ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее раскрытие относится к области техники электрических зубных щеток и более конкретно к способу управления двигателем для электрической зубной щетки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ
[0002] Вибрирующие электрические зубные щетки широко признаны и любимы на рынке благодаря своим преимуществам, таким как меньший износ зубов и меньшая вероятность повреждения десен. Вибрирующая электрическая зубная щетка оснащена вибрационным двигателем для создания высокочастотной вибрации головки щетки перпендикулярно длине ручки щетки, чтобы эффективно чистить зубы.
[0003] Текущая вибрирующая электрическая зубная щетка может реализовать только высокочастотную возвратно-поступательную вибрацию и не может имитировать большие возвратно-поступательные колебания человеческой руки вокруг оси вала двигателя. Поэтому она не может эффективно и всесторонне очищать полость рта при неправильном использовании. Кроме того, из-за различных пользователей или различных очищаемых частей рта, головка щетки колеблется по-разному вокруг оси вала двигателя. То есть текущая вибрирующая электрическая зубная щетка не может удовлетворить потребности различных пользователей в очистке различных частей, что приводит к плохому пользовательскому опыту.
[0004] Приведенное выше предназначено только для содействия в понимании технического решения настоящего раскрытия и не означает, что приведенное выше признается уровнем техники.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0005] В свете вышеуказанных проблем, настоящее раскрытие предлагает способ управления двигателем для электрической зубной щетки, направленный на решение технической проблемы неэффективного и неполного очищения полости рта, а также неудовлетворения потребностей различных пользователей в очистке различных частей полости рта.
[0006] Для достижения вышеуказанной цели предлагаемый способ управления двигателем включает: получение стартового или регулирующего сигнала; управление валом двигателя электрической зубной щетки для вибрации с заданной частотой относительно заданной осевой линии колебания в соответствии со стартовым или регулирующим сигналом; получение параметра положения заданной осевой линии колебания вала двигателя электрической зубной щетки; и управление заданной осевой линией колебания вала двигателя электрической зубной щетки для перемещения вокруг оси вала двигателя по заданной траектории.
[0007] В некоторых вариантах осуществления, получение параметра положения заданной осевой линии колебания вала двигателя электрической зубной щетки включает: получение параметра максимального положения вибрации вала двигателя электрической зубной щетки в прямом и обратном направлениях вокруг оси через датчик Холла в соответствии со стартовым или регулирующим сигналом, и определение параметра положения заданной осевой линии колебания электрической зубной щетки в соответствии с параметром максимального положения вибрации в прямом и обратном направлениях.
[0008] В некоторых вариантах осуществления, управление заданной осевой линией колебания вала двигателя электрической зубной щетки для перемещения вокруг оси вала двигателя по заданной траектории включает: в режиме колебания, управление заданной осевой линией колебания электрической зубной щетки для колебания на заданный угол вокруг оси вала двигателя в прямом и обратном направлениях; при этом заданный угол составляет не менее 10 градусов и не более 60 градусов; и/или в режиме вращения, управление заданной осевой линией колебания электрической зубной щетки для вращения на 360 градусов вокруг оси вала двигателя.
[0009] В некоторых вариантах осуществления, управление заданной осевой линией колебания вала двигателя электрической зубной щетки для перемещения вокруг оси вала двигателя по заданной траектории включает: управление заданной осевой линией колебания вала двигателя электрической зубной щетки для колебания вокруг оси вала двигателя в прямом и обратном направлениях с заданной частотой; при этом соотношение заданной частоты вибрации вала двигателя к заданной частоте колебания заданной осевой линии вала двигателя в прямом и обратном направлениях вокруг оси вала двигателя составляет не менее 60.
[0010] В некоторых вариантах осуществления, управление валом двигателя электрической зубной щетки для вибрации с заданной частотой относительно заданной осевой линии колебания в соответствии со стартовым или регулирующим сигналом включает: управление валом двигателя электрической зубной щетки для вибрации с заданной частотой вибрации и заданным углом вибрации относительно заданной осевой линии колебания с помощью управления вектором магнитного поля (Field Oriented Control, FOC); при этом управление заданной осевой линией колебания вала двигателя электрической зубной щетки для перемещения вокруг оси вала двигателя по заданной траектории включает: управление заданной осевой линией колебания вала двигателя электрической зубной щетки для вращения вокруг оси вала двигателя с заданным углом колебания и заданной скоростью колебания с помощью FOC.
[0011] В некоторых вариантах осуществления, до получения стартового или регулирующего сигнала, способ дополнительно включает: Прием сигнала подготовки калибровки двигателя, управление валом двигателя для прекращения вибрации и снятие контроля с двигателя посредством клавиши, так, чтобы вал двигателя мог вращаться вокруг оси под действием внешней силы; отправку сигнала начала калибровки двигателя в ответ на вращение вала двигателя до тех пор, пока заданная осевая линия колебания не совпадет с вертикальной осевой линией клавиши электрической зубной щетки в радиальном направлении вала двигателя; прием сигнала начала калибровки двигателя; получение текущего положения заданной осевой линии колебания вала двигателя электрической зубной щетки согласно сигналу начала калибровки двигателя и определение текущего положения заданной осевой линии колебания вала как заданного начального положения; и прием сигнала калибровки головки щетки; и управление заданной осевой линией колебания вала двигателя электрической зубной щетки для вращения к заданному начальному положению в соответствии с сигналом калибровки головки щетки.
[0012] В некоторых вариантах осуществления, управление заданной осевой линией колебания вала двигателя электрической зубной щетки для перемещения вокруг оси вала двигателя по заданной траектории включает: Прием сигнала очистки передних зубов или сигнала очистки задних зубов; и управление заданной осевой линией колебания электрической зубной щетки для колебания вокруг оси вала двигателя в прямом и обратном направлениях с частотой колебания, соответствующей сигналу очистки передних зубов или сигналу очистки задних зубов.
[0013] В некоторых вариантах осуществления, после получения параметра положения заданной осевой линии колебания вала двигателя электрической зубной щетки и до приема сигнала очистки передних зубов или сигнала очистки задних зубов; и управления заданной осевой линией колебания электрической зубной щетки для колебания вокруг оси вала двигателя в прямом и обратном направлениях с частотой колебания, соответствующей сигналу очистки передних зубов или сигналу очистки задних зубов, способ управления двигателем дополнительно включает: определение текущего параметра ширины зуба, соответствующего головке щетки электрической зубной щетки, распознавание типа зуба на основе текущего параметра ширины зуба и отправку сигнала очистки передних зубов или сигнала очистки задних зубов в соответствии с типом зуба.
[0014] Настоящее раскрытие также предоставляет устройство управления двигателем для электрической зубной щетки, включающее: первый модуль получения, предназначенный для получения стартового или регулирующего сигнала; первый модуль управления, предназначенный для управления валом двигателя электрической зубной щетки для вибрации с заданной частотой относительно заданной осевой линии колебания в соответствии со стартовым или регулирующим сигналом; второй модуль получения, предназначенный для получения параметра положения заданной осевой линии колебания вала двигателя электрической зубной щетки; и второй модуль управления, предназначенный для управления заданной осевой линией колебания вала двигателя электрической зубной щетки для перемещения вокруг оси вала двигателя по заданной траектории.
[0015] В некоторых вариантах осуществления, устройство управления двигателем дополнительно включает: датчик Холла, предназначенный для получения параметра максимального положения вибрации в прямом и обратном направлениях вала двигателя электрической зубной щетки вокруг оси в соответствии со стартовым или регулирующим сигналом, и определения параметра положения заданной осевой линии колебания электрической зубной щетки в соответствии с параметром максимального положения вибрации в прямом и обратном направлениях.
[0016] В некоторых вариантах осуществления, второй модуль управления предназначен для управления заданной осевой линией колебания электрической зубной щетки в режиме колебания с заданным углом вокруг оси вала двигателя в прямом и обратном направлениях, при этом заданный угол составляет не менее 10 градусов и не более 60 градусов; и/или второй модуль управления предназначен для управления заданной осевой линией колебания электрической зубной щетки в режиме вращения с поворотом на 360 градусов вокруг оси вала двигателя.
[0017] В некоторых вариантах осуществления, второй модуль управления предназначен для управления заданной осевой линией колебания вала двигателя электрической зубной щетки для колебания вокруг оси вала двигателя в прямом и обратном направлениях с заданной частотой; соотношение заданной частоты вибрации вала двигателя к заданной частоте колебания заданной осевой линии вала двигателя в прямом и обратном направлениях вокруг оси вала двигателя составляет не менее 60.
[0018] В некоторых вариантах осуществления, первый модуль управления предназначен для управления валом двигателя электрической зубной щетки для вибрации с заданной частотой вибрации и заданным углом вибрации относительно заданной осевой линии колебания через управление вектором магнитного поля (Field Oriented Control, FOC); второй модуль управления предназначен для управления заданной осевой линией колебания вала двигателя электрической зубной щетки для вращения вокруг оси вала двигателя с заданным углом колебания и заданной скоростью колебания через FOC.
[0019] В некоторых вариантах осуществления, устройство управления двигателем дополнительно включает: третий модуль получения, предназначенный для приема сигнала подготовки калибровки двигателя; третий модуль управления, предназначенный для управления валом двигателя для прекращения вибрации и снятия контроля с двигателя посредством клавиши, так чтобы вал двигателя мог вращаться вокруг оси под действием внешней силы; и отправку сигнала начала калибровки двигателя в ответ на вращение вала двигателя до тех пор, пока заданная осевая линия колебания не совпадет с вертикальной осевой линией клавиши электрической зубной щетки в радиальном направлении вала двигателя; четвертый модуль получения, предназначенный для приема сигнала начала калибровки двигателя; четвертый модуль управления, предназначенный для получения текущего положения заданной осевой линии колебания вала двигателя электрической зубной щетки согласно сигналу начала калибровки двигателя и определения текущего положения заданной осевой линии колебания вала как заданного начального положения; пятый модуль получения, предназначенный для приема сигнала калибровки головки щетки; и пятый модуль управления, предназначенный для управления заданной осевой линией колебания вала двигателя электрической зубной щетки для вращения к заданному начальному положению в соответствии с сигналом калибровки головки щетки.
[0020] В некоторых вариантах осуществления, устройство управления двигателем дополнительно включает: шестой модуль получения, предназначенный для приема сигнала очистки передних зубов или сигнала очистки задних зубов; и шестой модуль управления, предназначенный для управления заданной осевой линией колебания электрической зубной щетки для колебания вокруг оси вала двигателя в прямом и обратном направлениях с частотой колебания, соответствующей сигналу очистки передних зубов или сигналу очистки задних зубов.
[0021] В некоторых вариантах осуществления, устройство управления двигателем дополнительно включает: модуль получения, предназначенный для определения текущего параметра ширины зуба, соответствующего головке щетки электрической зубной щетки; и модуль распознавания, предназначенный для распознавания типа зуба на основе текущего параметра ширины зуба и отправки сигнала очистки передних зубов или сигнала очистки задних зубов в соответствии с типом зуба.
[0022] Настоящее раскрытие также предоставляет электрическую зубную щетку, включающую: двигатель, память, процессор и программу, хранящуюся в памяти; при этом процессор настроен на выполнение программы для осуществления способа управления двигателем, как указано выше.
[0023] Настоящее раскрытие также предоставляет систему управления, включающую вышеупомянутую электрическую зубную щетку и мобильный управляющий модуль, беспроводно подключенный к электрической зубной щетке; при этом мобильный управляющий модуль включает приложение для взаимодействия с электрической зубной щеткой и мобильный терминал для поддержки работы приложения; приложение предоставляет интерфейс для получения внешнего управления и настроено для генерации команды управления двигателем на основе внешнего управления и отправки команды управления двигателем на электрическую зубную щетку; электрическая зубная щетка настроена для получения команды управления двигателем и управления работой двигателя.
[0024] В некоторых вариантах осуществления, электрическая зубная щетка подключена к мобильному управляющему модулю через модуль беспроводной связи для вывода параметра работы двигателя; приложение настроено для вывода команды управления двигателем на основе внешнего управления для изменения параметра работы двигателя, и электрическая зубная щетка настроена для получения команды управления двигателем и работы в соответствии с измененным параметром работы двигателя.
[0025] В некоторых вариантах осуществления, параметр работы двигателя включает: частоту вибрации, с которой вал двигателя электрической зубной щетки вибрирует вокруг оси относительно заданной осевой линии колебания, скорость колебания, с которой заданная осевая линия колебания вала двигателя электрической зубной щетки перемещается вокруг оси вала двигателя по заданной траектории, и угол, под которым заданная осевая линия колебания электрической зубной щетки вращается вокруг оси вала двигателя.
[0026] Настоящее раскрытие также предоставляет плату управления для электрической зубной щетки, включающую: модуль переключения, настроенный для вывода сигнала переключения; модуль регулировки, настроенный для вывода сигнала регулировки параметров двигателя; датчик Холла, настроенный для определения параметра положения заданной осевой линии колебания вала двигателя электрической зубной щетки; и контроллер; при этом входной конец контроллера электрически подключен к модулю переключения и модулю регулировки, а выходной конец контроллера электрически подключен к двигателю электрической зубной щетки; при этом контроллер настроен для получения стартового или регулирующего сигнала и управления валом двигателя электрической зубной щетки для вибрации с заданной частотой относительно заданной осевой линии колебания в соответствии со стартовым или регулирующим сигналом; контроллер также настроен для управления заданной осевой линией колебания вала двигателя электрической зубной щетки для перемещения вокруг оси вала двигателя по заданной траектории.
