Изобретение относится к электротехнике, а именно к бесконтактным многополюсным синхронным моментным электродвигателям с постоянными магнитами и может быть использовано в высокоточных управляемых безредукторных электроприводах систем автоматического управления.
Известны вентильные (бесконтактные) синхронные электродвигатели с постоянными магнитами, содержащие активный ротор с явно выраженными полюсами чередующейся полярности, образованными постоянными магнитами, и пазовый статор с размещенной в его пазах m-фазной распределенной обмоткой [Завалишин Д.А., Бардинский С.И., Певзнер О.Б. и др. Электрические машины малой мощности / Под общ. ред. Д.А.Завалишина // М.–Л.: Госэнергоиздат, 1963. 432 с., С. 199-205; Кенио Т., Нагамори С. Двигатели постоянного тока с постоянными магнитами // М.: Энергоатомиздат, 1989. 184 с., С. 54, 65-66 (рис. 4.13); Юферов Ф.М. Электрические машины автоматических устройств // М.: Высшая школа, 1988. 416 с., С. 105]. Указанные электродвигатели обладают высокой равномерностью развиваемого вращающего момента, а именно низкими пульсациями вращающего момента благодаря синусоидальности распределения потокосцепления магнитного потока постоянных магнитов с m-фазной распределенной обмоткой статора и соответственно наводимой в ее фазах электродвижущей силой (ЭДС), что обеспечивает высокую мгновенную стабильность – равномерность вращения ротора электродвигателя. К их недостаткам следует отнести невысокие значения развиваемого и удельного, относительно потребляемой электрической мощности и массогабаритных показателей, вращающего момента. Это обусловлено, в первую очередь, высокими потерями в обмотках ввиду большого объема и протяженности их лобовых частей, низкой энергоэффективностью формирования магнитодвижущей силы (МДС) фаз, как векторной суммы МДС отдельных витков, распределенных по пазам статора, и малым количеством (значением) числа пар полюсов ротора из-за большого числа пазов статора на полюс и на фазу для выполнения распределенной обмотки.
Известен синхронный электродвигатель [авторское свидетельство SU 1345291], содержащий ротор с явно выраженными полюсами чередующейся полярности, образованными постоянными магнитами, и статор с явно выраженными полюсами и трехфазной катушечной обмоткой, каждая катушка в которой охватывает один полюс (зубец) статора, а катушки, принадлежащие одной фазе, расположены на полюсах статора, сдвинутых друг относительно друга на 360 электрических градусов, при этом число полюсов ротора ZR связано с число полюсов статора ZS соотношением
ZR=ZS±K, где
ZS=3K;
K=1, 2, 3….
Указанный электродвигатель обладает улучшенными массогабаритными показателями и энергоэффективностью, а соответственно и несколько большим, чем в указанных выше известных вентильных (бесконтактных) синхронных электродвигателях, развиваемым и удельным вращающим моментом за счет сокращения объема и протяженности лобовых частей обмотки, а также за счет совпадения направления векторов МДС как от отдельных витков в катушках обмотки статора, так и от катушек в каждой фазе обмотки в целом.
Недостатками такого синхронного электродвигателя являются высокий уровень остаточного момента (пазового фиксирующего момента) – момента залипания (знакопеременного момента при обесточенных обмотках) вследствие повышенного взаимодействия магнитного потока постоянных магнитов явно выраженных полюсов ротора с явно выраженными полюсами (зубцами) статора, низкая синусоидальность распределения магнитной индукции в воздушном зазоре между статором и ротором и соответственно высокая несинусоидальность потокосцепления обмоток фаз статора с магнитным потоком постоянных магнитов ротора и соответственно наводимой при этом в них ЭДС, усугубляемая также сдвигом между катушками одной фазы на 360 электрических градусов, что в совокупности указанных недостатков приводит к существенным пульсациям и снижению развиваемого электродвигателем вращающего момента, уменьшению его удельного значения, а соответственно к существенно низкой равномерности вращения его ротора и ухудшению качества работы электродвигателя в целом.
Также известны однотипные синхронные электродвигатели с постоянными магнитами [авторское свидетельство SU 1481875; патент RU 2311715; патент RU 2047936; патент RU 67347], каждый из которых содержит ротор с явно выраженными полюсами чередующейся полярности, образованными постоянными магнитами, пазовый статор с явно выраженными полюсами (зубцами) и m-фазную катушечную обмотку статора, каждая катушка которой охватывает один полюс (зубец) статора, а число полюсов (зубцов) статора отличается от числа полюсов ротора на величину, не превосходящую число полюсов (зубцов) статора, приходящихся на одну фазу обмотки. При этом катушки, принадлежащие одной фазе, сгруппированы в катушечные группы, в пределах которых катушки соединены последовательно и расположены на полюсах (зубцах) статора, сдвинутых друг относительно друга на угол, не равный и не кратный 360 электрическим градусам.
