинация делает конструкцию предлагаемого в изобретении поворотно-наклонного механизма очень простой и легкой. Благодаря применению отдельных стопорных устройств передача может быть реализована с меньшим числом деталей.
В еще одном варианте осуществления изобретения поворотно-наклонный механизм содержит по меньшей мере одно управляющее устройство, выполненное с возможностью перевода по меньшей мере одного блокировочного механизма из замкнутого состояния в разомкнутое состояние.
В этом варианте осуществления изобретения контактный щуп можно целенаправленно разблокировать с помощью управляющего устройства, чтобы установить новое положение контактного щупа. Управляющее устройство предпочтительно интегрировать в поворотно-наклонный механизм, что позволяет обойтись без модификации измерительной головки.
В еще одном варианте осуществления изобретения поворотно-наклонный механизм имеет дополнительное место доступа, предназначенное для воздействия на управляющее устройство.
Этот вариант осуществления изобретения позволяет простым образом дооборудовать уже существующие координатно-измерительные машины новым поворотно-наклонным механизмом.
В еще одном варианте осуществления изобретения поворотно-наклонный механизм содержит приводное колесо, прежде всего зубчатое колесо с наружным зубчатым венцом, которое образует дополнительное место доступа.
Как поясняется ниже при рассмотрении предпочтительного варианта осуществления изобретения, приводное колесо, например зубчатое колесо с наружным зубчатым венцом, позволяет простым и экономичным образом создавать и прикладывать движущий момент с помощью исполнительных приводов, уже имеющихся у координатно-измерительной машины. В принципе, вместо зубчатого колеса можно также использовать фрикционную передачу.
В еще одном варианте осуществления изобретения управляющее устройство имеет по меньшей мере три состояния, причем в его первом состоянии блокировочный механизм блокирует контактный щуп относительно всех осей вращения, а во втором и третьем состояниях блокировочный механизм освобождает контактный щуп для поворота относительно соответствующей оси вращения.
Этот вариант осуществления изобретения обеспечивает особенно легкую и компактную реализацию предлагаемого в изобретении поворотно-наклонного механизма, использующую все преимущества вышеупомянутых вариантов осуществления изобретения.
В еще одном варианте осуществления изобретения передача содержит второе приводное колесо, прежде всего второе зубчатое колесо с наружным зубчатым венцом, которое образует место доступа для приложения внешнего движущего момента.
Как отмечено выше, зубчатое колесо с наружным зубчатым венцом представляет собой очень простое, легкое и экономичное средство, позволяющее создавать внешний движущий момент с помощью исполнительных приводов, уже имеющихся у координатно-измерительной машины. В принципе, для этого можно использовать и фрикционную передачу. Оба этих варианта очень просты и экономичны в осуществлении.
В еще одном варианте осуществления изобретения поворотно-наклонный механизм содержит по меньшей мере один эксцентрик, соединенный со вторым приводным колесом с фиксацией от проворачивания. В другом варианте осуществления изобретения еще один эксцентрик расположен на корпусе, установленном с возможностью поворота вокруг первой оси вращения вместе с контактным щупом.
Такие эксцентрики позволяют очень просто и точно устанавливать соответствующее положение контактного щупа относительно измерительной головки. Для этого в предпочтительном варианте можно использовать измерительный датчик, при этом измерительная головка касается эксцентриком известной точки измерения (опорная точка измерения). Использование эксцентриков позволяет простым образом определять соответствующее положение контактного щупа относительно каждой из осей вращения.
В еще одном варианте осуществления изобретения несущая конструкция имеет траверсу, на которой расположена зубчатая рейка, причем измерительная головка имеет возможность перемещения относительно траверсы.
В координатно-измерительной машине портальной или мостовой компоновки линейный упор предпочтительно располагать на траверсе портала, или мостике, что позволяет изменять положения контактного щупа перемещениями на особенно малые расстояния. Кроме того, измерительный объем такой координатно-измерительной машины полностью свободен для установки объекта измерения.
В еще одном варианте осуществления изобретения измерительная головка содержит по меньшей мере один генератор измерительной силы, способный создавать предварительное отклонение контактного щупа.
Этот вариант осуществления изобретения выгоден, поскольку он позволяет использовать фактор измерительной силы для соединения поворотно-наклонного механизма с источником, создающим внешний движущий момент, например описанной выше зубчатой рейкой и/или внешним электрическим приводом.
В еще одном варианте осуществления изобретения поворотно-наклонный механизм установлен на измерительной головке съемным образом.
Этот вариант осуществления изобретения позволяет использовать поворотно-наклонный механизм на измерительной головке в качестве замены обычным контактным щупам или комбинациям контактных щупов. Кроме того, в этом варианте осуществления изобретения возможно простое и экономичное дооснащение существующих координатно-измерительных машин.
Разумеется, что рассмотренные выше и рассматриваемые ниже признаки могут использоваться в рамках осуществления изобретения не только в конкретных описанных комбинациях, но и в других комбинациях либо по отдельности.
Краткое описание чертежей
Ниже приведено описание вариантов осуществления изобретения со ссылкой на чертежи, на которых показано:
на фиг.1 - координатно-измерительная машина в одном варианте осуществления настоящего изобретения,
на фиг.2 - упрощенное изображение измерительной головки с датчиком и генератором измерительной силы,
на фиг.3 - предпочтительный вариант выполнения поворотно-наклонного механизма для показанной на фиг.1 координатно-измерительной машины, в разрезе вертикальной плоскостью,
на фиг.4-8 - поворотно-наклонный механизм, показанный на фиг.3, в различных рабочих состояниях.
