Изобретение относится к системам наведения пучком лазерного излучения, технике лазерной космической связи и предназначено для наземной отработки систем наведения межспутниковых бортовых терминалов информационно-связных систем космических аппаратов.
Ранее известны, и опубликованы в печати, стенды для проведения летных приемосдаточных испытаний космического лазерного терминала связи (Германия) представленные в статье (Gerd Muehlnikel, Hartmut Kamptner, Frank Heine, Herwig Zech, Daniel Troendle, Tesat Spacecom, Germany. Rolf Meyer, Sabine Philipp-May, DLR, Germany. The Alphasat GEO Laser Communication Terminal Flight Acceptance Tests: Proc. International Conference on Space Optical Systems and Applications (ICSOS) 2012, 13-1, Ajaccio, Corsica, France. October 9-12.2012) [1]. В [1] приводится описание оборудования и методик испытания лазерного терминала связи, как для геостационарной, так и низкоорбитальной орбит. На отдельных стендах по стандартным процедурам космического приборостроения проверяется устойчивость терминала к различным механическим нагрузкам и электромагнитному излучению. На отдельном стенде, с применением пассивного демпфирования для снижения механических вибраций, при размещении терминала лазерной связи в термовакуумной камере, проводятся испытания для проверки характеристик и устойчивости работы составных частей терминала (его электрических связей, механической части, термического функционала, оптического функционала) в условиях, моделирующих космическое пространство (вакуум, термическое и спектральное воздействие солнечного излучения, низкие температуры).
В испытаниях оптического функционала определяются характеристики пучка лазерного излучения (мощность лазерного излучения, профиль волнового фронта лазерного пучка, поляризацию излучения, параллельность осей выходящего и входящего лазерных пучков). С помощью отдельного оптического устройства через оптическое волокно и согласующий телескоп на вход терминала подавалось излучение информационного лазерного пучка для определения вероятности ошибочного приема информации при различной скорости передачи данных в зависимости от уровня мощности лазерного излучения на входной апертуре терминала.
Таким образом, при всех испытаниях исследуются лишь характеристики и устойчивость к космическим условиям составных частей терминала и терминала в целом. Указанная архитектура испытательного стенда не позволяет моделировать этапы вхождения в связь и поддержание лазерного канала связи между двумя терминалами, движущимся по своим орбитам, т.е. технологию организации лазерной космической связи. На стенде не воспроизводятся реальные (характерные для условий космоса) скорости угловых перемещений лазерных пучков на входе двух терминалов при точности сопровождения и плотности мощности лазерного излучения на входе терминалов, которые реализуются в космических условиях, соответствующих заданным расстояниям между терминалами лазерной связи. Представленная архитектура испытательного стенда не позволяет проводить испытания терминалов при реальной работе канала связи между двумя терминалами с реализацией характерных для работы в космическом пространстве условий и функционированием всех составных частей терминалов, задействованных в процессе обмена информацией между терминалами, с подтверждением возможности реализации требуемой скорости передачи с достижением приемлемой вероятности ошибочного приема при обмене информацией между этими терминалами.
Наиболее близким техническим решением выбран стенд для отработки точных контуров наведения оптических осей квантово-оптических систем, приведенный в патенте на изобретение RU 2464541 (Патентообладатель: Государственное образовательное учреждение высшего профессионального образования Московский авиационный институт (государственный технический университет) (МАИ) (RU). Авторы Рой Ю.А. (RU), Выгон В.Г. (RU), Горобинский В.Н. (RU), Горобинский А.В. (RU), Епифанов А.В. (RU), Лахин В.A. (RU), Федоров Н.И. (RU), Чемоданов В.Б. (RU), опубликовано: 20.10.2012, Бюл. №29) [2], который предназначен только для отработки (регулировки) быстродействующих точных контуров наведения оптических осей квантово-оптических систем и, прежде всего, оптико-механических дефлекторов (зеркало с приводом).