[0027] Настоящее раскрытие также предоставляет нематериальный компьютерно-читаемый носитель, настроенный для хранения программы управления двигателем для электрической зубной щетки; при этом программа управления двигателем исполняема процессором для осуществления способа управления двигателем, как указано выше.
[0028] Настоящее раскрытие предоставляет способ управления двигателем для электрической зубной щетки, устройство, электрическую зубную щетку, систему управления электрической зубной щеткой, плату управления для электрической зубной щетки и читаемый носитель. В способе управления двигателем вал двигателя электрической зубной щетки управляется для вибрации с заданной частотой относительно заданной осевой линии колебания; и после получения параметра положения заданной осевой линии колебания вала двигателя электрической зубной щетки, двигатель электрической зубной щетки управляется для перемещения по заданной траектории вокруг оси вала двигателя. Пользователь может задать траекторию движения заданной осевой линии колебания электрической зубной щетки в соответствии с различными частями рта, которые необходимо очистить, и различными потребностями, чтобы реализовать различные углы колебания и режимы колебания вала двигателя электрической зубной щетки вокруг его оси, чтобы лучше имитировать ручную чистку зубов. Вместе с высокочастотной вибрацией головки щетки может быть обеспечена эффективная и всесторонняя очистка полости рта, удовлетворяя потребности различных пользователей в чистке различных частей полости рта.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0029] Для более четкой иллюстрации технических решений вариантов осуществления настоящего раскрытия ниже кратко описаны сопровождающие чертежи вариантов осуществления, и будет очевидно, что сопровождающие чертежи в следующем описании относятся только к некоторым вариантам осуществления настоящего раскрытия, а другие чертежи могут быть получены из этих чертежей специалистами в данной области без творческого труда.
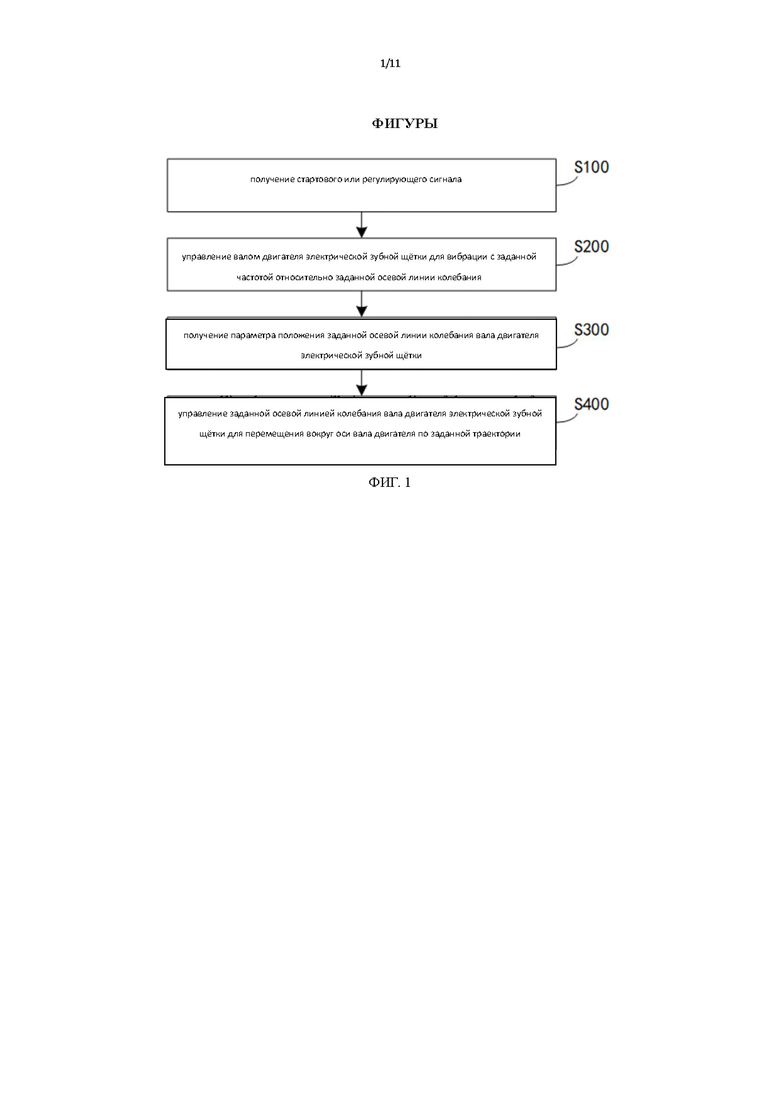
[0030] ФИГ. 1 представляет собой блок-схему способа управления двигателем для электрической зубной щетки согласно первому варианту осуществления настоящего раскрытия.
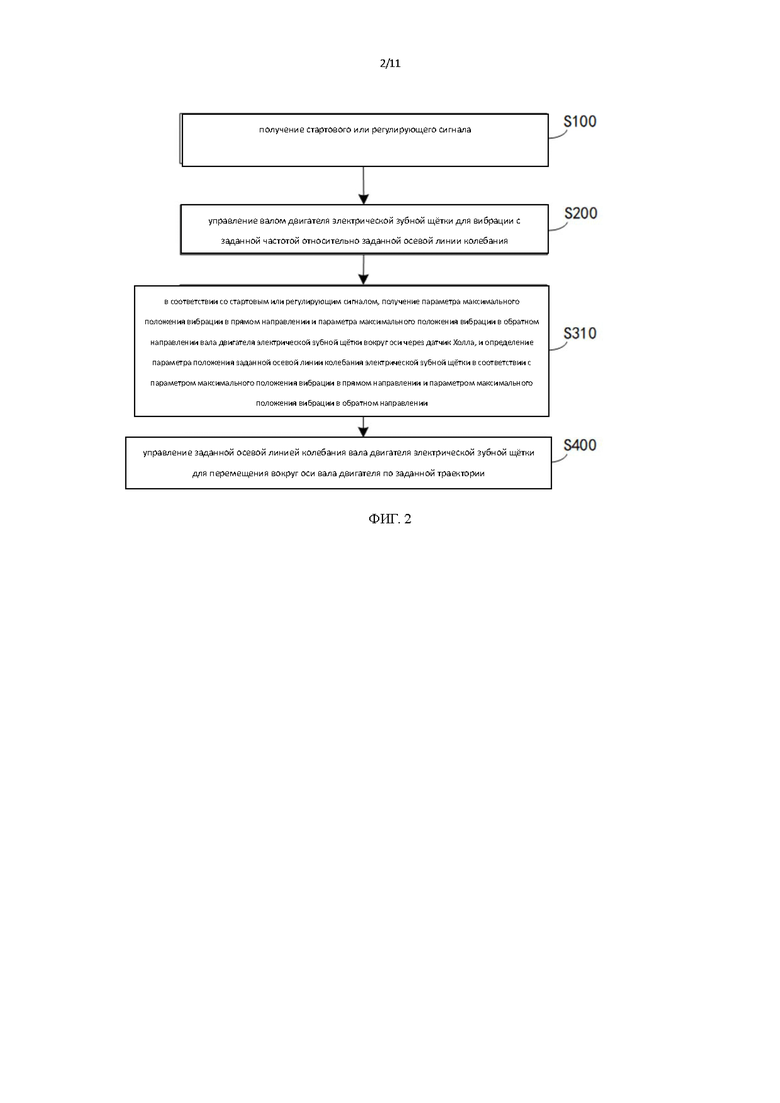
[0031] ФИГ. 2 представляет собой блок-схему способа управления двигателем для электрической зубной щетки согласно второму варианту осуществления настоящего раскрытия.
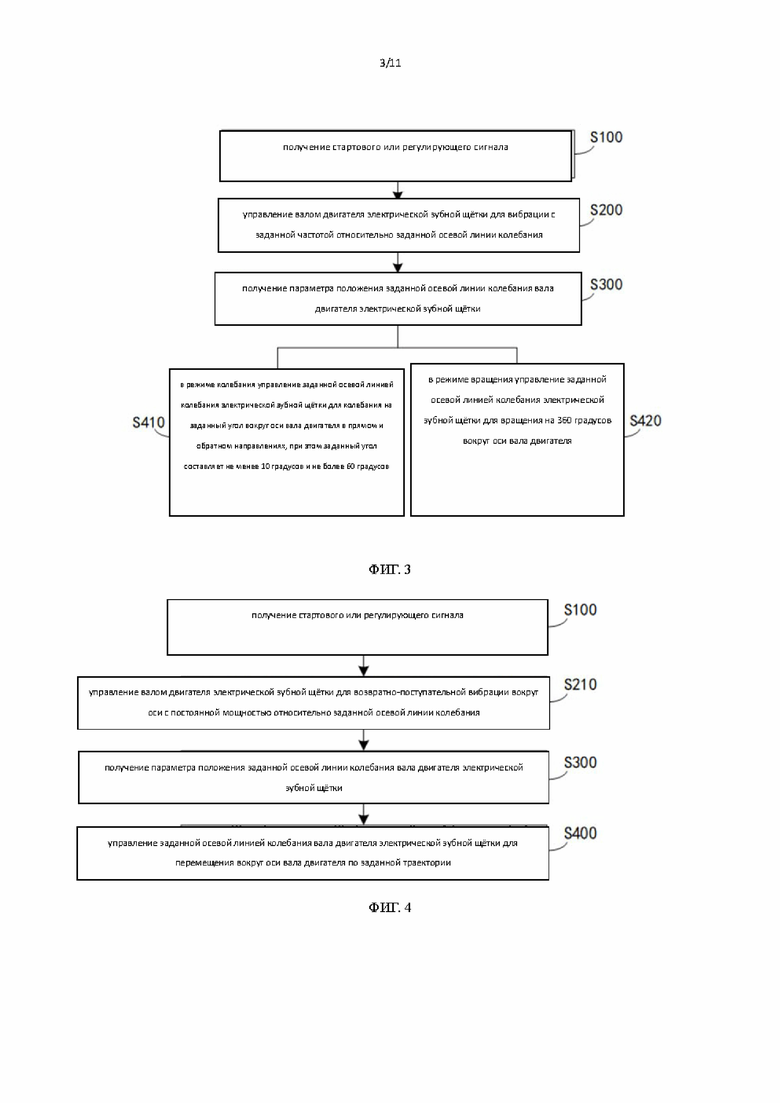
[0032] ФИГ. 3 представляет собой блок-схему способа управления двигателем для электрической зубной щетки согласно третьему варианту осуществления настоящего раскрытия.
[0033] ФИГ. 4 представляет собой блок-схему способа управления двигателем для электрической зубной щетки согласно четвертому варианту осуществления настоящего раскрытия.
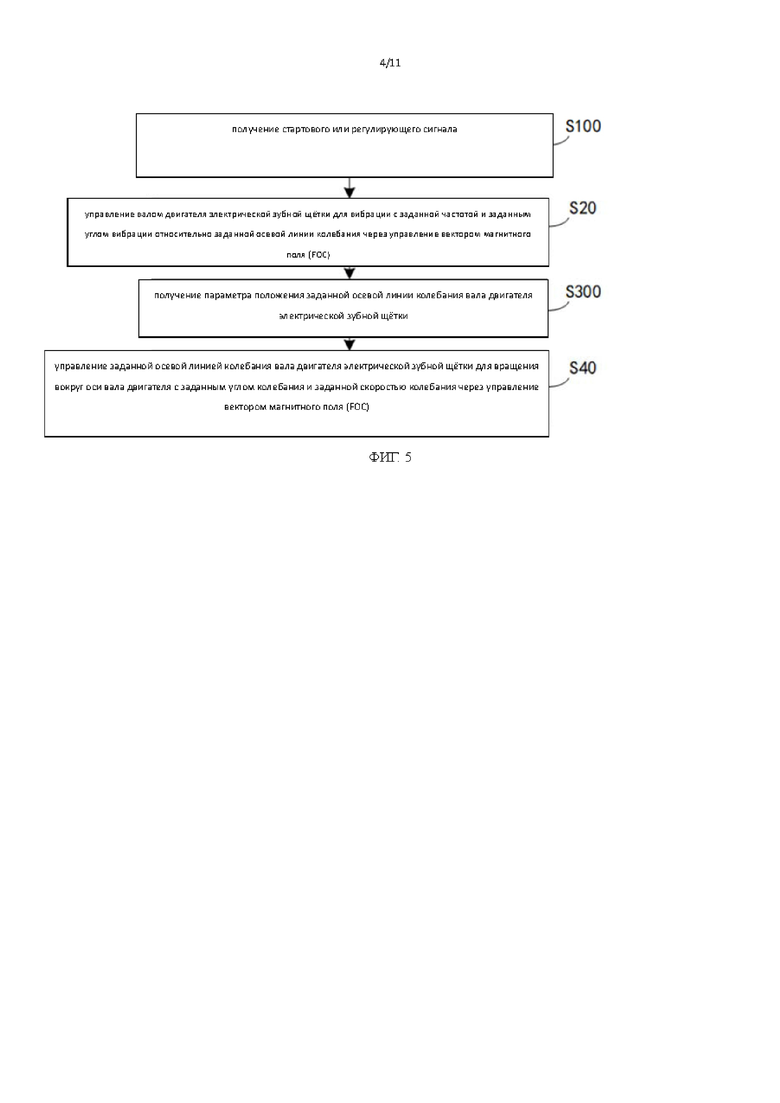
[0034] ФИГ. 5 представляет собой блок-схему способа управления двигателем для электрической зубной щетки согласно пятому варианту осуществления настоящего раскрытия.
