Изобретение относится к преобразовательной технике и может быть использовано для управления сетевым инвертором напряжения (СИН) в составе источника распределенной генерации (ИРГ).
Классический СИН, применяемый в составе ИРГ в настоящее время, характеризуется крайне низким инерционным откликом, высокой чувствительности к колебаниям напряжения сети, склонностью к синхронным качаниям, над синхронному и под синхронному резонансам, а также отсутствием возможности работы в автономной сети.
С целью устранения данных недостатков предложены способы управления СИН, основанные на решении системы уравнений виртуальной синхронной машины (ВСМ):
- Патент CN 111668859A (Wei Yalong «Control method and system for virtual synchronous generator with unbalanced load»);
- Патент CN 115207973A (Yang Zhichun, Yang Fan, Liu Zhaoxun, Liu Kaipei, Shen Yu, Min Huaidong, Hu Wei, Xiang Yang, Yang Shiqi, Deng Xinlan, Zhang Changwen, Qin Liang, Lei Yang, Su Lei « Virtual synchronous machine adaptive operation mode switching method for improving grid-connected stability »);
- Патент CN 108923468A (Qiu Yufeng, He Zhiyuan, Wang Huafeng, Lin Zhiguang, Zhang Haifeng, Zhang Jian «Virtual synchronous machine seamless smooth switching method and system»).
Представленные способы имеют два существенных недостатка: взаимовлияние активной и реактивной выходной мощности, присущее традиционной синхронной машине, а также ухудшение гармонического состава выходной электроэнергии в сравнении с классическим СИН.
Способ управления по патенту CN 116799853A (Yin Quan; Ju Binlei; Fu Yuqi; Yin Qichen «Power decoupling method and control system of virtual synchronous machine») предусматривает устранение взаимовлияния выходных мощностей путём компенсации перекрёстных связей, однако этот способ ведет к усложнению и без того разветвленной структуры системы управления.
Наиболее близким к предлагаемому изобретению является способ управления сетевым инвертором напряжения в составе источника распределённой генерации по патенту CN 111628506A (Lyu Zhipeng, Wu Ming; Sun Lijing, Song Zhenhao, Zhao Ting; Zhou Shan; Liu Guoyu «Load virtual synchronous machine control method and system»), заключающийся в непрерывном измерении мгновенных значений выходных токов и напряжений инвертора, преобразовании их в декартову систему координат, последующем регулировании выходных токов и определении угла поворота системы координат путём решения уравнения движения виртуальной синхронной машины, причем заданные значения токов определяют из уравнения ЭДС синхронной машины в осях 0dq. Однако и этот способ обладает двумя указанными выше недостатками.
Проблемой, которую решает изобретение, является исключение взаимовлияния выходных активной и реактивной мощностей СИН на базе виртуальной синхронной машины, а также улучшения качества регулирования выходных переменных и гармонического состава выходной электроэнергии.
Решение указанной проблемы достигается тем, что заданные значения токов  и
и  для регуляторов тока СИН определяют не с помощью решения уравнений электрического равновесия синхронной машины, а непосредственным вычислением из задания на выходную активную
для регуляторов тока СИН определяют не с помощью решения уравнений электрического равновесия синхронной машины, а непосредственным вычислением из задания на выходную активную  и реактивную
и реактивную  составляющие мощности инвертора с учетом измеренных значений напряжения на выходе
составляющие мощности инвертора с учетом измеренных значений напряжения на выходе  ,
,  :
:
 , (1)
, (1)
 , (2)
, (2)
 ,
,
 .
.
При этом основные составляющие задания на выходную  - активную и
- активную и  - реактивную мощность инвертора, о.е., необходимые для поддержания заданного значения выходной частоты и амплитуды напряжения, определяют регулятор частоты и регулятор амплитуды выходного напряжения, соответственно:
- реактивную мощность инвертора, о.е., необходимые для поддержания заданного значения выходной частоты и амплитуды напряжения, определяют регулятор частоты и регулятор амплитуды выходного напряжения, соответственно:
 , (3)
, (3)
 , (4)
, (4)
где  ,
,  - коэффициенты усиления регулятора частоты и амплитуды выходного напряжения, соответственно;
- коэффициенты усиления регулятора частоты и амплитуды выходного напряжения, соответственно;  ,
,  - заданное значение выходной частоты и амплитуды напряжения сети, о.е.; , - значения выходной активной и реактивной мощности ВСМ, необходимые для поддержания заданной частоты и амплитуды напряжения, о.е.;
- заданное значение выходной частоты и амплитуды напряжения сети, о.е.; , - значения выходной активной и реактивной мощности ВСМ, необходимые для поддержания заданной частоты и амплитуды напряжения, о.е.;  - измеренное значение амплитуды напряжения сети после фильтрации гармоник высокого порядка, о.е.;
- измеренное значение амплитуды напряжения сети после фильтрации гармоник высокого порядка, о.е.;  - текущая частота вращения виртуального ротора ВСМ, о.е.
