Изобретение относится к области наведения, в частности к лазерным атмосферным системам передачи информации и может быть использовано для наведения приемопередатчика атмосферной оптической линии связи (АОЛС) на корреспондирующий приемопередатчик АОЛС.
Известен способ построения высокоточной прицельной системы с переменным полем зрения (см. патент РФ 2683127, С2. кл. F41G 1/38, G02B 23/00 опубл. 26.03.2019 г.) в котором для вычисления поправок текущего положения линии визирования использованы встроенный коллиматор и тестовое изображение с цифровой обработкой в реальном масштабе времени. Однако в данном способе наведение линии визирования осуществляется по сигналам датчиков объективов, что затрудняет поиск источника излучения, оказавшегося вне углового поля зрения приемопередатчика АОЛС и уменьшает точность и скорость наведения линии визирования приемопередатчика АОЛС в горизонтальной и вертикальной плоскости.
Известно приемопередающее устройство оптической атмосферной линии связи (см. патент РФ 2306673, С2. кл Н04В 10/10, опубл. 20.09.2007 г.), состоящее из приемопередающего устройства оптической атмосферной линии связи, выполненного в виде внешнего и внутреннего блоков, содержащее интерфейс, источник оптического излучения, приемник оптического излучения, фокусирующую систему и волоконный световод, один конец которого закреплен во внешнем блоке, а другой конец волоконного световода расположен во внутреннем блоке и оптически соединен с источником оптического излучения и приемником оптического излучения, причем внешний блок выполнен во всепогодном варианте и в нем расположена фокусирующая система, а интерфейс, источник оптического излучения и приемник оптического излучения установлены во внутреннем блоке, выполненном для комнатных условий, устройство снабжено дополнительными световодами, первые концы которых, расположенные во внешнем блоке, объединены в пучок, образующий волоконно-оптический коллектор, а вторые концы световодов, расположенные во внутреннем блоке, оптически соединены, по крайней мере, с одним источником и приемником оптического излучения с возможностью коммутации.
Недостатком известного приемопередающего устройства является большое время наведения линии визирования приемопередатчика АОЛС на корреспондирующий приемопередатчик АОЛС и относительно низкая точность наведения. Это объясняется тем, что при превышении допустимого углового рассогласования между внешними блоками двух абонентов при применении стандартных световодов, диаметр фокусного пятна принимаемого излучения, может оказаться не на оптической оси, и как следствие не попадет в торец волоконно-оптического коллектора. А в случае частичного попадания оптического излучения в торец волоконно-оптического коллектора, его энергетический запас может оказаться ниже требуемого значения, что снизит надежность работы устройства в целом. Кроме того, известная конструкция приемо-передающего устройства обладает низкой скоростью наведения линии визирования оптического приемопередатчика АОЛС на корреспондирующий приемопередатчик АОЛС при отсутствии или частичном попадании оптического излучения в торец волоконно-оптического коллектора или при резких колебаниях оптического луча.
Известен способ наведения линии визирования прибора наблюдения на источник лазерного излучения и устройство для его осуществления (см. патент РФ 2103639, С1. кл. F41G 3/00 опубл. 27.01.1998 г.) заключающийся в определении отклонения текущего углового положения линии визирования прибора наблюдения относительно нулевого направления, связанного с основанием, определения углового положения источника лазерного излучения относительно базового направления, связанного с основанием, расчете величины возмущающего воздействия, пропорциональному этому угловому положению, замене нулевого возмущающего воздействия, соответствующего нулевому направлению, возмущающим воздействием, пропорциональным угловому положению источника лазерного излучения относительно базового направления и поворот прибора наблюдения до тех пор, пока отклонение не станет меньше заданной величины, который по совокупности существенных признаков и выбран в качестве прототипа.
Недостатком известного способа является то, что нулевое и базовое направление прибора наблюдения задается произвольно, что затруднит поиск источника излучения, оказавшегося вне сектора обзора датчика лазерного излучения и увеличит ошибку в наведении. При секторе обзора 90° не просматриваемый сектор составит 270°. Наведение линии визирования прибора наблюдения осуществляется только в горизонтальной плоскости, при этом прибор наблюдения и источник лазерного излучения могут оказаться на разных высотах относительно уровня моря, что увеличит время наведения линии визирования приемопередатчика АОЛС на корреспондирующий приемопередатчик АОЛС.
Из известных наиболее близким аналогом (прототипом) по своей технической сущности заявленному устройству является устройство двусторонней оптической связи (см. патент РФ 2272358, С1. кл Н04В 10/10, опубл. 20.03.2006 г.), состоящее из двух приемопередающих узлов, каждый из которых имеет приемопередающую оптическую систему, содержащую приемную площадку с периметром в виде окружности, центр которой совпадает с центральной осью приемопередающей оптической системы. С одной стороны приемной площадки расположены собирающие линзы, установленные равномерно по периметру приемной площадки, на оптической оси последовательно размещены лазер с источником питания и коллиматорная оптика. С другой стороны приемной площадки последовательно размещены оптический элемент с отражающий поверхностью, фокусирующая линза и фотоприемник. На оптической оси каждой собирающей линзы установлено поворотное зеркало, оптически связанное с собирающей линзой и отражающей поверхностью оптического элемента, оптически связанной с фокусирующей линзой. Чувствительный фотоприемник и светоделительная пластинка позиционно связаны между собой.
