Изобретение относится к автоматике и вычислительной технике и может быть использовано в специализированных устройствах вычислительной техники для моделирования процесса обнаружения подвижного объекта космическим аппаратом (КА).
Известны своим практическим использованием устройства, моделирующие процесс обнаружения подвижных объектов, космическими аппаратами.
Недостатком устройства, моделирующего процесс обнаружения подвижных объектов космическими аппаратами, являются:
невозможность представления данных с результатами моделирования в формализованном виде;
отсутствие возможности оформления каталога для проведения последующих исследований;
Наиболее близким по технической сущности является (RU №2320013 С1) принцип работы которого основан на использовании математического аппарата при распределении ошибок, а именно нормального закона распределения, а также кругового закона в процессе обнаружения.
Применение подобных устройств ограничивается отсутствием интерфейса, позволяющего пользователю обрабатывать и анализировать данные полученные в ходе работы устройства
Задачей изобретения является создание блоков, позволяющих формировать каталог с выходными данными, а также позволяющие пользователю взаимодействовать с данными полученными в результате работы устройства.
Требуемый технический результат достигается тем, что в устройство, содержащее, блок хранения векторов, введены блок расчета сферического линейного расстояния на местности, блок расчета высоты орбиты КА, блок расчета угла отклонения проецирующего луча от местной вертикали, блок расчета предельного линейного разрешения и блок расчета вероятности обнаружения подвижного объекта, блок обработки результата процесса обнаружения подвижного объекта, блок подсчета временных показателей цикла обнаружения, блок индикации результатов обнаружения, регистр при этом, первый выход блока хранения векторов соединен с первым входом блока расчета сферического линейного расстояния на местности и вторым входом блока расчета высоты орбиты КА, а второй выход блока хранения векторов соединен с третьем входом блока расчета сферического линейного расстояния на местности, выход блока расчета высоты орбиты КА соединен с первым входом блока расчета угла отклонения проецирующего луча от местной вертикали и пятым входом блока расчета предельного линейного разрешения, выход блока расчета сферического линейного расстояния на местности соединен с третьим входом блока расчета угла отклонения проецирующего луча от местной вертикали и вторым входом блока расчета предельного линейного разрешения, выход блока расчета угла отклонения проецирующего луча от местной вертикали соединен с первым входом блока расчета предельного линейного разрешения, выход которого соединен с первым входом блока расчета вероятности обнаружения подвижного объекта, выход которого соединен с первым входом блока обработки результата процесса обнаружения подвижного объекта, первый выход которого соединен с регистром, второй выход блока обработки процесса обнаружения подвижного объекта соединен с блоком индикации результатов обнаружения, а третий выход соединен с блоком подсчета временных показателей цикла обнаружения объекта, выход которого соединен с регистром.
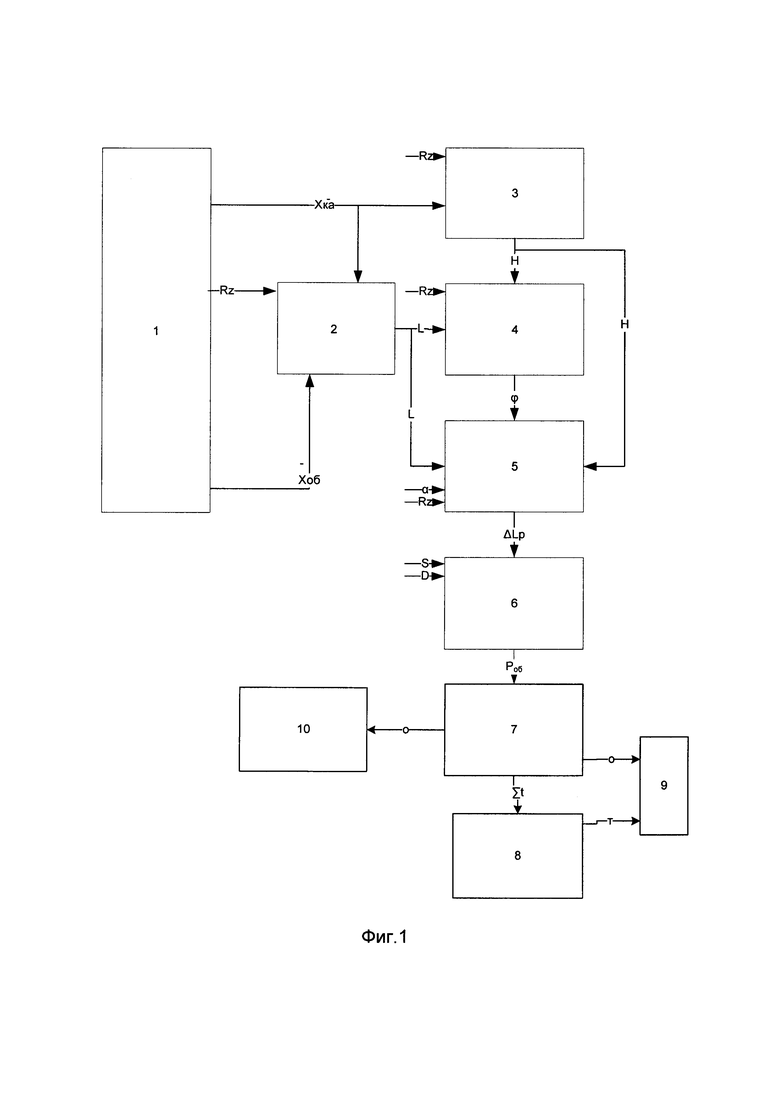