Выполнение в указанных электродвигателях-аналогах сдвига между последовательно соединенными катушками в катушечной группе в каждой фазе не равным и не кратным 360 электрическим градусам позволяет несколько повысить синусоидальность функции потокосцепления этих катушечных групп и соответственно образованных ими фаз обмотки статора с магнитным потоком постоянных магнитов ротора и наводимой при этом в них ЭДС, что приводит к некоторому снижению пульсаций развиваемого электродвигателем вращающего момента и соответственно к некоторому повышению равномерности вращения его ротора, степень которых растет с увеличением числа катушек в катушечной группе. Вместе с тем достигается и снижение остаточного момента за счет уменьшения разницы между числом полюсов (зубцов) статора и полюсов ротора.
Однако, предложенное в указанных однотипных синхронных электродвигателях- аналогах выполнение сдвига между последовательно соединенными катушками в катушечной группе в каждой фазе, отличным от 360 электрических градусов, неизбежно приводит к снижению амплитуды основной (первой) гармонической составляющей функции потокосцепления обмоток фаз статора с магнитным потоком постоянных магнитов ротора и соответственно наводимой при этом в них ЭДС, степень которого также растет с увеличением числа катушек в катушечной группе. Это делает невозможным существенное снижение пульсаций развиваемого электромагнитного момента и соответственно невозможным существенное повышение равномерности вращения его ротора без значительного снижения самого развиваемого электродвигателем вращающего момента и его удельного значения. Также к недостаткам этих однотипных синхронных электродвигателей-аналогов следует отнести усложнение конструкции и технологии изготовления, поскольку существенное снижение пульсаций вращающего момента и повышение синусоидальности потокосцепления и ЭДС может достигаться только в основном за счет увеличения числа катушек в катушечных группах, что определяет необходимость увеличения числа полюсов (зубцов) и уменьшения размеров пазов статора, а соответственно и уменьшение объема размещаемых в них витков катушек.
Наиболее близкими аналогами по отношению к предлагаемому изобретению являются бесконтактные многополюсные электродвигатели с идентичными принципиальными техническими решениями, а именно электромеханический преобразователь вентильного электродвигателя [авторское свидетельство SU 1700704], многополюсный синхронный двигатель [патент RU 2779505] и бесконтактный (вентильный) электродвигатель [патент RU 2681302], последний из которых принят в качестве прототипа, содержащий ротор с явно выраженными полюсами числом 2р чередующейся полярности, образованными постоянными магнитами, закрепленными на нем, магнитомягкий пазовый статор с одинаковыми равномерно распределенными зубцами числом ZC, обращенными к полюсам ротора и отделенными от них воздушным зазором, и обмотку статора с числом фаз m равным трем, каждая фаза в которой образована k катушечными группами, состоящими из n последовательно-встречно соединенных катушек, охватывающих по одному зубцу статора и образующих явно выраженный полюс статора. В электродвигателе-прототипе число полюсов ротора 2р связано с числом зубцов статора ZС соотношением 2р=ZС±k при ZС=m⋅n⋅k.
Такой электродвигатель-прототип имеет лучшие показатели энергоэффективности по сравнению с другими аналогами.
Недостатками прототипа являются невысокий развиваемый и удельный вращающий момент, и низкая равномерность вращения его ротора из-за значительных пульсаций развиваемого им вращающего момента, что вызвано в прототипе наличием высших гармонических составляющих функций потокосцепления магнитного потока от постоянных магнитов явно выраженных полюсов ротора с обмотками фаз явно выраженных полюсов статора и соответственно наводимой в них ЭДС. Это является также и причиной наличия в прототипе значительного остаточного момента (пазового фиксирующего момента при обесточенных обмотках). Наличие пульсаций вращающего момента в прототипе предполагает пониженное значение амплитуды основной (первой) гармонической составляющей указанных функций потокосцепления и ЭДС, что приводит, как указано выше, к существенному снижению величины развиваемого им полезного и удельного вращающего момента. Указанные недостатки прототипа ухудшают качество его работы в целом.
Решаемой технической проблемой настоящего изобретения является устранение указанных недостатков прототипа путем создания бесконтактного моментного электродвигателя с повышенными равномерностью вращения ротора и вращающим моментом.