Недостатком устройства прототипа является малая скорость и точность наведения приемопередатчика АОЛС на корреспондирующий приемопередатчик. Это объясняется тем, что поворотные зеркала фокусируют излучение только от собирающих линз на которые, попало оптическое излучение. При значительном отклонении в наведении приемопередающих оптических систем, особенно при максимальных дистанциях связи оптическое излучение попадет только на часть линз или не попадет ни на одну из них, что не позволит их суммировать на фотоприемнике, а, следовательно, определить изменение угла приходящего излучения и последующего измерения линейного отклонения изображения фокального пятна на позиционно чувствительном фотоприемнике от оптической оси для поворота приемопередающей оптической системы. Кроме того, конструкция опорно-поворотного устройства и взаимосвязь элементов в приемопередатчике АОЛС обладают низкой скоростью наведения линии визирования приемопередатчика в горизонтальной и вертикальной плоскостях в зависимости от изменения угла падения приходящего излучения.
Целью заявленных технических решений является разработка способа и устройства наведения линии визирования приемопередатчика АОЛС, обеспечивающих повышение точности и скорости наведения линии визирования приемопередатчика АОЛС на корреспондирующий приемопередатчик в горизонтальной и вертикальной плоскости за счет уменьшения времени определения расположения приемопередатчиков относительно друг друга по азимуту и углу места, а также отклонения и уровня принимаемого оптического излучения.
В заявленном способе поставленная цель достигается тем, что в известном способе наведения линии визирования прибора наблюдения на источник лазерного излучения, заключающемся в том, что приемопередатчик АОЛС определяет угловое положение корреспондирующего приемопередатчика относительно базового направления, рассчитывают величину управляющего воздействия, пропорциональную этому угловому положению на механизм поворота приемопередатчика АОЛС, производят замену нулевого управляющего воздействия, соответствующего нулевому направлению, рассчитанным управляющим воздействием, пропорциональным угловому положению корреспондирующего приемопередатчика АОЛС относительно базового направления и осуществляют поворот приемопередатчика АОЛС на корреспондирующий приемопередатчик АОЛС до тех пор, пока отклонение не станет меньше заданной величины, дополнительно для определения углового положения корреспондирующего приемопередатчика АОЛС определяют координаты и высоту над уровнем моря обоих приемопередатчиков АОЛС, передают координаты и высоту над уровнем моря на корреспондирующий приемопередатчик АОЛС по радиоканалу. На каждом приемопередатчике АОЛС рассчитывают истинный азимут и угол места, пересчитывают истинный азимут в магнитный азимут. Устанавливают рассчитанные значения магнитного азимута и истинного угла места в качестве начального направления. Поворот приемопередатчика АОЛС на корреспондирующий приемопередатчик осуществляют не только в горизонтальной, но и в вертикальной плоскости до тех пор, пока отклонение не станет меньше заданной величины.
Новая совокупность существенных признаков позволяет достичь указанного технического результата за счет определения вначале на каждом из приемопередатчиков АОЛС координат и высоты над уровнем моря, передаче по радиоканалу координат и высоты над уровнем моря на корреспондирующий приемопередатчик, расчете на каждом приемопередатчике истинного азимута и угла места, пересчете истинного азимута в магнитный азимут, установке рассчитанных значений магнитного азимута и истинного угла места в качестве начального направления, в результате чего сокращается время определения расположения приемопередатчиков относительно друг друга по азимуту и углу места. Поворот приемопередатчика на корреспондирующий приемопередатчик осуществляют не только в горизонтальной, но и в вертикальной плоскости до тех пор, пока отклонение не станет меньше заданной величины. Этим достигается повышение точности и скорости наведения линии визирования приемопередатчика АОЛС в горизонтальной и вертикальной плоскости.
Поставленная цель в заявленном устройстве наведения линии визирования приемопередатчика АОЛС достигается тем, что в известном устройстве двусторонней оптической связи, содержащее расположенный в корпусе приемопередатчика АОЛС оптический приемопередатчик (ОПП), включающий в своем корпусе лазер с источником питания, коллимирующую оптику, фотоприемник, а также расположенные в корпусе приемопередатчика АОЛС электронный блок управления (ЭБУ) и опорно-поворотное устройство (ОПУ), дополнительно введены радиоприемопередающий модуль (РМ) с антенной, навигационный модуль (НМ) с блоком памяти и антенной, подключенный к радиоприемопередающему модулю, и модуль наведения (МН), подключенный к ЭБУ и соединенный с фотодетекторами, равномерно расположенными по периметру торцевой поверхности корпуса ОПП. Модуль наведения включает в себя блок ориентации, гироскоп, блок задания режима наведения (ЗРН), датчик положения линии визирования (ПЛВ) расположенный на корпусе приемопередатчика АОЛС и механически соединенный с ОПУ, и блок определения углового положения источника оптического излучения (ИОИ). Выходы РМ соединены соответственно с входом НМ и входом блока ЗРН модуля наведения, выход которого соединен с входом ЭБУ, соответствующие входы которого соединены с соответствующими выходами блока определения углового положения ИОИ, гироскопа, блока ориентации и датчика положения линии визирования, соответствующие входы блока определения углового положения модуля наведения являются выходами фотодетекторов, выход ЭБУ соединен с двигателем ОПУ, выход датчика ПЛВ соединен с входом ЭБУ.