Осуществление изобретения
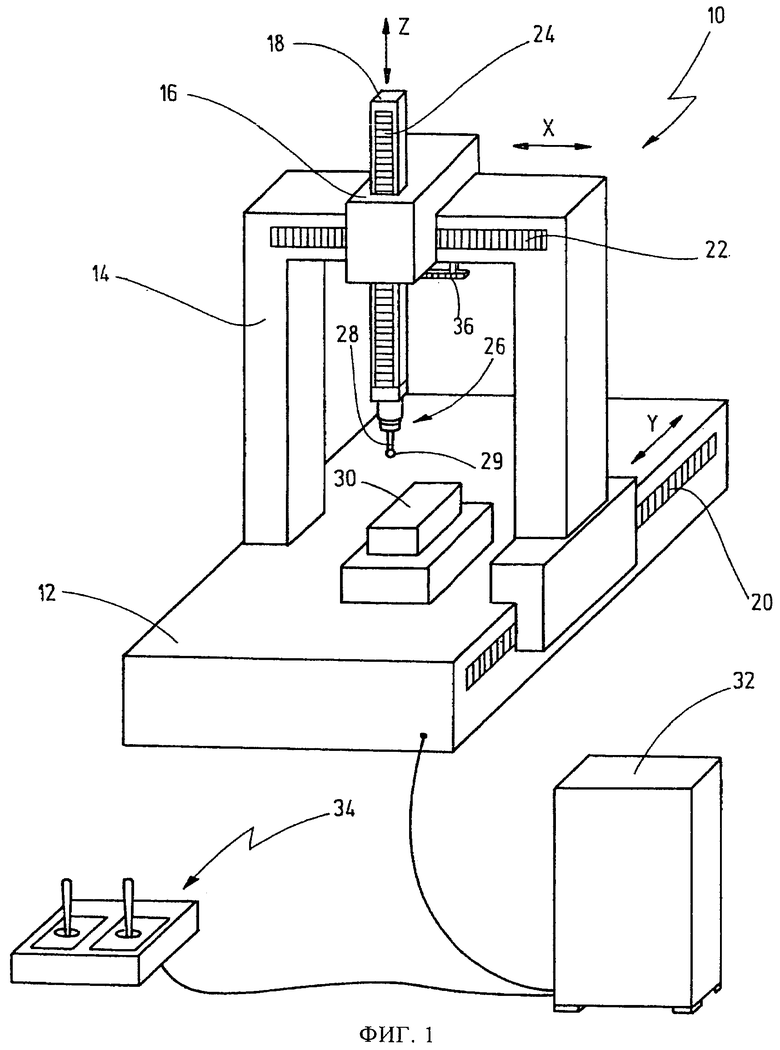
На фиг.1 в качестве примера представлен вариант выполнения предлагаемой в изобретении новой координатно-измерительной машины, которая в целом обозначена номером 10. Координатно-измерительная машина 10 в этой компоновке имеет основание 12, на котором с возможностью перемещения в продольном направлении установлен портал 14. Направление движения портала 14 относительно основания 12 обычно обозначают как ось Y. На расположенной вверху траверсе портала 14 расположена каретка 16, установленная с возможностью перемещения в поперечном направлении. Поперечное направление обычно обозначают как ось X. На каретке 16 закреплена пиноль 18, имеющая возможность перемещения в направлении оси Z, т.е. перпендикулярно основанию 12. Номерами 20, 22, 24 обозначены измерительные устройства, с помощью которых можно определять положение портала 14, каретки 16 и пиноли 18. Как правило, в качестве измерительных устройств 20, 22, 24 используют стеклянные масштабные линейки, риски которых считываются с помощью пригодных для этого датчиков.
На нижнем свободном конце пиноли 18 расположена измерительная головка 26 с контактным щупом 28. Контактный щуп 28 на своем нижнем свободном конце имеет шарик 29, который служит для прикосновения к объекту 30 измерения в точке измерения. С помощью измерительных устройств 20, 22, 24 можно определять положение измерительной головки 26 в пределах измерительного объема при касании щупом точки измерения. Тогда в зависимости от положения измерительной головки можно определять пространственные координаты точки измерения, которой касается щуп.
Номером 32 обозначен блок управления и обработки данных. Блок 32 управления и обработки данных служит, с одной стороны, для управления механическими приводами, обеспечивающими движения измерительной головки 26 по трем координатным осям X, Y и Z. Кроме того, блок 32 управления и обработки данных считывает показания измерительных устройств 20, 22, 24 и в зависимости от них, а также в зависимости от отклонений контактного щупа 28 определяет фактические пространственные координаты точки измерения, а при необходимости и другие геометрические характеристики объекта 30 измерения. Номером 34 обозначен пульт управления, который может быть дополнительно предусмотрен для управления перемещением измерительной головки 26 в режиме ручного управления.
В одном варианте осуществления изобретения на траверсе портала 14 закреплена зубчатая рейка 36. Зубчатая рейка 36 расположена таким образом, чтобы с помощью пиноли 18 измерительную головку 26 можно было переместить в зону зубчатой рейки 36, как это подробнее поясняется ниже при рассмотрении фиг.3-8. Вместо зубчатой рейки здесь можно расположить, например, поверхность трения, которая может обкатываться фрикционным колесом. Кроме того, в других вариантах осуществления изобретения здесь может быть установлен электрический привод, предназначенный для того, чтобы создавать внешний движущий момент для изменения положения контактного щупа 28. Кроме того, зубчатая рейка 36 или электрический привод (на чертеже не показан) также может быть расположена в другом месте в пределах измерительного объема координатно-измерительной машины 10, например на одной из колонн портала и/или на магазине контактных щупов, который для упрощения на чертеже не показан.
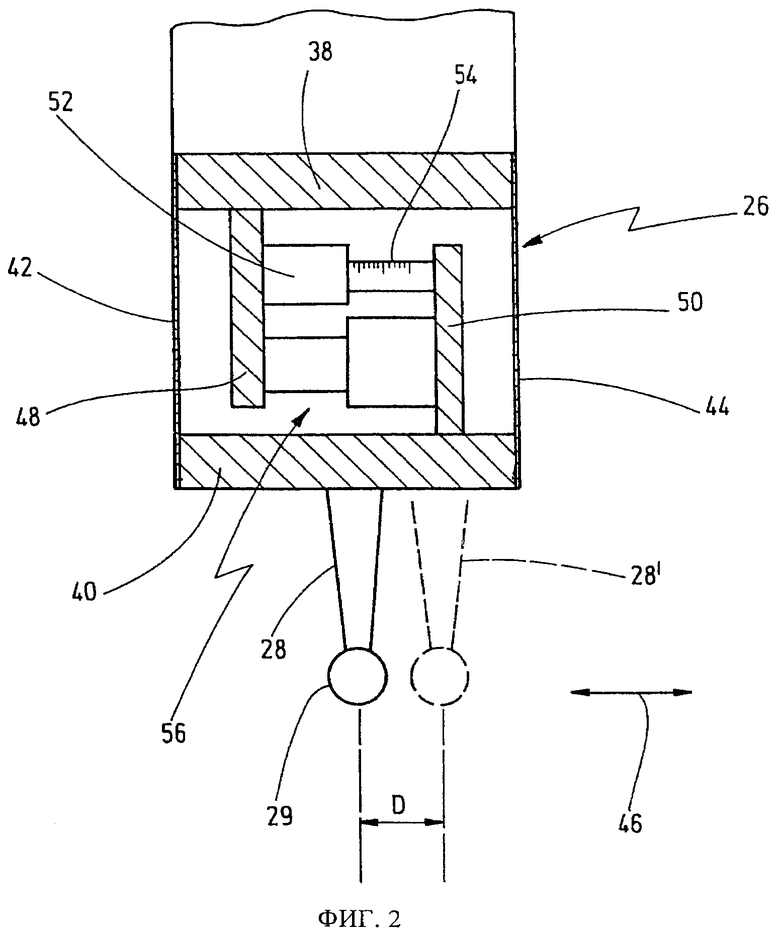
На фиг.2 в упрощенном, схематичном представлении иллюстрируется принцип работы измерительной головки 26. Измерительная головка 26 имеет неподвижную часть 38 и подвижную часть 40, соединенные друг с другом двумя пластинчатыми пружинами 42, 44. Пластинчатые пружины 42, 44 образуют пружинный параллелограмм, позволяющий подвижной части 40 перемещаться в направлении стрелки 46 (и обратно). Таким образом, контактный щуп 28 может отклоняться из своего нейтрального положения на расстояние D. Номером 28' схематически обозначен контактный щуп 28 в отклоненном положении.
