Данное изобретение относится к лазерной технике и системам наведения лазерного излучения. Предлагаемый стенд предназначен для отработки (регулировки) быстродействующих точных контуров наведения квантово-оптических систем, например, в межспутниковых лазерных системах связи.
Известно, что для того, чтобы уменьшить ошибку наведения лазерного луча, надо увеличить коэффициент усиления в контуре управления - это приводит к уменьшению запасов устойчивости контура управления следящей системы. Следовательно, нужны корректирующие устройства, тем сложнее, чем больше коэффициент усиления в контуре управления, кроме того сужается зона линейности усилительно-преобразовательных устройств следящей системы - отсюда возможны автоколебания в процессе слежения. Для установки оптимальных настроек контура управления необходимо проводить исследования всех этих процессов.
Задачей данного изобретения является создание стенда для апробации перспективных технических средств, новейшей элементной базы, схемотехнических решений и алгоритмов управления сверхузким лазерным лучом с целью отработки технологии высокоточного наведения лазерного луча при наличии полезного сигнала и возмущений, включая, например, вибрацию и качку носителя квантово-оптической системы.
Технический результат состоит в повышении надежности и точности наведения оптических осей квантово-оптических систем.
Для решения поставленной задачи и достижения технического результата предлагается стенд для отработки точных контуров наведения оптических осей квантово-оптических систем, включающий первый лазерный терминал, второй лазерный терминал, устройство, задающее возмущение лазерных лучей, блок контрольно-регистрирующей аппаратуры на базе ПЭВМ. Первый лазерный терминал содержит лазер с формирующей оптической системой, регистратор ошибки наведения, содержащий координатный квантово-оптический датчик с формирующей оптической системой и электронный блок обработки информации, светоделительное устройство, оптически сопряженное с координатным квантово-оптическим датчиком регистратора ошибки наведения, лазером первого лазерного терминала и с дефлектором устройства, задающего возмущение лазерных лучей. Второй лазерный терминал содержит лазер с формирующей оптической системой, пеленгатор, содержащий координатный квантово-оптический датчик с формирующей оптической системой и электронный блок обработки информации, дефлектор, вход которого соединен с выходом электронного блока обработки информации пеленгатора, светоделительное устройство, оптически сопряженное с лазером второго лазерного терминала, с координатным квантово-оптическим датчиком пеленгатора и с дефлектором второго лазерного терминала. Устройство, задающее возмущение лазерных лучей, расположенное между первым и вторым лазерными терминалами и оптически сопряженное со светоделительным устройством первого лазерного терминала и дефлектором второго лазерного терминала, содержит, по крайней мере, один дефлектор с подключенным к его входу генератором сигналов произвольной формы. Входы блока контрольно-регистрирующей аппаратуры на базе ПЭВМ соединены с выходом электронного блока обработки информации регистратора ошибки наведения, выходом электронного блока обработки информации пеленгатора, выходом генератора сигналов произвольной формы, выходом дефлектора второго лазерного терминала, выходом дефлектора устройства, задающего возмущение лазерных лучей.
На фиг.1 представлена структурная схема стенда для отработки точных контуров наведения оптических осей квантово-оптических систем. Оптическая связь между блоками на фиг.1 показана пунктирными линиями, а электрическая - сплошными линиями.
Стенд состоит из первого лазерного терминала (1), устройства, задающего возмущение лазерных лучей (2), второго лазерного терминала (3), блока контрольно-регистрирующей аппаратуры на базе ПЭВМ (4).
Первый лазерный терминал (1) содержит лазер (10) с формирующей оптической системой, светоделительное устройство (6) и регистратор ошибки наведения (5). Второй лазерный терминал (3) содержит лазер (13) с формирующей оптической системой, светоделительное устройство (12), пеленгатор (9) и дефлектор (8). Регистратор ошибки наведения (5) и пеленгатор (9) содержат координатные квантово-оптические датчики, например четырехплощадочные фотодиоды, электрические сигналы с которых подаются на соответствующие электронные блоки обработки информации. Блок контрольно-регистрирующей аппаратуры (4) представляет собой ПЭВМ (15), снабженную платой ввода-вывода (14).
На оптическом столе установлены первый (1) и второй (3) лазерные терминалы, которые излучают навстречу друг другу узкие лазерные лучи. При первоначальной юстировке стенда лазерный луч первого терминала направляют в центр координатного квантово-оптического датчика пеленгатора (9), а луч второго терминала направляют в центр координатного квантово-оптического датчика регистратора (5).
Для имитации качки носителя в стенд введено устройство, задающее колебания лазерных лучей (2), состоящее из дефлектора (7), представляющего собой зеркало с приводом, и генератора сигналов произвольной формы (11).