Благодаря новой совокупности существенных признаков за счет дополнительного введенных элементов в заявленное устройство, радиоприемопередающего модуля (РМ), навигационного модуля (НМ) и модуля наведения (МН), реализовано определение координат и высоты над уровнем моря на каждом из приемопередатчиков АОЛС с последующей передачей по радиоканалу полученных данных на корреспондирующий приемопередатчик, благодаря чему сокращается время определения расположения приемопередатчиков относительно друг друга по азимуту и углу места и наведение линии визирования. Поворот приемопередатчика на корреспондирующий приемопередатчик осуществляют не только в горизонтальной, но и в вертикальной плоскости до тех пор, пока отклонение не станет меньше заданной величины. Размещение по периметру торцевой поверхности корпуса ОПП фотодетекторов, позволяет при наведении линий визирования приемопередатчика АОЛС определить угловое положение источника оптического излучения (ИОИ) и автоматически подстроить линию визирования. Этим достигается повышение точности и скорости наведения линии визирования приемопередатчика АОЛС в горизонтальной и вертикальной плоскости.
Заявленные объекты изобретения поясняются чертежами.
На фиг. 1 приведена схема первоначальной ориентации линии визирования каждого приемопередатчика АОЛС с последующим ориентированием их линий визирования на магнитный север. На фиг. 1 введены следующие обозначения:
НЛВ - направление линии визирования;
НН - нулевое направление;
БН - базовое направление;
СНИМ - северное направление истинного меридиана;
Аи1 и Аи2 - истинный азимут на корреспондирующий приемопередатчик АОЛС. Истинный азимут - горизонтальный угол, измеряемый по ходу часовой стрелки от 0° до 360° между СНИМ данной точки и направлением на объект.
На фиг. 2 приведена схема ориентирования линии визирования приемопередатчика АОЛС по магнитному азимуту на корреспондирующий приемопередатчик АОЛС. На фиг. 2 введены следующие обозначения:
δ - угол между истинным и магнитным меридианами для географического положения приемопередатчика АОЛС;
Ам1 и Ам2 - магнитный азимут на корреспондирующий приемопередатчик АОЛС. Магнитный азимут - горизонтальный угол, измеряемый по ходу часовой стрелки от 0° до 360° между северным направлением магнитного меридиана данной точки на объект.
На фиг. 3 приведена схема расположения приемопередатчиков АОЛС.
На фиг. 4 приведена схема устройства наведения линии визирования приемопередатчика АОЛС.
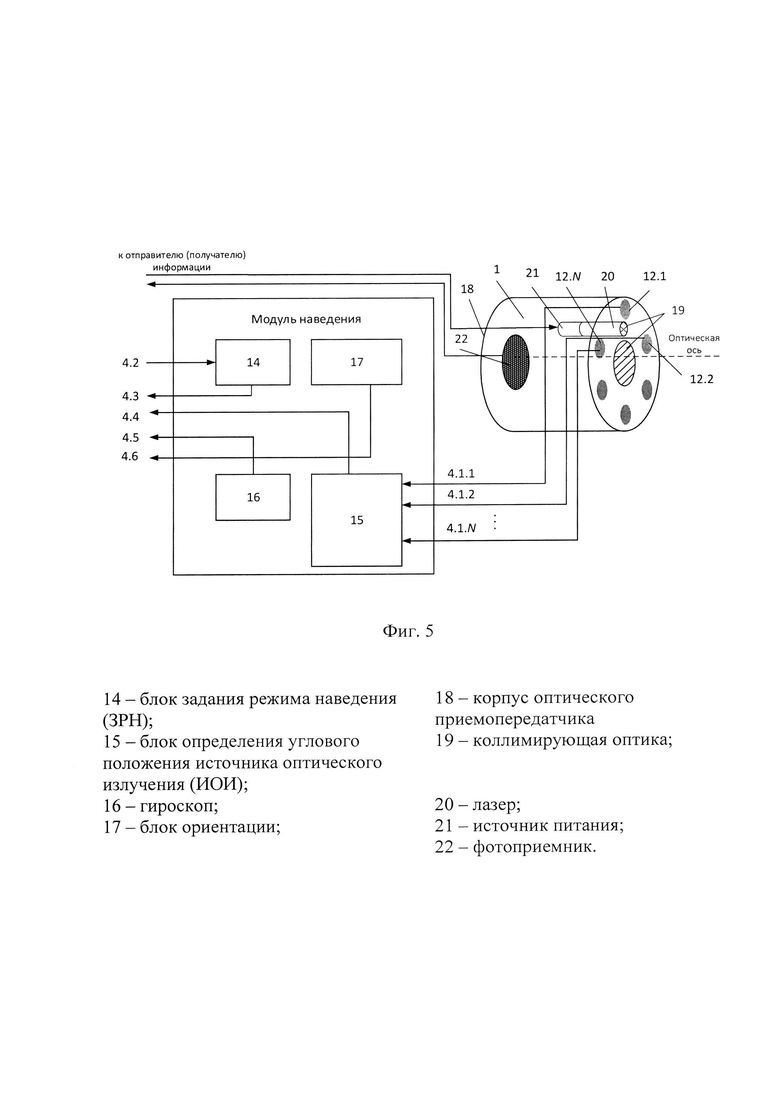
На фиг. 5 приведена схема модуля наведения и оптического приемопередатчика.