Отклонение контактного щупа 28 относительно неподвижной части 38 может быть следствием прикосновения щупа к объекту 30 измерения в точке измерения. Отклонение контактного щупа предпочтительно учитывается при определении пространственных координат. Кроме того, в предпочтительных вариантах осуществления изобретения отклонение контактного щупа может создаваться с помощью генератора измерительной силы, как это подробнее поясняется ниже.
На неподвижной части 38 и подвижной части 40 расположено по одному упору 48, 50. Упоры 48, 50 выступают параллельно пластинчатым пружинам 42, 44 и параллельно друг другу. Между упорами 48, 50 расположены датчик 52 (в данном случае представлен измерительной шкалой 54) и генератор 56 измерительной силы. Датчик 52 может представлять собой подвижную катушку (также известную как звуковая катушка), измерительный преобразователь Холла, пьезорезистивный датчик или какой-либо иной датчик, с помощью которого можно определить пространственное отклонение контактного щупа 28 относительно неподвижной части 38. Генератор 56 измерительной силы может быть, например, подвижной катушкой (катушкой линейного электропривода), с помощью которой оба упора 48, 50 можно притягивать друг к другу или отжимать друг от друга.
Измерительная головка 26, показанная на фиг.2 упрощенно, обеспечивает возможность отклонения контактного щупа только в направлении стрелки 46.
Однако специалистам известно, что подобная измерительная головка, как правило, допускает соответствующее отклонение в направлении двух других ортогональных осей пространственной системы координат. Вариант выполнения подобной измерительной головки описан в упомянутой выше публикации DE 4424225 А1, содержание которой включено в описание путем ссылки. Однако возможности осуществления изобретения не ограничиваются этим особым исполнением измерительной головки и допускают применение других измеряющих или переключающих измерительных головок.
Специалистам известно, что измерительная головка, изображенная на фиг.2 в сильно упрощенной форме, как правило, имеет опору, на которой контактный щуп 28 крепится с возможностью его замены.
В предпочтительном варианте осуществления изобретения вместо контактного щупа 28 в опору измерительной головки 26, предназначенную для контактных щупов, вставляется поворотно-наклонный механизм с контактным щупом 28, что позволяет закреплять на измерительной головке 26 на выбор поворотно-наклонный механизм или обычный контактный щуп. Предпочтительный вариант выполнения поворотно-наклонного механизма рассмотрен ниже подробнее со ссылкой на фиг.3-8.
Предпочтительный поворотно-наклонный механизм в целом обозначен на фиг.3-8 номером 60. Поворотно-наклонный механизм 60 имеет на своем верхнем конце диск 62, пригнанный к имеющейся у измерительной головки 26 опоре для контактных щупов. В этом случае речь идет об обычном стыковочном диске, традиционно используемом в сменных контактных щупах. Стыковочный диск 62 закреплен на основе 64. Основа 64 представляет собой неподвижное звено поворотно-наклонного механизма 60. На ее нижнем свободном конце установлено первое зубчатое колесо 66 с радиальным наружным зубчатым венцом 67 (т.е. цилиндрическое зубчатое колесо). Зубчатое колесо 66 установлено на основе 64 с возможностью поворота относительно вертикальной оси 68 поворотно-наклонного механизма 60.
Основа 64 в рассматриваемом варианте имеет выполненную внутри нее полость, на дне которой закреплена штанга 70, проходящая вертикально вниз. Штанга 70 на своем нижнем свободном конце имеет тарелку 72, на которую опирается винтовая пружина 74.
Концентрично со штангой 70 установлена трубка 76, способная вертикально перемещаться по штанге 70 (см. фиг.4). Трубка 76 имеет на своем нижнем конце конусный элемент 78, а на своем верхнем конце - двухконусный элемент 80, неподвижно соединенные с трубкой 76.
Номером 82 обозначен осевой корпус, расположенный концентрично с трубкой 76. Осевой корпус 82 прижимается пружиной 74 к нижнему концу основы 64. Между обращенными друг к другу торцевыми поверхностями основы 64 и осевого корпуса 82 расположен узел 84 шарикового зацепления. Узел 84 шарикового зацепления образует первое стопорное устройство, посредством которого осевой корпус 82 опирается на основу 64 с фиксацией от проворачивания. Узел 84 шарикового зацепления включает в себя первую и вторую цепочки шариков, причем первая цепочка шариков расположена в кольцевом пазу на нижнем свободном конце основы 64, а вторая цепочка шариков расположена в соответствующем кольцевом пазу на верхнем конце осевого корпуса 82. Шарики вдавливаются в зацепление между собой усилием затяжки пружины 74. Вместо зацепления типа "шарики с шариками" может использоваться зацепление типа "шарики с роликами", торцовое зубчатое зацепление или другой подходящий блокировочный механизм.
На верхнем конце осевого корпуса 82 (под узлом 84 шарикового зацепления) установлено второе зубчатое колесо 86 с радиальным наружным зубчатым венцом 88. Зубчатое колесо 86 имеет возможность вращения вместе с осевым корпусом 82 вокруг вертикальной оси 68, как только узел 84 шарикового зацепления разомкнется рассматриваемым ниже образом. В показанной на фиг.3 рабочей ситуации зубчатое колесо 86 застопорено от проворачивания узлом 84 шарикового зацепления.
Осевой корпус 82 имеет на своей боковой поверхности под зубчатым колесом 86 опору, в которой с возможностью поворота установлен полый вал 90. Полый вал 90 вытянут перпендикулярно вертикальной оси 68 и может поворачиваться вокруг поперечной оси 91 (фиг.7). На полом валу 90 установлено еще одно зубчатое колесо 92 с радиальными наружными зубьями 94. Наружные зубья 94 находятся в зацеплении с торцевым зубчатым венцом 96, расположенным в виде замкнутого кольца на нижней стороне зубчатого колеса 86.