Сущность изобретения поясняется чертежом, где на фиг. 1 представлен возможный вариант построения устройства, который содержит:
1 - блок хранения векторов;
2 - блок расчета сферического линейного расстояния на местности;
3 - блок расчета высоты орбиты КА;
4 - блок расчета угла отклонения проецирующего луча от местной вертикали;
5 - блок расчета предельного линейного разрешения;
6 - блок расчета вероятности обнаружения подвижного объекта;
7 - блок обработки результата процесса обнаружения подвижного объекта;
8 - блок подсчета временных показателей цикла обнаружения;
9 - блок индикации результатов обнаружения;
10 - регистр.
Устройство для моделирования процесса обнаружения подвижного объекта работает следующим образом: Предполагается, что имеется РЛС регистрирующая координаты КА на момент времени t в геостационарной системе координат -  и имеется датчик на подвижном объекте, который определяет его координаты в той же системе координат -
и имеется датчик на подвижном объекте, который определяет его координаты в той же системе координат -  В блоке хранения векторов 1 находятся вектора
В блоке хранения векторов 1 находятся вектора  на момент времени t.
на момент времени t.
Затем, на первый и третий вход блока расчета сферического линейного расстояния на местности 2, передаются данные из первого и второго выхода блока хранения векторов 1 о местоположении КА и подвижного объекта в геоцентрической системе координат, соответственно. На второй вход блока расчета сферического линейного расстояния на местности 2 подано значение Rz - радиус Земли. В блоке расчета сферического линейного расстояния на местности 2 по формуле (1) рассчитывается значение L - сферическое линейное расстояние на местности от подспутниковой точки до подвижного объекта.

где  - вектор характеризующий положение КА в геоцентрической системе координат на момент времени t;
- вектор характеризующий положение КА в геоцентрической системе координат на момент времени t;
 - вектор характеризующий положение подвижного объекта на местности в геоцентрической системе координат на момент времени t. Так же на второй вход блока расчета высоты орбиты КА 3 передается из первого выхода блока хранения векторов 1 значение
- вектор характеризующий положение подвижного объекта на местности в геоцентрической системе координат на момент времени t. Так же на второй вход блока расчета высоты орбиты КА 3 передается из первого выхода блока хранения векторов 1 значение  и на первый вход блок расчета высоты орбиты КА подано значение Rz. В данном блоке по формуле (2) рассчитывается значение Н - высоты орбиты КА над поверхностью Земли.
и на первый вход блок расчета высоты орбиты КА подано значение Rz. В данном блоке по формуле (2) рассчитывается значение Н - высоты орбиты КА над поверхностью Земли.

Далее, на первый и третий входы блока расчета угла отклонения проецирующего луча от местной вертикали 4 из выходов блоков расчета высоты орбиты КА 3 и расчета сферического линейного расстояния на местности 2 передаются значения Н и L соответственно. На второй вход блока расчета угла отклонения проецирующего луча от местной вертикали 4 подано значение Rz. В блоке расчета угла отклонения проецирующего луча от местной вертикали 4 по формуле (3) осуществляется расчет ϕ - угол отклонения проецирующего луча от местной вертикали.