Стенд работает следующим образом. Лазер (10) первого терминала излучает луч в направлении второго лазерного терминала (3). Луч от лазера (10) проходит через светоделительное устройство (6), дефлекторы (7), (8) и далее через светоделительное устройство (12) попадает на координатный квантово-оптический датчик пеленгатора (9). Лазер (13) излучает луч в направлении первого лазерного терминала (1). Луч от лазера (13) проходит через светоделительное устройство (12), дефлекторы (8), (7) и далее через светоделительное устройство (6) попадает на координатный квантово-оптический датчик регистратора ошибки наведения (5). Если световое пятно от второго лазерного терминала (3) находится не в центре координатного квантово-оптического датчика, то регистратор ошибки наведения (5) выдает величину смещения светового пятна от центра координатного квантово-оптического датчика на блок контрольно-регистрирующей аппаратуры (4).
Устройство (2), задающее возмущение лазерных лучей, осуществляет перемещение лазерного луча в пространстве по двум координатам X и Y, тем самым имитирует качку носителя квантово-оптической системы. Перемещение лазерного луча в пространстве по двум координатам X и Y осуществляется с помощью двухосевого дефлектора (7). Вместо одного двухосевого дефлектора могут использоваться два одноосевых дефлектора.
Генератор сигналов произвольной формы (11) задает закон, в соответствии с которым колеблется зеркало двухосевого дефлектора (7). Таким образом, лазерные лучи отклоняются в пространстве по двум взаимно-перпендикулярным осям X и Y зеркалом дефлектора (7) согласно закону, заданному генератором сигналов произвольной формы (11). Электронный блок обработки информации пеленгатора (9), вырабатывает сигнал рассогласования, соответствующий величине отклонения светового пятна (засвеченного лучом с первого лазерного терминала) от центра координатного квантово-оптического датчика. Сигнал рассогласования с пеленгатора (9) подается в электронный блок управления двухосевым дефлектором (8), который вырабатывает управляющие сигналы, подаваемые на исполнительный механизм дефлектора (8). Двухосевой дефлектор (8) своим зеркалом отрабатывает отклонение луча по осям X и Y, заставляя лазерный луч перемещаться в центр координатного квантово-оптического датчика пеленгатора (9). Регистратор ошибки наведения (5) первого лазерного терминала (1) выдает величину отклонения лазерного луча от центра координатного квантово-оптического датчика. Контрольно-регистрирующая аппаратура на базе ПЭВМ записывает параметры процессов в контрольных точках электронных блоков стенда.
Задавая различные законы движения лазерного луча в пространстве зеркалом дефлектора (7), можно, изменяя колебательность контура управления в широких пределах, настроить его на необходимое качество переходного процесса.
Предлагаемый стенд позволяет устранить противоречия между требованиями повышения точности наведения осей квантово-оптической следящей системы и требованием сохранения ее устойчивости; исследовать зависимость точности наведения оптических осей приводом дефлектора от типа корректирующих обратных связей и их параметров, а также повысить быстродействие (а, следовательно, и полосу пропускания замкнутого контура) квантово-оптической следящей системы, изменяя величину крутящего момента, создаваемого исполнительным механизмом дефлектора.
Стенд позволяет также апробировать методики для отработки промышленной технологии достижения высокоточного наведения оптических осей объективов: методику выбора типа и обеспечения требуемых характеристик координатного квантово-оптического датчика, воспринимающего излучение объекта контроля; методику выбора кинематической схемы квантово-оптической следящей системы и определения требуемого «кинематического» закона управления ее приводами; методику анализа динамики и синтеза квантово-оптической следящей системы с учетом возмущений, создаваемых носителем квантово-оптической системы, внешними воздействиями, взаимовлияния каналов управления системы и других факторов.