Кроме того, на полом валу 90 установлен еще один осевой корпус 98, соединенный с фиксацией от проворачивания с зубчатым колесом 92. Осевой корпус 98 блокируется с фиксацией от проворачивания еще одним узлом 100 шарикового зацепления у боковой поверхности первого осевого корпуса 82. Узел 100 шарикового зацепления образует второе стопорное устройство, которое замкнуто, пока осевой корпус 98 прижимается еще одной пружиной 102 к первому осевому корпусу 82. В этом случае также вместо зацепления типа "шарики с шариками" может использоваться зацепление типа "шарики с роликами" или торцовое зубчатое зацепление.
Наружные зубья 94 зубчатого колеса 92 проходят не по всей наружной окружности зубчатого колеса 92, а лишь по дуге длиной примерно 270°. В секторе зубчатого колеса 92, где наружные зубья 94 отсутствуют, в соответствующем держателе съемным образом закреплен контактный щуп 28.
На торцевой поверхности осевого корпуса 98, обращенной к боковой поверхности первого осевого корпуса 82, расположен толкатель 104 (фиг.6), который своим свободным концом опирается на коническую поверхность конусного элемента 78. За счет подъема конусного элемента 78 толкатель 104 отжимается наружу, в результате чего узел 100 шарикового зацепления размыкается, делая возможным вращательное движение зубчатого колеса 92.
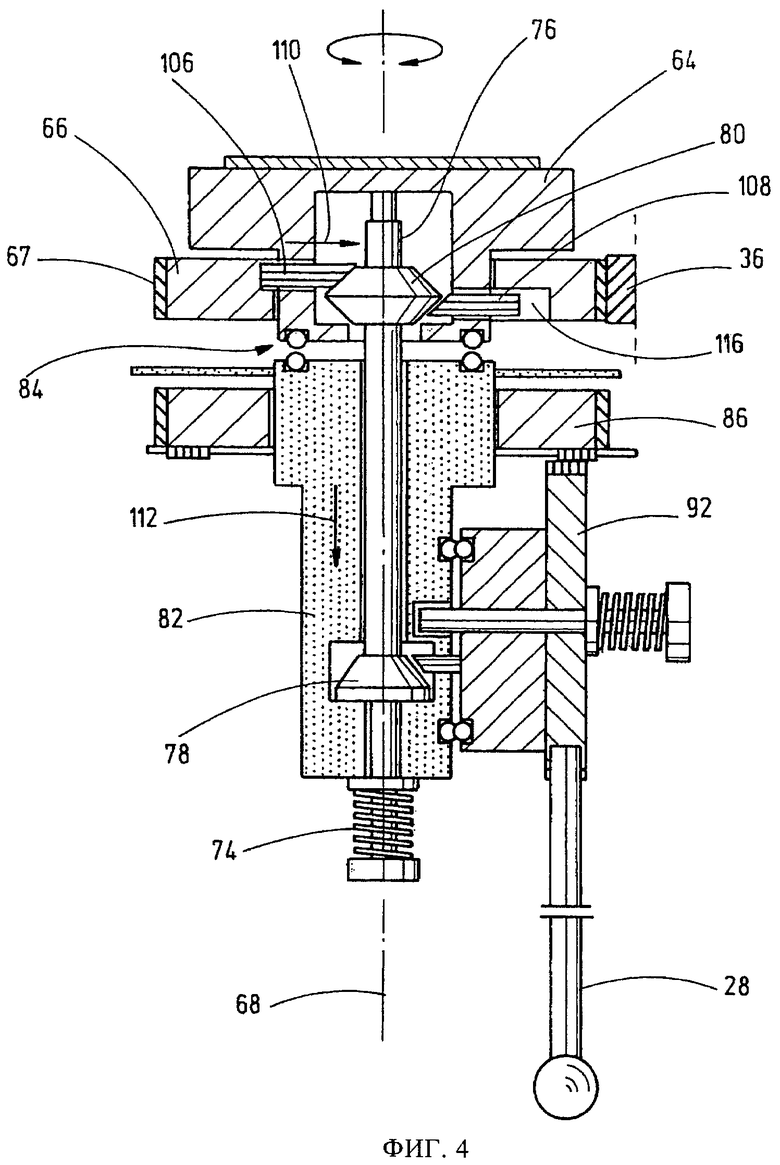
Аналогичным образом двухконусный элемент 80 взаимодействует на верхнем конце трубки 76 с двумя другими толкателями 106, 108 (фиг.4). Толкатели 106, 108 могут быть установлены с подпружиниванием, что позволяет расположить их в заданном исходном положении. Основа 64 имеет на своем нижнем свободном конце два радиальных высверленных отверстия, в каждом из которых расположен с возможностью перемещения соответствующий толкатель 106, 108. Толкатели 106, 108 находятся в одной плоскости с первым зубчатым колесом 66. Толкатель 106 опирается на верхнюю коническую поверхность двухконусного элемента 80, а толкатель 108 прилегает к нижней конической поверхности двухконусного элемента 80. Если надавить на толкатель 106 в направлении стрелки 110 (фиг.4), он посредством двухконусного элемента 80 отожмет трубку 76 вниз, преодолев силу упругости пружины 74. Поскольку конусный элемент 78 на нижнем конце трубки 76 упирается в осевой корпус 82, это движение трубки 86 приведет к тому, что вниз будет отжат весь осевой корпус 82, в том числе второе зубчатое колесо 86 и третье зубчатое колесо 92. Это движение обозначено на фиг.4 стрелкой 112. Движением осевого корпуса 82 в направлении стрелки 112 стопорное устройство в виде первого узла 84 шарикового зацепления размыкается. В этом рабочем состоянии осевой корпус 82 вместе с застопоренным на нем зубчатым колесом 92 можно повернуть вокруг вертикальной оси 68.
Если же надавить на толкатель 108 радиально внутрь в направлении стрелки 114 (фиг.6), толкатель посредством двухконусного элемента 80 сдвинет трубку 76 вверх. За счет этого перемещения конусный элемент 78 приподнимается вверх и отжимает толкатель 104 радиально наружу, в результате чего второй узел 100 шарикового зацепления размыкается. В этом рабочем состоянии (фиг.6) зубчатое колесо 92 может быть повернуто относительно осевого корпуса 82.
Для приведения в действие толкателей 106, 108 зубчатое колесо 66 имеет расположенную радиально внутри эксцентрическую выемку 116. В показанном на фиг.3 рабочем состоянии выемка 116 расположена таким образом, что ни один из двух толкателей 106, 108 не сдвинут в направлении двухконусного элемента 80. Таким образом, трубка 76 вместе с конусным элементом 78 и двухконусным элементом 80 находится в исходном (нулевом) положении. Оба узла 84, 100 шарикового зацепления находятся в замкнутом состоянии. Контактный щуп 28 зафиксирован в заданном положении и в заданной ориентации относительно измерительной головки (на чертеже не показана).