После расчета ϕ, данное значение из выхода блока расчета угла отклонения проецирующего луча от местной вертикали 4 передается на первый вход блока расчета предельного линейного разрешения 5. Так же на третий вход данного блока передаются значения α - половина угла мгновенного поля зрения аппаратуры разведки установленной на КА (характеристика аппаратуры разведки установленной на КА), а на четвертый вход блока расчета предельного линейного разрешения 5 подано значение Rz. Из выходов блока расчета сферического линейного расстояния на местности 2 и блока расчета высоты орбиты КА 3 на второй и пятый вход блока расчета предельного линейного разрешения 5 передаются значения L и Н соответственно. В блоке расчета предельного линейного разрешения 5 по формуле (4) осуществляется расчет Δlp - предельного линейного разрешения.

Вероятность обнаружения подвижного объекта Роб зависит от соотношения размеров обнаруживаемого объекта и предельного разрешения в изображении подвижного объекта на снимке, таким образом, после расчета значения Δlp из выхода блока расчета предельного линейного разрешения 5 данное значение передается на первый вход блока расчета вероятности обнаружения подвижного объекта 6, так же на второй и третий входы данного блока передается значения S - ширина подвижного объекта и D - длина подвижного объекта, соответственно. В блоке расчета вероятности обнаружения подвижного объекта 6 по формуле (5) осуществляется расчет Роб - вероятности обнаружения подвижного объекта.

После расчета Роб из выхода блока расчета вероятности обнаружения подвижного объекта 6, данное значение передается, на первый вход блока обработки результата процесса обнаружения подвижного объекта 7.
В блоке обработки результата процесса обнаружения подвижного объекта 7 происходит сравнение значений ζ и Роб. Если ζ≤Роб то считается, что подвижный объект обнаружен, где ζ=0.8 - заданное значение вероятности при котором объект считается обнаруженным, после, данный результат подается на второй вход регистра 9 и на вход блока индикации результатов обнаружения 10.
В блоке подсчета временных показателей цикла обнаружения объекта 8 происходит суммирование времени выполнения всех блоков по формуле t1+t2+…+tn=Т где n - номер блока, после расчета данное значение подается на первый вход регистра 9.
В блоке индикации результатов обнаружения 10 происходит подача сигнала на индикаторы, зеленого - если объект обнаружен и красного, если не обнаружен.
Указанный алгоритм расчета вероятности обнаружения подвижного объекта реализуется следующим образом.
При запуске устройства от внешнего источника, не показанного на чертеже, в блок хранения векторов 1 передаются координаты КА в геоцентрической системе координат -  и текущие координаты подвижного объекта в геоцентрической системе координат -
и текущие координаты подвижного объекта в геоцентрической системе координат -  на момент времени t.
на момент времени t.
На первый и третий вход блока расчета сферического линейного расстояния на местности 2, передаются данные из первого и второго выхода блока хранения векторов 1 о местоположении КА -  и подвижного объекта в геоцентрической системе координат -
и подвижного объекта в геоцентрической системе координат -  соответственно. На второй вход блока расчета сферического линейного расстояния на местности 2 подано значение Rz - радиус Земли. В блоке расчета сферического линейного расстояния на местности 2 по формуле (1) рассчитывается значение L - сферическое линейное расстояние на местности от подспутниковой точки до подвижного объекта.
соответственно. На второй вход блока расчета сферического линейного расстояния на местности 2 подано значение Rz - радиус Земли. В блоке расчета сферического линейного расстояния на местности 2 по формуле (1) рассчитывается значение L - сферическое линейное расстояние на местности от подспутниковой точки до подвижного объекта.
На второй вход блока расчета высоты орбиты КА 3 передается из первого выхода блока хранения векторов 1 значение  и на первый вход блок расчета высоты орбиты КА подано значение Rz. В данном блоке по формуле (2) рассчитывается значение Н - высоты орбиты КА над поверхностью Земли.
и на первый вход блок расчета высоты орбиты КА подано значение Rz. В данном блоке по формуле (2) рассчитывается значение Н - высоты орбиты КА над поверхностью Земли.
На первый и третий входы блока расчета угла отклонения проецирующего луча от местной вертикали 4 из выходов блоков расчета высоты орбиты КА 3 и расчета сферического линейного расстояния на местности 2 передаются значения Н и L соответственно. На второй вход блока расчета угла отклонения проецирующего луча от местной вертикали 4 подано значение Rz. В блоке расчета угла отклонения проецирующего луча от местной вертикали 4 по формуле (3) осуществляется расчет ϕ - угол отклонения проецирующего луча от местной вертикали.
