Изобретение относится к области электротехники и может быть использовано в составе промышленных реверсивных автоматизированных электропроводов для управления активными двунаправленными преобразователями частоты на базе активных выпрямителей напряжения при компенсации индуктивного или емкостного потребления мощности различными нагрузками в питающей сети.
Из уровня техники известен способ регулирования четырехквадрантного установочного органа, преобразующего трансформированное напряжение конкретной сети в регулируемое постоянное напряжение, работающего от сети и регулирующего активную составляющую тока, который, с одной стороны, питает через промежуточный контур постоянного напряжения и импульсный инвертор электроприводы трехфазного тока, а с другой стороны - через многообмоточный трансформатор, при этом производится регулирование постоянного значения реактивной составляющей тока, отдаваемого всей структурой, а с помощью измерения тока контактной сети непосредственно на токоприемнике учитываются также составляющие реактивного тока в наборе фильтров помех и преобразователей вспомогательных служб, а их влияние на реактивный ток первой гармоники так регулируется посредством четырехквадрантного установочного органа, что суммарно устанавливается желаемое фазовое положение первой гармоники контактной сети (патент РФ №2145726, «Способ регулирования четырехквадрантного установочного органа, выполняющего роль преобразователя тока», МПК G05F 1/70, опубл. 20.02.2000 г.).
Также, из уровня техники известен способ управления четырехквадрантным преобразователем (патент РФ №2315415, «Способ управления четырехвадрантным преобразователем», МПК Н02М 7/797, опубл. 20.01.2008 г.), заключающийся в том, что определяют величину угла сдвига между напряжением источника переменного напряжения и синусоидальным модулирующим сигналом, используя заданное значение угла сдвига между напряжением и током источника переменного напряжения и глубину модуляции.
Недостатками известных способов является трудность расчета желаемого фазового сдвига по первой гармонике и отсутствие возможности регулирования реактивной мощности в питающей сети с различными нелинейными потребителями электрической энергии.
Из уровня техники известен способ управления четырехквадрантным преобразователем электровоза (патент РФ 2464621, «Способ управления четырехвадрантным преобразователем электровоза», МПК G05F 1/70, опубл. 20.10.2012 г.), заключающийся в том, что трансформированное напряжение контактной сети четырехквадрантным преобразователем преобразуют в регулируемое постоянное напряжение, которым питают через емкостной фильтр и автономный инвертор напряжения асинхронный тяговый двигатель, при этом измеряют постоянное напряжение на выходе четырехквадрантного преобразователя, сравнивают его с заданным значением и подают на вход регулятора напряжения, которым формируют заданное значение активной составляющей тока, сравнивают с вычисленным значением активной составляющей тока и подают на вход регулятора активного тока, вычисляют разность между заданием по реактивному току и вычисленным значением реактивной составляющей тока и подают на регулятор реактивного тока, а блоком широтно-импульсной модуляции вырабатывают импульсы управления четырехквадрантным преобразователем, по которым формируют заданное значение выходного постоянного напряжения и устанавливают желаемый фазовый сдвиг между первыми гармониками тока и напряжения контактной сети, измеряют однофазные напряжение первичной и ток вторичной обмотки трансформатора, которые наблюдателями по напряжению и току соответственно преобразуют в двухфазные векторные сигналы в неподвижной системе координат, при этом сигналы с наблюдателя по напряжению нормализатором преобразуют в сигналы единичной амплитуды, по которым совместно с сигналами наблюдателя по току прямым преобразователем координат вычисляют активную и реактивную составляющие тока во вращающейся системе координат, регулирование которых осуществляют по отдельным независимым каналам соответственно регуляторами активного и реактивного токов, выходные сигналы которых совместно с сигналами нормализатора обратным преобразователем координат управляют блоком широтно-импульсной модуляции.
Недостатком известного способа является отсутствие возможности регулирования реактивного тока в зависимости от уровня реактивной мощности в питающей сети, что не позволяет эффективно использовать данный метод управления в сетях с переменным значением уровня реактивной мощности.
В основу настоящего изобретения положена задача создания энергоэффективного способа управления активным двунаправленным преобразователем частоты в составе промышленных реверсивных автоматизированных электропроводов для компенсации индуктивного или емкостного потребления мощности различными нагрузками в питающей сети.
Технический результат заявляемого изобретения заключается в повышении коэффициента мощности, снижении электрических потерь и стабилизации напряжения в питающей сети.