[0035] ФИГ. 6 представляет собой блок-схему способа управления двигателем для электрической зубной щетки согласно шестому варианту осуществления настоящего раскрытия.
[0036] ФИГ. 7 представляет собой блок-схему способа управления двигателем для электрической зубной щетки согласно седьмому варианту осуществления настоящего раскрытия.
[0037] ФИГ. 8 представляет собой блок-схему способа управления двигателем для электрической зубной щетки согласно восьмому варианту осуществления настоящего раскрытия.
[0038] ФИГ. 9 представляет собой схематическое блочное изображение устройства управления для электрической зубной щетки согласно некоторым вариантам осуществления настоящего раскрытия.
[0039] ФИГ. 10 представляет собой схематическое блочное изображение устройства управления для электрической зубной щетки согласно другим вариантам осуществления настоящего раскрытия.
[0040] ФИГ. 11 представляет собой схематическое изображение модулей электрической зубной щетки согласно некоторым вариантам осуществления настоящего раскрытия.
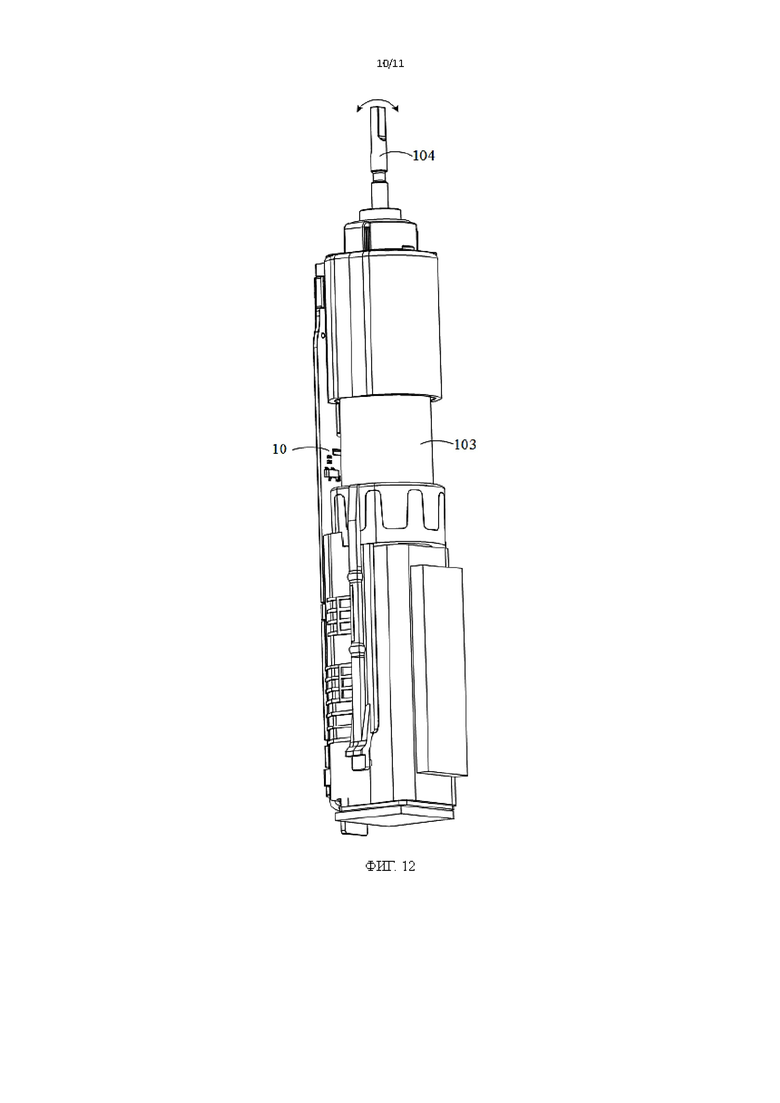
[0041] ФИГ. 12 представляет собой структурную схему электрической зубной щетки согласно некоторым вариантам осуществления настоящего раскрытия.
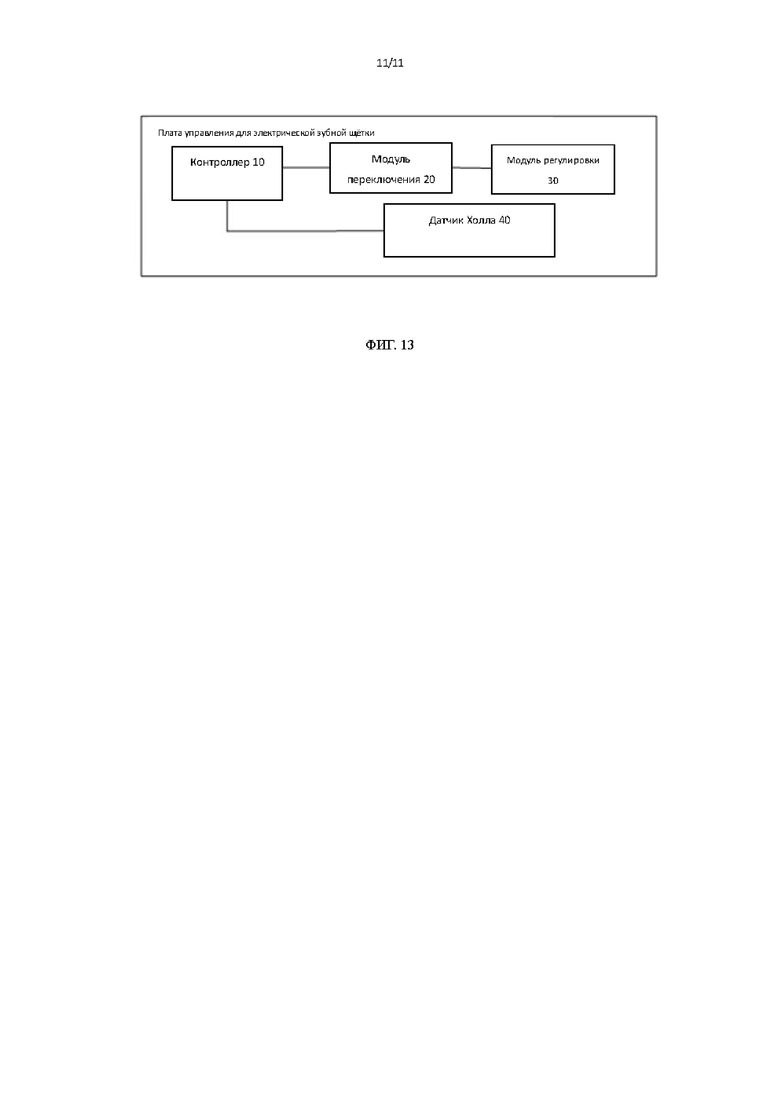
[0042] ФИГ. 13 представляет собой схематическое блочное изображение платы управления для электрической зубной щетки согласно некоторым вариантам осуществления настоящего раскрытия.
[0043] Реализация цели, функциональных особенностей и преимуществ настоящего раскрытия будет далее описана в сочетании с вариантами осуществления и со ссылкой на сопровождающие чертежи.
ПОДРОБНОЕ ОПИСАНИЕ
[0044] Технические решения в вариантах осуществления настоящего раскрытия будут описаны ясно и полностью ниже в сочетании с сопровождающими чертежами в вариантах осуществления настоящего раскрытия, и очевидно, что описанные варианты осуществления являются лишь частью вариантов осуществления настоящего раскрытия, а не всеми вариантами. На основе вариантов осуществления настоящего раскрытия все остальные варианты, полученные специалистами в данной области без творческого труда, подпадают под объем настоящего раскрытия. Кроме того, технические решения между различными вариантами осуществления могут быть комбинированы друг с другом, но это должно основываться на способности специалистов в данной области их реализовать. Когда комбинация технических решений оказывается противоречивой или недостижимой, следует считать, что такая комбинация технических решений не существует и не включена в объем, заявленный в настоящем раскрытии.
[0045] Следует отметить, что когда в вариантах осуществления настоящего раскрытия используются указания направления (такие как вверх, вниз, влево, вправо, вперед, назад и т.д.), указания направления предназначены только для объяснения относительного пространственного положения, движения и т.д. между различными компонентами в конкретном положении. Когда конкретное положение изменяется, указания направления также изменяются соответствующим образом.
[0046] Кроме того, когда в вариантах осуществления настоящего раскрытия содержатся описания, включающие "первый", "второй" и т.д., эти описания предназначены только для описательных целей и не должны интерпретироваться как указывающие или подразумевающие их относительную важность или явно указывающие количество технических характеристик. То есть характеристика, определяемая как "первая" или "вторая", может включать по крайней мере одну такую характеристику, как явно, так и неявно. Кроме того, значение "и/или" в тексте означает включение трех одновременных решений. Например, "A и/или B" включает решение A, решение B и решение, в котором A и B удовлетворяются одновременно.
[0047] Упоминания "варианта осуществления" или "некоторых вариантов осуществления" и т.д., описанные в настоящей спецификации, подразумевают, что один или несколько вариантов осуществления настоящего раскрытия включают конкретную характеристику, структуру или свойство, описанные в связи с этим вариантом осуществления. Таким образом, фразы "в одном варианте осуществления", "в некоторых вариантах осуществления", "в некоторых других вариантах осуществления" и "в нескольких вариантах осуществления" и т.д., встречающиеся в различных местах настоящей спецификации, не обязательно относятся ко всем одним и тем же вариантам осуществления, а скорее означают "один или несколько, но не все варианты осуществления", если не указано иное. Термины "включающий", "содержащий", "имеющий" и их варианты означают "включающий, но не ограничивающийся", если не указано иное.
[0048] Кроме того, технические решения между различными вариантами осуществления могут быть комбинированы друг с другом, но это должно основываться на способности специалистов в данной области их реализовать. Когда комбинация технических решений оказывается противоречивой или недостижимой, следует считать, что такая комбинация технических решений не существует и не включена в объем настоящего раскрытия.
[0049] Блок-схемы, показанные на сопровождающих чертежах, являются лишь иллюстративными, и не обязательно включают все содержимое и операции/шаги, также не обязательно выполнять их в порядке, изображенном на чертежах. Например, существуют операции/шаги, которые могут быть разложены, объединены или частично совмещены, и, таким образом, фактический порядок выполнения может изменяться в зависимости от реальной ситуации.
[0050] В настоящее время обычная электрическая зубная щетка может только чистить зубы посредством одного режима высокочастотной вибрации, что не может имитировать большие возвратно-поступательные колебания человеческой руки вокруг осевого направления вала двигателя и, следовательно, не может эффективно и всесторонне очищать полость рта при неправильном использовании. Кроме того, обычная электрическая зубная щетка не может предоставлять специфические режимы очистки для различных частей полости рта, таких как язык, зубы и другие части рта, что приводит к плохому общему опыту использования продукта.
[0051] Для решения вышеуказанных проблем в вариантах осуществления настоящего раскрытия предложен способ управления двигателем, устройство, система, плата управления для электрической зубной щетки и читаемый носитель, чтобы обеспечить эффективное и всестороннее очищение полости рта электрической зубной щеткой, удовлетворяя потребности различных пользователей в чистке различных частей полости рта.
[0052] Со ссылкой на ФИГ. 1, ФИГ. 1 представляет собой блок-схему способа управления двигателем для электрической зубной щетки согласно первому варианту осуществления настоящего раскрытия. Способ управления двигателем применяется к двигателю электрической зубной щетки.
[0053] Настоящее раскрытие предлагает способ управления двигателем для электрической зубной щетки.
[0054] Как показано на ФИГ. 1, способ управления двигателем, предложенный в вариантах осуществления настоящего раскрытия, включает операции, представленные на блок-схеме.
[0055] На блоке S100: получение стартового или регулирующего сигнала.
[0056] Стартовый или регулирующий сигнал может быть командой, отправленной с внешнего терминала, такого как мобильный терминал (например, мобильный телефон, пульт дистанционного управления, планшетный ПК), фиксированный терминал (например, сервер, облако), операцией с клавишей или командой, вводимой пользователем в электрическую зубную щетку и т.д. Получение стартового или регулирующего сигнала может быть конкретно следующим: электрическая зубная щетка пассивно получает команду старта или регулировки, или электрическая зубная щетка получает результат путем обнаружения и определения в соответствии с текущей ситуацией, например, электрическая зубная щетка автоматически включается после обнаружения давления и температуры, вызванных удержанием рукой пользователя. Стартовый или регулирующий сигнал может быть командой для включения электрической зубной щетки или командой для регулировки электрической зубной щетки, такой как регулировка режима очистки, продолжительности чистки, частоты вибрации, амплитуды колебаний, скорости колебаний и т.д. электрической зубной щетки.
[0057] На блоке S200: управление валом двигателя 104 электрической зубной щетки для вибрации с заданной частотой относительно заданной осевой линии колебания.
[0058] Заданная частота может быть исходной частотой вибрации, установленной на заводе, частотой вибрации, установленной при включении, частотой вибрации, используемой пользователем при предыдущем использовании электрической зубной щетки, или частотой вибрации, установленной в команде регулировки. Другими словами, частота вибрации вала двигателя 104 электрической зубной щетки может быть отрегулирована в соответствии с требованиями. В некоторых вариантах осуществления частота вибрации вала двигателя 104 электрической зубной щетки может быть отрегулирована и установлена в диапазоне от 26 000 до 70 000 раз в минуту.