После расчета ϕ, данное значение из выхода блока расчета угла отклонения проецирующего луча от местной вертикали 4 передается на первый вход блока расчета предельного линейного разрешения 5. Так же на третий вход данного блока передаются значения α - половина угла мгновенного поля зрения аппаратуры разведки, установленной на КА (характеристика аппаратуры разведки, установленной на КА), а на четвертый вход блока расчета предельного линейного разрешения 5 подано значение Rz. Из выходов блока расчета сферического линейного расстояния на местности 2 и блока расчета высоты орбиты КА 3 на второй и пятый вход блока расчета предельного линейного разрешения 5 передаются значения L и Н соответственно. В блоке расчета предельного линейного разрешения 5 по формуле (4) осуществляется расчет Δlp -предельного линейного разрешения.
Вероятность обнаружения подвижного объекта Роб зависит от соотношения размеров обнаруживаемого объекта и предельного разрешения в изображении подвижного объекта на снимке, таким образом, после расчета значения Δlp из выхода блока расчета предельного линейного разрешения 5 данное значение передается на первый вход блока расчета вероятности обнаружения подвижного объекта 6, так же на второй и третий входы данного блока передается значения S - ширина подвижного объекта и D - длина подвижного объекта, соответственно. В блоке расчета вероятности обнаружения подвижного объекта 6 по формуле (5) осуществляется расчет Роб - вероятности обнаружения подвижного объекта, значение которой подается, на первый вход блока обработки результата процесса обнаружения подвижного объекта 7.
В блоке обработки результата процесса обнаружения подвижного объекта 7 происходит сравнение значений ζ и Роб. Если ζ≤Роб то считается, что подвижный объект обнаружен, данный результат подается на второй вход регистра 9 и на вход блока индикации результатов обнаружения 10.
В блоке подсчета временных показателей цикла обнаружения объекта 8 происходит суммирование времени выполнения всех блоков по формуле t1+t2+…+tn=Т и данное значение подается на первый вход регистра 9,
В блоке индикации результатов обнаружения 10 происходит подача сигнала на индикаторы, зеленого - если объект обнаружен и красного, если не обнаружен.
Источники информации, принятые во внимание
1. RU №2214624 2003 г.
2. RU №1809436 1993 г.
3. RU №2320013 2006 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ОБНАРУЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2320013C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КАТАЛОГА РАЗВЕДКИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2353970C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КАТАЛОГА РАЗВЕДКИ РАЗНОТИПНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2544761C1 |
| Устройство для моделирования комбинаций разнотипных подвижных объектов | 2017 |
|
RU2643623C1 |
| Устройство для моделирования состояний отдельного объекта в условиях неопределенности | 2019 |
|
RU2728501C1 |
| Устройство и способ для обнаружения оптических дефектов деталей конструкционной оптики | 2021 |
|
RU2789204C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2729339C1 |
Изобретение относится к области автоматики и вычислительной техники. Технический результат заключается в обеспечении возможности моделирования процесса обнаружения космическим аппаратом подвижного объекта. Технический результат достигается за счет устройства для моделирования процесса обнаружения подвижного объекта, содержащего блок хранения векторов, блок расчета сферического линейного расстояния на местности, блок расчета высоты орбиты КА, блок расчета угла отклонения проецирующего луча от местной вертикали, блок расчета предельного линейного разрешения и блок расчета вероятности обнаружения подвижного объекта, блок обработки результата процесса обнаружения подвижного объекта, блок подсчета временных показателей цикла обнаружения, блок индикации результатов обнаружения, регистр. 1 ил.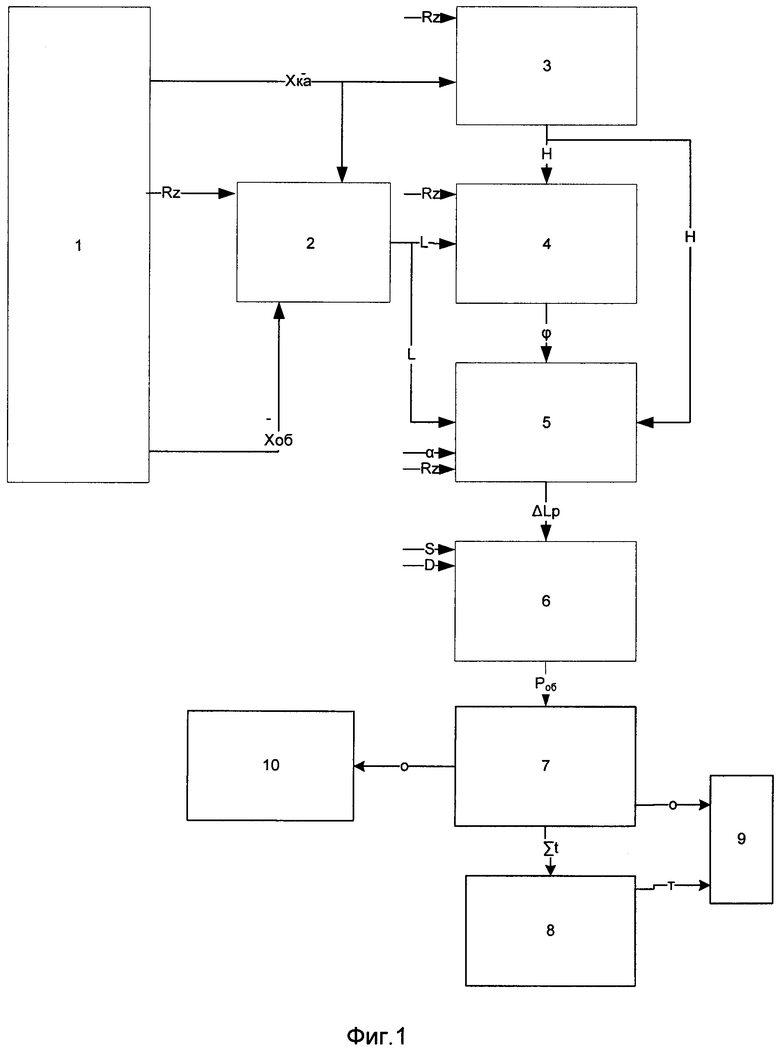
