Изобретение относится к специализированным устройствам вычислительной техники и может быть использовано в моделирующих центрах Вооруженных сил Российской Федерации как составной компонент системы поддержки принятий решений лицами, принимающих решения при подготовке и ведении боевых действий, для моделирования управления составным подвижным объектом, осуществляющим объектовую защиту группового подвижного объекта в условиях неопределенности его местоположения в позиционном районе.
Под групповым подвижным объектом понимается совокупность нескольких взаимодействующих однотипных подвижных объектов, расположенных на ограниченной площади. В то же время под составным подвижным объектом понимается совокупность разнотипных подвижных объектов, объединенных некоторыми структурно-функциональными признаками в единую систему и взаимодействующих в процессе выполнения общей функции.
Известны устройства [1] и [2], позволяющие моделировать процесс перемещения подвижного объекта и каталог разведки разнотипных подвижных объектов.
Общим недостатком данных устройств является относительно узкие функциональные возможности, не позволяющие моделировать групповое управление составным подвижным объектом, осуществляющим объектовую защиту группового подвижного объекта, функционирующего в позиционном районе в условиях неопределенности.
Наиболее близким к заявляемому устройству является устройство [3], позволяющее моделировать состояния отдельного объекта в условиях неопределенности.
Недостатком наиболее близкого технического решения являются относительно узкие функциональные возможности, не позволяющие моделировать групповое управление составным подвижным объектом, осуществляющим объектовую защиту группового подвижного объекта, функционирующего в позиционном районе в условиях неопределенности.
Требуемый технический результат устройства для моделирования группового управления составным подвижным объектом в условиях неопределенности заключается в создании устройства, позволяющего моделировать групповое управление составным подвижным объектом на основе метода агентного моделирования и построения мультиагентных систем [4] с учетом неопределенности истинного местоположения прикрываемого группового подвижного объекта в позиционном районе, создаваемого за счет осуществления им маневренных действий, представляющих собой периодическую поочередную смену занимаемых позиций. Предложенное техническое решение позволяет создать соответствующее устройство, направленное на выявление сильных и слабых сторон исследуемого объекта в условиях воздействия по нему различных средств поражения, тем самым в дальнейшем приводя к формированию перечня компенсационных мер.
Требуемый технический результат достигается тем, что устройство содержит генератор тактовых импульсов, датчик случайных чисел, регистр сдвига, блок формирования каталога координат позиций группового подвижного объекта, регистр памяти, блок моделирования маневренных действий группового подвижного объекта, блок расчета времени занятия очередной позиции подвижным объектом, блок моделирования состояния группового подвижного объекта, блок расчета времени начала свертывания подвижного объекта на текущей позиции, блок сравнения, датчик случайных чисел, блок коррекции времени нахождения подвижного объекта на текущей позиции, блок расчета времени убытия подвижного объекта с текущей позиции, блок расчета времени движения подвижного объекта к очередной позиции, блок расчета времени прибытия подвижного объекта к очередной позиции, блок формирования текущей выборки, блок формирования оптимального варианта расположения подвижных средств защиты, блок формирования оптимального варианта расположения подвижных пунктов управления, блок формирования оптимального варианта расположения подвижных средств радиолокационной разведки, блок моделирования группового управления составным подвижным объектом, при этом первый выход генератора тактовых импульсов соединен с первым управляющим входом регистра сдвига, второй выход генератора тактовых импульсов соединен с входом опроса датчика случайных чисел, выход датчика случайных чисел соединен с первым входом блока формирования каталога координат позиций группового подвижного объекта, первый выход блока формирования каталога координат позиций группового подвижного объекта соединен с первым управляющим входом регистра памяти, второй выход блока формирования каталога координат позиций группового подвижного объекта соединен со вторым управляющим входом регистра сдвига, третий выход блока формирования каталога координат позиций группового подвижного объекта соединен с первым входом блока моделирования маневренных действий группового подвижного объекта, первый информационный выход регистра сдвига соединен со вторым входом блока формирования каталога координат позиций группового подвижного объекта, второй информационный выход регистра сдвига соединен с первым входом блока сравнения, третий информационный выход регистра сдвига соединен со входом блока расчета времени занятия очередной позиции подвижным объектом, четвертый информационный выход регистра сдвига соединен с первым входом блока расчета времени начала свертывания подвижного объекта на текущей позиции, пятый информационный выход регистра сдвига соединен с третьим входом блока расчета времени убытия подвижного объекта с текущей позиции, шестой информационный выход регистра сдвига соединен с входом блока расчета времени движения подвижного объекта к очередной позиции, седьмой информационный выход регистра сдвига соединен со вторым входом блока формирования оптимального варианта расположения подвижных средств защиты, восьмой информационный выход регистра сдвига соединен со вторым входом блока формирования оптимального варианта расположения подвижных пунктов управления, девятый информационный выход регистра сдвига соединен со вторым входом блока формирования оптимального варианта расположения подвижных средств радиолокационной разведки, первый выход блока расчета времени занятия очередной позиции подвижным объектом соединен с вторым входом блока расчета времени начала свертывания подвижного объекта на текущей позиции, второй выход блока расчета времени занятия очередной позиции подвижным объектом соединен с первым входом блока моделирования состояния группового подвижного объекта, выход блока расчета времени начала свертывания подвижного объекта на текущей позиции соединен со вторым входом блока моделирования состояния группового подвижного объекта, выход блока моделирования состояния группового подвижного объекта соединен со вторым входом блока сравнения, выход БОЛЬШЕ / РАВНО блока сравнения соединен со вторым входом блока моделирования маневренных действий группового подвижного объекта и первым входом блока расчета времени убытия подвижного объекта с текущей позиции, выход МЕНЬШЕ блока сравнения соединен с входом опроса датчика случайных чисел, выход датчика случайных чисел соединен с входом блока коррекции времени нахождения подвижного объекта на текущей позиции, выход блока коррекции времени нахождения подвижного объекта на текущей позиции соединен со вторым входом блока расчета времени убытия подвижного объекта с текущей позиции, первый выход блока расчета времени убытия подвижного объекта с текущей позиции соединен с третьим входом блока моделирования маневренных действий группового подвижного объекта, второй выход блока расчета времени убытия подвижного объекта с текущей позиции соединен с первым входом блока расчета времени прибытия подвижного объекта к очередной позиции, первый выход блока расчета времени прибытия подвижного объекта к очередной позиции соединен с четвертым входом блока моделирования маневренных действий группового подвижного объекта, второй выход блока расчета времени прибытия подвижного объекта к очередной позиции соединен с третьим управляющим входом регистра сдвига, выход блока расчета времени движения подвижного объекта к очередной позиции соединен с первым входом блока расчета времени прибытия подвижного объекта к очередной позиции, выход блока моделирования маневренных действий группового подвижного объекта соединен со вторым управляющим входом регистра памяти, информационный выход регистра памяти соединен с первым входом блока формирования текущей выборки, выход блока формирования текущей выборки соединен с первым входом блока формирования оптимального варианта расположения подвижных средств защиты, первый выход блока формирования оптимального варианта расположения подвижных средств защиты соединен с первым входом блока формирования оптимального варианта расположения подвижных пунктов управления, второй выход блока формирования оптимального варианта расположения подвижных средств защиты соединен с первым входом блока моделирования группового управления составным подвижным объектом, первый выход блока формирования оптимального варианта расположения подвижных пунктов управления соединен с первым входом блока формирования оптимального варианта расположения подвижных средств радиолокационной разведки, второй выход блока формирования оптимального варианта расположения подвижных пунктов управления соединен со вторым входом блока моделирования группового управления составным подвижным объектом, выход блока формирования оптимального варианта расположения подвижных средств радиолокационной разведки соединен с третьим входом блока моделирования группового управления составным подвижным объектом, выход блока моделирования группового управления составным подвижным объектом соединен с третьим управляющим входом регистра памяти.
Сущность изобретения поясняется чертежом, где на фиг. 1 представлена структурная схема устройства для моделирования группового управления составным подвижным объектом в условиях неопределенности.
Устройство для моделирования группового управления составным подвижным объектом в условиях неопределенности содержит генератор 1 тактовых импульсов, датчик 2 случайных чисел, регистр 3 сдвига, блок 4 формирования каталога координат позиций группового подвижного объекта, регистр 5 памяти, блок 6 моделирования маневренных действий группового подвижного объекта, блок 7 расчета времени занятия очередной позиции подвижным объектом, блок 8 моделирования состояния группового подвижного объекта, блок 9 расчета времени начала свертывания подвижного объекта на текущей позиции, блок 10 сравнения, датчик 11 случайных чисел, блок 12 коррекции времени нахождения подвижного объекта на текущей позиции, блок 13 расчета времени убытия подвижного объекта с текущей позиции, блок 14 расчета времени движения подвижного объекта к очередной позиции, блок 15 расчета времени прибытия подвижного объекта к очередной позиции, блок 16 формирования текущей выборки, блок 17 формирования оптимального варианта расположения подвижных средств защиты, блок 18 формирования оптимального варианта расположения подвижных пунктов управления, блок 19 формирования оптимального варианта расположения подвижных средств радиолокационной разведки, блок 20 моделирования группового управления составным подвижным объектом, при этом первый выход генератора 1 тактовых импульсов соединен с первым управляющим входом регистра 3 сдвига, второй выход генератора 1 тактовых импульсов соединен с входом опроса датчика 2 случайных чисел, выход датчика 2 случайных чисел соединен с первым входом блока 4 формирования каталога координат позиций группового подвижного объекта, первый выход блока 4 формирования каталога координат позиций группового подвижного объекта соединен с первым управляющим входом регистра 5 памяти, второй выход блока 4 формирования каталога координат позиций группового подвижного объекта соединен со вторым управляющим входом регистра 3 сдвига, третий выход блока 4 формирования каталога координат позиций группового подвижного объекта соединен с первым входом блока 6 моделирования маневренных действий группового подвижного объекта, первый информационный выход регистра 3 сдвига соединен со вторым входом блока 4 формирования каталога координат позиций группового подвижного объекта, второй информационный выход регистра 3 сдвига соединен с первым входом блока 10 сравнения, третий информационный выход регистра 3 сдвига соединен со входом блока 7 расчета времени занятия очередной позиции подвижным объектом, четвертый информационный выход регистра 3 сдвига соединен с первым входом блока 9 расчета времени начала свертывания подвижного объекта на текущей позиции, пятый информационный выход регистра 3 сдвига соединен с третьим входом блока 13 расчета времени убытия подвижного объекта с текущей позиции, шестой информационный выход регистра 3 сдвига соединен с входом блока 14 расчета времени движения подвижного объекта к очередной позиции, седьмой информационный выход регистра 3 сдвига соединен со вторым входом блока 17 формирования оптимального варианта расположения подвижных