[0059] Можно понять, что щетинки электрической зубной щетки при вибрации будут иметь вибрацию вдоль длины щетинок и небольшую колебательную вибрацию в направлении, перпендикулярном длине щетинок и длине стержня щетки. Таким образом, вал двигателя 104 электрической зубной щетки фактически имеет небольшие возвратно-поступательные колебания вокруг оси вала двигателя 104 относительно оси. Заданная осевая линия колебания является осевой линией колебания вибрации вала двигателя 104. Направление расширения заданной осевой линии колебания совпадает с направлением расширения оси вала двигателя 104 электрической зубной щетки. В реальном использовании заданная осевая линия колебания является вертикальной линией расширения, проходящей через любую точку периферийной стены вала двигателя. Заданная осевая линия колебания параллельна оси вала двигателя 104, и линия, соединяющая заданную осевую линию колебания и ось вала двигателя 104, совпадает с радиальным направлением вала двигателя 104. Для облегчения сборки конец вала двигателя 104 обычно имеет вертикальную плоскость среза, и когда конец вала двигателя вставляется внутрь головки щетки, ориентация вертикальной плоскости среза совпадает с ориентацией щетинок головки щетки, которые обе обращены к пользователю. То есть заданная осевая линия колебания может фактически быть вертикальной центральной линией вертикальной плоскости среза вала двигателя.
[0060] На блоке S300: получение параметра положения заданной осевой линии колебания вала двигателя 104 электрической зубной щетки.
[0061] Существуют различные способы получения параметра положения заданной осевой линии колебания вала двигателя 104 электрической зубной щетки, такие как получение максимального положения отклонения вибрации вала двигателя 104 электрической зубной щетки в левом и правом направлениях во время вибрации, а затем вычисление центрального положения между ними с помощью формулы для получения положения заданной осевой линии колебания. Конечно, миниатюрный датчик может быть установлен на валу двигателя 104 для точного определения положения заданной осевой линии колебания электрической зубной щетки.
[0062] На блоке S400: управление заданной осевой линией колебания вала двигателя 104 электрической зубной щетки для перемещения вокруг оси вала двигателя 104 по заданной траектории.
[0063] Двигатель 103 электрической зубной щетки представляет собой сервопривод 103. Электрическая зубная щетка оснащена сервоприводом 103, который работает плавно, что позволяет щетке одновременно реализовать высокочастотную вибрацию и вращение вокруг оси вала двигателя 104. Заданная осевая линия колебания вала двигателя 104 перемещается вокруг оси вала двигателя 104 по заданной траектории, и заданная траектория может быть либо поворотом вперед на определенный угол, либо обратным поворотом на определенный угол, либо чередующимся возвратно-поступательным вращением в прямом и обратном направлениях, что может быть выбрано и настроено в соответствии с реальными потребностями. Управляя заданной осевой линией колебания электрической зубной щетки для перемещения вокруг оси вала двигателя 104 по заданной траектории, пользователь может задать различные заданные траектории для реализации управления валом двигателя 104 электрической зубной щетки для возвратно-поступательного колебания или вращения на 360 градусов вокруг оси вала двигателя 104 в значительной степени. Таким образом, пользователь может выбрать различные углы и режимы колебания в соответствии с различными частями полости рта, которые необходимо очистить, имитируя ручную чистку, в то время как высокочастотная вибрация головки щетки обеспечивает эффективную и всестороннюю очистку полости рта, удовлетворяя потребности различных пользователей в чистке различных частей полости рта.
[0064] В некоторых вариантах осуществления, со ссылкой на ФИГ. 2, шаг S300 включает следующее.
[0065] На блоке S310: согласно стартовому или регулирующему сигналу, получение параметра максимального положения вибрации в прямом направлении и параметра максимального положения вибрации в обратном направлении вала двигателя 104 электрической зубной щетки вокруг оси через датчик Холла и определение параметра положения заданной осевой линии колебания электрической зубной щетки в соответствии с параметром максимального положения вибрации в прямом направлении и параметром максимального положения вибрации в обратном направлении.
[0066] Электрическая зубная щетка колеблется вокруг оси вала двигателя 104 относительно заданной осевой линии колебания в реальном использовании. Понимается, что электрическая зубная щетка имеет цикл вибрации. Для облегчения иллюстрации цикла вибрации положение заданной осевой линии колебания определяется как нулевая точка a. Когда электрическая зубная щетка вибрирует, a+1° соответствует 1 миллисекунде, а a-1° также соответствует 1 миллисекунде. То есть движение электрической зубной щетки от положения a-1° до положения a+1° является циклом вибрации, и цикл вибрации составляет 2 миллисекунды.
[0067] Для точного определения положения заданной осевой линии колебания в определенный момент времени, например, в момент Tn, положение заданной осевой линии колебания в момент Tn может быть получено путем получения максимального смещенного положения вибрации в прямом и обратном направлениях в течение временного диапазона от Tn-1 до Tn+1 и вычисления положения заданной осевой линии колебания в момент Tn с помощью компьютерной симуляции или формулы. Конкретно, датчик Холла включает печатную плату и магнитные полюса, закрепленные на валу двигателя 104, причем магнитные полюса включают полюс N и полюс S, которые радиально симметричны относительно вала двигателя 104. Когда вал двигателя 104 вибрирует, рецептор на печатной плате может обнаружить силу двух магнитных полюсов, тем самым получая кривую о силе магнитного сигнала, и таким образом можно определить положение вала двигателя 104 в каждый момент времени через вычисление. Способ определения параметра положения заданной осевой линии колебания электрической зубной щетки с помощью датчика Холла на основе параметра максимального положения вибрации в прямом направлении и параметра максимального положения вибрации в обратном направлении позволяет получить параметр положения заданной осевой линии колебания вала двигателя 104 электрической зубной щетки в определенный момент времени в реальном времени с меньшими затратами, меньшей ошибкой и более высокой точностью по сравнению с другими методами.
[0068] В некоторых вариантах осуществления, как показано на ФИГ. 3, шаг S400 включает следующее.
[0069] На блоке S410: в режиме колебания управление заданной осевой линией колебания электрической зубной щетки для колебания на заданный угол вокруг оси вала двигателя 104 в прямом и обратном направлениях, при этом заданный угол составляет не менее 10 градусов и не более 60 градусов; и/или
[0070] На блоке S420: в режиме вращения управление заданной осевой линией колебания электрической зубной щетки для вращения на 360 градусов вокруг оси вала двигателя 104.
[0071] В режиме колебания заданная осевая линия колебания электрической зубной щетки управляется для колебания на заданный угол вокруг оси вала двигателя 104 в прямом и обратном направлениях. Например, вал двигателя 104 электрической зубной щетки сначала колеблется на определенный угол в прямом направлении вокруг своей оси, затем колеблется на другой угол в обратном направлении вокруг своей оси, а затем снова на определенный угол в прямом направлении и так далее, чтобы имитировать движение руки человека, колеблющей головку щетки для чистки зубов. Угол колебания электрической зубной щетки может быть установлен пользователем в соответствии с реальными потребностями, что повышает универсальность продукта. Понимается, что заданный угол является включенным углом между заданной осевой линией колебания, когда вал двигателя 104 электрической зубной щетки колеблется вперед до установленного положения, и заданной осевой линией колебания, когда вал двигателя 104 электрической зубной щетки колеблется назад до установленного положения. Заданный угол может быть конкретно 10 градусов, 20 градусов, 25 градусов, 35 градусов, 40 градусов, 50 градусов, 60 градусов и т.д. Если заданный угол меньше 10 градусов, колебание вала двигателя 104 электрической зубной щетки будет небольшим, и он не сможет имитировать большое колебание руки человека для улучшения эффективности чистки. Если заданный угол больше 60 градусов, амплитуда колебания вала двигателя 104 электрической зубной щетки будет слишком большой, и щетинки щетки могут касаться десен, что снижает эффективность чистки и может вызвать кровотечение десен. Сделав заданный угол больше или равным 10 градусам и меньше или равным 60 градусам, диапазон угла колебания вала двигателя 104 электрической зубной щетки устанавливается разумно, что эффективно имитирует значительное колебание руки человека и улучшает эффективность чистки, не повреждая десны. Заданный угол возвратно-поступательного колебания заданной осевой линии колебания вала двигателя 104 электрической зубной щетки может быть выбран и установлен в соответствии с реальными потребностями, и он не ограничивается конкретно здесь.
[0072] В режиме вращения заданная осевая линия колебания электрической зубной щетки управляется для вращения на 360 градусов вокруг оси вала двигателя 104. Заданная осевая линия колебания электрической зубной щетки может управляться для вращения в прямом направлении или управляться для вращения в обратном направлении, при этом направление вращения может быть установлено на заводе или быть настраиваемым.
[0073] Вал двигателя 104 электрической зубной щетки настроен на наличие режима колебания и режима вращения. Таким образом, в режиме колебания заданная осевая линия колебания вала двигателя 104 электрической зубной щетки колеблется вперед и назад вокруг своей оси, при этом вал двигателя 104 электрической зубной щетки может быть оснащен обычной головкой щетки для приведения ее в возвратно-поступательное движение влево и вправо вокруг оси, что может имитировать движение руки человека, чистящей зубы, тем самым улучшая эффективность чистки зубов. В режиме вращения заданная осевая линия колебания вала двигателя 104 электрической зубной щетки вращается на 360 градусов вокруг своей оси, при этом вал двигателя 104 электрической зубной щетки может быть оснащен головкой щетки для языка, приводящей головку щетки для языка в вращение на 360 градусов, чтобы обеспечить чистку языка на 360 градусов. Таким образом, пользователь может выбрать режим колебания или режим вращения в соответствии с потребностями в чистке различных частей полости рта. Другими словами, используя одну ручку электрической зубной щетки, совместимую с различными головками щеток, можно реализовать различные функции чистки для чистки различных частей полости рта, что является многофункциональным и значительно улучшает удобство продукта и снижает затраты на чистку для потребителей.
[0074] Выбор для входа в режим колебания или режим вращения может быть сделан с помощью операции с клавишей или команды, вводимой пользователем в электрическую зубную щетку, или команды, отправленной с внешнего терминала, такого как мобильный терминал (например, мобильный телефон, пульт дистанционного управления, планшетный ПК), фиксированный терминал (например, сервер, облако) и т.д. Конечно, вал двигателя 104 электрической зубной щетки может автоматически выбирать вход в режим колебания или режим вращения в соответствии с результатом, полученным путем обнаружения и определения текущей ситуации. Например, на головке щетки для языка установлен магнит, на обычной головке щетки магнит не установлен, а на ручке электрической зубной щетки установлен датчик Холла. Когда электрическая зубная щетка оснащена головкой щетки для языка, датчик Холла обнаруживает головку щетки для языка и затем активно отправляет команду на плату управления для перевода электрической зубной щетки в режим вращения. Когда электрическая зубная щетка оснащена обычной головкой щетки, датчик Холла указывает электрической зубной щетке войти в режим колебания.
[0075] В других вариантах осуществления, как показано на ФИГ. 4, шаг S200 включает следующее.
[0076] На блоке S210: управление валом двигателя 104 электрической зубной щетки для возвратно-поступательной вибрации вокруг оси с постоянной мощностью относительно заданной осевой линии колебания.
[0077] Когда головка щетки электрической зубной щетки касается зубов, на головку щетки электрической зубной щетки будет оказываться обратное давление. Когда давление передается на вал двигателя 104 электрической зубной щетки, это приведет к неравномерному выходу силы вала двигателя 104 электрической зубной щетки на головку щетки. Управляя валом двигателя 104 электрической зубной щетки для возвратно-поступательной вибрации вокруг своей оси с постоянной мощностью относительно заданной осевой линии колебания, сила, передаваемая двигателем 103 на головку щетки, остается постоянной после подключения головки щетки к валу двигателя 104, что улучшает комфорт чистки и равномерность чистки электрической зубной щеткой. Конкретное значение постоянной мощности вала двигателя 104 электрической зубной щетки для возвратно-поступательной высокочастотной вибрации вокруг своей оси может быть установлено в соответствии с реальными потребностями, что здесь не ограничивается.
[0078] В некоторых вариантах осуществления шаг S400 включает конкретно следующее.
[0079] Управление заданной осевой линией колебания вала двигателя 104 электрической зубной щетки для колебания вокруг оси вала двигателя 104 в прямом и обратном направлениях с заданной частотой; при этом соотношение заданной частоты вибрации вала двигателя 104 к заданной частоте прямого и обратного возвратно-поступательного колебания заданной осевой линии колебания вала двигателя 104 вокруг оси вала двигателя 104 составляет не менее 60.
[0080] Заданная осевая линия колебания вала двигателя 104 электрической зубной щетки колеблется вокруг оси вала двигателя 104 в прямом и обратном направлениях с заданной частотой, что может имитировать движение руки человека, колеблющей головку щетки для чистки зубов, тем самым повышая эффективность чистки. Время, необходимое для перемещения заданной осевой линии колебания вала двигателя 104 электрической зубной щетки вокруг оси вала двигателя 104 от максимального положения колебания вперед до максимального положения колебания назад в одном движении, определяется как цикл колебания. Заданная частота прямого и обратного возвратно-поступательного колебания заданной осевой линии колебания вала двигателя 104 вокруг оси вала двигателя 104 является обратной величиной цикла колебания электрической зубной щетки.