Для того чтобы теперь изменить положение контактного щупа 28, т.е. переставить его, измерительную головку 26 координатно-измерительной машины 10 сначала перемещают в зону зубчатой рейки 36. Затем с помощью генераторов 56 измерительной силы зубчатое колесо 66 вводят в зацепление с зубчатой рейкой 36 (фиг.4). Теперь перемещением измерительной головки 26 параллельно зубчатой рейке 36 (в направлении оси X) создают движущий момент, воздействующий на зубчатое колесо 66. В зависимости от направления перемещения измерительной головки 26 относительно зубчатой рейки 36 зубчатое колесо 66 поворачивается по часовой стрелке или против часовой стрелки. В показанном на фиг.4 рабочем состоянии эксцентрическая выемка 116 за счет вращательного движения в области толкателя 108 "раскрывается". В области же толкателя 106 выемка 116 "закрывается", и толкатель 106 выдавливается внутрь в направлении стрелки 110. Вследствие этого трубка 76 отжимается вниз и уводит с собой осевой корпус 82, преодолевая силу упругости пружины 74. Теперь первый узел 84 шарикового зацепления разомкнут.
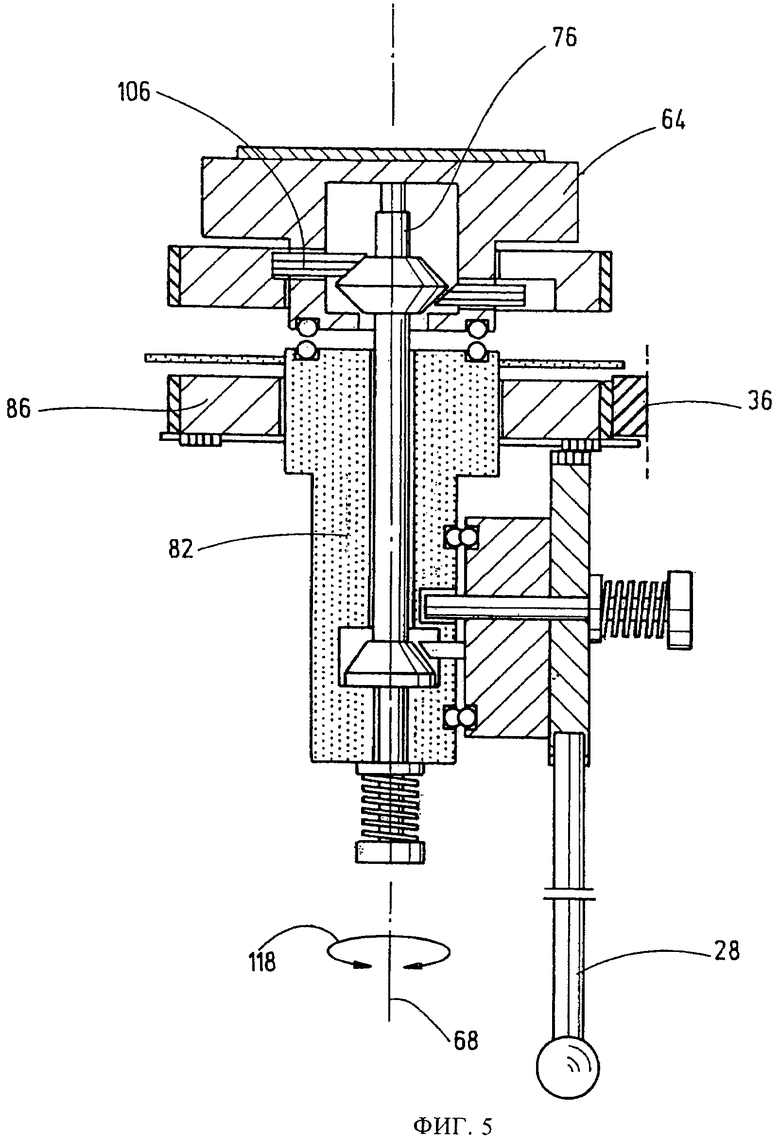
Как показано на фиг.5, измерительную головку 26 следующим действием перемещают в направлении оси Z, чтобы ввести в зацепление с зубчатой рейкой 36 второе зубчатое колесо 86. Далее, новым перемещением измерительной головки 26 вдоль оси Х и, соответственно, вдоль зубчатой рейки 36 осевой корпус 82 поворачивают вокруг вертикальной оси 68, как это показано на фиг.5 стрелкой 118. Как только будет достигнуто желаемое угловое положение контактного щупа 28 относительно вертикальной оси 68, перемещение измерительной головки 26 относительно зубчатой рейки 36 прекращают. С помощью генераторов 56 измерительной силы зубчатое колесо 86 выводят из зацепления с зубчатой рейкой 36. Затем пиноль 18 с измерительной головкой 26 снова перемещают в направлении оси Z и первое зубчатое колесо 66 снова вводят в зацепление с зубчатой рейкой 36 (фиг.4). Перемещением измерительной головки 26 вдоль зубчатой рейки 36 в противоположном направлении трубка 76 снова освобождается, и пружина 74 вдавливает осевой корпус 82 в узел шарикового зацепления на основе 64. Теперь вновь установленное угловое положение контактного щупа 28 зафиксировано.