- текущая частота вращения виртуального ротора ВСМ, о.е.
Помимо этого, непрерывно оценивают запас мощности инвертора и, при его наличии, формируют дополнительные составляющие задания на выходную активную  и реактивную
и реактивную  мощность, суммируя их с выходами регуляторов частоты и амплитуды напряжения, соответственно:
мощность, суммируя их с выходами регуляторов частоты и амплитуды напряжения, соответственно:
 , (5)
, (5)
 , (6)
, (6)
где  - доступная к передаче в сеть от звена постоянного тока полная мощность инвертора, о.е.;
- доступная к передаче в сеть от звена постоянного тока полная мощность инвертора, о.е.;  - заданный передаваемой в сеть мощности, незадействованной регуляторами частоты и амплитуды выходного напряжения.
- заданный передаваемой в сеть мощности, незадействованной регуляторами частоты и амплитуды выходного напряжения.
Для улучшения качества выходной электроэнергии ПИ-регуляторы тока заменяют на регуляторы скользящего режима:
 , (7)
, (7)
 , (8)
, (8)
где  ,
,  - измеренное значение напряжения на выходном фильтре инвертора в проекциях на оси 0dq;
- измеренное значение напряжения на выходном фильтре инвертора в проекциях на оси 0dq;  ,
,  - заданное значение напряжения на выходе инвертора (перед фильтром) в проекциях на оси 0dq;
- заданное значение напряжения на выходе инвертора (перед фильтром) в проекциях на оси 0dq;  - измеренное значение напряжения на звене постоянного тока, о.е.;
- измеренное значение напряжения на звене постоянного тока, о.е.;  ,
,  - коэффициент функции переключения;
- коэффициент функции переключения;  ,
,  - коэффициенты усиления, определяющие наклон поверхностей скольжения, о.е.;
- коэффициенты усиления, определяющие наклон поверхностей скольжения, о.е.;  - индуктивность выходного фильтра СИН, о.е.;
- индуктивность выходного фильтра СИН, о.е.;  ,
,  - текущие значения точек на поверхностях скольжения, определяемые по выражениям:
- текущие значения точек на поверхностях скольжения, определяемые по выражениям:
 , (9)
, (9)
 , (10)
, (10)
где ,  - заданное и измеренное текущее значение тока по оси 0d, o.e.; ,
- заданное и измеренное текущее значение тока по оси 0d, o.e.; ,  - заданное и измеренное текущее значение тока по оси 0q, соответственно.
- заданное и измеренное текущее значение тока по оси 0q, соответственно.
При использовании регуляторов скользящего режима улучшается не только гармонический состав, но и качество регулирования контролируемых переменных в статических режимах работы.
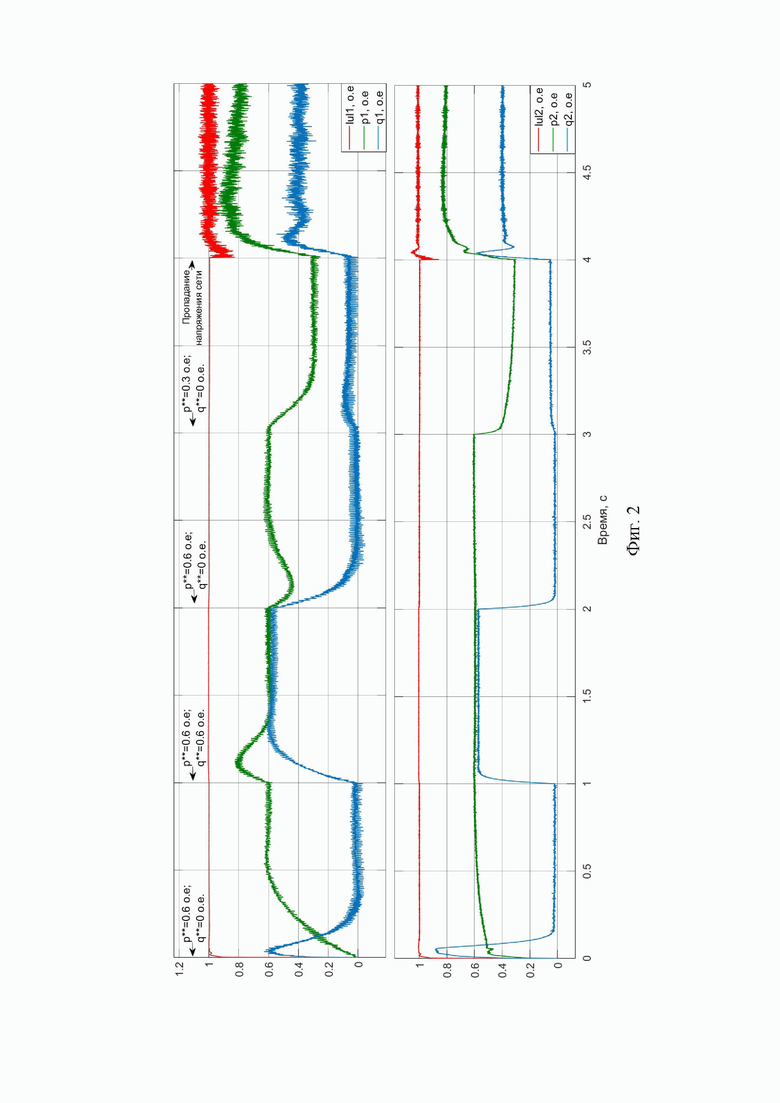
Способ поясняется чертежом на фиг. 1, где изображена структурная схема системы управления, реализующей изобретение, а также временной диаграммой на фиг. 2, полученной при компьютерном моделировании представленной системы, иллюстрирующей процесс управления по предлагаемому способу.