[0081] Заданная частота вибрации вала двигателя 104 обычно составляет от 26 000 до 70 000 раз в минуту для реализации высокочастотной вибрации головки щетки, тем самым эффективно очищая зубы и обеспечивая широкий диапазон применимости для пользователя. Делая соотношение заданной частоты вибрации вала двигателя 104 к заданной частоте прямого и обратного возвратно-поступательного колебания заданной осевой линии колебания вала двигателя 104 вокруг оси вала двигателя 104 больше или равно 60, то есть частота колебания вала двигателя 104 значительно меньше частоты вибрации, вал двигателя 104 колеблется с более медленной частотой, что позволяет избежать повреждения десен и зубов при имитации ручной чистки зубов, что улучшает эффективность чистки и комфорт использования. В некоторых вариантах осуществления заданная частота прямого и обратного возвратно-поступательного колебания заданной осевой линии колебания вала двигателя 104 вокруг оси вала двигателя 104 составляет примерно от 100 до 400 раз в минуту, что делает частоту колебания вала двигателя 104 соответствующей, обеспечивая пользователю больший комфорт и избегая повреждения десен и зубов при эффективной чистке полости рта.
[0082] В некоторых вариантах осуществления, со ссылкой на ФИГ. 5, шаг S200 включает конкретно следующее.
[0083] На блоке S20: управление валом двигателя 104 электрической зубной щетки для вибрации с заданной частотой вибрации и заданным углом вибрации относительно заданной осевой линии колебания через управление вектором магнитного поля (Field Oriented Control, FOC).
[0084] Шаг S400 включает конкретно следующее.
[0085] На блоке S40: управление заданной осевой линией колебания вала двигателя 104 электрической зубной щетки для вращения вокруг оси вала двигателя 104 с заданным углом колебания и заданной скоростью колебания через FOC.
[0086] Двигатель 103 электрической зубной щетки в настоящем раскрытии может конкретно представлять собой сервопривод 103. Применяя FOC к сервоприводу 103, FOC используется для управления частотой вибрации, углом вибрации, углом колебания и скоростью колебания вала двигателя 104 для реализации управления работой двигателя 103, чтобы сделать крутящий момент двигателя 103 плавным, с низким уровнем шума, высокой эффективностью и высокой динамической реакцией. Частота вибрации, угол вибрации, угол колебания и скорость колебания вала двигателя 104 электрической зубной щетки могут быть настроены на регулировку, и таким образом пользователь может выбирать различные параметры в соответствии с различными требованиями для повышения универсальности электрической зубной щетки.
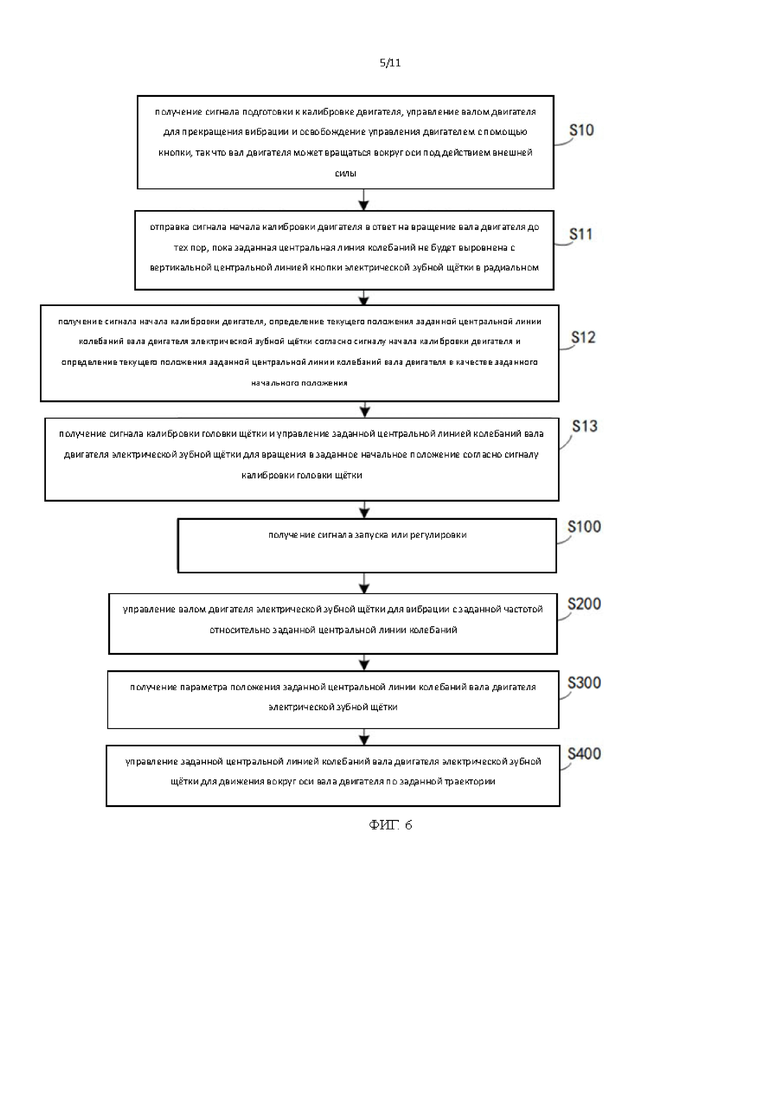
[0087] В других вариантах осуществления, со ссылкой на ФИГ. 6, до шага S100 способ дополнительно включает следующее.
[0088] На блоке S10: Прием сигнала подготовки калибровки двигателя, управление валом двигателя 104 для прекращения вибрации и снятие контроля с двигателя посредством клавиши, так чтобы вал двигателя 104 мог вращаться вокруг оси под действием внешней силы;
[0089] На блоке S11: отправка сигнала начала калибровки двигателя в ответ на вращение вала двигателя 104 до тех пор, пока заданная осевая линия колебания не совпадет с вертикальной осевой линией клавиши электрической зубной щетки в радиальном направлении вала двигателя 104;
[0090] На блоке S12: Прием сигнала начала калибровки двигателя, получение текущего положения заданной осевой линии колебания вала двигателя 104 электрической зубной щетки в соответствии с сигналом начала калибровки двигателя и определение текущего положения заданной осевой линии колебания вала двигателя 104 как заданного начального положения;
[0091] На блоке S13: Прием сигнала калибровки головки щетки и управление заданной осевой линией колебания вала двигателя 104 электрической зубной щетки для вращения к заданному начальному положению в соответствии с сигналом калибровки головки щетки.
[0092] Поскольку вал двигателя 104 электрической зубной щетки в настоящем раскрытии имеет режим перемещения вокруг своей оси по заданной траектории, такой как возвратно-поступательное колебание и вращение на 360 градусов, когда головка щетки собирается на вал двигателя 104, может возникнуть ситуация, при которой головка щетки будет перекошена и не будет расположена вместе с клавишей прямо по отношению к пользователю. Калибруя вал двигателя 104 перед запуском или регулировкой конкретных параметров вала двигателя 104, можно откалибровать положение центральной точки головки щетки для повышения точности использования электрической зубной щетки.
[0093] Сигнал подготовки калибровки двигателя может конкретно представлять собой команду, отправленную с зарядной подставки или внешнего терминала, такого как мобильный терминал (например, мобильный телефон, пульт дистанционного управления, планшетный ПК), фиксированный терминал (например, сервер, облако). Команда сигнала подготовки калибровки двигателя может быть отправлена по Bluetooth. Когда мотор зубной щетки вибрирует, мотор перестанет вибрировать после получения этой команды. В то же время электрическая зубная щетка блокирует функцию клавиши, в этом случае пользователь может вручную вращать вал двигателя 104, чтобы обновить нулевую позицию вала двигателя 104.
[0094] Для облегчения сборки конец вала двигателя 104 обычно имеет вертикальную плоскость среза, и когда конец вала двигателя 104 вставляется в головку щетки, ориентация вертикальной плоскости среза совпадает с ориентацией щетинок головки щетки, которые обе обращены к пользователю. То есть заданная осевая линия колебания фактически является вертикальной центральной линией вертикальной плоскости среза вала двигателя 104. Пользователь может откалибровать нулевую позицию вала двигателя 104 через вертикальную плоскость среза вала двигателя 104. В реальной эксплуатации вал двигателя 104 вращается до тех пор, пока вертикальная плоскость среза не совпадет с плоскостью, где расположена клавиша на корпусе электрической зубной щетки. Когда вертикальная центральная линия вертикальной плоскости среза вала двигателя 104 (то есть заданная осевая линия колебания) совпадает с вертикальной центральной линией плоскости, где расположена клавиша двигателя в радиальном направлении вала двигателя 104, вал двигателя 104 находится в нулевой позиции. Этот метод выравнивания более удобен для оператора. Сигнал начала калибровки двигателя может быть передан обратно по Bluetooth, и текущее положение заданной осевой линии колебания вала двигателя 104 может быть определено как заданное начальное положение (то есть нулевая позиция). Впоследствии, когда пользователь использует электрическую зубную щетку, он может отправить сигнал калибровки головки щетки на электрическую зубную щетку через внешний терминал, такой как мобильное приложение, небольшая программа и т.д., и тогда зубная щетка будет автоматически откалибрована, так что вал двигателя 104 электрической зубной щетки 104 повернется к нулевой позиции (заданному начальному положению), то есть ориентация щетинок головки щетки совпадает с ориентацией клавиши, и обе они расположены прямо по отношению к пользователю. Таким образом, можно обеспечить точность использования электрической зубной щетки и предотвратить смещение головки щетки из-за долгосрочного использования.
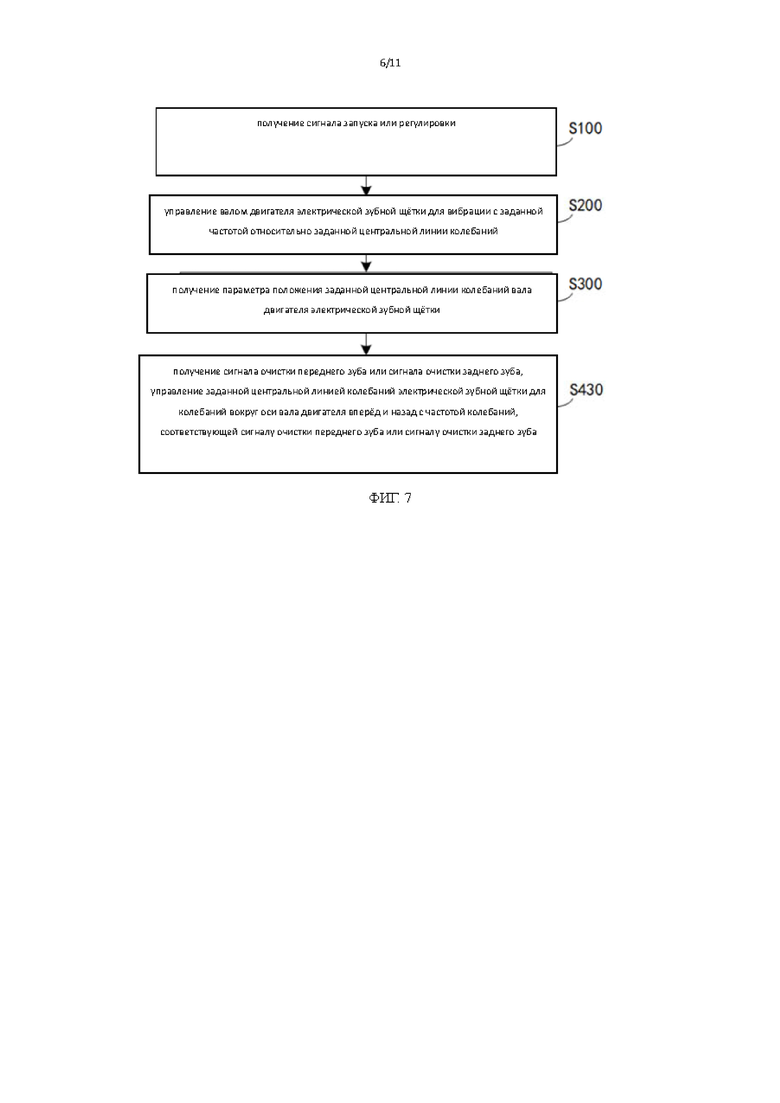
[0095] В некоторых вариантах осуществления, со ссылкой на ФИГ. 7, шаг S400 включает конкретно следующее.
[0096] На блоке S430: получение сигнала очистки передних зубов или сигнала очистки задних зубов, управление заданной осевой линией колебания электрической зубной щетки для колебания вокруг оси вала двигателя 104 вперед и назад с частотой колебания, соответствующей сигналу очистки передних зубов или сигналу очистки задних зубов.