средств защиты, восьмой информационный выход регистра 3 сдвига соединен со вторым входом блока 18 формирования оптимального варианта расположения подвижных пунктов управления, девятый информационный выход регистра 3 сдвига соединен со вторым входом блока 19 формирования оптимального варианта расположения подвижных средств радиолокационной разведки, первый выход блока 7 расчета времени занятия очередной позиции подвижным объектом соединен с вторым входом блока 9 расчета времени начала свертывания подвижного объекта на текущей позиции, второй выход блока 7 расчета времени занятия очередной позиции подвижным объектом соединен с первым входом блока 8 моделирования состояния группового подвижного объекта, выход блока 9 расчета времени начала свертывания подвижного объекта на текущей позиции соединен со вторым входом блока 8 моделирования состояния группового подвижного объекта, выход блока 8 моделирования состояния группового подвижного объекта соединен со вторым входом блока 10 сравнения, выход БОЛЬШЕ / РАВНО блока 10 сравнения соединен со вторым входом блока 6 моделирования маневренных действий группового подвижного объекта и первым входом блока 13 расчета времени убытия подвижного объекта с текущей позиции, выход МЕНЬШЕ блока 10 сравнения соединен с входом опроса датчика 11 случайных чисел, выход датчика 11 случайных чисел соединен с входом блока 12 коррекции времени нахождения подвижного объекта на текущей позиции, выход блока 12 коррекции времени нахождения подвижного объекта на текущей позиции соединен со вторым входом блока 13 расчета времени убытия подвижного объекта с текущей позиции, первый выход блока 13 расчета времени убытия подвижного объекта с текущей позиции соединен с третьим входом блока 6 моделирования маневренных действий группового подвижного объекта, второй выход блока 13 расчета времени убытия подвижного объекта с текущей позиции соединен с первым входом блока 15 расчета времени прибытия подвижного объекта к очередной позиции, первый выход блока 15 расчета времени прибытия подвижного объекта к очередной позиции соединен с четвертым входом блока 6 моделирования маневренных действий группового подвижного объекта, второй выход блока 15 расчета времени прибытия подвижного объекта к очередной позиции соединен с третьим управляющим входом регистра 3 сдвига, выход блока 14 расчета времени движения подвижного объекта к очередной позиции соединен с первым входом блока 15 расчета времени прибытия подвижного объекта к очередной позиции, выход блока 6 моделирования маневренных действий группового подвижного объекта соединен со вторым управляющим входом регистра 5 памяти, информационный выход регистра 5 памяти соединен с первым входом блока 16 формирования текущей выборки, выход блока 16 формирования текущей выборки соединен с первым входом блока 17 формирования оптимального варианта расположения подвижных средств защиты, первый выход блока 17 формирования оптимального варианта расположения подвижных средств защиты соединен с первым входом блока 18 формирования оптимального варианта расположения подвижных пунктов управления, второй выход блока 17 формирования оптимального варианта расположения подвижных средств защиты соединен с первым входом блока 20 моделирования группового управления составным подвижным объектом, первый выход блока 18 формирования оптимального варианта расположения подвижных пунктов управления соединен с первым входом блока 19 формирования оптимального варианта расположения подвижных средств радиолокационной разведки, второй выход блока 18 формирования оптимального варианта расположения подвижных пунктов управления соединен со вторым входом блока 20 моделирования группового управления составным подвижным объектом, выход блока 19 формирования оптимального варианта расположения подвижных средств радиолокационной разведки соединен с третьим входом блока 20 моделирования группового управления составным подвижным объектом, выход блока 20 моделирования группового управления составным подвижным объектом соединен с третьим управляющим входом регистра 5 памяти.
Работает устройство для моделирования группового управления составным подвижным объектом в условиях неопределенности следующим образом.
Перед началом моделирования в регистр 3 сдвига загружаются данные в виде следующих информационных массивов.
Первый информационный массив  , содержащий данные для моделирования координат позиций в позиционном районе для группового подвижного объекта: радиус позиционного района Rnp, количество подвижных объектов
, содержащий данные для моделирования координат позиций в позиционном районе для группового подвижного объекта: радиус позиционного района Rnp, количество подвижных объектов  с присвоенными им порядковыми номерами
с присвоенными им порядковыми номерами  , количество очередей позиций для каждого подвижного объекта
, количество очередей позиций для каждого подвижного объекта  с присвоенными им порядковыми номерами
с присвоенными им порядковыми номерами  , минимальное расстояние между позициями подвижных объектов lmin1. При этом, все подвижные объекты, входящие в групповой подвижный объект, являются однотипными, а позиционный район представлен в виде круга с радиусом Rnp.
, минимальное расстояние между позициями подвижных объектов lmin1. При этом, все подвижные объекты, входящие в групповой подвижный объект, являются однотипными, а позиционный район представлен в виде круга с радиусом Rnp.
Второй информационный массив  , содержащий данные для моделирования маневренных действий группового подвижного объекта: математическое ожидание времени развертывания подвижного объекта на текущей позиции
, содержащий данные для моделирования маневренных действий группового подвижного объекта: математическое ожидание времени развертывания подвижного объекта на текущей позиции  , среднеквадратическое отклонение времени развертывания подвижного объекта на текущей позиции
, среднеквадратическое отклонение времени развертывания подвижного объекта на текущей позиции  , математическое ожидание времени дежурства подвижного объекта на текущей позиции
, математическое ожидание времени дежурства подвижного объекта на текущей позиции  , среднеквадратическое отклонение времени дежурства подвижного объекта на текущей позиции
, среднеквадратическое отклонение времени дежурства подвижного объекта на текущей позиции  , математическое ожидание времени свертывания подвижного объекта на текущей позиции
, математическое ожидание времени свертывания подвижного объекта на текущей позиции  , среднеквадратическое отклонение времени свертывания подвижного объекта на текущей позиции
, среднеквадратическое отклонение времени свертывания подвижного объекта на текущей позиции  , математическое ожидание скорости движения подвижного объекта
, математическое ожидание скорости движения подвижного объекта  , среднеквадратическое отклонение скорости движения подвижного объекта
, среднеквадратическое отклонение скорости движения подвижного объекта  и требуемое количество подвижных объектов, одновременно находящихся в состоянии дежурства на позициях
и требуемое количество подвижных объектов, одновременно находящихся в состоянии дежурства на позициях  .
.
Третий информационный массив  , содержащий данные для моделирования маневренных действий подвижных средств защиты, входящих в составной подвижный объект: количество подвижных средств защиты NСЗ, радиус действия подвижного средства защиты RСЗ, математическое ожидание скорости движения подвижного средства защиты
, содержащий данные для моделирования маневренных действий подвижных средств защиты, входящих в составной подвижный объект: количество подвижных средств защиты NСЗ, радиус действия подвижного средства защиты RСЗ, математическое ожидание скорости движения подвижного средства защиты  , среднеквадратическое отклонение скорости движения подвижного средства защиты
, среднеквадратическое отклонение скорости движения подвижного средства защиты  , минимальное расстояние между позициями подвижных средств
, минимальное расстояние между позициями подвижных средств  , входящих в составной подвижный объект. При этом, все подвижные средства защиты, входящие в составной подвижный объект, являются однотипными.
, входящих в составной подвижный объект. При этом, все подвижные средства защиты, входящие в составной подвижный объект, являются однотипными.
Четвертый информационный массив  , содержащий данные для моделирования маневренных действий подвижных пунктов управления, входящих в составной подвижный объект: количество подвижных пунктов управления NПУ, радиус действия подвижного пункта управления RПУ, математическое ожидание скорости движения подвижного пункта управления
, содержащий данные для моделирования маневренных действий подвижных пунктов управления, входящих в составной подвижный объект: количество подвижных пунктов управления NПУ, радиус действия подвижного пункта управления RПУ, математическое ожидание скорости движения подвижного пункта управления  , среднеквадратическое отклонение скорости движения подвижного пункта управления
, среднеквадратическое отклонение скорости движения подвижного пункта управления  , минимальное расстояние между позициями подвижных средств lmin2, входящих в составной подвижный объект. При этом, все подвижные пункты управления, входящие в составной подвижный объект, являются однотипными.
, минимальное расстояние между позициями подвижных средств lmin2, входящих в составной подвижный объект. При этом, все подвижные пункты управления, входящие в составной подвижный объект, являются однотипными.
Пятый информационный массив  , содержащий данные для моделирования маневренных действий подвижных средств радиолокационной разведки, входящих в составной подвижный объект: количество подвижных средств радиолокационной разведки NРЛР, радиус действия подвижного средства радиолокационной разведки RРЛР, математическое ожидание скорости движения подвижного средства радиолокационной разведки
, содержащий данные для моделирования маневренных действий подвижных средств радиолокационной разведки, входящих в составной подвижный объект: количество подвижных средств радиолокационной разведки NРЛР, радиус действия подвижного средства радиолокационной разведки RРЛР, математическое ожидание скорости движения подвижного средства радиолокационной разведки  , среднеквадратическое отклонение скорости движения подвижного средства радиолокационной разведки
, среднеквадратическое отклонение скорости движения подвижного средства радиолокационной разведки  , минимальное расстояние между позициями подвижных средств lmin2, входящих в составной подвижный объект. При этом, все подвижные средства радиолокационной разведки, входящие в составной подвижный объект, являются однотипными.
, минимальное расстояние между позициями подвижных средств lmin2, входящих в составной подвижный объект. При этом, все подвижные средства радиолокационной разведки, входящие в составной подвижный объект, являются однотипными.
При запуске устройства от внешнего источника питания, не показанного на схеме, генератор 1 тактовых импульсов подает импульсы на первый управляющий вход регистра 3 сдвига и вход опроса датчика 2 случайных чисел. Под действием импульсов в датчике 2 случайных чисел на интервале от -Rпр до Rпр генерируются две равномерно распределенные случайные величины ξ1 и ξ2, после чего значения данных случайных величин передаются на первый вход блока 4 формирования каталога координат позиций группового подвижного объекта. Одновременно с этим из первого информационного выхода регистра 3 сдвига на второй вход блока 4 формирования каталога координат позиций группового подвижного объекта подаются данные первого информационного массива М1. На основе полученных значений случайных величин ξ1 и ξ2 в блоке 4 формирования каталога координат позиций группового подвижного объекта последовательно, для каждого i-ого подвижного объекта, по очередям, начиная с j=1 очереди, формируются координаты позиций всех подвижных объектов (xij, yij) с учетом их нахождения в границах позиционного района, представленного в виде окружности с радиусом Rпр, а также минимально допустимого расстояния между данными позициями lmin1:
При выполнении условий (1) и (2) координаты вновь сформированной позиции записываются в каталог координат позиций группового подвижного объекта u0. При невыполнении данных условий полученные координаты в каталог u0 не записываются. Случайные величины ξ1 и ξ2 продолжают генерироваться до тех пор, пока каталог u0 не будет содержать координаты позиций каждого подвижного объекта, входящего в состав группового подвижного объекта, для всего количества выделенных очередей NОЧ.
В результате моделирования в блоке 4 формирования каталога координат позиций группового подвижного объекта формируется каталог координат позиций группового подвижного объекта u0:

Каталог u0 передается на первый управляющий вход регистра 5 памяти, второй управляющий вход регистра 3 сдвига и первый вход блока 6 моделирования маневренных действий группового подвижного объекта.
Маневренные действия группового подвижного объекта представляют собой поочередную смену всеми составляющими его подвижными объектами подготовленных позиций в позиционном районе, координаты которых содержатся в каталоге u0. При этом учитываются ограничения по количеству подвижных объектов, одновременно находящихся в состоянии дежурства на текущих позициях  .
.
Процесс перемещения подвижного объекта от текущей позиции к очередной состоит из последовательного наступления таких событий, как прибытие подвижного объекта к очередной позиции, занятие подвижным объектом текущей позиции, начало свертывания подвижного объекта на текущей позиции и убытие подвижного объекта с текущей позиции. Каждому такому событию соответствует определенный момент времени в общей хронологической последовательности маневренных действий группового подвижного объекта в позиционном районе.
Начало моделирования осуществляется с текущего значения модельного времени tm = 0 и до момента времени Tmod, соответствующего занятию последним подвижным объектом, входящим в групповой объект, последней очереди позиций в позиционном районе.
Времена продолжительности свертывания, развертывания и дежурства подвижного объекта на позиции, а также скорость его движения составляют содержимое второго информационного массива данных М2 и являются случайными величинами, подчиняющимися нормальному закону распределения.
Для моделирования маневренных действий группового подвижного объекта в позиционном районе после формирования каталога координат позиций группового подвижного объекта u0 из второго информационного выхода регистра 3 сдвига на первый вход блока 10 сравнения передается значение требуемого количества подвижных объектов, одновременно находящихся в состоянии дежурства на занимаемых позициях  .
.
Одновременно с этим из третьего информационного выхода регистра 3 сдвига на вход блока 7 расчета времени занятия очередной позиции подвижным объектом передается математическое ожидание времени развертывания подвижного объекта на текущей позиции после прибытия на нее  , среднеквадратическое отклонение времени развертывания подвижного объекта на текущей позиции после прибытия на нее
, среднеквадратическое отклонение времени развертывания подвижного объекта на текущей позиции после прибытия на нее  и времени прибытия подвижного объекта к текущей позиции tпр(ij). При этом, из четвертого информационного выхода регистра 3 сдвига на первый вход блока 9 расчета времени начала свертывания подвижного объекта на текущей позиции передается математическое ожидание времени дежурства подвижного объекта на текущей позиции
и времени прибытия подвижного объекта к текущей позиции tпр(ij). При этом, из четвертого информационного выхода регистра 3 сдвига на первый вход блока 9 расчета времени начала свертывания подвижного объекта на текущей позиции передается математическое ожидание времени дежурства подвижного объекта на текущей позиции  , а также среднеквадратическое отклонение времени дежурства подвижного объекта на текущей позиции
, а также среднеквадратическое отклонение времени дежурства подвижного объекта на текущей позиции  .
.
В блоке 7 расчета времени занятия текущей позиции подвижным объектом осуществляется расчет времени занятия подвижным объектом текущей позиции tзн (ij):