Реализация заявленного способа заключается в следующем. Для каждого приемопередатчика АОЛС с первоначальной ориентацией линии визирования как по азимуту, так и по углу места с помощью блока ориентации осуществляется ориентация на магнитный север (фиг. 1). Модуль навигации определяет координаты (B, L, H) приемопередатчика АОЛС в геодезической системе координат [ГОСТ 32453-2013 Межгосударственный стандарт. Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек].
По радиоканалу, организованному между приемопередатчиками АОЛС производится обмен координатами (B1, L1, H1 и B2, L2, H2). Каждый приемопередатчик АОЛС производит расчет истинного азимута на корреспондирующий приемопередатчик АОЛС (Аи1 и Аи2) и угол места (β1, β2). Истинный азимут направления называется угол, измеряемый от северного направления географического меридиана по ходу часовой стрелки до заданного направления [Бубнов И.А. Военная топография: учебник. М.: Военное издательство, 1977].
При проведении расчетов используются значения фундаментальных геодезических постоянных [Военно-топографическое управление ГШ ВС РФ «Параметры Земли 1990 года» (ПЗ-90.11). Справочный документ. Москва 2014 г.]: коэффициент сжатия Земного эллипсоида α=1/298,25784; большая полуось общеземного эллипсоида a=6378136 м.
Эксцентриситет Земного эллипсоида

Расчет радиуса кривизны первого вертикала для приемопередатчиков АОЛС


Каждый приемопередатчик АОЛС производит пересчет геодезических координат в геоцентрическую декартовую систему координат 0XYZ, центр которой совмещен с центром масс Земли, ось 0Z направлена по оси вращения Земли в сторону Северного полюса, ось 0Х лежит в плоскости земного экватора и связана с Гринвичским меридианом G, ось 0Y дополняет систему координат до правой [Перов А.И. Основы построения спутниковых радионавигационных систем. Учеб. пособие для вузов. - М: Радиотехника, 2012. 240 с.: ил.]. В СРНС ГЛОНАСС геоцентрическая подвижная система координат определена как ПЗ-90, а в СРНС GPS - WGS-84 [ГОСТ 32453-2013 Межгосударственный стандарт. Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек].
Расчет геоцентрических координат первого и второго приемопередатчика АОЛС






Расчет протяженности АОЛС RАОЛС между двумя приемопередатчиками АОЛС

Расчет углов места β для приемопередатчиков АОЛС


Определение топоцентрического параметра ρ для приемопередатчиков АОЛС

Расчет истинного азимута Аи1 для первого приемопередатчика АОЛС:
Если L1<L2

Если L1>L2

Если L1=L2 и В1>B2 то Аи1=π=180°.
Если L1=L2 и В1<В2 то Аи1=0°.
Расчет истинного азимута Аи2 для второго приемопередатчика АОЛС:
Если L1<L2

Если L1>L2

Если L1=L2 и В1>В2 то Аи2=0°.
Если L1=L2 и В1<В2 то Аи2=π=180°.
Каждый приемопередатчик АОЛС определяет магнитное склонение δ - угол между истинным и магнитным меридианами для своего географического положения (фиг. 2). С помощью одной из трех наиболее используемых моделей геомагнитного поля Земли:
1. IGRF (International Geomagnetic Reference Field) - разработано Международной Ассоциацией Геомагнетизма и аэрономии (The International Association of Geomagnetism and Aeronomy, IAGA, http://www.ngdc.noaa.gov/IAGA/vmod/igrf.html)
2. WMM (World Magnetic Model) - всемирная модель геомагнитного поля Земли - разработана Национальным агентством США по обработке пространственных геоданных (The U.S. National Geospatial-Intelligence Agency, NGA), Национальным центром геофизических данных США (The U.S. National Geophysical Data Center, NGDC, http://www.ngdc.noaa.gov/ngdc.html) и Британским геологоразведочным обществом (the British Geological Survey, BGS, http://www.geomag.bgs.ac.uk/)
3. Глобальная модель геомагнитного поля - BGGM (The BGS Global Geomagnetic Model - разработана Британским геологоразведочным обществом (the British Geological Survey, BGS, http://www.geomag.bgs.ac.uk/).
Каждый приемопередатчик АОЛС определяет магнитный азимут (Ам1 и Ам2) на противоположный приемопередатчик по формуле

Если магнитная стрелка отклоняется от истинного меридиана к востоку, то склонение восточное (учитывается со знаком +), при отклонении магнитной стрелки к западу - западное (учитывается со знаком -).
Значение магнитных азимутов каждого приемопередатчика АОЛС используются для ориентирования линии визирования на корреспондирующий приемопередатчик АОЛС в азимутальной плоскости.
Для ориентирования линии визирования приемопередатчика АОЛС в вертикальной плоскости за нулевой уровень горизонта используется уровень от гироскопа. От этого уровня модуль наведения настраивает линию визирования приемопередатчика АОЛС по расчетным углам места (β1, β2).