[0097] Время, необходимое для перемещения заданной осевой линии колебания вала двигателя 104 электрической зубной щетки от максимального положения колебания вперед до максимального положения колебания назад вокруг оси вала двигателя 104 в одном движении, определяется как цикл колебания, и, таким образом, частота колебания заданной осевой линии колебания вала двигателя 104 электрической зубной щетки вокруг оси вала двигателя 104 и цикл колебания обратно пропорциональны друг другу. Зубы человека можно разделить на передние зубы и задние зубы, и поскольку передние зубы и задние зубы расположены в разных местах и имеют разные размеры, фактические режимы очистки, необходимые для передних и задних зубов, различаются. Частота колебания, соответствующая сигналу очистки передних зубов, и частота колебания, соответствующая сигналу очистки задних зубов, сделаны различными, так что разные области зубов можно очищать в разных режимах, что может значительно улучшить эффективность очистки электрической зубной щетки для всей полости рта. Например, частота колебания, соответствующая сигналу очистки передних зубов, больше, чем частота колебания, соответствующая сигналу очистки задних зубов. Сигнал очистки передних зубов или сигнал очистки задних зубов может быть выдан пользователем через клавишу или внешний мобильный терминал, либо может быть выдан автоматически после обнаружения и распознавания головкой щетки. Частота колебания или цикл колебания, соответствующие сигналу очистки передних зубов и сигналу очистки задних зубов, могут быть установлены и отрегулированы пользователем либо адаптивно регулироваться путем непрерывного обучения через нейронную сеть в алгоритме ИИ.
[0098] Далее, передние и задние зубы могут быть дополнительно подразделены. Например, передние зубы можно разделить на центральные резцы, боковые резцы и клыки, а задние зубы можно разделить на первые моляры, вторые моляры, третьи моляры и т.д. Частота колебания, соответствующая сигналу очистки передних зубов и сигналу очистки задних зубов, может быть дополнительно уточнена в зависимости от различных уточненных классификаций передних и задних зубов. Например, сигнал очистки передних зубов включает в себя сигнал очистки центральных резцов, сигнал очистки боковых резцов и сигнал очистки клыков, а сигнал очистки задних зубов включает в себя сигнал очистки первого моляра, сигнал очистки второго моляра и сигнал очистки третьего моляра, так что частоты колебания, соответствующие сигналам очистки для каждой области зубов, различны.
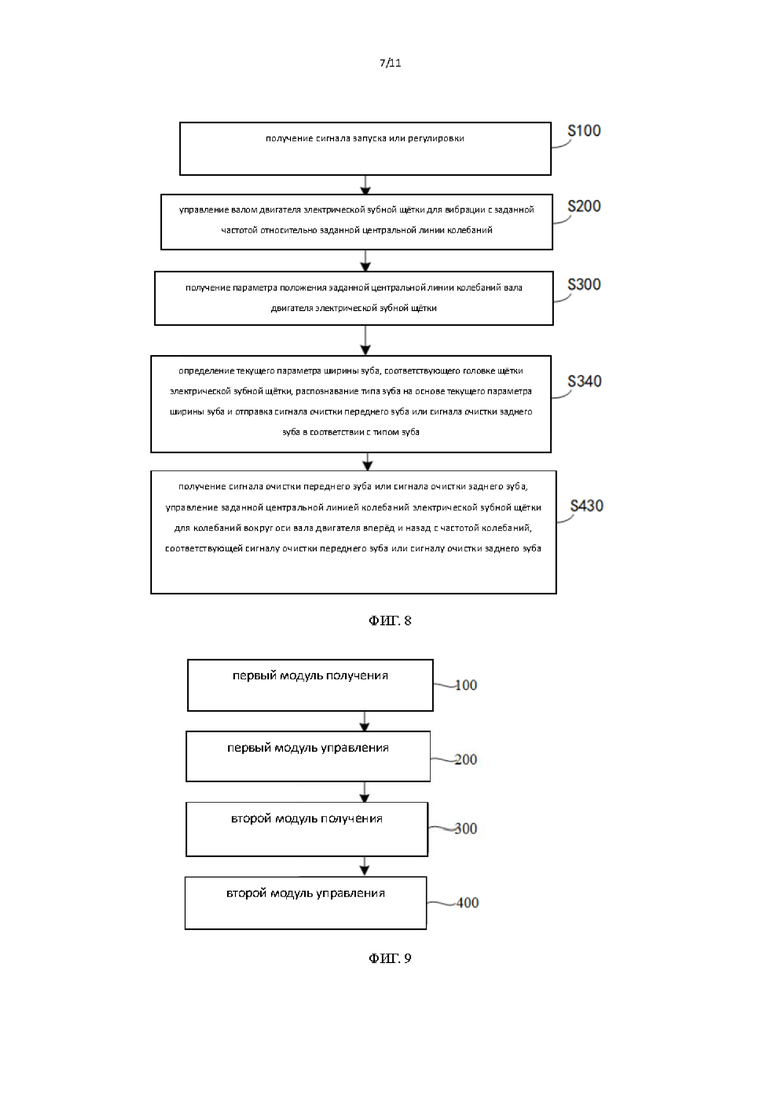
[0099] В других вариантах осуществления, как показано на ФИГ. 8, после шага S300 и до шага S430 способ дополнительно включает:
[00100] На блоке S340: определение текущего параметра ширины зуба, соответствующего головке щетки электрической зубной щетки, распознавание типа зуба на основе текущего параметра ширины зуба и отправка сигнала очистки передних зубов или сигнала очистки задних зубов в соответствии с типом зуба.
[00101] Поскольку ширина передних и задних зубов различна, например, ширина передних зубов взрослого человека составляет примерно от 5 мм до 8 мм, а ширина задних зубов составляет примерно от 8 мм до 10 мм, тип зуба может быть точно распознан путем определения текущего параметра ширины зуба, соответствующего головке щетки электрической зубной щетки. Конечно, тип зуба может быть распознан по другим параметрам. Конкретно, текущий параметр ширины зуба может быть определен блоком сбора, и собранный параметр ширины зуба передается на основной управляющий чип для распознавания типа зуба; выбирается заданная частота колебания в соответствии с типом зуба, при этом сигнал очистки передних зубов и сигнал очистки задних зубов соответствуют различным заданным частотам колебания, и отправляется соответствующий сигнал очистки; затем электрическая зубная щетка управляется для очистки с заданной частотой колебания, соответствующей сигналу очистки. Блок сбора может быть датчиком расстояния или микрокамерой, но не ограничивается этим, и может быть другими датчиками.
[00102] Далее, после шага определения текущего параметра ширины зуба и до шага распознавания типа зуба в соответствии с текущим параметром ширины зуба способ дополнительно включает: в ответ на наличие ошибки в текущем параметре ширины зуба, соответствующем головке щетки электрической зубной щетки, и когда ошибка находится за пределами нормального диапазона параметров ширины зуба, передача обратной связи с сообщением «неправильная информация», использование ближайшей нормальной ширины зуба для заполнения неправильной информации и распознавание типа зуба в соответствии с ближайшей нормальной шириной зуба. Например, когда в собранном параметре существует ошибка, такая как ширина зуба, собранная как 1 мм, неправильная информация передается обратно на основной управляющий чип, в этом случае вызывается и используется ближайшая собранная ширина, такая как минимальная ширина зуба 5 мм, зуб распознается как передний зуб и затем отправляется сигнал очистки передних зубов для заполнения неправильной информации.
[00103] Электрическая зубная щетка может дополнительно распознавать взрослого и ребенка, чтобы выполнять блокировку для детей, когда она распознается как предназначенная для использования ребенком, или не различать режимы очистки, когда она распознается как предназначенная для использования ребенком. Электрическая зубная щетка может распознаваться как предназначенная для использования взрослым с помощью отпечатка пальца, когда палец касается клавиши, и понимается, что распознавание взрослого с помощью отпечатка пальца не является единственным способом и может быть реализовано с помощью распознавания лица и т.п.
[00104] Как показано на ФИГ. 9, настоящее раскрытие дополнительно предлагает устройство управления двигателем для электрической зубной щетки, включающее следующие элементы.
[00105] первый модуль получения 100, настроенный для получения стартового или регулирующего сигнала;
[00106] первый модуль управления 200, настроенный для управления валом двигателя 104 электрической зубной щетки для вибрации с заданной частотой относительно заданной осевой линии колебания в соответствии со стартовым или регулирующим сигналом;
[00107] второй модуль получения 300, настроенный для получения параметра положения заданной осевой линии колебания вала двигателя 104 электрической зубной щетки; и
[00108] второй модуль управления 400, настроенный для управления заданной осевой линией колебания вала двигателя 104 электрической зубной щетки для перемещения вокруг оси вала двигателя 104 по заданной траектории.
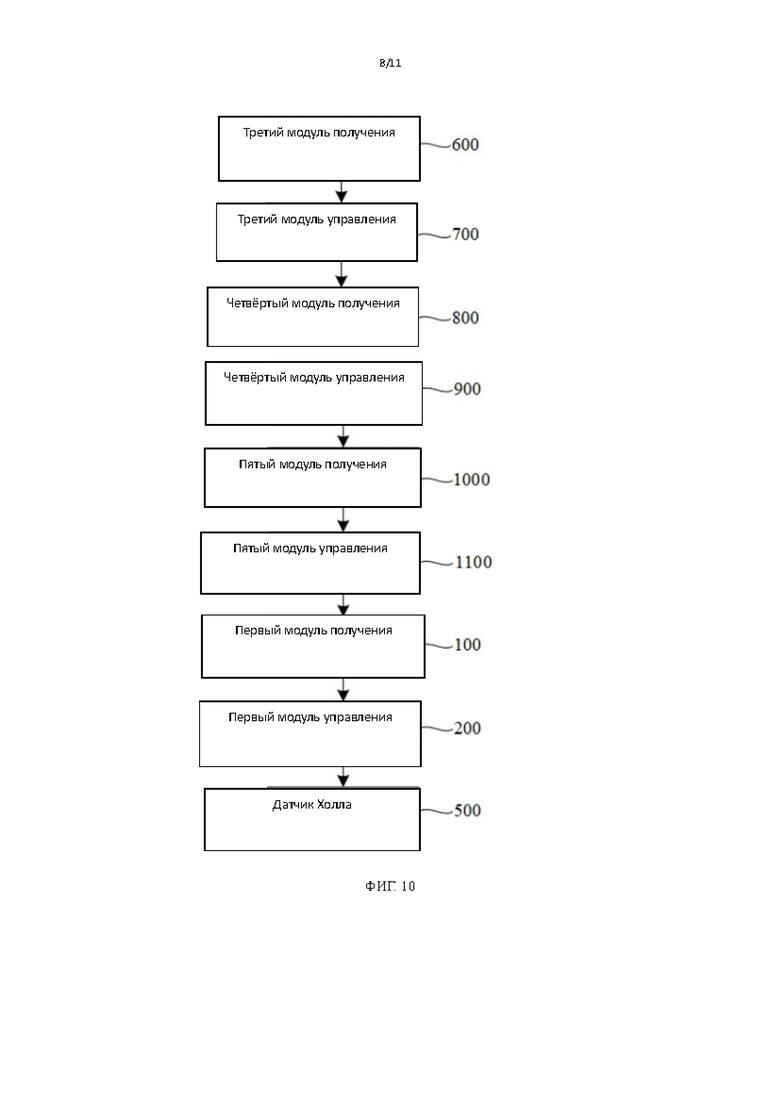
[00109] Со ссылкой на ФИГ. 10, в некоторых вариантах осуществления устройство управления двигателем дополнительно включает датчик Холла 500, и датчик Холла 500 настроен для получения параметра максимального положения вибрации в прямом направлении и параметра максимального положения вибрации в обратном направлении вала двигателя 104 электрической зубной щетки вокруг оси в соответствии со стартовым или регулирующим сигналом, и определения параметра положения заданной осевой линии колебания электрической зубной щетки в соответствии с параметром максимального положения вибрации в прямом направлении и параметром максимального положения вибрации в обратном направлении.
[00110] В некоторых вариантах осуществления, второй модуль управления 400 настроен для управления заданной осевой линией колебания электрической зубной щетки в режиме колебания для колебания на заданный угол вокруг оси вала двигателя 104 в прямом и обратном направлениях, при этом заданный угол составляет не менее 10 градусов и не более 60 градусов; и/или
[00111] второй модуль управления 400 настроен для управления заданной осевой линией колебания электрической зубной щетки в режиме вращения для вращения на 360 градусов вокруг оси вала двигателя 104.
[00112] В некоторых вариантах осуществления, первый модуль управления 200 настроен для управления валом двигателя 104 электрической зубной щетки для возвратно-поступательной вибрации вокруг оси с постоянной мощностью относительно заданной осевой линии колебания в соответствии со стартовым или регулирующим сигналом.
[00113] В некоторых вариантах осуществления, второй модуль управления 400 настроен для управления заданной осевой линией колебания вала двигателя 104 электрической зубной щетки для колебания вокруг оси вала двигателя 104 в прямом и обратном направлениях с заданной частотой; при этом соотношение заданной частоты вибрации вала двигателя 104 к заданной частоте прямого и обратного возвратно-поступательного колебания заданной осевой линии колебания вала двигателя 104 вокруг оси вала двигателя 104 составляет не менее 60.
[00114] В некоторых вариантах осуществления, первый модуль управления 200 настроен для управления валом двигателя 104 электрической зубной щетки для вибрации с заданной частотой вибрации и заданным углом вибрации относительно заданной осевой линии колебания через управление вектором магнитного поля (Field Oriented Control, FOC).
[00115] Второй модуль управления 400 настроен для управления заданной осевой линией колебания вала двигателя 104 электрической зубной щетки для вращения вокруг оси вала двигателя 104 с заданным углом колебания и заданной скоростью колебания через FOC.