Причем, на момент начала моделирования процесса функционирования группового подвижного объекта (модельное время tm = 0) все подвижные объекты находятся на первой очереди позиций в позиционном районе, из чего следует, что значения времен прибытия подвижных объектов к первой очереди позиции tпр(i1) считается равным нулю.
После начала моделирования маневренных действий группового подвижного объекта значение времени прибытия подвижного объекта к очередной позиции tпр(ij + 1) рассчитывается в блоке 15 расчета времени прибытия подвижного объекта к очередной позиции и через его второй выход передается на третий управляющий вход регистра 3 сдвига.
Полученное в блоке 7 расчета времени занятия текущей позиции подвижным объектом значение времени занятия подвижным объектом текущей позиции tзн (ij) передается на второй вход блока 9 расчета времени начала свертывания подвижного объекта на позиции и первый вход блока 8 расчета состояния группового подвижного объекта.
В блоке 9 расчета времени начала свертывания подвижного объекта на текущей позиции осуществляется расчет времени начала свертывания подвижного объекта на текущей позиции tсв (ij):

Полученное значение tсв(ij) передается на второй вход блока 8 расчета состояния группового подвижного объекта. В блоке 8 расчета состояния группового подвижного объекта осуществляется расчет количества подвижных объектов, одновременно находящихся в состоянии дежурства на занимаемых позициях:

где tm - текущее время моделирования.
Полученное значение  передается на второй вход бока 10 сравнения. В блоке 10 сравнения проверяется выполнение условия:
передается на второй вход бока 10 сравнения. В блоке 10 сравнения проверяется выполнение условия:

При выполнении условия (7) значения tзн(ij) и tсв(ij) через выход БОЛЬШЕ / РАВНО передаются на второй вход блока 6 моделирования маневренных действий группового подвижного объекта, а значение tсв(ij) передается на первый вход блока 13 расчета времени убытия подвижного объекта с текущей позиции. При невыполнении условия (7) возникает необходимость корректировки времени дежурства подвижного объекта на текущей позиции. Для этого через выход МЕНЬШЕ блока 10 сравнения на вход датчика 11 случайных чисел передаются полученные значения tзн(ij) и tсв(ij). В датчике 11 случайных чисел формируется равномерно распределенная случайная величина tкор в диапазоне от tзн(ij) до tсв(ij) и передается на вход блока 12 коррекции времени нахождения подвижного объекта на текущей позиции. В блоке 12 коррекции времени нахождения подвижного объекта на текущей позиции осуществляется расчет скорректированного времени начала свертывания подвижного объекта на текущей позиции  :
:

Полученное значение  передается на второй вход блока 13 расчета времени убытия подвижного объекта с текущей позиции.
передается на второй вход блока 13 расчета времени убытия подвижного объекта с текущей позиции.
Одновременно с этим на третий вход блока 13 расчета времени убытия подвижного объекта с текущей позиции из пятого информационного выхода регистра 3 сдвига передаются значения математического ожидания времени свертывания подвижного объекта на позиции  и среднеквадратического отклонения времени свертывания подвижного объекта на позиции
и среднеквадратического отклонения времени свертывания подвижного объекта на позиции  . В блоке 13 расчета времени убытия подвижного объекта с позиции осуществляется расчет времени убытия подвижного объекта с текущей позиции tуб(ij):
. В блоке 13 расчета времени убытия подвижного объекта с позиции осуществляется расчет времени убытия подвижного объекта с текущей позиции tуб(ij):