Указанный технический результат достигается за счет того, что в способе управления активным двунаправленным преобразователем частоты с помощью активного выпрямителя напряжения из питающей сети через понижающий трансформатор, промежуточное звено постоянного тока и автономный инвертор напряжения подводят мощность к нагрузке, при этом измеряют напряжение и угол положения пространственного вектора напряжения питающей сети, напряжение в промежуточном звене постоянного тока и ток со вторичной обмотки понижающего трансформатора и формируют сигналы обратных связей, после чего сигнал обратной связи звена постоянного тока вычитается из сигнала задания напряжения постоянного тока и их разность поступает на вход регулятора напряжения, который формирует сигнал задания активного тока, при этом угол положения пространственного вектора напряжения питающей сети и сигналы обратных связей тока со вторичной обмотки трансформатора и напряжения питающей сети передают на преобразователь координат и формируют сигналы обратных связей тока и напряжения во вращающейся системе координат, после чего сигналы обратных связей тока во вращающейся системе координат вычитают из сигналов здания токов и их разность передают на вход двухмерного регулятора тока, который в зависимости от сигнала разности формирует необходимый выходной сигнал для поддержания заданного тока на вторичной обмотке понижающего трансформатора, также сигналы обратных связей тока во вращающейся системе координат передают на компенсатор перекрестных связей и формируют сигналы компенсации перекрестных связей, которые суммируют с сигналами выхода двумерного регулятора тока и сигналами обратных связей напряжения во вращающейся системе координат, после чего полученные сигналы передают на широтно-импульсный модулятор и рассчитывают коэффициент модуляции и угол сдвига выходного фазного напряжения активного выпрямителя напряжения относительно напряжения на вторичной обмотке понижающего трансформатора, после чего сигналы коэффициента модуляции и угла сдвига выходного фазного напряжения активного выпрямителя напряжения передают в устройство формирования сигналов управления, при этом расчет мгновенных значений активной, реактивной и полной мощности, потребляемой или генерируемой активным двунаправленным преобразователем частоты посредством активного выпрямителя напряжения, осуществляют на основе сигналов обратных связей тока и напряжения во вращающейся системе координат и сигнала обратной связи напряжения в промежуточном звене постоянного тока по формулам:




где Рс - активная мощность, Вт; Qc - реактивная мощность, вар; Sc - полная мощность, В⋅А; Ес - действующее фазное напряжение питающей сети, В; ЕАВН - действующее фазное напряжение на выходе активного выпрямителя напряжения 1, В; КШИМ - коэффициент, зависящий от метода управления полупроводниковыми ключами активного выпрямителя напряжения 1; Udc - измеренное напряжение в звене постоянного тока, В; XL - эквивалентное индуктивное сопротивление на входе активного выпрямителя напряжения 1, Ом; R - эквивалентное активное сопротивление на входе активного выпрямителя напряжения 1, Ом; α - угол сдвига выходного фазного напряжения, эл. градусы; m - коэффициент модуляции,
производят расчет величины ограничения реактивной мощности по формуле:
где Qогр - ограничение реактивной мощности, вар; Рс - активная мощность, Вт; Smax – максимально возможная передаваемая полная мощность в системе «активный выпрямитель напряжения 1 - питающая сеть 3, В⋅А,
и формируют сигнал задания реактивного тока по формуле:
где iqз - задающий сигнал реактивного тока, о.е.; Qогр - ограничение реактивной мощности, о.е.; udосн - номинальное напряжение питающей сети, о.е.
За счет указанной совокупности существенных признаков обеспечивается возможность регулирования уровня реактивной мощности в питающей сети в зависимости от рассчитанных величин мгновенных значений активной, реактивной, полной мощности и ограничения по передаваемой максимально возможной реактивной мощности.