Технические результаты, достигаемые при осуществлении предлагаемого изобретения – бесконтактного моментного электродвигателя, состоят в существенном повышении равномерности вращения его ротора и вращающего момента путем понижения пульсаций развиваемого им вращающего и удельного момента за счет существенного снижении амплитуд высших гармонических составляющих в функции потокосцепления магнитного потока постоянных магнитов явно выраженных полюсов ротора с катушечными обмотками фаз статора, образующими явно выраженные полюса, снижения амплитуд высших гармонических составляющих функции наводимой в обмотках фаз ЭДС и остаточного момента.
Достижение указанных технических результатов в предлагаемом бесконтактном моментном электродвигателе обеспечивается существенными признаками, отдельными и в совокупности, заявляемого изобретения, обусловленными его принципиальными техническими решениями.
Для решения поставленной технической задачи и достижения указанных технических результатов, предлагаемый бесконтактный моментный электродвигатель, содержащий ротор с явно выраженными полюсами числом 2р чередующейся полярности, образованными постоянными магнитами, закрепленными на нем, магнитомягкий пазовый статор с одинаковыми равномерно распределенными зубцами числом ZC, обращенными к полюсам ротора и отделенными от них воздушным зазором, и обмотку статора с числом фаз m равным трем, каждая фаза в которой образована k катушечными группами, состоящими из n последовательно-встречно соединенных катушек, охватывающих по одному зубцу статора, число катушек n в катушечной группе выполнено большим единицы, а каждый зубец статора охвачен одинаковым числом катушек J, большим единицы и не превышающим n, при этом число полюсов ротора 2р связано с числом зубцов статора ZС соотношением
2р=ZС ± k/J при ZС=m⋅n⋅k/J,
а обмотка каждой фазы выполнена в виде наборов катушечных групп числом R, равным J, по k/R катушечных групп в каждом наборе так, что катушечные группы в пределах каждого набора распределены равномерно-симметрично по окружности статора и при n четном соединены между собой встречно, а при n нечетном – согласно, при этом наборы катушечных групп в каждой фазе соединены между собой последовательно-встречно и размещены на статоре так, что каждый из R наборов катушечных групп смещен относительно предыдущего по окружности статора на один зубец статора в одном и том же направлении.
Дополнительные особенности предлагаемого бесконтактного моментного электродвигателя заключаются в том, что:
- при k/R >1 катушечные группы каждого набора могут быть соединены между собой последовательно, или могут быть соединены между собой параллельно, а при k/R =4, 6, 8,… катушечные группы каждого набора могут быть соединены между собой последовательно-параллельно (смешано);
- фазы обмотки статора могут быть соединены в звезду или в треугольник;
- полюса ротора, выполненного из магнитомягкого материала, могут быть образованы радиально намагниченными постоянными магнитами и закреплены на его поверхности, обращенной к зубцам статора, или полюса ротора могут быть образованы тангенциально намагниченными постоянными магнитами, между которыми установлены магнитомягкие концентраторы, и закреплены на его поверхности, обращенной к зубцам статора, а ротор выполнен из немагнитного материала;
- статор и ротор могут быть выполнены каждый в виде полого цилиндра с зубцами на внутренней поверхности цилиндра статора и с полюсами на наружной поверхности цилиндра ротора, при этом статор расположен снаружи, а ротор - внутри, или статор и ротор могут быть выполнены каждый в виде полого цилиндра с зубцами на наружной поверхности цилиндра статора и с полюсами на внутренней поверхности цилиндра ротора, при этом ротор расположен снаружи, а статор - внутри.
Благодаря указанным выше техническим решениям предлагаемого бесконтактного моментного электродвигателя достигается существенное повышение синусоидальности функций потокосцепления магнитного потока постоянных магнитов явно выраженных полюсов ротора числом 2р, связанных с числом ZС, с обмотками фаз статора и наводимых в них ЭДС за счет образования фазовых сдвигов между векторами высших гармонических составляющих потокосцепления и наводимой ЭДС как в катушках отдельных катушечных групп, так и в наборах катушечных групп в пределах каждой фазы, что приводит к значительному снижению их амплитуд при суммировании в результате объединения (соединения) катушек в катушечные группы и наборов катушечных групп в фазы, причем величина образующихся указанных фазовых сдвигов, а, следовательно, и степень снижения амплитуд высших гармонических составляющих возрастают с увеличением номера гармонической составляющей. При этом обеспечивается существенное снижение остаточного момента за счет минимальной разницы между числом зубцов (полюсов) статора и числом полюсов ротора (вплоть до единицы), а, следовательно, и минимальной повторяемости по окружности одинаковых взаимных положений зубцов (полюсов) статора и полюсов ротора, приведенной к числу зубцов статора. В результате обеспечиваются существенное снижение пульсаций развиваемого предлагаемым бесконтактным моментным электродвигателем вращающего момента и соответственно благодаря этому высокая равномерность вращения его ротора в пределах оборота, повышение развиваемого и удельного вращающего момента.