[00116] В некоторых вариантах осуществления, как показано на ФИГ. 10, устройство управления двигателем дополнительно включает следующий элемент:
[00117] третий модуль получения 600, настроенный для приема сигнала подготовки калибровки двигателя;
[00118] третий модуль управления 700, настроенный для управления валом двигателя для прекращения вибрации и снятия контроля с двигателя посредством клавиши, так чтобы вал двигателя 104 мог вращаться вокруг оси под действием внешней силы; и отправку сигнала начала калибровки двигателя в ответ на вращение вала двигателя 104 до тех пор, пока заданная осевая линия колебания не совпадет с вертикальной осевой линией клавиши электрической зубной щетки в радиальном направлении вала двигателя 104;
[00119] четвертый модуль получения 800, настроенный для приема сигнала начала калибровки двигателя;
[00120] четвертый модуль управления 900, настроенный для получения текущего положения заданной осевой линии колебания вала двигателя 104 электрической зубной щетки в соответствии с сигналом начала калибровки двигателя и определения текущего положения заданной осевой линии колебания вала двигателя 104 как заданного начального положения;
[00121] пятый модуль получения 1000, настроенный для приема сигнала калибровки головки щетки; и
[00122] пятый модуль управления 1100, настроенный для управления заданной осевой линией колебания вала двигателя 104 электрической зубной щетки для вращения к заданному начальному положению в соответствии с сигналом калибровки головки щетки.
[00123] В некоторых вариантах осуществления, устройство управления двигателем дополнительно включает следующий элемент:
[00124] шестой модуль получения, настроенный для приема сигнала очистки передних зубов или сигнала очистки задних зубов; и
[00125] шестой модуль управления, настроенный для управления заданной осевой линией колебания электрической зубной щетки для колебания вокруг оси вала двигателя 104 в прямом и обратном направлениях с частотой колебания, соответствующей сигналу очистки передних зубов или сигналу очистки задних зубов.
[00126] В некоторых вариантах осуществления, устройство управления двигателем дополнительно включает следующий элемент:
[00127] модуль получения, настроенный для определения текущего параметра ширины зуба, соответствующего головке щетки электрической зубной щетки; и
[00128] модуль распознавания, настроенный для распознавания типа зуба на основе текущего параметра ширины зуба и отправки сигнала очистки передних зубов или сигнала очистки задних зубов в соответствии с типом зуба.
[00129] Поскольку устройство управления двигателем настоящего раскрытия использует технические решения, соответствующие всем вариантам осуществления вышеописанного способа управления двигателем, оно обладает по крайней мере всеми полезными эффектами, обусловленными техническими решениями вышеописанных вариантов осуществления, которые здесь не будут повторяться.
[00130] В качестве примера, со ссылкой на ФИГ. 11 и ФИГ. 12, настоящее раскрытие также предлагает электрическую зубную щетку, включающую двигатель 103, память 101, процессор 102 и программу, хранящуюся в памяти 101 для реализации способа управления двигателем для электрической зубной щетки; память 101 настроена для хранения программы для реализации способа управления двигателем для электрической зубной щетки; процессор 102 настроен для выполнения программы для реализации способа управления двигателем для электрической зубной щетки, чтобы осуществить шаги, описанные в любом из вышеуказанных вариантов осуществления. Двигатель 103 может конкретно представлять собой сервопривод 103. Процессор 102 и память 101 соединены через шину, которая, например, может быть шиной Serial Peripheral Interface (SPI) или шиной Inter-Integrated Circuit (I2C). Конкретно, процессор 102 может быть микроконтроллером (MCU), центральным процессором (CPU) или цифровым сигнальным процессором (DSP) и т.д. Конкретно, память 101 может быть флеш-чипом, устройством для чтения только из памяти (ROM), CD-ROM, USB-флешкой или съемным жестким диском и т.д.
[00131] Например, процессор 102 настроен для выполнения компьютерной программы, хранящейся в памяти 101, и выполнения следующих шагов при выполнении компьютерной программы:
[00132] получение стартового или регулирующего сигнала;
[00133] управление валом двигателя 104 электрической зубной щетки для вибрации с заданной частотой относительно заданной осевой линии колебания в соответствии со стартовым или регулирующим сигналом;
[00134] получение параметра положения заданной осевой линии колебания вала двигателя 104 электрической зубной щетки; и
[00135] управление заданной осевой линией колебания вала двигателя 104 электрической зубной щетки для перемещения вокруг оси вала двигателя 104 по заданной траектории.
[00136] Конкретная реализация каждого из вышеуказанных шагов способа управления двигателем электрической зубной щетки может быть найдена в предыдущих вариантах осуществления и здесь не будет повторяться. Поскольку электрическая зубная щетка использует все технические решения всех вышеуказанных вариантов осуществления способа управления двигателем для электрической зубной щетки, она обладает по крайней мере всеми полезными эффектами, обусловленными техническими решениями вышеуказанных вариантов осуществления, которые здесь не будут повторяться.
[00137] Настоящее раскрытие также предлагает систему управления для электрической зубной щетки, включающую электрическую зубную щетку и мобильный управляющий модуль, беспроводно подключенный к электрической зубной щетке; мобильный управляющий модуль включает мобильный терминал для поддержки работы приложения (APP) и приложение (APP) для взаимодействия с электрической зубной щеткой.
[00138] Приложение (APP) предоставляет интерфейс для получения внешнего управления, и приложение (APP) может генерировать команду управления двигателем на основе внешнего управления и отправлять команду управления двигателем на электрическую зубную щетку; электрическая зубная щетка получает команду управления двигателем и управляет работой двигателя 103.
[00139] Мобильный терминал настоящего раскрытия может быть смартфоном, планшетным компьютером, портативным компьютером и другими переносными терминальными устройствами. Путем запуска приложения (APP) на мобильном терминале и взаимодействия с электрической зубной щеткой через приложение (APP) пользователь может управлять и контролировать электрическую зубную щетку, используя интерфейс управления приложения (APP), например, включать/выключать режим высокочастотной вибрации, нажимать для восстановления параметров текущего режима, регулировать частоту вибрации, скорость колебания и угол колебания электрической зубной щетки, устанавливать продолжительность чистки, переключать режимы чистки и т.д., что значительно повышает удобство использования для пользователя.
[00140] Далее, электрическая зубная щетка подключена к мобильному управляющему модулю через модуль беспроводной связи для вывода параметра работы двигателя, приложение (APP) выводит команду управления двигателем на основе внешнего управления для изменения параметра работы двигателя, и электрическая зубная щетка получает команду управления двигателем и работает в соответствии с измененным параметром работы двигателя. Модуль беспроводной связи может конкретно представлять собой модуль Bluetooth, Wi-Fi и другие беспроводные коммуникационные структуры. Таким образом, пользователь может напрямую регулировать параметр работы двигателя электрической зубной щетки, управляя интерфейсом управления приложения (APP), что улучшает удобство управления.
[00141] Например, параметр работы двигателя включает: частоту вибрации, с которой вал двигателя 104 электрической зубной щетки вибрирует вокруг своей оси относительно заданной осевой линии колебания, скорость колебания, с которой заданная осевая линия колебания вала двигателя 104 электрической зубной щетки перемещается вокруг оси вала двигателя 104 по заданной траектории, и угол, под которым заданная осевая линия колебания электрической зубной щетки вращается вокруг оси вала двигателя.
[00142] Как показано на ФИГ. 13, настоящее раскрытие дополнительно предлагает плату управления для электрической зубной щетки, включающую:
[00143] модуль переключения 20, настроенный для вывода сигнала переключения;
[00144] модуль регулировки 30, настроенный для вывода сигнала регулировки параметров двигателя;
[00145] датчик Холла 40, настроенный для определения параметра положения заданной осевой линии колебания вала двигателя 104 электрической зубной щетки; и
[00146] контроллер 10, где входной конец контроллера 10 электрически подключен к модулю переключения 20 и модулю регулировки 30, а выходной конец контроллера 10 электрически подключен к двигателю 103 электрической зубной щетки;
[00147] контроллер 10 настроен для получения стартового или регулирующего сигнала и управления валом двигателя 104 электрической зубной щетки для вибрации с заданной частотой относительно заданной осевой линии колебания в соответствии со стартовым или регулирующим сигналом; контроллер 10 также настроен для управления заданной осевой линией колебания вала двигателя 104 электрической зубной щетки для перемещения вокруг оси вала двигателя 104 по заданной траектории.
[00148] Поскольку плата управления настоящего раскрытия использует технические решения, соответствующие всем вариантам осуществления вышеописанного способа управления двигателем, она обладает по крайней мере всеми полезными эффектами, обусловленными техническими решениями вышеописанных вариантов осуществления, которые здесь не будут повторяться.
[00149] Настоящее раскрытие дополнительно предлагает читаемый носитель, где компьютерно-читаемый носитель настроен для хранения одной или нескольких программ, которые могут быть выполнены одним или несколькими процессорами 102; читаемый носитель настроен для хранения программы управления двигателем для электрической зубной щетки, причем программа управления двигателем исполняема процессором 102 для реализации шагов способа управления двигателем электрической зубной щетки, описанных в любом из вышеуказанных вариантов осуществления.
[00150] Например, компьютерная программа загружается процессором 102 и может выполнять следующие шаги:
[00151] получение стартового или регулирующего сигнала;
[00152] управление валом двигателя 104 электрической зубной щетки для вибрации с заданной частотой относительно заданной осевой линии колебания;
[00153] получение параметра положения заданной осевой линии колебания вала двигателя 104 электрической зубной щетки; и
[00154] управление заданной осевой линией колебания вала двигателя 104 электрической зубной щетки для перемещения вокруг оси вала двигателя 104 по заданной траектории.
[00155] Конкретная реализация вышеуказанных шагов в способе управления двигателем электрической зубной щетки может быть найдена в предыдущих вариантах осуществления и здесь не будет повторяться. Поскольку настоящий читаемый носитель использует технические решения, соответствующие всем вариантам осуществления вышеописанного способа управления двигателем, он обладает по крайней мере всеми полезными эффектами, обусловленными техническими решениями вышеуказанных вариантов осуществления, которые здесь не будут повторяться.
[00156] Компьютерно-читаемый носитель может быть внутренним устройством хранения электрической зубной щетки в вышеупомянутых вариантах осуществления, таким как жесткий диск или память. Компьютерно-читаемый носитель может быть внешним устройством хранения электрической зубной щетки, таким как съемный жесткий диск, Smart Media Card (SMC), Secure Digital (SD) карта, Flash Card и т.д.
[00157] Поскольку компьютерная программа, хранящаяся на компьютерно-читаемом носителе, может выполнять любой из вышеописанных способов управления двигателем, предложенных в вариантах осуществления настоящего раскрытия, полезные эффекты, которые могут быть реализованы любым из способов управления двигателем, предложенных в вариантах осуществления настоящего раскрытия, могут быть достигнуты здесь, которые здесь не будут повторяться.
[00158] Вышеуказанное является лишь некоторыми вариантами осуществления настоящего раскрытия и не предназначено для ограничения объема настоящего раскрытия. Любая эквивалентная структура или эквивалентное преобразование процесса, использующее содержание спецификации и сопровождающих чертежей настоящего раскрытия, или прямо или косвенно используемое в других смежных областях техники, включены в объем настоящего раскрытия по той же причине.
[00159] Наконец, следует отметить, что вышеуказанные варианты осуществления предназначены только для иллюстрации технических решений настоящего раскрытия, а не для их ограничения. Хотя настоящее раскрытие было описано подробно со ссылкой на вышеупомянутые варианты осуществления, специалистам в данной области техники следует понимать, что все еще возможны модификации технических решений, зафиксированных в вышеупомянутых вариантах осуществления, или эквивалентные замены некоторых технических характеристик в них. Эти модификации или замены не вызывают отклонения сути технических решений от духа и объема технических решений вариантов осуществления настоящего раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2008 |
|
RU2389447C2 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2009 |
|
RU2493760C2 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2008 |
|
RU2421183C1 |
| ИНТЕРАКТИВНАЯ ЗУБНАЯ ЩЕТКА И СЪЕМНЫЙ МОДУЛЬ ВЫВОДА ЗВУКА | 2008 |
|
RU2469631C2 |
| СИСТЕМА ПРИВОДА ДЛЯ УСТРОЙСТВА ИНДИВИДУАЛЬНОГО УХОДА И СПОСОБ ЕЕ РАБОТЫ | 2015 |
|
RU2705619C2 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2009 |
|
RU2444325C1 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2010 |
|
RU2518532C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МОДУЛЬНЫЙ АМОРТИЗАТОР МОНТАЖНОЙ ОПОРЫ ДВИГАТЕЛЯ | 2015 |
|
RU2676455C2 |
| Головка электрической зубной щётки | 2021 |
|
RU2840186C1 |
| СИСТЕМА УСТАНОВКИ ДВИГАТЕЛЯ В ПОДВЕШЕННОМ СОСТОЯНИИ В ПРИВОДНОЙ ЗУБНОЙ ЩЕТКЕ | 2015 |
|
RU2663644C2 |
Группа изобретений относится к области электрических зубных щеток и предназначена для эффективного и полного очищения полости рта путем управления двигателем электрической зубной щётки. Способ управления двигателем для электрической зубной щётки включает: получение стартового или регулирующего сигнала; управление валом двигателя электрической зубной щётки; получение параметра положения заданной осевой линии колебания вала двигателя; получение параметра максимального положения вибрации в прямом направлении и параметра максимального положения вибрации в обратном направлении вала двигателя; определение параметра положения заданной осевой линии колебания электрической зубной щётки; управление заданной осевой линией колебания вала двигателя; управление, в режиме колебания, заданной осевой линией колебания электрической зубной щётки и управление, в режиме вращения, заданной осевой линией колебания электрической зубной щётки для вращения на 360 градусов вокруг оси вала двигателя. При этом электрическая зубная щётка включает: двигатель, память, программу, настроенную для выполнения программы для осуществления управления двигателем, процессор. При этом для управления двигателем для электрической зубной щётки используют устройство, включающее модули. Способы, за счет различных углов и режимов колебания вала двигателя электрической зубной щетки вокруг его оси, обеспечивают эффективную и всестороннюю очистку полости рта, удовлетворяя потребности различных пользователей в чистке различных частей полости рта. 6 н. и 16 з.п. ф-лы, 13 ил.