Заявленное устройство, показанное на фиг. 4, содержит оптический приемопередатчик (ОПП) 1, включающий лазер 20 с источником питания 21, коллимирующую оптику 19 и фотоприемник 22, радиоприемопередающий модуль (РМ) 2, навигационный модуль (НМ) 5, электронный блок управления (ЭБУ) 7, опорно-поворотное устройство (ОПУ) 8, модуль наведения (МН) 4, содержащий блок ориентации 17, гироскоп 16, блок задания режима наведения (ЗРН) 14, датчик положения линии визирования (ПЛВ) 13, механически соединенный с ОПУ 8 и с корпусом приемопередатчика АОЛС 23, блок определения углового положения источника оптического излучения (ИОИ) 15, фото детекторы 12.1, 12.2, …, 12.N, расположенные равномерно по периметру торцевой поверхности корпуса 18 ОПП 1.
Элементы соединены между собой следующим образом (см. фиг. 4). Первый выход/вход 2.1 РМ 2 соединен с антенной РМ 3, второй выход 2.2 РМ 2 соединен с входом 5.2 НМ 5, третий выход 2.3 РМ 2 соединен с входом 4.2 блока ЗРН 14 МН 4. Вход 5.1 НМ 5 соединен с антенной НМ 6. Выход 5.4 НМ 5 соединен с входом 2.4 РМ 2, выход 5.3 НМ 5 соединен с первым входом 7.1 ЭБУ 7. Фотодекторы 12.1, 12.2, …, 12.N соединены с соответствующими входами 4.1.1, 4.1.2, …4.1.N блока определения углового положения ИОИ 15 МН 4. Выход 4.3 блока ЗРН 14 МН 4 соединен с вторым входом 7.2 ЭБУ 7, выход 4.4 блока определения углового положения ИОИ 15 соединен с третьим входом 7.3 ЭБУ 7, выход 4.5 гироскопа 16 МН 4 соединен с четвертым входом 7.4 ЭБУ 7, выход 4.6 блока ориентации 17 МН 4 соединен с пятым входом 7.5 ЭБУ 7. Выход 7.6 ЭБУ 7 соединен с двигателем ОПУ 9. Выход датчика ПЛВ 13 соединен с входом 7.7 ЭБУ 7.
ОПП 1 предназначен для преобразования электрического сигнала в оптический сигнал на передаче и обратного преобразования на приеме и обеспечивает образование дуплексного беспроводного оптического канала связи. ОПП 1 может быть реализован в различных вариантах, в частности, как показано на фиг. 4.
Радиоприемопередающий модуль (РМ) 2 предназначен для передачи и приема радио сигналов между устройствами наведения линии визирования приемопередатчика АОЛС.(РМ) 2 может быть реализован в различных вариантах, например, в виде оборудования, основанного на технологии PreWi-Max, аппаратуры атмосферной оптической линии связи ARTOLINK M1FE-R [Руководство по эксплуатации МБДК.3РЭ. Аппаратура атмосферной оптической линии связи ARTOLINK M1FE-R].
Навигационный модуль 5 предназначен для определения географических координат местоположения устройства наведения линии визирования приемопередатчика АОЛС в текущий момент времени на основе данных временных задержек прихода радиосигналов. Навигационный модуль 5 может быть реализован в различных вариантах, например, в виде навигационной аппаратуры потребителя «Грот-В» 14Ц821 [Приемоиндикатор возимый «Грот-В» индекс 14Ц821. Руководство по эксплуатации ЦДКТ.464316.448 РЭ].
Модуль наведения (МН) 4 предназначен для определения и наведения линии визирования приемопередатчика АОЛС на линию визирования корреспондирующего приемопередатчика АОЛС
Блок задания режима наведения 14 предназначен для выбора режима наведения линии визирования приемопередатчика АОЛС: ручной/автоматический.
Блок задания режима наведения 14 может быть реализован в различных вариантах, например, в виде двух позиционной кнопки-джостика без фиксации типа CP101DJ21 для ручного наведения и клавишного двух позиционного переключателя типа YL-211-02 для выбора режима работы «ручной/автоматический».
Блок определения углового положения источника оптического излучения 15 предназначен для определения углового положения оптического излучения от корреспондирующего устройства наведения линии визирования приемопередатчика АОЛС.
Блок определения углового положения источника оптического излучения 15 может быть реализован в различных вариантах, например, в виде блока определения углового положения и типа источника излучения и задания поворота системы ТШУ-1-2А.
Фотодетекторы 12.1, 12.2, …, 12.N, могут быть реализованы на основе фоторезисторов, например ФСА-О, ФСА-4 и др [Алексеенко М.Д., Бараночников М.Л. Приемники оптического излучения: Справочник. - М.: Радио и Связь, 1987. - 296 с., ил. Стр. 47].
Датчик положения линии визирования (13), механически соединенный с опорно-поворотным устройством (8), может быть реализован в различных вариантах, например, в виде вращающегося трансформатора 2,5 Вт, входящего в состав системы 1ЭЦ29, статор которого механически соединен с опорно-поворотным устройством (8), а ротор механически соединен с корпусом (23) приемопередатчика АОЛС. [Система 1ЭЦ29. Техническое описание и инструкция по эксплуатации 1ЭЦ29.000 ТО. Разработка СКБ «Ротор», 1985.]
Гироскоп 16 предназначен для определения изменения угловой ориентации устройства наведения линии визирования приемопередатчика АОЛС. Гироскоп 16 может быть реализован в различных вариантах, например, в виде модуля трех-осевого гироскопа на основе чипа L3G4200D или единого модуля: гироскопа, акселерометра и магнитного компаса выполненного на основе чипа MPU-9250.