Вместе с тем последовательно-встречное соединение наборов катушечных групп в каждой фазе обмотки статора обеспечивает совпадение направления протекания электрического тока и создаваемой им МДС в катушках, принадлежащих различным наборам катушечных групп, но охватывающие при этом один и тот же зубец статора, благодаря чему достигается увеличение основной (первой) гармонической составляющей функций потокосцепления и наводимой ЭДС со снижением относительных амплитуд их высших гармонических составляющих, что соответственно обеспечивает также, как указывалось выше, существенное повышение равномерности вращения ротора в предлагаемом бесконтактном моментном электродвигателе в пределах оборота, повышение развиваемого им вращающего момента, его удельного значения и энергоэффективности.
Сущность заявляемого изобретения, принципиальные технические решения предлагаемого бесконтактного моментного электродвигателя поясняются и проиллюстрированы фиг. 1 и фиг. 2.
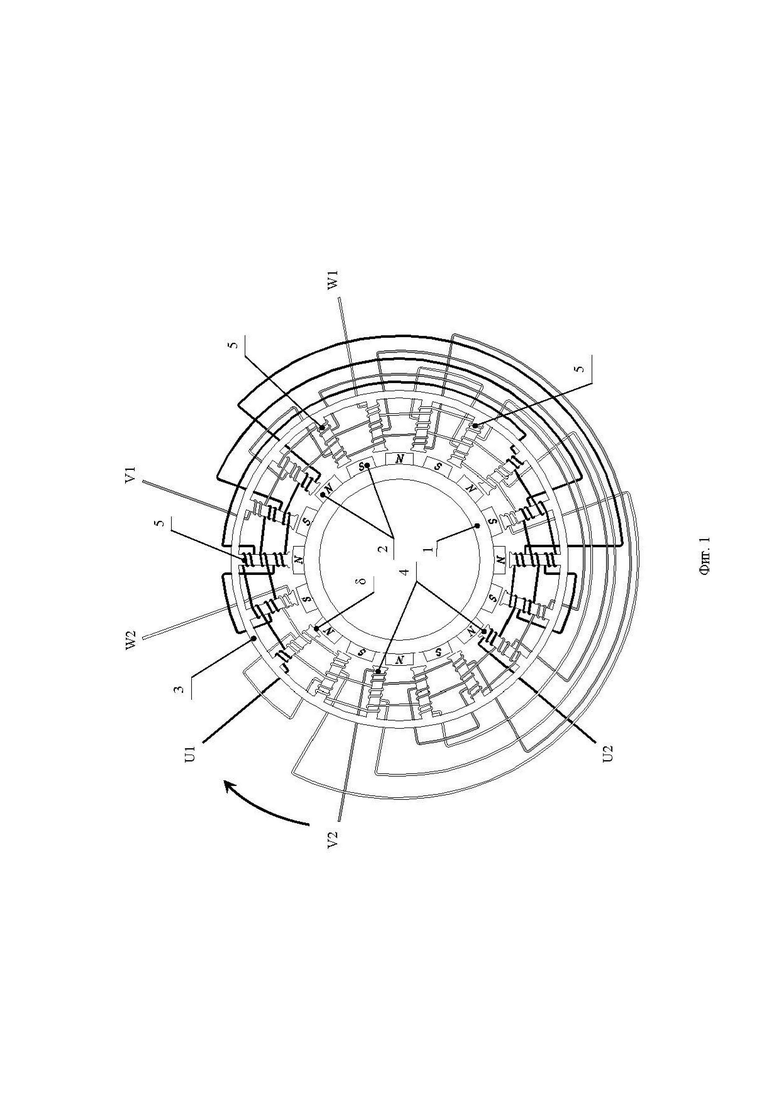
На фиг. 1 показан вариант выполнения бесконтактного моментного электродвигателя в соответствии с настоящим изобретением.