На фиг. 1 показаны: 1 - блок широтно-импульсной модуляции; 2 - блок преобразования Кларка/Парка; 3 - блок регуляторов тока; 4 - блок решения уравнения движения синхронной машины; 5 - блок вычисления текущей выходной активной мощности; 6 - блок фазовой-автоподстройки частоты; 7 - блок вычисления задающих воздействий для регуляторов тока; 8, 9 - блоки регуляторов частоты и амплитуды выходного напряжения, соответственно; 10 - блок вычисления амплитуды вектора выходного напряжения; Rф, Lф, Cф - активное сопротивление, индуктивность и емкость выходного фильтра СИН; Rн, Lн, Eн - активное сопротивление, индуктивность и ЭДС нагрузки; C - емкость конденсатора звена постоянного тока; T1 - силовой трансформатор питающей сети.
Электрический генератор и выпрямитель, входящие в состав источника распределенной генерации, на схеме не показаны. Полная мощность нагрузки при проведении компьютерного моделирования была принята равной полной мощности инвертора.
На фиг. 2 показаны графики выходных активной и реактивной мощности и амплитуды напряжения на выходе СИН с существующей (верхний) и предлагаемой (нижний) системой управления ВСМ. Графики выходных мощностей позволяют наблюдать выдачу заданной активной и реактивной мощности при подключении к системе электроснабжения, а также наличие - в существующей системе управления, или отсутствие - в системе управления по предлагаемому способу, их взаимовлияния. Небольшое влияние на значение выходной реактивной мощности в предлагаемой системе управления можно заметить при уменьшении выходной активной мощности до p**=0,3 о.е. ввиду небольшого падения напряжения в сети и изменения значения выхода регулятора напряжения.
Технический результат, обеспечиваемый изобретением, заключается в исключении взаимовлияния выходной активной и реактивной мощности ВСМ, а также улучшения качества регулирования и гармонического состава выходной электроэнергии СИН.

Изобретение относится к преобразовательной технике и может быть использовано для управления сетевым инвертором напряжения в составе источника распределенной генерации. Технический результат, обеспечиваемый изобретением, заключается в исключении взаимовлияния выходной активной и реактивной мощности, а также улучшении качества регулирования и гармонического состава выходной электроэнергии сетевого инвертора напряжения, построенного на базе виртуальной синхронной машины. Технический результат достигается за счет того, что способ управления сетевым инвертором основан на непрерывной регистрации мгновенных значений выходных токов и напряжений на выходе инвертора, преобразовании их в декартову систему координат, последующем регулировании выходных токов и определении угла поворота системы координат путём решения уравнения движения виртуальной синхронной машины. Небаланс мощностей в виртуальной синхронной машине определяют из разницы заданной и текущей выходной активной мощности, а также демпфирующей силы, обусловленной разницей частоты вращения виртуального ротора и частоты напряжения сети, фиксируемой фазовой автоподстройкой частоты. Заданные значения токов определяют на основе выходной мощности инвертора, необходимой для поддержания амплитуды и частоты напряжения сети, а также дополнительной выходной активной и реактивной мощности при наличии запаса мощности инвертора. 2 з.п. ф-лы, 2 ил.