Еще в качестве примера можно привести отечественный патент на изобретение RU 2793099 «Способ отработки технологии лазерной космической связи и стенд для его реализации» (Госкорпорация «Росатом» (RU), Федеральное государственное унитарное предприятие «Российский федеральный ядерный центр - Всероссийский научно - исследовательский институт экспериментальной физики» (ФГУП «РФЯЦ ВНИИЭФ») (RU). Авторы: Буйко С.A. (RU), Воеводин Д.Д. (RU), Гаранин С.Г. (RU), Григорович С.В. (RU), Лажинцев Б.В. (RU), Мокеев А.С. (RU), Писецкая А.В. (RU), Ройз И.М. (RU), Стародубцев В.А. (RU), опубликовано 29.03.2023, Бюл. №10) [3].
Основным недостатком этого стенда, предлагаемого этим патентом является невозможность количественно оценить точность наведения лазерных пучков лазерных терминалов друг на друга. Данный стенд не учитывает ограниченность скорости распространения света, т.к. расстояние между низкоорбитальным КА и геостационарным КА пучок лазерных импульсов проходит за 133 мсек., а за это время если не отслеживать местоположение противоположного лазерного терминала возможен срыв автосопровождения лазерных терминалов.
Наземный стенд предлагается с целью проверки методов, алгоритмов и технических решений, обеспечивавших повышение точности, оперативности и надежности взаимного наведения и устойчивое автосопровождение узконаправленных диаграмм лазерного излучения взаимодействующих бортовых терминалов информационно-связных систем космических аппаратов.
Задачей, на решение которой направлено изобретение, является отработка технологии космической лазерной связи в наземных условиях при моделировании на испытательном стенде, режимов работы терминалов связи, реализующих при функционировании терминалов в космических условиях.
Технический результат данного изобретения заключается в реализации возможности моделирования, с использованием реальных космических терминалов, как всех этапов вхождения в связь, так и в дальнейшем поддержания лазерного канала связи между двумя космическими терминалами, движущимся по своим орбитам на любом заданном расстоянии.
Технический результат состоит в обеспечении возможности в наземных условиях на испытательном стенде моделировать все режимы работы терминалов связи и отрабатывать системы взаимного наведения.
Технический результат с решением вышеуказанной задачи достигается тем, что стенд для наземной отработки систем наведения взаимодействующих лазерных терминалов систем космической связи, содержащий терминал лазерный №1, терминал лазерный №2; регистратор ошибки наведения терминала лазерного №1, включающий второй электронный блок обработки информации, второй координатный квантово-оптический датчик, например, четырехплощадочный фотодиод или фоточувствительная матрица, со второй формирующей оптической системой; второе светоделительное устройство, оптически сопряженное со вторым координатным квантово-оптическим датчиком и лазером терминала лазерного №2; содержащий первый электронный блок обработки информации, первый координатный квантово-оптический датчик, например, четырехплощадочный фотодиод или фоточувствительная матрица, с первой формирующей оптической системой; первое светоделительное устройство, оптически сопряженное с первым координатным квантово-оптическим датчиком и лазером терминала лазерного №1; сигналы с координатных квантово-оптических датчиков подаются на первый и второй электронные блоки обработки информации, сигналы с первого и второго электронных блоков подаются на входы блока контрольно-регистрирующей аппаратуры на базе ПЭВМ, первый электронный блок обработки информации и первый координатный квантово-оптический датчик содержатся в дополнительном регистраторе ошибки наведения лазерного терминала №2, светоделительные устройства выполнены в виде светоделительных кубиков, причем оптическая связь светоделительных кубиков с координатными квантово-оптическими датчиками регистраторов ошибок наведения и лазерами лазерных терминалов осуществляется посредством светофильтров-ослабителей; дополнительно каждый лазерный терминал содержит звездный датчик и формирователь временной задержки, обеспечивающий внутри лазерных терминалов формирование сигналов управления внутренним точным контуром наведения и устойчивое автосопровождение узконаправленных диаграмм лазерного излучения взаимодействующих бортовых терминалов информационно-связных систем космических аппаратов (КА) за счет временной задержки, которая пропорциональна расстоянию между лазерными терминалами; кроме того, каждый лазерный терминал установлен на опорно-поворотное устройство (ОПУ), взаимодействующее с имитатором бортовой аппаратуры КА и блоком электронного управления ОПУ; при этом, терминал №1 и терминал №2 имеют идентичный набор элементов стенда для связи друг с другом.