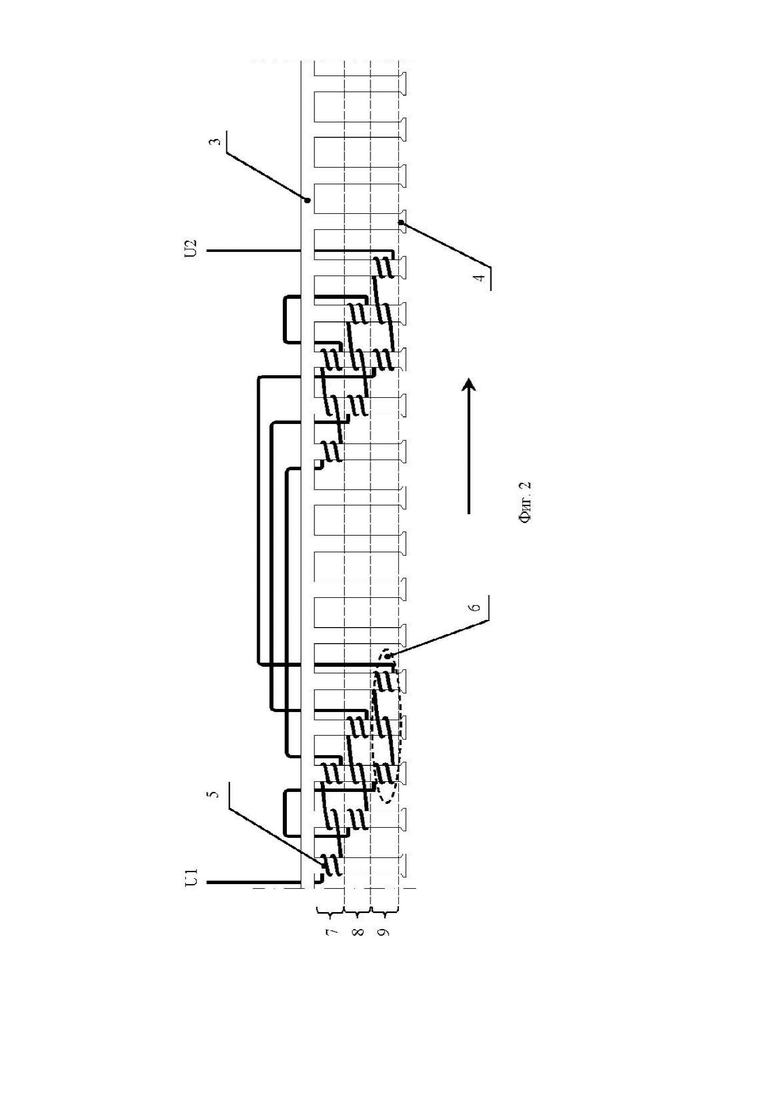
На фиг. 2 проиллюстрирована развернутая схема размещения одной фазы обмотки на статоре бесконтактного моментного электродвигателя, показанного на фиг. 1, в соответствии с настоящим изобретением.
На фиг. 1 и фиг. 2 приняты следующие обозначения:
1 – ротор из магнитомягкого материала;
2 – полюса ротора, каждый чередующейся полярности, образованные радиально намагниченными постоянными магнитами;
3 – статор с ярмом;
4 – зубец статора;
5 – катушки (катушка фазы U, катушка фазы V, катушка фазы W), общим числом J катушек на каждом зубце 4 статора 3;
δ – воздушный зазор между полюсами ротора 2 и зубцами статора 4;
6 – катушечная группа;
7 – первый набор катушечных групп в фазе;
8 – второй набор катушечных групп в фазе;
9 – третий набор катушечных групп в фазе;
N и S – полярности полюсов 2. Полярности N соответствует прохождение магнитного потока постоянного магнита через полюс 2 в направлении зубцов 4 статора 3 от ротора 1, а полярности S – в противоположном направлении;
U – первая фаза обмотки статора;
V – вторая фаза обмотки статора;
W – третья фаза обмотки статора;
U1 – начало фазы U обмотки статора;
U2 – конец фазы U обмотки статора;
V1 – начало фазы V обмотки статора;
V2 – конец фазы V обмотки статора;
W1 – начало фазы W обмотки статора;
W2 – конец фазы W обмотки статора.
Проиллюстрированный на фиг. 1 вариант выполнения бесконтактного моментного электродвигателя с развернутой схема размещения одной фазы обмотки его статора, приведенной на фиг. 2, в соответствии с предлагаемым изобретением содержит цилиндрический ротор 1, выполненный из магнитомягкого материала, с явно выраженными полюсами числом 2p чередующейся полярности, образованными радиально намагниченными постоянными магнитами 2, закрепленными на наружной поверхности полого цилиндра ротора 1; магнитомягкий цилиндрический пазовый статор с ярмом 3 и числом ZC одинаковых зубцов 4, равномерно распределенных на внутренней поверхности цилиндра статора, расположенного снаружи ротора 1, обращенных в сторону полюсов 2 ротора 1 и отделенных от них воздушным зазором δ, и обмотку статора с тремя (m=3) фазами U, V и W, каждая из которых образована катушечными группами 6 числом k=6, состоящими из n=3 (n>1) последовательно-встречно соединенных катушек 5, охватывающих по одному зубцу 4 статора 3, при этом каждый зубец 4 статора 3 охвачен тремя катушками – J=3 (1<J≤ n), как это показано на фиг. 1. Каждая фаза обмотки статора выполнена в виде R=J=3 наборов катушечных групп 7, 8 и 9 по k/R = 2 катушечные группы в каждом из наборов, при этом катушечные группы 6 в пределах каждого из наборов 7, 8 и 9 распределены равномерно-симметрично по окружности статора 3 и соединены между собой последовательно-согласно (n = 3 – нечетное), при этом наборы катушечных групп 7, 8 и 9 соединены между собой последовательно-встречно и размещены на статоре 3 так, что второй набор катушечных групп 8 смещен по окружности статора 3 относительно первого набора 7, а третий набор 9 смещен по окружности статора 3 относительно второго набора 8 – на один зубец статора 4 в одном и том же направлении – по часовой стрелке, как это показано на фиг. 1 и фиг. 2.