Блок ориентации 17 предназначен для определения направления линии магнитного поля Земли в точке измерения. Блок ориентации 17 может быть реализован в различных вариантах, например, в виде платы ориентации ЖНКЮ. 469339.663 [Устройство антенно-мачтовое АМУ. Руководство по эксплуатации. ЖНКЮ.301317.008 РЭ].
ОПУ 8 предназначен для крепления устройства наведения линии визирования приемопередатчика АОЛС. ОПУ 8 может быть реализовано в различных вариантах, например, в виде комплекта универсального монтажного [Руководство по эксплуатации МБДК.3РЭ. Аппаратура атмосферной оптической линии связи ARTOLINK].
Двигатель 9 ОПУ предназначен для обеспечения привода механизма поворота 10 ОПУ. Двигатель 9 ОПУ может быть реализован в различных вариантах, например, в виде электродвигателя Д-28А ТУ ОДС.515.248. [Антенно-поворотное устройство МИК-АПУ модуля антенного Р-431АМ. Руководство по эксплуатации ЖНКЮ.303246.001 РЭ].
Механизм поворота 10 ОПУ предназначен для пространственного наведения линии визирования приемопередатчика АОЛС на корреспондирующий приемопередатчик. Механизм поворота 10 ОПУ может быть реализован в различных вариантах, например, в виде редуктора азимута, редуктора угла места и платы контроллера управления устройства антенно-поворотного МИК-АПУ модуля антенного Р-431АМ [Антенно-поворотное устройство МИК-АПУ модуля антенного Р-431АМ. Руководство по эксплуатации ЖНКЮ.303246.001 РЭ].
Электронный блок управления (ЭБУ) 7 предназначен для формирования команд на изменение наведения линии визирования приемопередатчика АОЛС на корреспондирующий приемопередатчик. ЭБУ 7 может быть реализован в различных вариантах, например, в виде платы управления устройства антенно-поворотного МИК-АПУ модуля антенного Р-431АМ [Руководство по эксплуатации ЖНКЮ.303246.001 РЭ], которая может работать автономно в режиме внешнего управления по интерфейсу RS-232 и в режиме внешнего управления от ЭВМ по интерфейсу RS-485.
Лазер 20 с источником питания 21 предназначен для преобразования электрической энергии в световую и может быть реализован на основе полупроводниковых лазерных диодов, схемы которых известны [Оптические телекоммуникационные системы. Учебник для вузов / В.Н. Гордиенко, В.В. Крухмалев, А.Д. Моченов, Р.М. Шарафутдинов. Под ред. профессора В.Н. Гордиенко. - М: Горячая линия - Телеком, 2011. - 368. С: ил. Стр. 92, 93].
Устройство наведения линии визирования приемопередатчика АОЛС работает следующим образом. В начальный период работы линии визирования приемопередатчики наведены произвольно, при этом с датчика положения линии визирования 13 в ЭБУ 7 поступает сигнал о направлении линии визирования (см. фиг. 1). Навигационный модуль 5 совместно с антенной НМ 6 по сигналам глобальных навигационных спутниковых систем определяет координаты и высоту над уровнем моря, и одновременно передает их в два узла: ЭБУ 7 и радиоприемопередающий модуль 2.
В ЭБУ 7 на основе координат и высоты над уровнем моря, а также на основе показаний гироскопа 16 и показаний блока ориентации 17 осуществляется расчет истинного азимута и угла места, с последующим пересчетом истинного азимута в магнитный азимут. ЭБУ 7 посылает сигнал в двигатель 9 ОПУ на поворот механизма поворота ОПУ 10 исходя из рассчитанных значений магнитного азимута и истинного угла места, таким образом, чтобы датчик положения линии визирования 13 имел ориентацию на нулевое направление (НН). Радиоприемопередающий модуль 2 через антенну РМ 3 передает свои координаты и высоту над уровнем моря на корреспондирующий приемопередатчик. Полученные корреспондирующим приемопередатчиком АОЛС координаты и высота над уровнем моря через антенну 3 поступают в РМ 2, который передает их в ЭБУ 7 для расчета углового положения корреспондирующего приемопередатчика относительно базового направления (БН). В ЭБУ 7 рассчитывается величина управляющего воздействия, которая будет пропорциональна этому угловому положению и производится замена нулевого управляющего воздействия, соответствующего НН, возмущающим воздействием, пропорциональным угловому положению корреспондирующего приемопередатчика относительно БН. После чего ЭБУ 7 посылает сигнал в двигатель 9 ОПУ на поворот механизма поворота ОПУ 10 исходя из рассчитанных значений на корреспондирующий приемопередатчик АОЛС.
После наведения оптический приемопередатчик (ОПП) 1 первого приемопередающего узла генерирует оптическое излучение, принимаемые приемопередатчиком второго приемопередающего узла (фиг. 3). При распространении оптического излучения вдоль дистанции связи в атмосфере происходит взаимодействие оптического излучения с турбулентной газовой средой, в результате чего луч интерферирует и искривляется. Это приводит к образованию на приемной стороне зон с повышенной и пониженной интенсивностью излучения, флуктуирующих как в пространстве, так и во времени. Дополнительно с этим происходят медленные подвижки точек крепления блоков, связанные с сезонными и суточными изменениями температуры среды, качанием ретрансляционных вышек, вибрациями и колебаниями зданий и сооружений, используемых в качестве мест крепления.
В предложенной оптической схеме ОПП 1, показанной на фиг. 5, на первом приемопередающем узле импульсы излучения вырабатываются лазером 20 с источником питания 21, которые формируются коллиматорной оптикой 19 в практически параллельный пучок и направляются на приемопередающую оптическую систему второго приемопередающего узла. Излучение, попадает в торец ОПП 1 на коллиматорную оптику 19 и на фотодетекторы 12.1, 12.2, …, 12.N. С коллиматорной оптики 19 принятый оптический сигнал собирается на фотоприемнике 22.
При точном наведении принимаемое оптическое излучение, попадает на фотодетекторы 12.1, 12.2, …, 12.N, которые передают полученный сигнал в блок определения углового положения ИОИ 15, где оценивается направление получения оптического излучения и уровень сигнала. В случае поступления сигналов от всех фотодетекторов 12.1, 12.2, …, 12.N и требуемом уровне оптического излучения сигнал в ЭБУ 7 на формирование команда на изменение наведения в двигатель 9 ОПУ не передает.
При рассогласовании наведения приемопередатчика АОЛС на корреспондирующий приемопередатчик, принимаемое излучение, попавшее на торец ОПП 1 сместится, в результате чего оно будет попадать только на часть фотодетекторов 12.1, 12.2, …, 12.N. Блок определения углового положения ИОИ 15 определит задействованные и не задействованные фото детекторов 12.1, 12.2, …, 12.N. При требуемом уровне оптического излучения, команда на изменения наведения ЭБУ 7 не вырабатывается. Если уровень принимаемого оптического излучения ниже требуемого, то ЭБУ 7 вырабатывает команду на изменение наведения ОПП 1, которая подается на двигатель 9 ОПУ, на поворот механизма поворота 10 ОПУ в горизонтальной и (или) в вертикальной плоскости. Это позволяет обеспечить повышение точности и скорости наведения линии визирования приемопередатчика АОЛС в горизонтальной и вертикальной плоскости за счет уменьшения времени определения расположения приемопередатчиков относительно друг друга по азимуту и углу места, а также отклонения и уровня принимаемого оптического излучения, т.е. достичь сформулированный технический результат.
Перемещение приемопередающего устройства атмосферной оптической линии связи в горизонтальной и (или) в вертикальной плоскости осуществляется за счет шарнирного механизма 11 ОПУ, механизма поворота 10 ОПУ и двигателя 9 ОПУ, размещенных в ОПУ 8, по командам управления, поступающих с ЭБУ 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО АТМОСФЕРНОЙ ОПТИЧЕСКОЙ СИСТЕМЫ ПЕРЕДАЧИ | 2022 |
|
RU2791074C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО АТМОСФЕРНОЙ ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 2020 |
|
RU2745525C1 |
| СПОСОБ БЕСПРОВОДНОЙ СВЯЗИ ЧЕРЕЗ АТМОСФЕРНУЮ ОПТИЧЕСКУЮ ЛИНИЮ И СИСТЕМА БЕСПРОВОДНОЙ ОПТИЧЕСКОЙ СВЯЗИ | 2006 |
|
RU2312371C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
| Помеховый комплекс на ретрансляторах для создания помех радиолокационным средствам | 2017 |
|
RU2658628C1 |
| АНТЕННЫЙ МОДУЛЬ СПУТНИКОВОЙ СВЯЗИ ПАССАЖИРСКОГО ПОЕЗДА | 2009 |
|
RU2396710C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ СИГНАЛОВ ПЕЛЕНГОВАНИЯ ОБЪЕКТА ВИЗИРОВАНИЯ ИНЕРЦИАЛЬНОГО И РАДИОЛОКАЦИОННОГО ДИСКРИМИНАТОРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488137C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ЛИНИЕЙ ВИЗИРОВАНИЯ АНТЕННЫ | 2004 |
|
RU2282230C1 |
| СИСТЕМА ПОРТАТИВНЫХ КОМПЛЕКТОВ ДЛЯ АВТОМАТИЗИРОВАННОГО ЦЕЛЕУКАЗАНИЯ НА ПОЛЕ БОЯ | 2019 |
|
RU2717138C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
Изобретение относится к технике связи и может использоваться в лазерных атмосферных системах передачи информации. Технический результат состоит в повышении точности и скорости наведения линии визирования приемопередатчика АОЛС на корреспондирующий приемопередатчик в горизонтальной и вертикальной плоскости. Для этого на каждом из приемопередатчиков АОЛС определяют координаты и высоту над уровнем моря, передают координаты и высоту над уровнем моря на корреспондирующий приемопередатчик, определяют на каждом приемопередатчике истинный азимут и угол места, преобразуют истинный азимут в магнитный азимут, устанавливают значения магнитного азимута и истинного угла места в качестве начального направления. Устройство состоит из расположенных в корпусе приемопередатчика АОЛС оптического приемопередатчика (ОПП), включающего в своем корпусе лазер с источником питания, коллимирующую оптику, фотоприемник, а также расположенные в корпусе приемопередатчика АОЛС электронный блок управления (ЭБУ) и опорно-поворотное устройство (ОПУ). 2 н.п. ф-лы, 5 ил.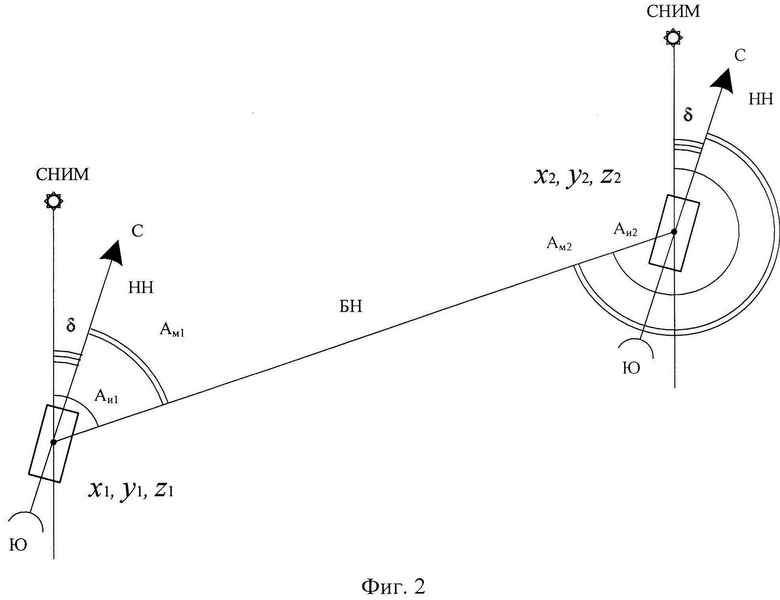