Изобретение поясняется схемами, где изображены на
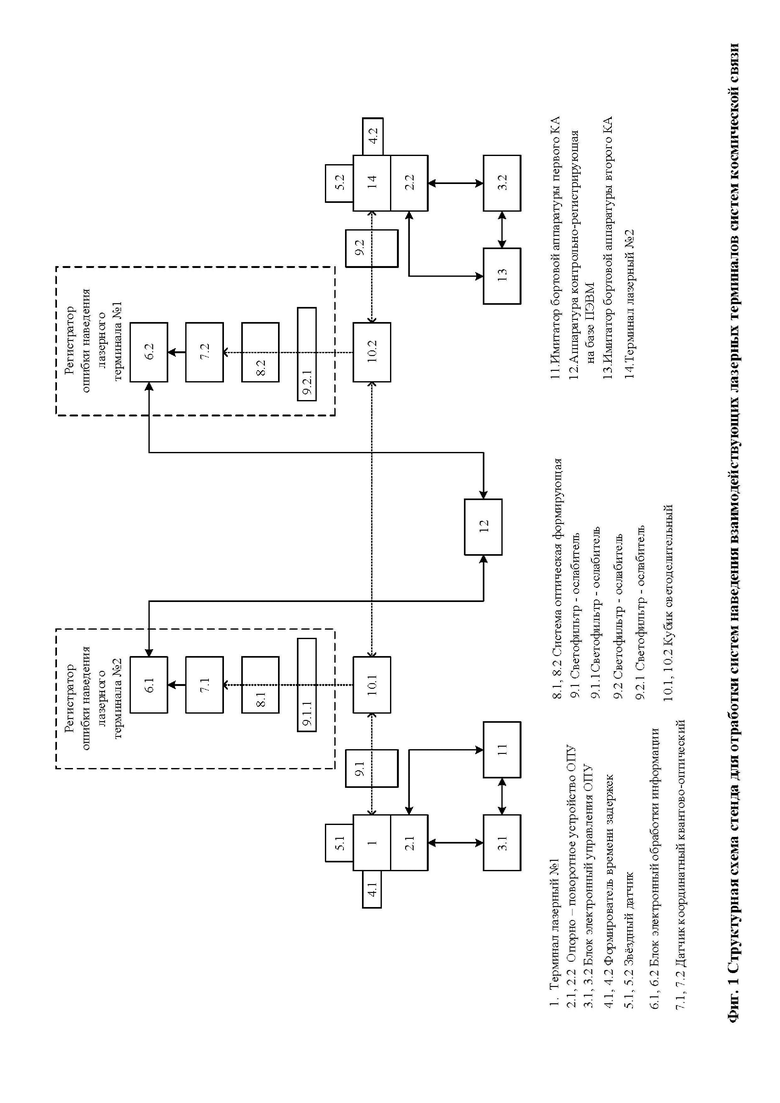
фиг. 1 структурная схема стенда для отработки систем наведения взаимодействующих лазерных терминалов систем космической связи;
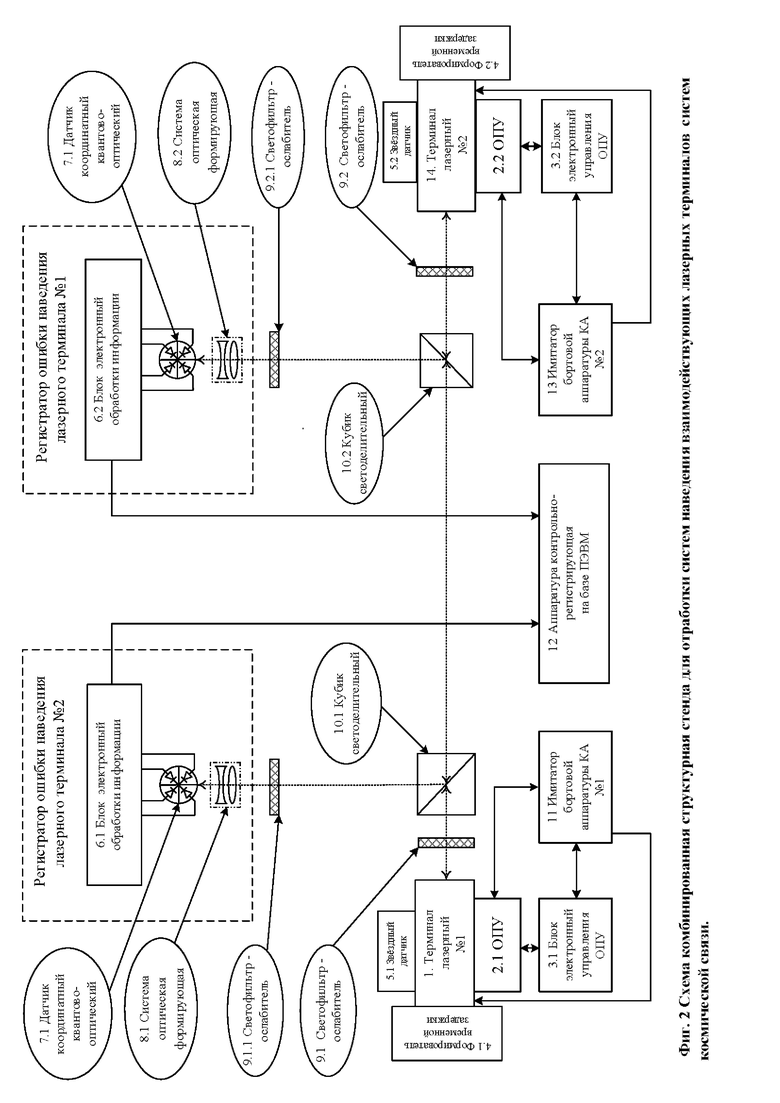
фиг. 2 схема комбинированная структурная стенда для отработки систем наведения взаимодействующих лазерных терминалов систем космической связи.
На схемах присутствуют обозначения позициями:
1 - терминал лазерный №1;
2.1 и 2.2 - опорно-поворотные устройства (ОПУ);
3.1 и 3.2 - блоки электронные управления ОПУ;
4.1 и 4.2 - формирователи временной задержки;
5.1 и 5.2 - звездные датчики;
6.1 и 6.2 - блоки электронные обработки информации;
7.1 и 7.2 - датчик координатный квантово-оптический;
8.1 и 8.2 - система оптическая формирующая;
9.1; 9.1.1; 9.2; 9.1.2 - светофильтры-ослабители;
10.1 и 10.2 - кубики светоделительные;
11 и 13 - имитаторы бортовой аппаратуры КА;
12 - аппаратура контрольно-регистрирующая на базе ПЭВМ;
14 - терминал лазерный №2.
Стенд для наземной отработки систем наведения взаимодействующих лазерных терминалов систем космической связи содержит терминал лазерный №1 (1), терминал лазерный №2 (14); регистратор ошибки наведения лазерного терминала №1 (1), который включает второй электронный блок обработки информации (6.2), второй координатный квантово-оптический датчик (7.2), например, четырехплощадочный фотодиод или фоточувствительная матрица, со второй формирующей оптической системой (8.2).
В дополнительном регистраторе ошибки наведения лазерного терминала №2 содержатся первый электронный блок обработки информации (6.1), первый координатный квантово-оптический датчик (7.1), например, четырехплощадочный фотодиод или фоточувствительная матрица, с первой формирующей оптической системой (8.1).
С первым координатным квантово-оптическим датчиком (7.1) и лазером лазерного терминала №1 (1) оптически сопряжено первое светоделительное устройство (10.1). Со вторым координатным квантово-оптическим датчиком (7.2) и лазером лазерного терминала №2 (14) оптически сопряжено второе светоделительное устройство (10.2). Оба светоделительных устройства выполнены в виде светоделительных кубиков (10.1 и 10.2).
Оптическая связь светоделительных кубиков с координатными квантово-оптическими датчиками регистраторов ошибок наведения и лазерами лазерных терминалов осуществляется посредством светофильтров-ослабителей (9.1; 9.1.1; 9.2; 9.2.2).