Число зубцов статора ZC определяется из приведенного в формуле изобретения соотношения ZС=m⋅n⋅k/J, а именно для проиллюстрированного на фиг. 1 и фиг. 2 варианта выполнения бесконтактного моментного электродвигателя и развернутой схемы размещения одной фазы обмотки – ZC=3⋅3⋅6/3=18, а число полюсов ротора определяется из приведенного в формуле изобретения соотношения 2р=ZС±k/J, также для проиллюстрированного на фиг. 1 варианта выполнения бесконтактного моментного электродвигателя, а именно 2p=18−(6/3)=16.
Работа предлагаемого бесконтактного моментного электродвигателя, вариант которого представлен на фиг. 1, осуществляется следующим образом.
Магнитные поля от постоянных магнитов, образующих полюса 2 ротора 1, создают магнитные потоки, которые сцепляются с катушками 5 обмотки статора 3, размещенными на зубцах 4 статора 3, проходя через воздушный зазор δ, зубцы 4 и ярмо статора 3 и далее через последующие зубцы 4 и воздушный зазор δ к полюсам 2 ротора 1 противоположной полярности (N − S), и замыкаются по магнитомягкому ротору 1. Совокупность магнитных полей от постоянных магнитов, образующих полюса 2 ротора 1, формирует магнитное поле ротора 1, являющееся относительно него неподвижным.
При обесточенных фазах U, V и W обмотки статора 3 силовые магнитные взаимодействия полюсов 2 ротора 1 (магнитного поля ротора 1) с зубцами 4 статора 3 практически полностью взаимно уравновешивают друг друга благодаря равномерному распределению зубцов 4 на статоре 3 и минимальной повторяемости по окружности одинаковых взаимных положений зубцов 4 и полюсов 2 ротора 1, приведенной к числу зубцов 4 статора 3, обеспечивая существенное снижение момента залипания – остаточного момента.
При питании фаз U, V и W обмотки статора симметричной трехфазной системой электрических токов, протекающие в катушках 5 токи создают магнитные поля, которые при наложении друг на друга формируют круговое вращающееся магнитное поле статора 3. Взаимодействие кругового вращающего магнитного поля статора 3 с неподвижным магнитным полем ротора 1 приводит к образованию электромагнитного вращающего момента между ротором 1 и статором 3 электродвигателя. Указанный вращающий момент пропорционален по величине синусу угла между вектором МДС кругового вращающегося магнитного поля статора 3 и вектором МДС магнитного поля ротора 1 и направлен в сторону их совмещения. Под действием электромагнитного вращающего момента ротор 1 устремляется за вращающимся круговым магнитным полем статора 3, в результате чего создается непрерывное вращение ротора электродвигателя.
Наиболее эффективная работа электродвигателя обеспечивается при формировании симметричной трехфазной системы электрических токов в фазах U, V и W обмотки статора с использованием датчика обратной связи по угловому положению ротора так, чтобы в каждый момент времени вектор МДС кругового вращающегося магнитного поля статора опережал вектор МДС магнитного поля ротора на угол равный 90 электрическим градусам. Благодаря этому достигается наибольшее значение электромагнитного вращающего момента между ротором и статором в каждый момент времени.
На фиг.1 представлено статическое взаимное положение ротора 1 относительно статора 3 в фиксированный момент времени, при котором для обеспечения угла 90 электрических градусов между вектором МДС кругового вращающегося магнитного поля статора 3 и вектором МДС магнитного поля ротора 1, а, следовательно, достижения и наибольшего вращающего момента в направлении, указанном на фиг.1, симметричная трехфазная система электрических токов, питающих фазы U, V и W обмотки статора 3, должна быть сформирована так, чтобы фаза U была обесточена, а в фазах V и W протекали электрические токи равной величины, причем в фазе V в направлении от конца V2 к началу V1, а в фазе W – от начала W1 к концу W2.