1. Способ наведения линии визирования приемопередатчика атмосферной оптической линии связи (АОЛС) на корреспондирующий приемопередатчик АОЛС, заключающийся в том, что приемопередатчик АОЛС определяет угловое положение корреспондирующего приемопередатчика относительно базового направления, далее рассчитывают величину управляющего воздействия, пропорциональную этому угловому положению на механизм поворота приемопередатчика АОЛС, производят замену нулевого управляющего воздействия, соответствующего нулевому направлению, рассчитанным управляющим воздействием, пропорциональным угловому положению корреспондирующего приемопередатчика АОЛС относительно базового направления, и осуществляют поворот приемопередатчика АОЛС на корреспондирующий приемопередатчик АОЛС до тех пор, пока отклонение не станет меньше заданной величины, отличающийся тем, что для определения углового положения корреспондирующего приемопередатчика АОЛС определяют координаты и высоту над уровнем моря обоих приемопередатчиков АОЛС, передают координаты и высоту над уровнем моря на корреспондирующий приемопередатчик АОЛС по радиоканалу, на каждом приемопередатчике АОЛС рассчитывают истинный азимут и угол места, пересчитывают истинный азимут в магнитный азимут, устанавливают рассчитанные значения магнитного азимута и истинного угла места в качестве начального направления, причем поворот приемопередатчика АОЛС на корреспондирующий приемопередатчик осуществляют не только в горизонтальной, но и в вертикальной плоскости до тех пор, пока отклонение не станет меньше заданной величины.
2. Устройство наведения линии визирования приемопередатчика атмосферной оптической линии связи, содержащее расположенный в корпусе приемопередатчика АОЛС оптический приемопередатчик (ОПП), включающий в своем корпусе лазер с источником питания, коллимирующую оптику, фотоприемник, а также расположенные в корпусе приемопередатчика АОЛС электронный блок управления (ЭБУ) и опорно-поворотное устройство (ОПУ), отличающееся тем, что в состав устройства дополнительно введены радиоприемопередающий модуль (РМ) с антенной, навигационный модуль (НМ) с блоком памяти и антенной, подключенный к радиоприемопередающему модулю, и модуль наведения (МН), подключенный к ЭБУ и соединенный с фотодетекторами, равномерно расположенными по периметру торцевой поверхности корпуса ОПП, при этом модуль наведения включает в себя блок ориентации, гироскоп, блок задания режима наведения (ЗРН), датчик положения линии визирования (ПЛВ), расположенный на корпусе приемопередатчика АОЛС и механически соединенный с ОПУ, и блок определения углового положения источника оптического излучения (ИОИ), при этом выходы РМ соединены соответственно с входом НМ и входом блока ЗРН модуля наведения, выход которого соединен с входом ЭБУ, соответствующие входы которого соединены с соответствующими выходами блока определения углового положения ИОИ, гироскопа, блока ориентации и датчика положения линии визирования, соответствующие входы блока определения углового положения модуля наведения являются выходами фотодетекторов, выход ЭБУ соединен с двигателем ОПУ, выход датчика ПЛВ соединен с входом ЭБУ.
| УСТРОЙСТВО ДВУСТОРОННЕЙ ОПТИЧЕСКОЙ СВЯЗИ | 2004 |
|
RU2272358C1 |
| СПОСОБ НАВЕДЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ ПРИБОРА НАБЛЮДЕНИЯ НА ИСТОЧНИК ЛАЗЕРНОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2103639C1 |
| WO 2012051798 A1, 26.04.2012 | |||
| СПОСОБ ДЛЯ КОНТРОЛЯ ИНФОРМАЦИОННОГО КАНАЛА УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2243581C1 |
| US 2009138233 A1, 28.05.2009 | |||
| US 5408351 A, 18.04.1995. | |||