Лазерные терминалы содержат звездные датчики (5.1 и 5.2) и формирователи временной задержки (4.1 и 4.2), обеспечивающие внутри лазерных терминалов формирование сигналов управления внутренним точным контуром наведения и устойчивое автосопровождение узконаправленных диаграмм лазерного излучения взаимодействующих бортовых терминалов информационно-связных систем космических аппаратов (КА) за счет временной задержки, которая пропорциональна расстоянию между лазерными терминалами;
Лазерный терминал №1 (1) и лазерный терминал №2 (14) установлены на опорно-поворотные устройство (ОПУ) (2.1 и 2.2), взаимодействующие с имитаторами бортовой аппаратуры КА (11 и 13) и блоками электронного управления ОПУ (3.1 и 3.3).
Сигналы с координатных квантово-оптических датчиков подаются на первый (6.1) и второй (6.2) блоки обработки информации, сигналы с блоков (6.1) и (6.2) подаются на входы блока контрольно-регистрирующей аппаратуры на базе ПЭВМ.
Лазерные терминалы имеют идентичный набор элементов стенда для связи друг с другом.
Стенд работает следующим образом. Размещают первый (1) и второй (14) лазерные терминалы на опорно-поворотных устройствах (ОПУ) (2.1 и 2.2), определяют ориентацию строительных осей терминалов в заданной системе координат: обеспечивают на входной апертуре терминалов плотность мощности излучения (с помощью светофильтров-ослабителей 9.1 и 9.2) лазерных пучков соответствующую моделируемому расстоянию между терминалами в условиях космоса.
Генерируют, по крайней мере, по одному пучку лазерного излучения терминалом №1 и терминалом №2, направляют указанные пучки в апертуры друг на друга при помогли имитаторов бортовой аппаратуры (11 и 13) КА. Имитаторы бортовой аппаратуры (11 и 13) дают команду ОПУ (2.1 и 2.2) на разворот оптических осей лазерных терминалов навстречу друг другу. При вхождении в связь после получения первой пачки импульсов формирователь временной задержки стенда каждого лазерного терминала формирует временную задержку пропорциональную расстоянию между лазерными терминалами (например, расстояние, между низкоорбитальным КА и геостационарным КА пучок лазерных импульсов проходит за 133 мсек.) и подают на систему наведения одного из терминалов, сигналы управления на которые вырабатывают с учетом сигналов с приемной системы указанного терминала при регистрации излучения лазерных пучков другого терминала.
Кроме этого, ориентацию строительных осей терминалов могут определять в небесной системе координат для заданных моментов времени с использованием звездных датчиков, установленных на терминалах.
При генерировании первого пучка лазерного излучения каждым терминалом величину расходимости излучения указанных пучков могут выбирать превышающей угловую зону неопределенности положения терминалов, а при генерировании терминалами вторых и последующим пучков лазерного излучения величину расходимости пучков выбирают существенно меньший, чем расходимость первых пучков.
При направлении, по крайней мере, первого пучка лазерного излучения каждым терминалом в апертуру навстречу друг на друга лазерные терминалы могут выполнять угловое сканирование указанными пучками в угловой зоне, превышающей угловую зону неопределенности положения терминалов с помощью внутренних опорно-поворотных устройств и контуров точного сопровождения каждого терминала. Прекращают угловое сканирование после начала непрерывной регистрации приемными системами каждого из терминалов лазерного излучения пучка другого терминала.
При генерировании пучка лазерного излучения терминалом №1 (1) и терминалом №2 (14) могут непрерывно изменять мощность излучения, по крайней мере, одного лазерного пучка каждого терминала.
После регистрации приемной системой, по крайней мере, одного из терминалов излучения пучка, сформированного из информационного лазерного пучка другого терминала, приемной системой указанного терминала могут принимать тестовую информацию, передаваемую по информационному лазерному пучку другого терминала, и определять вероятность ошибочного приема передаваемой информации.