Согласно проведенным расчетам вариантов предлагаемого бесконтактного моментного электродвигателя и сопоставления их результатов с результатами проведенного верификационного численного компьютерного моделирования магнитного поля и наводимой в обмотках фаз ЭДС, создаваемого вращающего момента, его пульсаций и неравномерности вращения ротора в функции его углового перемещения методом конечно-элементного анализа в программном комплексе Ansys Maxwell, определено, что по сравнению с прототипом в предлагаемом бесконтактном моментном электродвигателе равномерность вращения его ротора повышена более чем в три раза за счет существенного снижения пульсаций создаваемого вращающего момента благодаря многократному уменьшению амплитуд высших гармонических составляющих в функции потокосцепления магнитного потока постоянных магнитов полюсов ротора с катушечными обмотками фаз статора и амплитуд высших гармонических составляющих функции наводимой в обмотках фаз ЭДС, при этом соответственно развиваемый и удельный вращающий момент повышены, а остаточный момент снижен не менее чем в 1,5 раза при пониженном тепловыделении.
В настоящее время разработана конструкторская и технологическая документация для производства предлагаемого бесконтактного моментного электродвигателя.
Термины, определения понятий и обозначения в заявляемом изобретении приведены в соответствии с ГОСТ 27471-87, ГОСТ Р 52002–2003, ГОСТ 26772–85.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1986 |
|
RU2047936C1 |
| ТОРЦЕВАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2007 |
|
RU2337458C1 |
| Многополюсный синхронный электродвигатель | 2021 |
|
RU2779505C1 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2004 |
|
RU2280936C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2339147C1 |
| Вентильный электродвигатель с встроенными датчиками углового положения ротора | 2018 |
|
RU2681302C1 |
| РЕАКТИВНЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1994 |
|
RU2072611C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2012 |
|
RU2518906C2 |
| МНОГОФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2559197C2 |
Изобретение относится к электротехнике, а именно к бесконтактным многополюсным синхронным моментным электродвигателям с постоянными магнитами для высокоточных управляемых электроприводов. Технический результат заключается в снижении пульсаций развиваемого бесконтактным моментным электродвигателем момента, повышении равномерности вращения его ротора в пределах оборота, повышении удельного вращающего момента и энергоэффективности. Бесконтактный моментный электродвигатель содержит ротор с явно выраженными полюсами числом 2р чередующейся полярности, образованными закрепленными на нем постоянными магнитами, магнитомягкий пазовый статор с одинаковыми равномерно распределенными зубцами числом ZC, обращенными к полюсам ротора, и обмотку статора с числом фаз m, равным трем, каждая фаза в которой образована k катушечными группами, состоящими из n последовательно-встречно соединенных катушек, охватывающих по одному зубцу статора. Число катушек n в катушечной группе выполнено большим единицы, а каждый зубец статора охвачен одинаковым числом катушек N, большим единицы и не превышающим n, при этом число полюсов ротора 2р связано с числом зубцов статора ZС соотношением 2р=ZС±k/N при ZС=m⋅n⋅k/N. Обмотка каждой фазы выполнена в виде наборов катушечных групп числом R, равным N, по k/R катушечных групп в каждом наборе так, что катушечные группы в пределах каждого набора распределены равномерно по окружности статора и при n четном соединены между собой встречно, а при n нечетном – согласно, при этом наборы катушечных групп в каждой фазе соединены между собой последовательно-встречно и размещены на статоре так, что каждый из R наборов катушечных групп смещен относительно предыдущего по окружности статора на один зубец статора в одном и том же направлении. 9 з.п. ф-лы, 2 ил.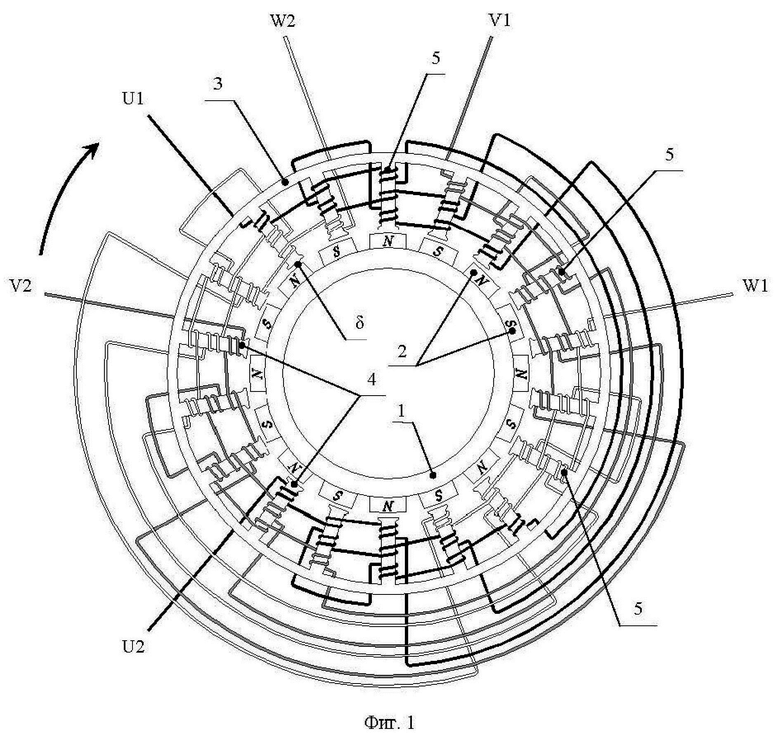