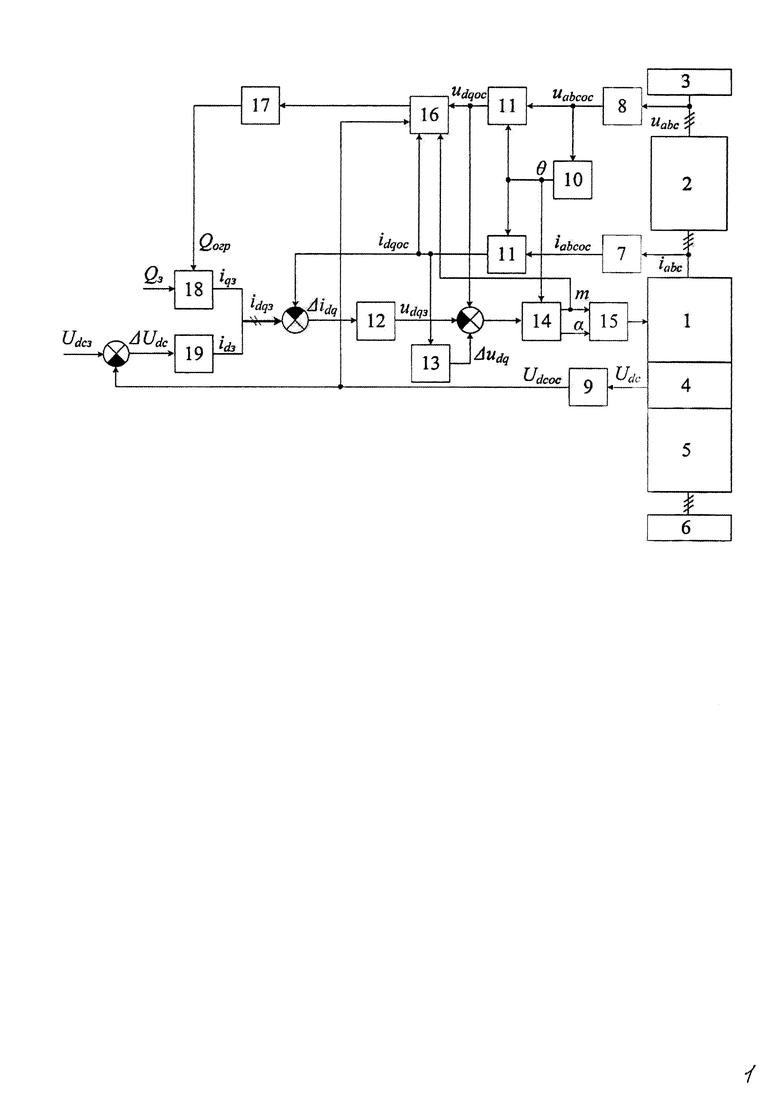
Сущность изобретения поясняется графическим материалом, где на чертеже представлена функциональная схема системы автоматического управления активным двунаправленным преобразователем частоты с помощью активного выпрямителя напряжения.
Функциональная схема активного двунаправленного преобразователя частоты (см. чертеж) содержит активный выпрямитель напряжения 1, состоящий из полностью управляемых полупроводниковых приборов и подключенный через понижающий трансформатор 2 к питающей сети 3, а через промежуточное звено постоянного тока 4 соединенный с автономным инвертором напряжения 5, к которому подключена нагрузка 6. Активный выпрямитель напряжения 1 также содержит датчик переменного тока 7, подключенный ко вторичной обмотке понижающего трансформатора 2, датчик переменного напряжения 8, подключенный к первичной обмотке понижающего трансформатора 2, датчик постоянного напряжения 9, подключенный к промежуточному звену постоянного тока 4, устройство синхронизации 10, подключенное через датчик переменного напряжения 8 к первичной обмотке понижающего трансформатора 2.
Также, на чертеже представлена система автоматического управления активным двунаправленным преобразователем частоты с помощью активного выпрямителя напряжения 1, реализующая предложенный способ управления, которая содержит блок преобразования координат 11, ко входам которого подключены информационный выход датчика переменного тока 7, информационный выход датчика переменного напряжения 8 и информационный выход устройства синхронизации 10. Также система автоматического управления содержит двухмерный регулятор тока 12, выход которого соединяется с выходом блока компенсатора перекрестных связей 13 и сигналами переменного напряжения с выхода преобразователя координат, которые после арифметического сложения соединяются с широтно-импульсным модулятором 14, выходы которого соединяются с устройством формирования сигналов управления 15, которое соединяет силовую схему активного выпрямителем напряжения 1 с системой автоматического управления. Также система автоматического управления содержит блок математической обработки сигналов 16, входы которого соединяются с выходами блока преобразования координат 11, выходом широтно-импульсного модулятора 14 и информационным выходом датчика постоянного напряжения 9. Также система автоматического управления содержит блок ограничения передаваемой максимально возможной реактивной мощности 17, вход которого соединяется с выходом блока математической обработки сигналов 16, блок зависимого ограничения величины задающего сигнала реактивной мощности 18, вход которого соединяется с выходом блока ограничения передаваемой максимально возможной реактивной мощности 17, регулятор постоянного напряжения 19, выход которого соединяется с выходом блока зависимого ограничения реактивной мощности 18, которые после арифметического сложения с информационными выходами преобразователя координат 11 соединяются со входом двухмерного регулятора тока 12.