После разворота лазерных терминалов определяют ориентацию строительных осей терминалов в заданной системе координат навстречу друг другу и генерирования первых пучков лазерного излучения от терминала №1, (1) пучок проходит через светофильтр-ослабитель (9.1), через светоделительный кубик (10.1), расположенный у терминала №1, далее проходит через светоделительный кубик (10.2), расположенный у терминала №2. При этом, часть излучения через светофильтр-ослабитель (9.2.1) и систему оптическую формирующую (8.2) попадает на датчик координатный квантово-оптический (7.2) регистратора ошибки наведения лазерного терминала №1. Блок электронный обработки сигналов с датчика координатного квантово-оптического (6.2) вычисляет количественную ошибку наведения лазерного терминала №1. После генерирования первых пучков лазерного излучения от терминала №2, пучок проходит через светофильтр-ослабитель (9.2), светоделительный кубик (10.2), расположенный у терминала №2, далее проходит через светоделительный кубик (10.1) расположенный у терминала №1. При этом, часть излучения через светофильтр-ослабитель (9.1.1) и систему оптическую формирующую (8.1) попадает на датчик координатный квантово-оптический (7.1) регистратора ошибки наведения лазерного терминала №2 (14). Блок электронный обработки сигналов с датчика координатного квантово-оптического (6.1) вычисляет количественную ошибку наведения лазерного терминала №2.
Аппаратура, контрольно-регистрирующая на базе ПЭВМ (12) фиксирует ошибки наведения лазерных терминалов №1 (1) и №2 (14).
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ОТРАБОТКИ ТОЧНЫХ КОНТУРОВ НАВЕДЕНИЯ ОПТИЧЕСКИХ ОСЕЙ КВАНТОВО-ОПТИЧЕСКИХ СИСТЕМ | 2011 |
|
RU2464541C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО КОНТРОЛЯ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2012 |
|
RU2502647C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| Способ лазерной связи в открытом пространстве и комплекс для его реализации | 2023 |
|
RU2831323C1 |
| СПОСОБ ОТРАБОТКИ ТЕХНОЛОГИИ ЛАЗЕРНОЙ КОСМИЧЕСКОЙ СВЯЗИ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2793099C1 |
| Способ и устройство эмуляции атмосферной турбулентности для настройки и тестирования адаптивных оптических систем | 2022 |
|
RU2788312C1 |
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ПРИЕМНАЯ СИСТЕМА | 2022 |
|
RU2799499C1 |
| ТЕРМИНАЛ ЛАЗЕРНОЙ СВЯЗИ | 1997 |
|
RU2111617C1 |
| Лазерный голографический локатор | 2023 |
|
RU2812809C1 |
| Адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах | 2022 |
|
RU2791833C1 |
Изобретение относится к системам наведения пучком лазерного излучения, технике лазерной космической связи. Стенд для наземной отработки систем наведения взаимодействующих лазерных терминалов систем космической связи содержит два лазерных терминала; два регистратора ошибки наведения терминалов с электронным блоком обработки информации, координатным квантово-оптическим датчиком; второе светоделительное устройство, оптически сопряженное со вторым координатным квантово-оптическим датчиком и лазером терминала лазерного №2; светоделительное устройство, оптически сопряженное с первым координатным квантово-оптическим датчиком и лазером терминала лазерного №1. Сигналы с координатных квантово-оптических датчиков подаются на электронные блоки обработки информации, сигналы с которых подаются на входы блока контрольно-регистрирующей аппаратуры на базе ПЭВМ. Светоделительные устройства выполнены в виде светоделительных кубиков, связанных с квантово-оптическими датчиками и лазерами посредством светофильтров-ослабителей. Каждый лазерный терминал содержит звездный датчик и формирователь временной задержки. Технический результат - моделирование в наземных условиях всех режимов работы терминалов связи и систем взаимного наведения. 2 ил.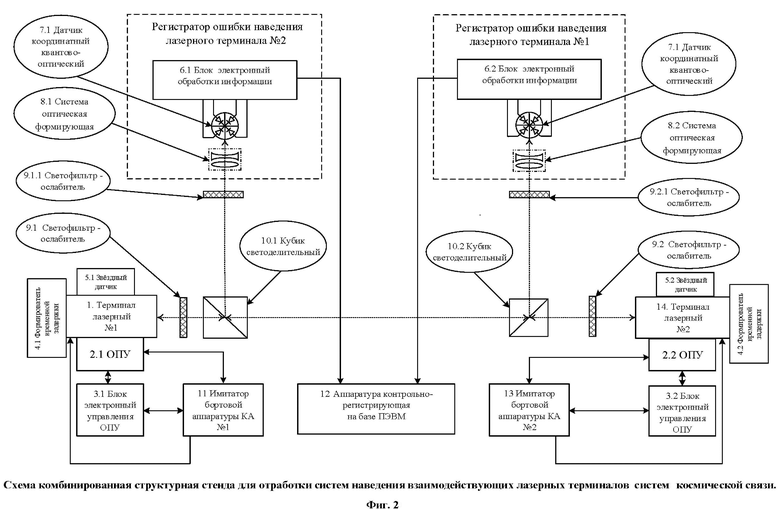