1. Способ управления двигателем для электрической зубной щётки, включающий:
- получение стартового или регулирующего сигнала;
- управление валом двигателя электрической зубной щётки для вибрации с заданной частотой относительно заданной осевой линии колебания в соответствии со стартовым или регулирующим сигналом;
- получение параметра положения заданной осевой линии колебания вала двигателя электрической зубной щётки, при этом получение параметра положения заданной осевой линии колебания вала двигателя электрической зубной щётки включает:
- получение параметра максимального положения вибрации в прямом направлении и параметра максимального положения вибрации в обратном направлении вала двигателя электрической зубной щётки вокруг оси через датчик Холла в соответствии со стартовым или регулирующим сигналом;
- определение параметра положения заданной осевой линии колебания электрической зубной щётки в соответствии с параметром максимального положения вибрации в прямом и обратном направлениях; и
- управление заданной осевой линией колебания вала двигателя электрической зубной щётки для перемещения вокруг оси вала двигателя по заданной траектории, при этом управление заданной осевой линией колебания вала двигателя электрической зубной щётки включает:
- в режиме колебания управление заданной осевой линией колебания электрической зубной щётки для колебания на заданный угол вокруг оси вала двигателя в прямом и обратном направлениях, при этом заданный угол составляет не менее 10 градусов и не более 60 градусов; и/или
- в режиме вращения управление заданной осевой линией колебания электрической зубной щётки для вращения на 360 градусов вокруг оси вала двигателя.
2. Способ управления двигателем по п. 1, в котором управление заданной осевой линией колебания вала двигателя электрической зубной щётки для перемещения вокруг оси вала двигателя по заданной траектории включает:
- управление заданной осевой линией колебания вала двигателя электрической зубной щётки для колебания вокруг оси вала двигателя в прямом и обратном направлениях с заданной частотой;
при этом соотношение заданной частоты вибрации вала двигателя к заданной частоте прямого и обратного возвратно-поступательного колебания заданной осевой линии колебания вала двигателя вокруг оси вала двигателя составляет не менее 60.
3. Способ управления двигателем по п. 1, в котором управление валом двигателя электрической зубной щётки для вибрации с заданной частотой относительно заданной осевой линии колебания в соответствии со стартовым или регулирующим сигналом включает:
- управление валом двигателя электрической зубной щётки для вибрации с заданной частотой вибрации и заданным углом вибрации относительно заданной осевой линии колебания через управление вектором магнитного поля (FOC);
при этом управление заданной осевой линией колебания вала двигателя электрической зубной щётки для перемещения вокруг оси вала двигателя по заданной траектории включает:
- управление заданной осевой линией колебания вала двигателя электрической зубной щётки для вращения вокруг оси вала двигателя с заданным углом колебания и заданной скоростью колебания через FOC.
4. Способ управления двигателем по любому из пп. 1-3, до получения стартового или регулирующего сигнала, дополнительно включающий:
- получение сигнала подготовки калибровки двигателя, управление валом двигателя для прекращения вибрации и снятие контроля с двигателя посредством клавиши так, чтобы вал двигателя мог вращаться вокруг оси под действием внешней силы;
- отправку сигнала начала калибровки двигателя в ответ на вращение вала двигателя до тех пор, пока заданная осевая линия колебания не совпадёт с вертикальной осевой линией клавиши электрической зубной щётки в радиальном направлении вала двигателя;
- получение сигнала начала калибровки двигателя; получение текущего положения заданной осевой линии колебания вала двигателя электрической зубной щётки в соответствии с сигналом начала калибровки двигателя и определение текущего положения заданной осевой линии колебания вала двигателя как заданного начального положения; и
- получение сигнала калибровки головки щётки; и управление заданной осевой линией колебания вала двигателя электрической зубной щётки для вращения к заданному начальному положению в соответствии с сигналом калибровки головки щётки.
5. Способ управления двигателем по любому из пп. 1-3, в котором управление заданной осевой линией колебания вала двигателя электрической зубной щётки для перемещения вокруг оси вала двигателя по заданной траектории включает:
- получение сигнала очистки передних зубов или сигнала очистки задних зубов; и управление заданной осевой линией колебания электрической зубной щётки для колебания вокруг оси вала двигателя в прямом и обратном направлениях с частотой колебания, соответствующей сигналу очистки передних зубов или сигналу очистки задних зубов.
6. Способ управления двигателем по п. 5, в котором после получения параметра положения заданной осевой линии колебания вала двигателя электрической зубной щётки и до получения сигнала очистки передних зубов или сигнала очистки задних зубов; и управления заданной осевой линией колебания электрической зубной щётки для колебания вокруг оси вала двигателя в прямом и обратном направлениях с частотой колебания, соответствующей сигналу очистки передних зубов или сигналу очистки задних зубов, способ управления двигателем дополнительно включает:
- определение текущего параметра ширины зуба, соответствующего головке щётки электрической зубной щётки, распознавание типа зуба на основе текущего параметра ширины зуба и отправку сигнала очистки передних зубов или сигнала очистки задних зубов в соответствии с типом зуба.
7. Устройство управления двигателем для электрической зубной щётки, включающее:
- первый модуль получения, настроенный для получения стартового или регулирующего сигнала;
- первый модуль управления, настроенный для управления валом двигателя электрической зубной щётки для вибрации с заданной частотой относительно заданной осевой линии колебания в соответствии со стартовым или регулирующим сигналом;
- второй модуль получения, настроенный для получения параметра положения заданной осевой линии колебания вала двигателя электрической зубной щётки; и
- второй модуль управления, настроенный для управления заданной осевой линией колебания вала двигателя электрической зубной щётки для перемещения вокруг оси вала двигателя по заданной траектории.
8. Устройство управления двигателем по п. 7, дополнительно включающее:
- датчик Холла, настроенный для получения параметра максимального положения вибрации в прямом направлении и параметра максимального положения вибрации в обратном направлении вала двигателя электрической зубной щётки вокруг оси в соответствии со стартовым или регулирующим сигналом, и определения параметра положения заданной осевой линии колебания электрической зубной щётки в соответствии с параметром максимального положения вибрации в прямом направлении и параметром максимального положения вибрации в обратном направлении.
9. Устройство управления двигателем по п. 7, в котором второй модуль управления настроен для управления заданной осевой линией колебания электрической зубной щётки в режиме колебания для колебания на заданный угол вокруг оси вала двигателя в прямом и обратном направлениях, при этом заданный угол составляет не менее 10 градусов и не более 60 градусов; и/или
- второй модуль управления настроен для управления заданной осевой линией колебания электрической зубной щётки в режиме вращения для вращения на 360 градусов вокруг оси вала двигателя.
10. Устройство управления двигателем по п. 7, в котором второй модуль управления настроен для управления заданной осевой линией колебания вала двигателя электрической зубной щётки для колебания вокруг оси вала двигателя в прямом и обратном направлениях с заданной частотой; при этом соотношение заданной частоты вибрации вала двигателя к заданной частоте прямого и обратного возвратно-поступательного колебания заданной осевой линии колебания вала двигателя вокруг оси вала двигателя составляет не менее 60.
11. Устройство управления двигателем по п. 7, в котором первый модуль управления настроен для управления валом двигателя электрической зубной щётки для вибрации с заданной частотой вибрации и заданным углом вибрации относительно заданной осевой линии колебания через управление вектором магнитного поля (FOC);
- второй модуль управления настроен для управления заданной осевой линией колебания вала двигателя электрической зубной щётки для вращения вокруг оси вала двигателя с заданным углом колебания и заданной скоростью колебания через FOC.
12. Устройство управления двигателем по любому из пп. 7-11, дополнительно включающее:
- третий модуль получения, настроенный для приёма сигнала подготовки калибровки двигателя;
- третий модуль управления, настроенный для управления валом двигателя для прекращения вибрации и снятия контроля с двигателя посредством клавиши так, чтобы вал двигателя мог вращаться вокруг оси под действием внешней силы; и отправку сигнала начала калибровки двигателя в ответ на вращение вала двигателя до тех пор, пока заданная осевая линия колебания не совпадёт с вертикальной осевой линией клавиши электрической зубной щётки в радиальном направлении вала двигателя;
- четвёртый модуль получения, настроенный для приёма сигнала начала калибровки двигателя;
- четвёртый модуль управления, настроенный для получения текущего положения заданной осевой линии колебания вала двигателя электрической зубной щётки в соответствии с сигналом начала калибровки двигателя и определения текущего положения заданной осевой линии колебания вала двигателя как заданного начального положения;
- пятый модуль получения, настроенный для приёма сигнала калибровки головки щётки; и
- пятый модуль управления, настроенный для управления заданной осевой линией колебания вала двигателя электрической зубной щётки для вращения к заданному начальному положению в соответствии с сигналом калибровки головки щётки.
13. Устройство управления двигателем по любому из пп. 7-11, дополнительно включающее:
- шестой модуль получения, настроенный для приёма сигнала очистки передних зубов или сигнала очистки задних зубов; и
- шестой модуль управления, настроенный для управления заданной осевой линией колебания электрической зубной щётки для колебания вокруг оси вала двигателя в прямом и обратном направлениях с частотой колебания, соответствующей сигналу очистки передних зубов или сигналу очистки задних зубов.
14. Устройство управления двигателем по п. 13, дополнительно включающее:
- модуль получения, настроенный для определения текущего параметра ширины зуба, соответствующего головке щётки электрической зубной щётки; и
- модуль распознавания, настроенный для распознавания типа зуба на основе текущего параметра ширины зуба и отправки сигнала очистки передних зубов или сигнала очистки задних зубов в соответствии с типом зуба.
15. Электрическая зубная щётка, включающая: двигатель, память, процессор и программу, хранящуюся в памяти; при этом процессор настроен для выполнения программы для осуществления способа управления двигателем по любому из пп. 1-6.
16. Система управления, включающая электрическую зубную щётку по п. 15 и мобильный управляющий модуль, беспроводно подключенный к электрической зубной щётке; при этом мобильный управляющий модуль включает приложение для взаимодействия с электрической зубной щёткой и мобильный терминал для поддержки работы приложения;
- приложение предоставляет интерфейс для получения внешнего управления, и приложение настроено для создания команды управления двигателем на основе внешнего управления и отправки команды управления двигателем на электрическую зубную щётку; электрическая зубная щётка настроена для получения команды управления двигателем и управления работой двигателя.
17. Система управления по п. 16, в которой электрическая зубная щетка подключена к мобильному управляющему модулю через модуль беспроводной связи для вывода параметра работы двигателя; приложение настроено для вывода команды управления двигателем на основе внешнего управления для изменения параметра работы двигателя, и электрическая зубная щётка настроена для получения команды управления двигателем и работы в соответствии с измененным параметром работы двигателя.
18. Система управления по п. 17, в которой параметр работы двигателя включает: частоту вибрации, с которой вал двигателя электрической зубной щётки вибрирует вокруг оси относительно заданной осевой линии колебания, скорость колебания, с которой заданная осевая линия колебания вала двигателя электрической зубной щётки перемещается вокруг оси вала двигателя по заданной траектории, и угол, под которым заданная осевая линия колебания электрической зубной щётки вращается вокруг оси вала двигателя.
20. Плата управления для электрической зубной щётки, включающая:
- модуль переключения, настроенный для вывода сигнала переключения;
- модуль регулировки, настроенный для вывода сигнала регулировки параметров двигателя;
- датчик Холла, настроенный для определения параметра положения заданной осевой линии колебания вала двигателя электрической зубной щётки; и
- контроллер; при этом входной конец контроллера электрически подключён к модулю переключения и модулю регулировки, а выходной конец контроллера электрически подключён к двигателю электрической зубной щётки;
при этом контроллер настроен для получения стартового или регулирующего сигнала и управления валом двигателя электрической зубной щётки для вибрации с заданной частотой относительно заданной осевой линии колебания в соответствии со стартовым или регулирующим сигналом; контроллер также настроен для управления заданной осевой линией колебания вала двигателя электрической зубной щётки для перемещения вокруг оси вала двигателя по заданной траектории.
21. Носитель информации, не являющийся временным, настроенный для хранения программы управления двигателем для электрической зубной щётки; при этом программа управления двигателем исполняема процессором для выполнения способа управления двигателем по любому из пп. 1-6.
| CN 111150515 B, 07.02.2021 | |||
| US 20100132139 A1, 03.06.2010 | |||
| KR 101716605 B1, 14.03.2017 | |||
| US 8341791 B2, 01.01.2013 | |||
| JP 6925343 B2, 25.08.2021 | |||
| US 5378153 A, 03.01.1995 | |||
| US 2011010874 A1, 20.01.2011. |