Предлагаемый способ управления активным двунаправленным преобразователем частоты для реверсивных автоматизированных электроприводов реализован следующим образом (см. чертеж).
Активный выпрямитель напряжения 1 из питающей сети 3 через понижающий трансформатор 2, промежуточное звено постоянного тока 4 и автономный инвертор напряжения 5 подводит мощность к нагрузке 6. Датчик тока 7 измеряет в силовой цепи ток iabc со вторичной обмотки понижающего трансформатора 2 и формирует сигналы обратных связей iabcoc, датчик переменного напряжения 8 измеряет напряжение питающей сети uabc и формирует сигналы обратных связей uаbcoc, датчик постоянного напряжения 9 измеряет напряжение Udc в промежуточном звене постоянного тока 4 и формирует сигнал обратной связи Udcoc.
Сигналы обратных связей uаbcoc поступают в устройство синхронизации 10, где вычисляется угол положения пространственного вектора напряжения θ питающей сети 3. Угол θ и сигналы обратных связей iabcoc и uabcoc поступают на преобразователь координат 11, где после математических преобразований формируются сигналы обратных связей тока idqoc и напряжения udoc во вращающейся системе координат. Сигналы idqoc вычитаются из сигналов задания токов idqз и их разности Δidq поступают на вход двухмерного регулятора тока 12. На компенсатор перекрестных связей 13 поступают сигналы idqoc, где после математических преобразований формируются сигналы Δudq, которые суммируются с сигналами udqз выхода двухмерного регулятора тока 12 и сигналами обратных связей udqoc.
После суммирования полученные сигналы поступают в широтно-импульсный модулятор 14 для расчета коэффициента модуляции m и угла сдвига α выходного фазного напряжения активного выпрямителя 1 относительно напряжения на вторичной обмотке понижающего трансформатора 2. Далее сигналы m и α поступают в устройство формирования сигналов управления 15 активного выпрямителя напряжения 1.
Расчет мгновенных значений активной, реактивной и полной мощности, потребляемой или генерируемой активным двунаправленным преобразователем частоты посредством активного выпрямителя напряжения 1, осуществляется на основе сигналов idqoc, udqoc, m и Udcoc в блоке математической обработки сигналов 16 по формулам:




где Рс - активная мощность, Вт; Qc - реактивная мощность, вар; Sc - полная мощность, В⋅А; Ес - действующее фазное напряжение питающей сети, В; ЕАВН - действующее фазное напряжение на выходе активного выпрямителя напряжения 1, В; КШИМ - коэффициент, зависящий от метода управления полупроводниковыми ключами активного выпрямителя напряжения 1; Udc - измеренное напряжение в звене постоянного тока, В; XL - эквивалентное индуктивное сопротивление на входе активного выпрямителя напряжения 1, Ом; R - эквивалентное активное сопротивление на входе активного выпрямителя напряжения 1, Ом; α - угол сдвига выходного фазного напряжения, эл. градусы; m - коэффициент модуляции.
Блок ограничения передаваемой максимально возможной реактивной мощности 17 осуществляет расчет величины ограничения реактивной мощности Qогр, которая посредством активного выпрямителя напряжения 1 может быть передана в питающую сеть 3 по формуле:

где Qогр - ограничение реактивной мощности, вар; Рс - активная мощность, Вт; Smax – максимально возможная передаваемая полная мощность в системе «активный выпрямитель напряжения 1 - питающая сеть 3, В⋅А.
Блок зависимого ограничения реактивной мощности 18 ограничивает задающий сигнал реактивной мощности Qз и формирует сигнал задания реактивного тока iqз. Сигнал Udcoc вычитается из сигнала задания напряжения постоянного тока Udсз и их разность ΔUdc поступает на вход регулятора напряжения 19, который формирует сигнал задания активного тока idз по формуле:

где iqз - задающий сигнал реактивного тока, о.е.; Qогр - ограничение реактивной мощности, о.е.; udосн - номинальное напряжение питающей сети, о.е.