Стенд позволяет также проводить сравнительные испытания дефлекторов с различным типом приводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для отработки систем наведения взаимодействующих лазерных терминалов космической связи | 2024 |
|
RU2841200C1 |
| Способ и устройство эмуляции атмосферной турбулентности для настройки и тестирования адаптивных оптических систем | 2022 |
|
RU2788312C1 |
| Способ наведения лазерного луча на объект | 2023 |
|
RU2807586C1 |
| Автоматизированный аппаратурный комплекс спутниковой открытой оптической связи | 2015 |
|
RU2608060C2 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
| СПОСОБ ОТРАБОТКИ ТЕХНОЛОГИИ ЛАЗЕРНОЙ КОСМИЧЕСКОЙ СВЯЗИ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2793099C1 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНЫХ ПУЧКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2744040C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| КОМБИНИРОВАННАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2014 |
|
RU2541494C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЕЙ С ОПТОВОЛОКОННЫМИ ВЫВОДАМИ НА ЦЕЛЬ | 2022 |
|
RU2793613C1 |
Стенд может быть использован в лазерной технике и системах наведения лазерного излучения. Стенд содержит первый и второй лазерные терминалы, расположенное между ними устройство, задающее возмущение лазерных лучей для имитации качки носителя, и блок контрольно-регистрирующей аппаратуры на базе ПЭВМ. Первый лазерный терминал содержит лазер, регистратор ошибки наведения, включающий координатный квантово-оптический датчик и электронный блок обработки информации, и светоделительное устройство. Второй - лазер, пеленгатор, включающий координатный квантово-оптический датчик и электронный блок обработки информации, дефлектор и светоделительное устройство. Устройство, задающее возмущение лазерных лучей, содержащее, по крайней мере, один дефлектор с подключенным к его входу генератором сигналов произвольной формы. Технический результат - получение повышения надежности и точности наведения оптических осей квантово-оптических систем, например, в межспутниковых лазерных системах связи. 1 ил.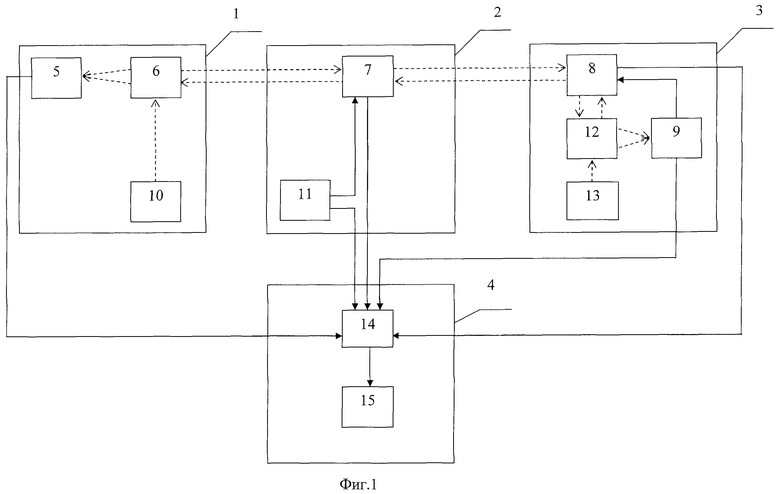
Стенд для отработки точных контуров наведения оптических осей квантово-оптических систем, состоящий из первого лазерного терминала, содержащего лазер с формирующей оптической системой, регистратор ошибки наведения, включающий координатный квантово-оптический датчик с формирующей оптической системой и электронный блок обработки информации, светоделительное устройство, оптически сопряженное с координатным квантово-оптическим датчиком регистратора ошибки наведения, лазером первого лазерного терминала и дефлектором устройства, задающего возмущение лазерных лучей; второго лазерного терминала, содержащего лазер с формирующей оптической системой, пеленгатор, включающий координатный квантово-оптический датчик с формирующей оптической системой и электронный блок обработки информации, дефлектор, вход которого соединен с выходом электронного блока обработки информации пеленгатора, светоделительное устройство, оптически сопряженное с лазером второго лазерного терминала, координатным квантово-оптическим датчиком пеленгатора и с дефлектором второго лазерного терминала; устройства, задающего возмущение лазерных лучей, расположенного между первым и вторым лазерными терминалами и оптически сопряженного со светоделительным устройством первого лазерного терминала и дефлектором второго лазерного терминала, содержащего, по крайней мере, один дефлектор с подключенным к его входу генератором сигналов произвольной формы; блока контрольно-регистрирующей аппаратуры на базе ПЭВМ, входы которого соединены с выходом электронного блока обработки информации регистратора ошибки наведения, выходом электронного блока обработки информации пеленгатора, выходом генератора сигналов произвольной формы, выходом дефлектора второго лазерного терминала, выходом дефлектора устройства, задающего возмущение лазерных лучей.
| Устройство для регистрации перемещений деталей различного рода механизмов | 1949 |
|
SU84105A1 |
| Устройство для вибрационной обработки | 1990 |
|
SU1808665A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ПРИЦЕЛА СИСТЕМЫ ТЕЛЕОРИЕНТИРОВАНИЯ С ИЗЛУЧАЮЩИМИ КАНАЛАМИ НА ИНЖЕКЦИОННЫХ ЛАЗЕРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2234659C1 |
| WO 2006114076 A1, 02.11.2006 | |||
| Способ контроля юстировки направления оси пучка света и устройство для его осуществления | 1987 |
|
SU1584760A3 |