Стенд для наземной отработки систем наведения взаимодействующих лазерных терминалов систем космической связи, содержащий терминал лазерный №1 (1), терминал лазерный №2 (14); регистратор ошибки наведения терминала лазерного №1 (1), включающий второй электронный блок обработки информации (6.2), второй координатный квантово-оптический датчик (7.2), например четырехплощадочный фотодиод или фоточувствительную матрицу, со второй формирующей оптической системой (8.2); второе светоделительное устройство (10.2), оптически сопряженное со вторым координатным квантово-оптическим датчиком (7.2) и лазером терминала лазерного №2 (14);
содержащий первый электронный блок обработки информации (6.1), первый координатный квантово-оптический датчик (7.1), например четырехплощадочный фотодиод или фоточувствительную матрицу, с первой формирующей оптической системой (8.1); первое светоделительное устройство (10.1), оптически сопряженное с первым координатным квантово-оптическим датчиком (7.1) и лазером терминала лазерного №1 (1);
сигналы с координатных квантово-оптических датчиков подаются на первый (6.1) и второй (6.2) электронные блоки обработки информации, сигналы с первого (6.1) и второго (6.2) электронных блоков подаются на входы блока контрольно-регистрирующей аппаратуры на базе ПЭВМ,
отличающийся тем, что
первый электронный блок обработки информации (6.1) и первый координатный квантово-оптический датчик (7.1) содержатся в дополнительном регистраторе ошибки наведения лазерного терминала №2,
светоделительные устройства выполнены в виде светоделительных кубиков (10.1 и 10.2),
причем оптическая связь светоделительных кубиков с координатными квантово-оптическими датчиками регистраторов ошибок наведения и лазерами лазерных терминалов осуществляется посредством светофильтров-ослабителей;
дополнительно каждый лазерный терминал содержит звездный датчик и формирователь временной задержки, обеспечивающий внутри лазерных терминалов формирование сигналов управления внутренним точным контуром наведения и устойчивое автосопровождение узконаправленных диаграмм лазерного излучения взаимодействующих бортовых терминалов информационно-связных систем космических аппаратов (КА) за счет временной задержки, которая пропорциональна расстоянию между лазерными терминалами;
кроме того, каждый лазерный терминал установлен на опорно-поворотное устройство (ОПУ) (2.1 и 2.2), взаимодействующее с имитатором бортовой аппаратуры КА и блоком электронного управления ОПУ;
при этом терминал №1 и терминал №2 имеют идентичный набор элементов стенда для связи друг с другом.
| СПОСОБ ОТРАБОТКИ ТЕХНОЛОГИИ ЛАЗЕРНОЙ КОСМИЧЕСКОЙ СВЯЗИ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2793099C1 |
| СПОСОБ НАВЕДЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ ПРИЕМОПЕРЕДАТЧИКОВ АТМОСФЕРНОЙ ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2774839C2 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНЫХ ПУЧКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2744040C1 |
| Устройство для регистрации перемещений деталей различного рода механизмов | 1949 |
|
SU84105A1 |
| US 11546062 B1, 03.01.2023 | |||
| WO 2006114076 A1, 02.11.2006. | |||