Устройство для моделирования процесса обнаружения подвижного объекта, содержащее блок хранения векторов, отличающееся тем, что в него дополнительно введены блок расчета сферического линейного расстояния на местности, блок расчета высоты орбиты КА, блок расчета угла отклонения проецирующего луча от местной вертикали, блок расчета предельного линейного разрешения и блок расчета вероятности обнаружения подвижного объекта, блок обработки результата процесса обнаружения подвижного объекта, блок подсчета временных показателей цикла обнаружения, блок индикации результатов обнаружения, регистр, при этом первый выход блока хранения векторов соединен с первым входом блока расчета сферического линейного расстояния на местности и вторым входом блока расчета высоты орбиты КА, а второй выход блока хранения векторов соединен с третьем входом блока расчета сферического линейного расстояния на местности, выход блока расчета высоты орбиты КА соединен с первым входом блока расчета угла отклонения проецирующего луча от местной вертикали и пятым входом блока расчета предельного линейного разрешения, выход блока расчета сферического линейного расстояния на местности соединен с третьим входом блока расчета угла отклонения проецирующего луча от местной вертикали и вторым входом блока расчета предельного линейного разрешения, выход блока расчета угла отклонения проецирующего луча от местной вертикали соединен с первым входом блока расчета предельного линейного разрешения, выход которого соединен с первым входом блока расчета вероятности обнаружения подвижного объекта, выход которого соединен с первым входом блока обработки результата процесса обнаружения подвижного объекта, первый выход которого соединен с регистром, второй выход блока обработки процесса обнаружения подвижного объекта соединен с блоком индикации результатов обнаружения, а третий выход соединен с блоком подсчета временных показателей цикла обнаружения объекта, выход которого соединен с регистром, на второй вход расчета сферического линейного расстояния на местности и первый вход блока расчета высоты орбиты КА и на второй вход блока расчета угла отклонения проецирующего луча от местной вертикали и четвертый вход блока расчета предельного линейного разрешения подано значение Rz - радиуса Земли, а на второй и третий входы блока расчета вероятности обнаружения подвижного объекта подаются значения S - ширины подвижного объекта, и D - длины подвижного объекта, соответственно, а на третий вход блока расчета предельного линейного разрешения подано значение α - половина угла мгновенного поля зрения аппаратуры разведки, установленной на КА, на первый вход блока обработки результата процесса обнаружения подвижного объекта подано значение Роб - вероятности обнаружения подвижного объекта, а на первый и второй выходы подается значение О - результат процесса обнаружения, на второй и на третий выходы подается  , где tn - время обработки блока n, на выход блока подсчета временных показателей цикла обнаружения объекта подается значение Т - время цикла обнаружения.
, где tn - время обработки блока n, на выход блока подсчета временных показателей цикла обнаружения объекта подается значение Т - время цикла обнаружения.
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ОБНАРУЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2320013C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПРИНЯТИЯ РЕШЕНИЙ | 2002 |
|
RU2214624C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2298825C1 |
| Устройство для моделирования комбинаций разнотипных подвижных объектов | 2017 |
|
RU2643623C1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