1. Способ управления сетевым инвертором напряжения в составе источника распределённой генерации, заключающийся в непрерывном измерении мгновенных значений выходных токов и напряжений инвертора, преобразовании их в декартову систему координат, последующем регулировании выходных токов и определении угла поворота системы координат путём решения уравнения движения виртуальной синхронной машины, отличающийся тем, что заданные значения выходных токов  и
и  определяют на основе необходимой для поддержания амплитуды и частоты напряжения сети выходной мощности инвертора, включающей активную
определяют на основе необходимой для поддержания амплитуды и частоты напряжения сети выходной мощности инвертора, включающей активную  и реактивную
и реактивную  составляющие, которые формируют регуляторами частоты и амплитуды выходного напряжения инвертора, при этом непрерывно оценивают запас мощности инвертора и, при его наличии, формируют дополнительные составляющие выходной активной
составляющие, которые формируют регуляторами частоты и амплитуды выходного напряжения инвертора, при этом непрерывно оценивают запас мощности инвертора и, при его наличии, формируют дополнительные составляющие выходной активной  и реактивной
и реактивной  мощности.
мощности.
2. Способ по п.1, отличающийся тем, что дополнительные составляющие выходной активной p** и реактивной q** мощности определяют на основании незадействованной мощности инвертора по выражениям:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
где  ,
,  – измеренные значения напряжений на выходном фильтре, о.е;
– измеренные значения напряжений на выходном фильтре, о.е;  ,
,  – суммарная заданная выходная активная и реактивная мощность, о.е;
– суммарная заданная выходная активная и реактивная мощность, о.е;  ,
,  – коэффициенты усиления регуляторов частоты и амплитуды выходного напряжения, соответственно;
– коэффициенты усиления регуляторов частоты и амплитуды выходного напряжения, соответственно;  ,
,  – заданное значение выходной частоты и амплитуды напряжения сети, о.е;
– заданное значение выходной частоты и амплитуды напряжения сети, о.е;  – измеренное значение амплитуды напряжения сети после фильтрации гармоник высокого порядка, о.е.;
– измеренное значение амплитуды напряжения сети после фильтрации гармоник высокого порядка, о.е.;  – текущая частота вращения ротора виртуальной синхронной машины;
– текущая частота вращения ротора виртуальной синхронной машины;  – доступная к передаче в сеть от звена постоянного тока полная мощность инвертора, о.е;
– доступная к передаче в сеть от звена постоянного тока полная мощность инвертора, о.е;  – заданный передаваемой в сеть мощности, незадействованной регуляторами частоты и амплитуды выходного напряжения.
– заданный передаваемой в сеть мощности, незадействованной регуляторами частоты и амплитуды выходного напряжения.
3. Способ по п.1, отличающийся тем, что для управления токами используют регуляторы скользящего типа:
 ,
,
 ,
,
где  ,
,  – измеренное значение напряжения на выходном фильтре инвертора в проекциях на оси 0dq;
– измеренное значение напряжения на выходном фильтре инвертора в проекциях на оси 0dq;  ,
,  – заданное значение напряжения на выходе инвертора (перед фильтром) в проекциях на оси 0dq;
– заданное значение напряжения на выходе инвертора (перед фильтром) в проекциях на оси 0dq;  – измеренное значение напряжения на звене постоянного тока, о.е;
– измеренное значение напряжения на звене постоянного тока, о.е;  ,
,  – коэффициент функции переключения;
– коэффициент функции переключения;  ,
,  – коэффициенты усиления, определяющие наклон поверхностей скольжения, о.е;
– коэффициенты усиления, определяющие наклон поверхностей скольжения, о.е;  – индуктивность выходного фильтра сетевого инвертора напряжения, о.е;
– индуктивность выходного фильтра сетевого инвертора напряжения, о.е;  ,
,  – текущие значения точек на поверхностях скольжения, определяемые по выражениям:
– текущие значения точек на поверхностях скольжения, определяемые по выражениям:
 ,
,
где ,  – заданное и измеренное текущее значение тока по оси 0d, o.e; ,
– заданное и измеренное текущее значение тока по оси 0d, o.e; ,  – заданное и измеренное текущее значение тока по оси 0q, o.e.
– заданное и измеренное текущее значение тока по оси 0q, o.e.
| CN 111628506 A, 04.09.2020 | |||
| CN 107994620 A, 04.05.2018 | |||
| CN 116799853 A, 22.09.2023 | |||
| CN 115207973 A, 18.10.2022 | |||
| CN 116154842 A, 23.05.2023 | |||
| СПОСОБ ПОДАЧИ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ ПОСРЕДСТВОМ УПРАВЛЯЕМОГО ПРЕОБРАЗОВАТЕЛЕМ ГЕНЕРАТОРНОГО БЛОКА, В ЧАСТНОСТИ, ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2018 |
|
RU2729059C1 |