Предлагаемый способ управления активным двунаправленным преобразователем частоты может быть использован в металлургической, трубопрокатной, нефтяной и газовой промышленности в системах мощных реверсивных автоматизированных электроприводов низкого и среднего напряжения. Данный способ управления реализован на опытном образце и опробован на главном реверсивном электроприводе прокатной клети толстолистового стана металлургического предприятия, показав свою надежность и эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ В СОСТАВЕ СИСТЕМЫ ГЕНЕРИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПЕРЕМЕННОГО ТОКА | 2000 |
|
RU2207698C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРЕХФАЗНЫМИ ТРЕХУРОВНЕВЫМИ АКТИВНЫМИ ВЫПРЯМИТЕЛЯМИ НАПРЯЖЕНИЯ | 2020 |
|
RU2734554C1 |
| Устройство управления высоковольтным преобразователем частоты с активным выпрямителем | 2022 |
|
RU2793193C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРОВОЗА | 2011 |
|
RU2464621C1 |
| Устройство управления высоковольтным преобразователем частоты | 2018 |
|
RU2699374C1 |
| ПРЕОБРАЗОВАТЕЛЬНЫЙ КОМПЛЕКС ЭЛЕКТРОСНАБЖЕНИЯ СОБСТВЕННЫХ НУЖД ТЕПЛОВОЗА | 2014 |
|
RU2556236C1 |
| СТАБИЛИЗАТОР ТРЕХФАЗНОГО НАПРЯЖЕНИЯ С ОДНОФАЗНЫМ ЗВЕНОМ ВЫСОКОЙ ЧАСТОТЫ | 1996 |
|
RU2138112C1 |
| ТРЕХФАЗНЫЙ АКТИВНЫЙ ВЫПРЯМИТЕЛЬ НАПРЯЖЕНИЯ ДЛЯ СЕТЕЙ С НЕСИММЕТРИЧНЫМ НАПРЯЖЕНИЕМ | 2023 |
|
RU2824932C1 |
| КОМПЕНСАТОР РЕАКТИВНОЙ МОЩНОСТИ | 2016 |
|
RU2648690C2 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ВЫСШИХ ГАРМОНИК, АДАПТИРОВАННОЕ К ЭЛЕКТРОПРИВОДУ ПЕРЕМЕННОГО ТОКА | 2016 |
|
RU2619919C1 |
Изобретение относится к области электротехники и может быть использовано при управлении активными двунаправленными преобразователями частоты на базе активных выпрямителей напряжения и автономных инверторов напряжения в составе промышленных реверсивных автоматизированных электропроводов для компенсации индуктивного или емкостного потребления мощности различными нагрузками в питающей сети. Техническим результатом является повышение коэффициента мощности, снижение электрических потерь и стабилизация напряжения в питающей сети. Способ управления активным двунаправленным преобразователем частоты в системе автоматического регулирования активного выпрямителя напряжения позволяет регулировать реактивный ток в зависимости от уровня реактивной мощности в питающей сети. 1 ил.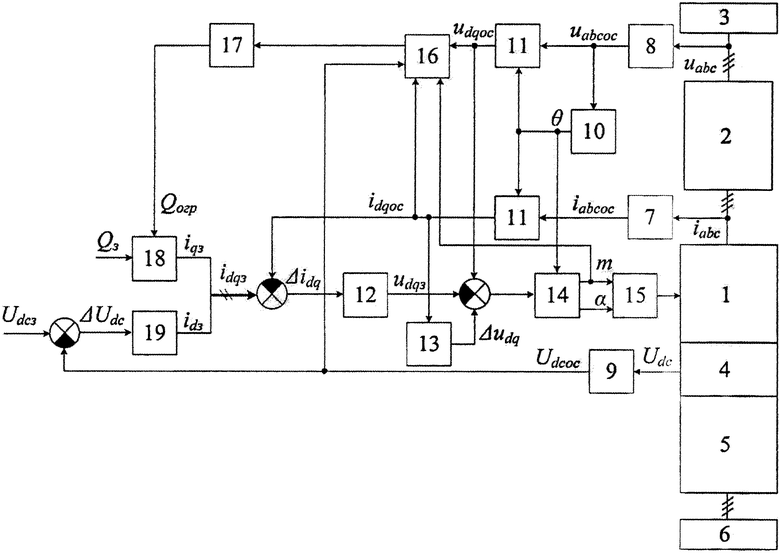
Способ управления активным двунаправленным преобразователем частоты, заключающийся в том, что с помощью активного выпрямителя напряжения из питающей сети через понижающий трансформатор, промежуточное звено постоянного тока и автономный инвертор напряжения подводят мощность к нагрузке, при этом измеряют напряжение, угол положения пространственного вектора напряжения питающей сети, напряжение в промежуточном звене постоянного тока и ток со вторичной обмотки понижающего трансформатора и формируют сигналы обратных связей, после чего сигнал обратной связи звена постоянного тока вычитается из сигнала задания напряжения постоянного тока и их разность поступает на вход регулятора напряжения, который формирует сигнал задания активного тока, при этом угол положения пространственного вектора напряжения питающей сети и сигналы обратных связей тока со вторичной обмотки трансформатора и напряжения питающей сети передают на преобразователь координат и формируют