Полученное значение tуб(ij) передается на первый вход блока 15 расчета времени прибытия подвижного объекта к очередной позиции и третий вход блока 6 моделирования маневренных действий группового подвижного объекта. Одновременно с этим на вход блока 14 расчета времени движения подвижного объекта к очередной позиции из шестого информационного выхода регистра 3 сдвига передаются значения математического ожидания скорости движения подвижного объекта  и среднеквадратического отклонения скорости движения подвижного объекта
и среднеквадратического отклонения скорости движения подвижного объекта  , а также каталог координат позиций группового подвижного объекта u0. В блоке 14 расчета времени движения подвижного объекта к очередной позиции осуществляется расчет времени движения подвижного объекта к следующей по очереди позиции tдв(ij + 1), при этом, расстояние до очередной позиции рассчитывается по кратчайшей траектории:
, а также каталог координат позиций группового подвижного объекта u0. В блоке 14 расчета времени движения подвижного объекта к очередной позиции осуществляется расчет времени движения подвижного объекта к следующей по очереди позиции tдв(ij + 1), при этом, расстояние до очередной позиции рассчитывается по кратчайшей траектории:

Полученное значение tдв(ij + 1) передается на второй вход блока 15 расчета времени прибытия подвижного объекта к очередной позиции, в котором осуществляется расчет времени прибытия подвижного объекта к следующей по очереди позиции tпр(ij + 1):

Полученное значение tпр(ij + 1) передается на четвертый вход блока 6 моделирования маневренных действий группового подвижного объекта и третий управляющий вход регистра 3 сдвига для осуществления дальнейших расчетов.
Процесс расчета всех вышеперечисленных времен ((4)-(5), (8)-(11)) осуществляется для всех очередей позиций каждого подвижного объекта.
На основании полученных данных в блоке 6 моделирования маневренных действий группового подвижного объекта осуществляется формирование каталога маневренных действий u1, содержащего хронологическую последовательность времен прибытия подвижных объектов к очередным позициям, занятия подвижными объектами текущих позиций, начала свертывания подвижных объектов на текущих позициях и убытия подвижных объектов к очередным позициям для всех выделенных им очередей позиций в позиционном районе:

Полученный каталог маневренных действий их по тактирующему сигналу передается на второй управляющий вход регистра 5 памяти.
Для моделирования группового управления составным подвижным объектом, осуществляющим защиту группового подвижного объекта от средств поражения в условиях неопределенности его местоположения в позиционном районе, из информационного выхода регистра 5 памяти каталог маневренных действий u1 передается на вход блока 16 формирования текущей выборки.
В блоке 16 формирования текущей выборки на основе каталога u1 формируется каталог u(tm), представляющий собой выборку занятых подвижными объектами на момент времени tm позиций, координат данных позиций, времен их занятия подвижными объектами и убытия с них, а также координаты позиций следующей очереди и времена их занятия подвижными объектами:

При этом общее количество занятых подвижными объектами позиций  на момент времени tm вычисляется по формуле:
на момент времени tm вычисляется по формуле:

При выполнении условий (13)-(14) каждой позиции, на которой находится на момент времени tm подвижный объект, присваивается порядковый номер  , после чего формируется каталог u(tm):
, после чего формируется каталог u(tm):

Сформированный каталог u(tm) передается на первый вход блока 17 формирования оптимального варианта расположения подвижных средств защиты. Одновременно с этим на второй вход блока 17 формирования оптимального варианта расположения подвижных средств защиты из седьмого информационного выхода регистра 3 сдвига передаются данные третьего информационного массива М3.
Оптимальный вариант расположения подвижных средств защиты в позиционном районе  зависит от расположения прикрываемого группового подвижного объекта на момент времени
зависит от расположения прикрываемого группового подвижного объекта на момент времени  представляет собой каталог координат позиций, при расположении на которых подвижных средств защиты на момент времени tm общий сектор прикрытия группового подвижного объекта достигает максимального значения:
представляет собой каталог координат позиций, при расположении на которых подвижных средств защиты на момент времени tm общий сектор прикрытия группового подвижного объекта достигает максимального значения:

Значение общего сектора прикрытия группового подвижного объекта  рассчитывается по формуле:
рассчитывается по формуле:

где  - общее количество подвижных средств защиты, на момент времени tm находящихся в состоянии дежурства;
- общее количество подвижных средств защиты, на момент времени tm находящихся в состоянии дежурства;
 - суммарный сектор прикрытия всех позиции, на момент времени tm занятых элементами группового подвижного объекта, всеми подвижными средствами защиты, находящимися в состоянии дежурства;
- суммарный сектор прикрытия всех позиции, на момент времени tm занятых элементами группового подвижного объекта, всеми подвижными средствами защиты, находящимися в состоянии дежурства;
θ - порядковый номер подвижного средства защиты, находящегося на момент времени tm в состоянии дежурства на k-ой позиции в позиционном районе  .
.
k - порядковый номер позиции, на которой на момент времени tm находится θ-ое средство защиты в состоянии дежурства.
Общее количество подвижных средств защиты, на момент времени tm находящихся в состоянии дежурства  , рассчитывается по формуле:
, рассчитывается по формуле:

Суммарный сектор прикрытия всех позиции, на момент времени tm занятых элементами группового подвижного объекта, всеми подвижными средствами защиты, находящимися в состоянии дежурства,  определяется по формуле:
определяется по формуле:

где γμθk(tm) - сектор прикрытия μ-й позиции, занятой подвижным объектом, θ-ым средством защиты, находящимся на момент времени tm в состоянии дежурства на k-ой позиции в позиционном районе 
Сектор прикрытия μ-й позиции θ-ым средством защиты, находящимся на момент времени tm в состоянии дежурства на k-ой позиции в позиционном районе γμθk(tm) представляет собой угол, образованный лучами, выходящими из центра μ-й позиций и являющимися касательными к зоне действия θ-ого подвижного средства защиты, находящегося на момент времени tm в состоянии дежурства на k-ой позиции, и вычисляется по формуле:

где Lμθk(tm) - расстояние от k-ой позиции θ-ого подвижного средства защиты до μ-й позиции, занятой подвижным объектом на момент времени tm;
RСЗ - радиус действия подвижного средства защиты.
При этом считается, что любое средство поражения, наносящее удар по групповому подвижному объекту и попавшее в сектор прикрытия γμθk, считается уничтоженным.
Величина сектора прикрытия γμθk зависит от расстояния между μ-ой позицией, занятой подвижным объектом, и k-ой позицией θ-ого подвижного средства защиты Lμθk:

где (хμ, уμ} - координаты позиции, занятой подвижным объектом на момент времени tm;
(xθk, yθk) - координаты k-ой позиции θ-го подвижного средства защиты в позиционном районе на момент времени tm.
С осуществлением маневренных действий групповым подвижным объектом (12) в позиционном районе осуществляется расчет очередных координат позиций для подвижных средств защиты исходя из значения общего сектора прикрытия группового объекта  . Для этого при перемещении подвижных объектов, входящих в состав группового подвижного объекта, на очередные позиции в позиционном районе осуществляется перерасчет общего сектора прикрытия группового подвижного объекта
. Для этого при перемещении подвижных объектов, входящих в состав группового подвижного объекта, на очередные позиции в позиционном районе осуществляется перерасчет общего сектора прикрытия группового подвижного объекта  , причем координаты текущей позиции (xij,yij), с которой убыл подвижный объект, заменяются координатами очередной позиции, на которую убыл подвижный объект (xij+1, yij+1) на основании данных, содержащихся в каталоге u(tm) (15). Если значение общего сектора прикрытия
, причем координаты текущей позиции (xij,yij), с которой убыл подвижный объект, заменяются координатами очередной позиции, на которую убыл подвижный объект (xij+1, yij+1) на основании данных, содержащихся в каталоге u(tm) (15). Если значение общего сектора прикрытия  с учетом координат очередной позиции подвижного объекта (xij+1, yij+1) больше или равно значению сектора прикрытия
с учетом координат очередной позиции подвижного объекта (xij+1, yij+1) больше или равно значению сектора прикрытия  , рассчитанного при нахождении подвижного объекта на текущей позиции (xij,yij), то перерасчет координат позиций подвижных средств защиты не осуществляется. В противном случае на основании формул (17)-(21) осуществляется расчет новых координат позиций для подвижных средств защиты, а времени убытия θ-го подвижного средства защиты с текущей позиции
, рассчитанного при нахождении подвижного объекта на текущей позиции (xij,yij), то перерасчет координат позиций подвижных средств защиты не осуществляется. В противном случае на основании формул (17)-(21) осуществляется расчет новых координат позиций для подвижных средств защиты, а времени убытия θ-го подвижного средства защиты с текущей позиции  соответствует время убытия подвижного объекта на очередную позицию tуб (ij):
соответствует время убытия подвижного объекта на очередную позицию tуб (ij):