1. Бесконтактный моментный электродвигатель, содержащий ротор с явно выраженными полюсами числом 2р чередующейся полярности, образованными постоянными магнитами, закрепленными на нем, магнитомягкий пазовый статор с одинаковыми равномерно распределенными зубцами числом ZC, обращенными к полюсам ротора и отделенными от них воздушным зазором, и обмотку статора с числом фаз m, равным трем, каждая фаза в которой образована k катушечными группами, состоящими из n последовательно-встречно соединенных катушек, охватывающих по одному зубцу статора, отличающийся тем, что число катушек n в катушечной группе выполнено большим единицы, а каждый зубец статора охвачен одинаковым числом катушек J, большим единицы и не превышающим n, при этом число полюсов ротора 2р связано с числом зубцов статора ZС соотношением 2р=ZС±k/J при ZС=m⋅n⋅k/J, а обмотка каждой фазы выполнена в виде наборов катушечных групп числом R, равным J, по k/R катушечных групп в каждом наборе так, что катушечные группы в пределах каждого набора распределены равномерно по окружности статора и при n четном соединены между собой встречно, а при n нечетном – согласно, при этом наборы катушечных групп в каждой фазе соединены между собой последовательно-встречно и размещены на статоре так, что каждый из R наборов катушечных групп смещен относительно предыдущего по окружности статора на один зубец статора в одном и том же направлении.
2. Бесконтактный моментный электродвигатель по п. 1, отличающийся тем, что при k/R >1 катушечные группы каждого набора соединены между собой последовательно.
3. Бесконтактный моментный электродвигатель по п. 1, отличающийся тем, что при k/R >1 катушечные группы каждого набора соединены между собой параллельно.
4. Бесконтактный моментный электродвигатель по п. 1, отличающийся тем, что при k/R = 4, 6, 8, … катушечные группы каждого набора соединены между собой последовательно-параллельно (смешано).
5. Бесконтактный моментный электродвигатель по любому из пп. 1-4, отличающийся тем, что фазы обмотки статора соединены в звезду.
6. Бесконтактный моментный электродвигатель по любому из пп. 1-4, отличающийся тем, что фазы обмотки статора соединены в треугольник.
7. Бесконтактный моментный электродвигатель по любому из пп. 1-6, отличающийся тем, что полюса ротора, выполненного из магнитомягкого материала, образованы радиально намагниченными постоянными магнитами и закреплены на его поверхности, обращенной к зубцам статора.
8. Бесконтактный моментный электродвигатель по любому из пп. 1-6, отличающийся тем, что полюса ротора образованы тангенциально намагниченными постоянными магнитами, между которыми установлены магнитомягкие концентраторы, и закреплены на его поверхности, обращенной к зубцам статора, а ротор выполнен из немагнитного материала.
9. Бесконтактный моментный электродвигатель по любому из пп. 1-8, отличающийся тем, что статор и ротор выполнены каждый в виде полого цилиндра с зубцами на внутренней поверхности цилиндра статора и с полюсами на наружной поверхности цилиндра ротора, при этом статор расположен снаружи, а ротор - внутри.
10. Бесконтактный моментный электродвигатель по любому из пп. 1-8, отличающийся тем, что статор и ротор выполнены каждый в виде полого цилиндра с зубцами на наружной поверхности цилиндра статора и с полюсами на внутренней поверхности цилиндра ротора, при этом ротор расположен снаружи, а статор - внутри.
| Вентильный электродвигатель с встроенными датчиками углового положения ротора | 2018 |
|
RU2681302C1 |
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| Многополюсный синхронный электродвигатель | 2021 |
|
RU2779505C1 |
| МНОГОФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2559197C2 |
| WO 2013166919 A1, 14.11.2013. | |||