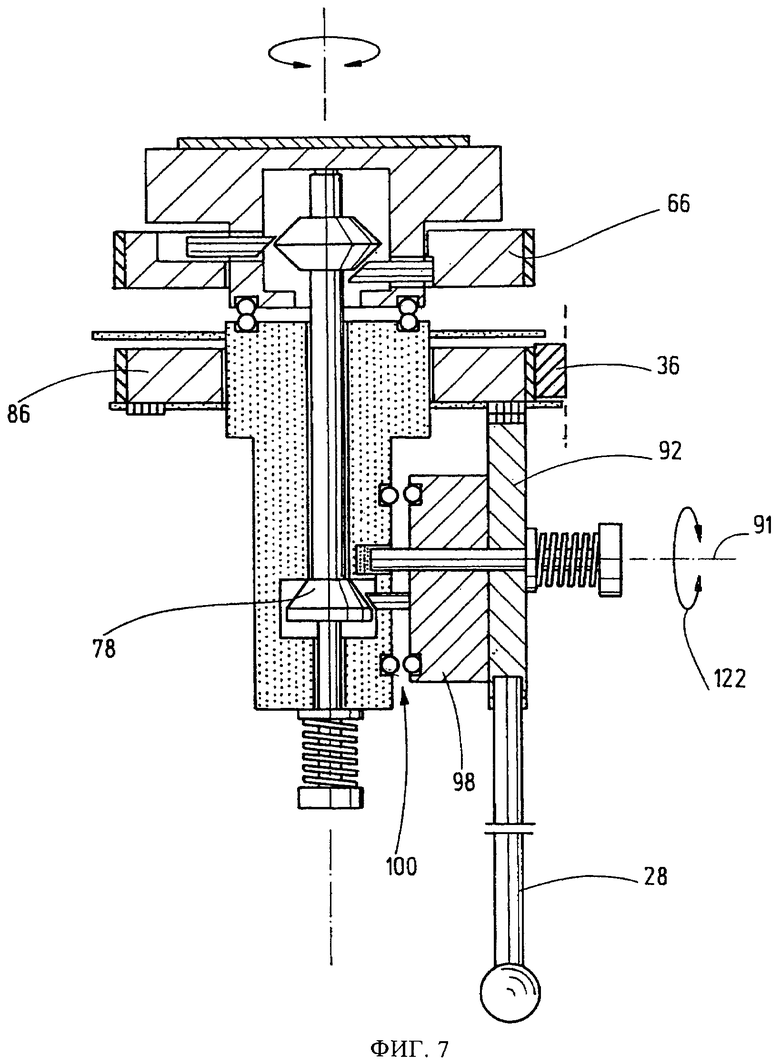
Изменение положения контактного щупа 28 относительно второй оси 91 вращения представлено на фиг.6 и 7. И в этом случае сначала вводят зубчатое колесо 66 в зацепление с зубчатой рейкой 36. Соответствующим перемещением измерительной головки 26 вдоль зубчатой рейки 36 поворачивают зубчатое колесо 66 таким образом, что толкатель 108 сдвигает двухконусный элемент 80 вверх. Тем самым толкатель 104 на втором осевом корпусе 98 отжимается радиально наружу (стрелка 120). Второй узел 100 шарикового зацепления размыкается. Затем измерительную головку 26 поднимают в направлении оси Z, чтобы ввести второе зубчатое колесо 86 в зацепление с зубчатой рейкой 36. Перемещением измерительной головки 26 вдоль зубчатой рейки 36 создают движущий момент, который посредством зубьев 94, 96 передается на зубчатое колесо 92. Вследствие этого контактный щуп 28 поворачивается вокруг поперечной оси 91, что показано на фиг.7 двусторонней стрелкой 122.
В предпочтительных вариантах осуществления изобретения длина толкателя 104 и угол конусности конусного элемента 78 подобраны таким образом, чтобы узел 100 шарикового зацепления не размыкался полностью, а оставался в состоянии минимального сцепления. Таким образом создается тормозящий момент, препятствующий обратному вращению контактного щупа 28 под действием силы тяжести при расцеплении зубчатого колеса 86 и зубчатой рейки 36. Для специалистов должно быть очевидным, что для создания соответствующего тормозящего момента можно использовать и другие средства, например электромагнит и/или рабочий элемент фрикционной передачи, который при разомкнутом узле 100 шарикового зацепления прилегает к зубчатому колесу 92.
Возвратом первого зубчатого колеса 66 в прежнее положение толкатель 108 устанавливается в свое исходное положение, и узел 100 шарикового зацепления снова блокирует контактный щуп 28.
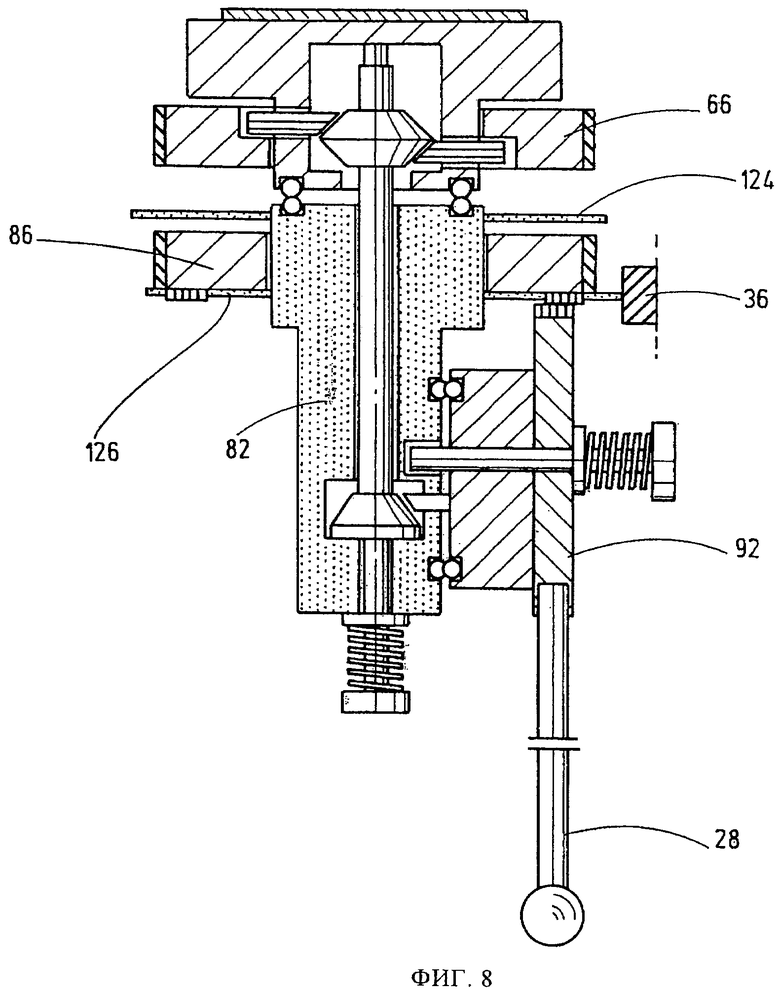
На фиг.8 показан вариант, позволяющий определять соответствующее положение контактного щупа 28 относительно измерительной головки 26. Для определения этого положения служат два эксцентриковых диска 124, 126. Первый эксцентриковый диск 124 соединен с осевым корпусом 82 с фиксацией от проворачивания и расположен концентрично с осевым корпусом 82, благодаря чему на внешней периферии эксцентрикового диска 124 можно определить угловое положение осевого корпуса 82 относительно вертикальной оси 68. Второй эксцентриковый диск 126 соединен с фиксацией от проворачивания со вторым зубчатым колесом 86 и расположен таким образом, что по эксцентриковому диску 126 можно определить угловое положение зубчатого колеса 86 относительно вертикальной оси 68. Теперь для определения пространственного положения контактного щупа 28 измерительную головку 26 подводят к зубчатой рейке 36 (или другой заданной опорной точке измерения положения) таким образом, чтобы эксцентриковый диск 126 коснулся зубчатой рейки 36. Тогда с помощью датчика 52 измерительной головки можно определить угловое положение зубчатого колеса 86. Затем измерительную головку 26 перемещают таким образом, чтобы зубчатой рейки 36 (или другой заданной опорной точки измерения положения) коснулся эксцентриковый диск 124. С помощью датчика 52 измерительной головки определяют угловое положение осевого корпуса 82. Поскольку в этом варианте осуществления изобретения угловое положение зубчатого колеса 86 представляет сумму угловых перемещений вокруг вертикальной оси 68 и поперечной оси 91, по разности угловых положений двух эксцентриковых дисков 124, 126 можно определить угловое положение контактного щупа 28 относительно поперечной оси 91. В другом варианте угловое положение контактного щупа 28 можно определять и иным образом, например с помощью датчиков приращений, расположенных в зоне зубчатого колеса 92 и в зоне осевого корпуса 82.
Еще один вариант осуществления изобретения, отличный от рассмотренных выше, предусматривает создание движущего момента для изменения положения контактного щупа 28 иными средствами, нежели с помощью зубчатой рейки 36 и соответствующего перемещения измерительной головки 26 вдоль зубчатой рейки 36. Например, движущий момент можно прикладывать с помощью электрического двигателя прямо к зубчатым колесам 66, 86. Предпочтительно, чтобы такой приводной двигатель (на чертежах не показан) также располагался в зоне траверсы портала 14.
Во всех описанных выше вариантах осуществления изобретения зубчатое колесо 86 образует передачу, с входной стороны которой (доступ через наружные зубья 94) можно прикладывать движущий момент для изменения положения контактного щупа 28. В зависимости от того, какую ось вращения должен переставить контактный щуп 28, зубчатое колесо 86 взаимодействует с зубчатым колесом 92 для передачи на контактный щуп 28 движущего момента. Узлы 84, 100 шарикового зацепления образуют блокировочный механизм, с помощью которого контактный щуп 28 освобождается или блокируется с фиксацией от проворачивания. Зубчатое колесо 66 образует вместе с толкателями 104-108 и вместе с трубкой 76 и конусными элементами 78, 80 управляющее устройство, с помощью которого блокировочный механизм можно по выбору перевести из замкнутого состояния в разомкнутое состояние. Весь поворотно-наклонный механизм 60 не имеет встроенного в него привода, что позволяет выполнить поворотно-наклонный механизм 60 очень легким и поэтому обеспечивает возможность его установки как единого целого в опору измерительной головки 26, предназначенную для контактных щупов. Оси 68, 91 вращения пассивного поворота находятся между контактным щупом 28 и центральным измерительным датчиком, что позволяет использовать все преимущества центрального измерительного датчика. В частности, с предлагаемым в изобретении поворотно-наклонным механизмом 60 можно использовать уже существующие сложные измерительные головки, не модифицируя последние. Разумеется, необходимо лишь внести соответствующие изменения в программное обеспечение по обработке данных, чтобы учесть соответствующее положение контактного щупа 28 относительно измерительной головки 26. Центральный измерительный датчик и предпочтительное центральное положение головки для приложения движущего момента практически не уменьшают располагаемый измерительный объем. Предпочтительно, чтобы зубчатая рейка 36 (или другой приводной механизм для создания движущего момента) была расположена в зоне верхнего крайнего положения измерительной головки 26 по оси Z, чтобы измерительный объем оставался в значительной мере свободным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Координатная измерительная машина | 1970 |
|
SU685903A1 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА | 1990 |
|
RU2068984C1 |
| Координатная измерительная машина | 1986 |
|
SU1425426A1 |
| Координатная измерительная машина | 1985 |
|
SU1397696A1 |
| Координатная измерительная машина | 1985 |
|
SU1698617A1 |
| Координатная измерительная машина | 1983 |
|
SU1226004A1 |
| Координатная измерительная машина | 1984 |
|
SU1227932A1 |
| Координатная измерительная машина | 1980 |
|
SU905609A1 |
| Координатный измерительный прибор | 1990 |
|
SU1770725A1 |
| Измерительная головка для координатных измерительных машин | 1980 |
|
SU968579A1 |

Изобретение относится к координатно-измерительной машине для определения пространственных координат на объекте измерения. Сущность: машина содержит измерительную головку с измерительным датчиком. Измерительная головка имеет возможность перемещения относительно объекта измерения. На измерительной головке крепится контактный щуп (28) для прикосновения к объекту измерения. Контактный щуп (28) присоединен к измерительной головке (26) посредством пассивного поворотно-наклонного механизма (60), обеспечивающего возможность изменения положения контактного щупа в пространстве. Этот пассивный поворотно-наклонный механизм (60) содержит передачу (86, 92), имеющую входную и выходную стороны, причем с выходной стороны передача связана с контактным щупом (28) с возможностью изменения положения контактного щупа (28) относительно измерительной головки (26), а с входной стороны - имеет по меньшей мере одно место доступа (88) для приложения внешнего движущего момента для изменения положения контактного щупа (28). Технический результат - повышение гибкости машины, быстроты и точности измерения на объектах с множеством различных точек измерений. 2 н. и 13 з.п. ф-лы, 8 ил.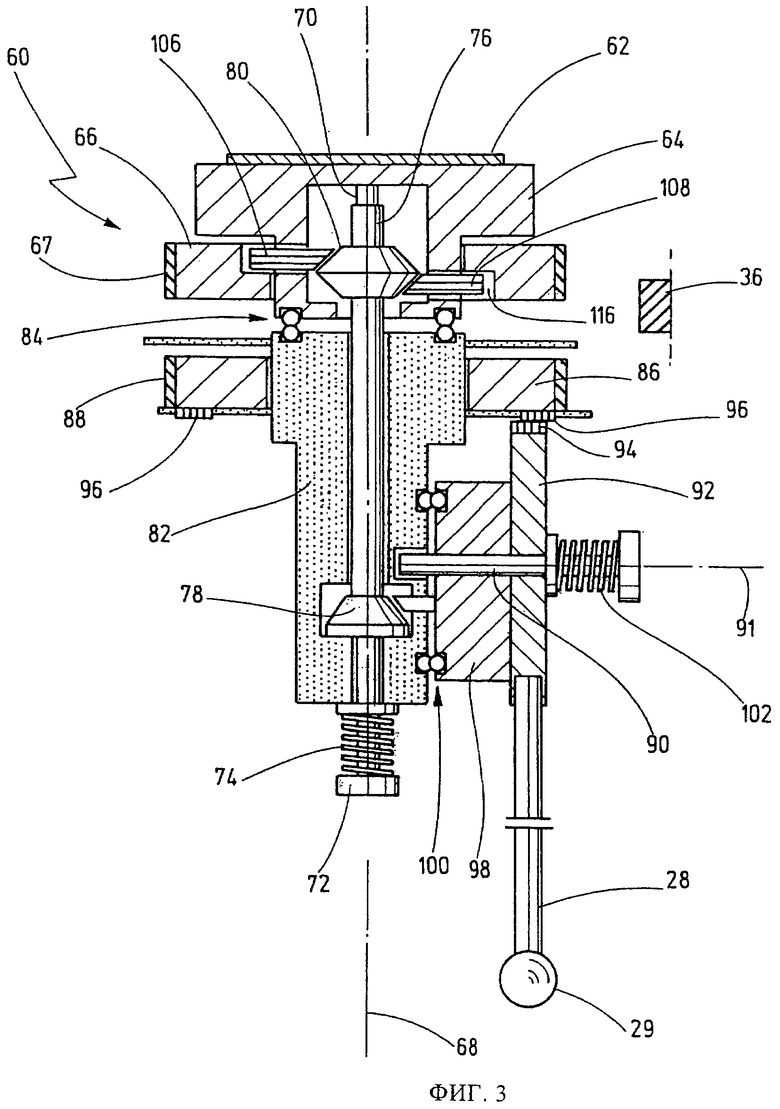
1. Координатно-измерительная машина для определения пространственных координат на объекте (30) измерения, содержащая измерительную головку (26) с измерительным датчиком (52), несущую конструкцию (14, 16, 18), выполненную для перемещения измерительной головки (26) относительно объекта (30) измерения, контактный щуп (28) для прикосновения к объекту (30) измерения и пассивный поворотно-наклонный механизм (60), посредством которого контактный щуп (28) присоединен к измерительной головке (26) с возможностью изменения положения контактного щупа в пространстве, причем пассивный поворотно-наклонный механизм (60) содержит передачу (86, 92), которая имеет входную и выходную стороны и с выходной стороны связана с контактным щупом (28) с возможностью изменения положения контактного щупа (28) относительно измерительной головки (26), а с входной стороны имеет по меньшей мере одно место (88) доступа для приложения внешнего движущего момента для изменения положения контактного щупа (28), причем координатно-измерительная машина также содержит линейный упор (36), имеющий продольное измерение, а измерительная головка (26) имеет возможность перемещения относительно линейного упора (36) вдоль его продольного измерения.
2. Координатно-измерительная машина по п.1, отличающаяся тем, что поворотно-наклонный механизм (60) содержит по меньшей мере один блокировочный механизм, имеющий разомкнутое состояние и замкнутое состояние, причем в разомкнутом состоянии блокировочный механизм освобождает контактный щуп (28), давая возможность изменить положение контактного щупа (28) посредством передачи (86, 92), а в замкнутом состоянии блокировочный механизм блокирует контактный щуп (28), препятствуя его повороту.
3. Координатно-измерительная машина по п.2, отличающаяся тем, что поворотно-наклонный механизм (60) имеет по меньшей мере первую (68) и вторую (91) оси вращения, причем первая ось (68) вращения проходит в плоскости, параллельной контактному щупу (28), а вторая ось (91) вращения проходит поперек контактного щупа (28).
4. Координатно-измерительная машина по п.3, отличающаяся тем, что блокировочный механизм содержит первое стопорное устройство (84) и второе стопорное устройство (100), причем первое стопорное устройство (84) блокирует контактный щуп (28) относительно первой оси (68) вращения, а второе стопорное устройство (100) блокирует контактный щуп (28) относительно второй оси (91) вращения.
5. Координатно-измерительная машина по п.4, отличающаяся тем, что передача (86, 92) выполнена с возможностью изменения положения контактного щупа (28) относительно первой (68) или второй (91) осей вращения.
6. Координатно-измерительная машина по п.2, отличающаяся тем, что поворотно-наклонный механизм (60) содержит по меньшей мере одно управляющее устройство (66, 76, 78, 80, 104, 106, 108), выполненное с возможностью перевода по меньшей мере одного блокировочного механизма из замкнутого состояния в разомкнутое состояние.
7. Координатно-измерительная машина по п.6, отличающаяся тем, что поворотно-наклонный механизм (60) имеет дополнительное место (67) доступа, предназначенное для воздействия на управляющее устройство (66, 76, 78, 80, 104, 106, 108).
8. Координатно-измерительная машина по п.7, отличающаяся наличием первого приводного колеса, прежде всего зубчатого колеса (66) с наружным зубчатым венцом (67), которое образует дополнительное место доступа.
9. Координатно-измерительная машина по п.6, отличающаяся тем, что управляющее устройство (66, 76, 78, 80, 104, 106, 108) имеет по меньшей мере три состояния, причем в его первом состоянии блокировочный механизм (84, 100) блокирует контактный щуп (28) относительно всех осей вращения, а во втором и третьем состояниях блокировочный механизм (84, 100) освобождает контактный щуп (28) для поворота относительно соответствующей оси (68, 91) вращения.
10. Координатно-измерительная машина по п.8, отличающаяся тем, что передача (86, 92) содержит второе приводное колесо, прежде всего второе зубчатое колесо (86) с наружным зубчатым венцом (88), которое образует место доступа (88).
11. Координатно-измерительная машина по п.10, отличающаяся наличием эксцентрика (126), соединенного со вторым приводным колесом (86) с фиксацией от проворачивания.
12. Координатно-измерительная машина по п.1, отличающаяся тем, что несущая конструкция (14, 16, 18) имеет траверсу, на которой расположен линейный упор (36), причем измерительная головка (26) имеет возможность перемещения относительно траверсы.
13. Координатно-измерительная машина по п.12, отличающаяся тем, что измерительная головка (26) содержит по меньшей мере один генератор (56) измерительной силы, способный создавать предварительное отклонение контактного щупа (28).
14. Координатно-измерительная машина по п.1, отличающаяся тем, что поворотно-наклонный механизм (60) установлен на измерительной головке (26) съемным образом.
15. Поворотно-наклонный механизм для координатно-измерительной машины по одному из пп.1-14, содержащий средство (62) сопряжения для разъемного присоединения к измерительной головке (26) и опору для установки контактного щупа (28), характеризующийся наличием передачи (86, 92), имеющей входную и выходную стороны, причем с выходной стороны передача связана с опорой с возможностью изменения положения контактного щупа (28) относительно измерительной головки (26), а с входной стороны - имеет по меньшей мере одно место (88) доступа для приложения внешнего движущего момента для изменения положения контактного щупа (28).
| ЛЕВИТАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2037436C1 |
| СИСТЕМА ПОДГОТОВКИ ДАННЫХ ДЛЯ АНАЛИЗА РЕЗУЛЬТАТОВ ПИЛОТИРОВАНИЯ | 2001 |
|
RU2179744C1 |
| Запорное устройство и способ управления запорным устройством | 1989 |
|
SU1666833A1 |
| US 5675902 A, 14.10.1997 | |||
| US 5185936 A, 16.02.1993. | |||