на этом основании сигналы обратных связей тока и напряжения во вращающейся системе координат, после чего сигналы обратных связей тока во вращающейся системе координат вычитают из сигналов здания токов и их разность передают на вход двухмерного регулятора тока, который в зависимости от сигнала разности формирует необходимый выходной сигнал для поддержания заданного тока на вторичной обмотке понижающего трансформатора, также при этом сигналы обратных связей тока во вращающейся системе координат передают на компенсатор перекрестных связей и формируют сигналы компенсации перекрестных связей, которые суммируют с сигналами выхода двумерного регулятора тока и сигналами обратных связей напряжения во вращающейся системе координат, после чего полученные сигналы передают на широтно-импульсный модулятор и рассчитывают коэффициент модуляции и угол сдвига выходного фазного напряжения активного выпрямителя напряжения относительно напряжения на вторичной обмотке понижающего трансформатора, после чего сигналы коэффициента модуляции и угла сдвига выходного фазного напряжения активного выпрямителя напряжения передают в устройство формирования сигналов управления, при этом расчет мгновенных значений активной, реактивной и полной мощности, потребляемой или генерируемой активным двунаправленным преобразователем частоты посредством активного выпрямителя напряжения, осуществляют на основе сигналов обратных связей тока и напряжения во вращающейся системе координат и сигнала обратной связи напряжения в промежуточном звене постоянного тока по формулам:
 ,
,
 ,
,
 ,
,
 ,
,
где Pc - активная мощность, Вт; Qc - реактивная мощность, вар; Sc - полная мощность, B·A; Ec - действующее фазное напряжение питающей сети, B; EABH - действующее фазное напряжение на выходе активного выпрямителя напряжения 1, B; KШИМ - коэффициент, зависящий от метода управления полупроводниковыми ключами активного выпрямителя напряжения 1; Udc - измеренное напряжение в звене постоянного тока, B; XL - эквивалентное индуктивное сопротивление на входе активного выпрямителя напряжения 1, Ом; R - эквивалентное активное сопротивление на входе активного выпрямителя напряжения 1, Ом; α - угол сдвига выходного фазного напряжения, эл. градусы; m - коэффициент модуляции,
и производят расчет величины ограничения реактивной мощности по формуле:
 ,
,
где Qогр - ограничение реактивной мощности, вар; Pc - активная мощность, Вт; Smax - максимально возможная передаваемая полная мощность в системе «активный выпрямитель напряжения 1 - питающая сеть 3, B·A,
и формируют сигнал задания реактивного тока по формуле:
 ,
,
где iqз - задающий сигнал реактивного тока, о.е.; Qогр - ограничение реактивной мощности, о.е.; udосн - номинальное напряжение питающей сети, о.е.
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРОВОЗА | 2011 |
|
RU2464621C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧЕТЫРЕХКВАДРАНТНОГО УСТАНОВОЧНОГО ОРГАНА, ВЫПОЛНЯЮЩЕГО РОЛЬ ПРЕОБРАЗОВАТЕЛЯ ТОКА СЕТИ | 1995 |
|
RU2145726C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2115218C1 |
| СПОСОБ ВВОДА КООРДИНАТ КУРСОРА | 1997 |
|
RU2151420C1 |
| DE 3326948 A1, 31.01.1985 | |||
| JP S 60200791 A, 11.10.1985 | |||
| US 7480160 B2, 20.01.2009 | |||
| Ю. М. Ламанов, Н. М. Андреев, В. Н. Терехин, В. И. Лацкий,изобретения П. А. Корляков, | 0 |
|
SU218729A1 |
| WO 9842070 A1, 24.09.1998. | |||