Время прибытия на очередную k+1-ую позицию θ-то подвижного средства защиты  рассчитывается по формуле:
рассчитывается по формуле:

При этом считается, что на момент времени tm = 0 все подвижные средства защиты находятся на занимаемых позициях в состоянии дежурства.
Таким образом, исходя из формул (17)-(23), в блоке 17 формирования оптимального варианта расположения подвижных средств защиты осуществляется решение оптимизационной задачи по определению оптимального варианта расположения подвижных средств защиты  , представляющего собой каталог, содержащий такие координаты позиций в позиционном районе, при размещении на которых подвижных средств защиты с учетом расположения элементов группового подвижного объекта на момент времени tm (15), а также минимального расстояния между данными позициями lmin2, времен их занятия и убытия с них, значение общего сектора прикрытия группового подвижного объекта
, представляющего собой каталог, содержащий такие координаты позиций в позиционном районе, при размещении на которых подвижных средств защиты с учетом расположения элементов группового подвижного объекта на момент времени tm (15), а также минимального расстояния между данными позициями lmin2, времен их занятия и убытия с них, значение общего сектора прикрытия группового подвижного объекта  принимает максимальное значение (16):
принимает максимальное значение (16):

Полученный каталог передается на первый вход блока 18 формирования оптимального варианта расположения подвижных пунктов управления и первый вход блока 20 моделирования группового управления составным подвижным объектом. Одновременно с этим на второй вход блока 18 формирования оптимального варианта расположения подвижных пунктов управления из восьмого информационного выхода регистра 3 сдвига передаются данные четвертого информационного массива М4.
На основании полученных данных в блоке 18 формирования оптимального варианта расположения подвижных пунктов управления осуществляется формирование оптимального варианта расположения подвижных пунктов управления  , представляющего собой каталог, содержащий координаты позиций подвижных пунктов управления, а также времена их занятия подвижными пунктами управления и убытия с них:
, представляющего собой каталог, содержащий координаты позиций подвижных пунктов управления, а также времена их занятия подвижными пунктами управления и убытия с них:

где  - время прибытия l-ого подвижного пункта управления на ν-ю позицию;
- время прибытия l-ого подвижного пункта управления на ν-ю позицию;
 - время убытия l-ого подвижного пункта управления с ν-ой позиции;
- время убытия l-ого подвижного пункта управления с ν-ой позиции;
 - общее количество подвижных пунктов управления, на момент времени tm находящихся в состоянии дежурства.
- общее количество подвижных пунктов управления, на момент времени tm находящихся в состоянии дежурства.
Координаты позиций подвижных пунктов управления рассчитываются с учетом ограничений по расстоянию между занятыми ими позициями и позициями, занятыми подвижными средствами защиты на момент времени tm:

где Lkν - расстояние между k-ой позицией θ-ого подвижного средства защиты и ν-ой позицией l-ого подвижного пункта управления на момент времени tm;
Lll+l - расстояние между позициями l-ого и l+1-ого подвижными пунктами управления на момент времени tm.
Вышеперечисленные расстояния рассчитываются по следующим формулам:

Общее количество подвижных пунктов управления, на момент времени tm находящихся в состоянии дежурства  , рассчитывается по формуле:
, рассчитывается по формуле:

Времени убытия l-ого подвижного пункта управления с текущей позиции  соответствует время убытия k-ого подвижного средства защиты с θ-ой занимаемой позиции
соответствует время убытия k-ого подвижного средства защиты с θ-ой занимаемой позиции  :
:

Время прибытия на очередную ν+1-ую позицию l-ого подвижного пункта управления рассчитывается по формуле:

При этом считается, что на момент времени tm = 0 все подвижные пункты управления находятся на занимаемых позициях в состоянии дежурства.
Сформированный на основании формул (26)-(32) каталог  (25) передается на первый вход блока 19 формирования оптимального варианта расположения подвижных средств радиолокационной разведки и на второй вход блока 20 моделирования группового управления составным подвижным объектом.
(25) передается на первый вход блока 19 формирования оптимального варианта расположения подвижных средств радиолокационной разведки и на второй вход блока 20 моделирования группового управления составным подвижным объектом.
Одновременно с этим на второй вход блока 19 формирования оптимального варианта расположения подвижных средств радиолокационной разведки из девятого информационного выхода регистра 3 сдвига передаются данные пятого информационного массива М5.
На основании полученных данных в блоке 19 формирования оптимального варианта расположения подвижных средств радиолокационной разведки осуществляется формирование оптимального варианта расположения подвижных средств радиолокационной разведки  , представляющего собой каталог, содержащий координаты позиций подвижных средств радиолокационной разведки, а также времена их занятия и убытия с них:
, представляющего собой каталог, содержащий координаты позиций подвижных средств радиолокационной разведки, а также времена их занятия и убытия с них:

где  - время прибытия s-ого подвижного средства радиолокационной разведки на η-ю позицию;
- время прибытия s-ого подвижного средства радиолокационной разведки на η-ю позицию;
 - время убытия s-ого подвижного средства радиолокационной разведки с η-ой позиции;
- время убытия s-ого подвижного средства радиолокационной разведки с η-ой позиции;
 - общее количество подвижных средств радиолокационной разведки, на момент времени tm находящихся в состоянии дежурства.
- общее количество подвижных средств радиолокационной разведки, на момент времени tm находящихся в состоянии дежурства.
Данные координаты позиций рассчитываются с учетом ограничений по расстоянию между позициями подвижных пунктов управления и средств радиолокационной разведки на момент времени tm:

где Lην - расстояние между η-ой позицией s-ого подвижного средства радиолокационной разведки и ν-ой позицией l-ого подвижного пункта управления на момент времени tm;
Lss+1 _ расстояние между позициями s-ого и s+1-ого подвижными средствами радиолокационной разведки на момент времени tm.
Вышеперечисленные расстояния рассчитываются по следующим формулам:
Общее количество подвижных средств радиолокационной разведки, на момент времени tm находящихся в состоянии дежурства  , рассчитывается по формуле:
, рассчитывается по формуле:

Времени убытия s-ого подвижного средства радиолокационной разведки с текущей позиции  соответствует время убытия k-ого подвижного средства защиты с θ-ой занимаемой позиции
соответствует время убытия k-ого подвижного средства защиты с θ-ой занимаемой позиции  :
:

Время прибытия на очередную η+1-ую позицию k-ого подвижного средства радиолокационной разведки рассчитывается по формуле:

При этом считается, что на момент времени tm = 0 все подвижные средства радиолокационной разведки находятся на занимаемых позициях в состоянии дежурства.
Сформированный на основании формул (34)-(40) каталог  (33) передается на третий вход блока 20 моделирования группового управления составным подвижным объектом.
(33) передается на третий вход блока 20 моделирования группового управления составным подвижным объектом.
Групповое управление составным подвижным объектом представляет собой организацию поочередного перемещения составляющих его элементов между позициями в целях организации эффективного прикрытия группового подвижного объекта от воздействия средств поражения исходя из складывающихся во времени условий обстановки в позиционном районе.
Эффективность прикрытия группового подвижного объекта от воздействия средств поражения характеризуется максимизацией общего сектора прикрытия группового подвижного объекта  , величина которого зависит от взаимного расположения на момент времени tm элементов группового подвижного объекта, так и подвижных средств защиты, пунктов управления и радиолокационной разведки, образующих составной подвижный объект.
, величина которого зависит от взаимного расположения на момент времени tm элементов группового подвижного объекта, так и подвижных средств защиты, пунктов управления и радиолокационной разведки, образующих составной подвижный объект.
В блоке 20 моделирования группового управления составным подвижным объектом на основе полученных каталогов  и
и  осуществляется формирование оптимального варианта расположения подвижного составного объекта
осуществляется формирование оптимального варианта расположения подвижного составного объекта  в позиционном районе, представляющего собой каталог, содержащий координаты позиций всех элементов, входящих в составной подвижный объект, а также времена занятия данных позиций и убытия с них:
в позиционном районе, представляющего собой каталог, содержащий координаты позиций всех элементов, входящих в составной подвижный объект, а также времена занятия данных позиций и убытия с них:

Содержимое каталога  характеризует процесс группового управления разнотипными элементами, входящими в составной подвижный объект, в течении модельного времени Tmod. Оптимальное размещение элементов составного подвижного объекта с учетом динамично меняющейся обстановки в позиционном районе оказывает непосредственное влияние на эффективность прикрытия группового объекта, функционирующего в позиционном районе в условиях неопределенности.
характеризует процесс группового управления разнотипными элементами, входящими в составной подвижный объект, в течении модельного времени Tmod. Оптимальное размещение элементов составного подвижного объекта с учетом динамично меняющейся обстановки в позиционном районе оказывает непосредственное влияние на эффективность прикрытия группового объекта, функционирующего в позиционном районе в условиях неопределенности.
Полученный каталог  (41) передается на третий управляющий вход регистра 5 памяти.
(41) передается на третий управляющий вход регистра 5 памяти.
Таким образом, благодаря введению новых блоков и связей, достигается требуемый технический результат - расширение функциональных возможностей за счет моделирования группового управления составным подвижным объектом в условиях неопределенности с учетом его новых свойств.
Источники информации, принятые во внимание
1. Патент на изобретение RU №2298825, 2005;
2. Патент на изобретение RU №2544761,2013;
3. Патент на изобретение RU №2728501, 2020;
4. Искусственный интеллект: современный подход, 4-е изд., том 1. Решение проблем: знания и рассуждения.: Пер. с англ. - Спб.: ООО «Диалектика», 2021. - 704 с. - Парал. тит. англ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования состояния группового объекта в условиях неопределенности | 2023 |
|
RU2832491C1 |
| Устройство для моделирования каталога разведки подвижных объектов | 2019 |
|
RU2710300C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КАТАЛОГА РАЗВЕДКИ РАЗНОТИПНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2544761C1 |
| Устройство для моделирования процесса обнаружения подвижного объекта | 2019 |
|
RU2701077C1 |
| СПОСОБ АКТИВНОЙ ЗАЩИТЫ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2015 |
|
RU2601241C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КАТАЛОГА РАЗВЕДКИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2353970C1 |
| ГЕНЕРАТОР, ИМИТИРУЮЩИЙ ПОМЕХОВЫЕ СИГНАЛЫ ОТ ДИПОЛЬНЫХ ОТРАЖАТЕЛЕЙ | 2006 |
|
RU2310883C1 |
| Устройство для моделирования состояний отдельного объекта в условиях неопределенности | 2019 |
|
RU2728501C1 |
| Устройство для формирования каталога результатов моделирования процесса функционирования средств противовоздушной обороны | 2021 |
|
RU2758248C1 |
| Система обработки радиолокационной информации | 2016 |
|
RU2648257C1 |
Изобретение относится к области вычислительной техники. Технический результат заключается в обеспечении объектового прикрытия группового объекта в условиях неопределенности его местоположения в позиционном районе от воздействия средств воздушного нападения. Технический результат достигается за счет устройства для моделирования группового управления составным подвижным объектом в условиях неопределенности, содержащего генератор тактовых импульсов, датчик случайных чисел, регистр сдвига, блок формирования каталога координат позиций группового подвижного объекта, регистр памяти, блок моделирования маневренных действий группового подвижного объекта, блок расчета времени занятия очередной позиции подвижным объектом, блок моделирования состояния группового подвижного объекта, блок расчета времени начала свертывания подвижного объекта на текущей позиции, блок сравнения, датчик случайных чисел, блок коррекции времени нахождения подвижного объекта на текущей позиции, блок расчета времени убытия подвижного объекта с текущей позиции, блок расчета времени движения подвижного объекта к очередной позиции, блок расчета времени прибытия подвижного объекта к очередной позиции, блок формирования текущей выборки, блок формирования оптимального варианта расположения подвижных средств защиты, блок формирования оптимального варианта расположения подвижных пунктов управления, блок формирования оптимального варианта расположения подвижных средств радиолокационной разведки, блок моделирования группового управления составным подвижным объектом. 1 ил.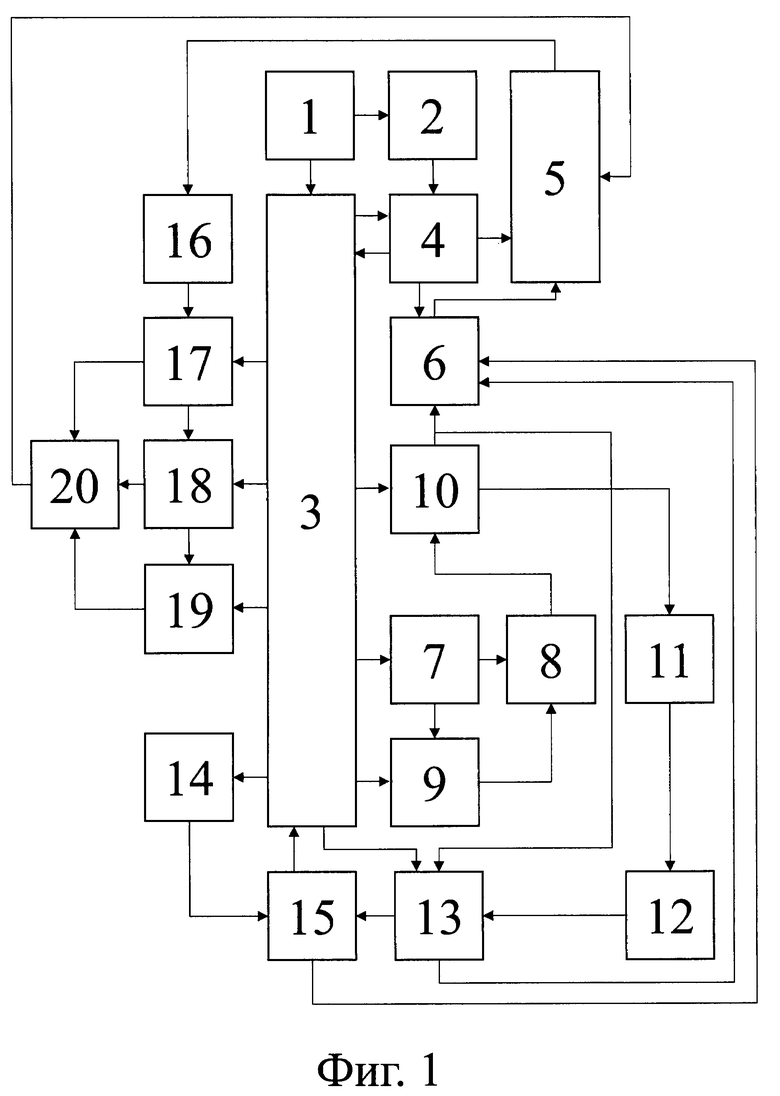
Устройство для моделирования группового управления составным подвижным объектом в условиях неопределенности, содержащее генератор тактовых импульсов, датчик случайных чисел, блок сравнения, регистр сдвига, регистр памяти, датчик случайных чисел, отличающееся тем, что в него дополнительно введены блок формирования каталога координат позиций группового подвижного объекта, блок расчета времени занятия очередной позиции подвижным объектом, блок расчета времени начала свертывания подвижного объекта на текущей позиции, блок моделирования состояния группового подвижного объекта, блок коррекции времени нахождения подвижного объекта на позиции, блок расчета времени убытия подвижного объекта с текущей позиции, блок расчета времени движения подвижного объекта к очередной позиции, блок расчета времени прибытия подвижного объекта к очередной позиции, блок моделирования маневренных действий группового подвижного объекта, блок формирования текущей выборки, блок формирования оптимального варианта расположения подвижных средств защиты, блок формирования оптимального варианта расположения подвижных пунктов управления, блок формирования оптимального варианта расположения подвижных средств радиолокационной разведки, блок моделирования группового управления составным подвижным объектом, при этом первый вход блока формирования каталога координат позиций группового подвижного объекта соединен с выходом датчика случайных чисел, второй вход блока формирования каталога координат позиций группового подвижного объекта соединен с первым информационным выходом регистра сдвига, первый выход блока формирования каталога координат позиций группового подвижного объекта соединен с первым входом регистра памяти, второй выход блока формирования каталога координат позиций группового подвижного объекта соединен со вторым управляющим входом регистра сдвига, третий выход блока формирования каталога координат позиций группового подвижного объекта соединен с первым входом блока моделирования маневренных действий группового подвижного объекта, третий информационный выход регистра сдвига соединен с входом блока расчета времени занятия очередной позиции подвижным объектом, первый выход блока расчета времени занятия очередной позиции подвижным объектом соединен со вторым входом блока расчета времени начала свертывания подвижного объекта на текущей позиции, второй выход блока расчета времени занятия очередной позиции подвижным объектом соединен с первым входом блока моделирования состояния группового подвижного объекта, первый вход блока расчета времени начала свертывания подвижного объекта на текущей позиции соединен с четвертым информационным выходом регистра сдвига, выход блока расчета времени начала свертывания подвижного объекта на текущей позиции соединен со вторым входом блока моделирования состояния группового подвижного объекта, выход блока моделирования состояния группового подвижного объекта соединен со вторым входом блока сравнения, вход блока коррекции времени нахождения подвижного объекта на текущей позиции соединен с выходом датчика случайных чисел, выход блока коррекции времени нахождения подвижного объекта на текущей позиции соединен со вторым входом блока расчета времени убытия подвижного объекта с текущей позиции, первый вход блока расчета времени убытия подвижного объекта с текущей позиции соединен с выходом БОЛЬШЕ/РАВНО блока сравнения, третий вход блока расчета времени убытия подвижного объекта с текущей позиции соединен с пятым информационным выходом регистра сдвига, первый выход блока расчета времени убытия подвижного объекта с текущей позиции соединен с третьим входом блока моделирования маневренных действий группового подвижного объекта, второй выход блока расчета времени убытия подвижного объекта с текущей позиции соединен с первым входом блока расчета времени прибытия подвижного объекта к очередной позиции, вход блока расчета времени движения подвижного объекта к очередной позиции соединен с шестым информационным выходом регистра сдвига, выход блока расчета времени движения подвижного объекта к очередной позиции соединен со вторым входом блока расчета времени прибытия подвижного объекта к очередной позиции, первый выход блока расчета времени прибытия подвижного объекта к очередной позиции соединен с четвертым входом блока моделирования маневренных действий группового подвижного объекта, второй выход блока расчета времени прибытия подвижного объекта к очередной позиции соединен с третьим управляющим входом регистра сдвига, второй вход блока моделирования маневренных действий группового подвижного объекта соединен с выходом БОЛЬШЕ/РАВНО блока сравнения, выход блока моделирования маневренных действий группового подвижного объекта соединен со вторым входом регистра памяти, информационный выход регистра памяти соединен с входом блока формирования текущей выборки, выход блока текущей выборки соединен с первым входом блока формирования оптимального варианта расположения подвижных средств защиты, второй вход блока формирования оптимального варианта расположения подвижных средств защиты соединен с седьмым информационным выходом регистра сдвига, первый выход блока формирования оптимального варианта расположения подвижных средств защиты соединен с первым входом блока формирования оптимального варианта расположения подвижных пунктов управления, второй выход блока формирования оптимального варианта расположения подвижных средств защиты соединен с первым входом блока моделирования группового управления составным подвижным объектом, второй вход блока формирования оптимального варианта расположения подвижных пунктов управления соединен с восьмым информационным выходом регистра сдвига, первый выход блока формирования оптимального варианта расположения подвижных пунктов управления соединен с первым входом блока формирования оптимального варианта расположения подвижных средств радиолокационной разведки, второй выход блока формирования оптимального варианта расположения подвижных пунктов управления соединен со вторым входом блока моделирования группового управления составным подвижным объектом, второй вход блока формирования оптимального варианта расположения подвижных средств радиолокационной разведки соединен с девятым информационным выходом регистра сдвига, выход блока формирования оптимального варианта расположения подвижных средств радиолокационной разведки соединен с третьим входом блока моделирования группового управления составным подвижным объектом, выход блока моделирования группового управления составным подвижным объектом соединен с третьим входом регистра памяти.
| Устройство для моделирования состояний отдельного объекта в условиях неопределенности | 2019 |
|
RU2728501C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПРИНЯТИЯ РЕШЕНИЯ В УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ | 2013 |
|
RU2534924C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПРИНЯТИЯ РЕШЕНИЯ В УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ | 2012 |
|
RU2517243C1 |
| Устройство для моделирования каталога разведки подвижных объектов | 2019 |
|
RU2710300C1 |
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |

