Изобретение относится к специализированным устройствам вычислительной техники и может быть использовано для моделирования различных состояний отдельного объекта в условиях неопределенности его функционирования.
Известно устройство [1], которое позволяет моделировать процесс перемещения подвижного объекта в зависимости от времени суток.
Недостатком устройства является относительно узкие функциональные возможности, не позволяющие моделировать состояния отдельного объекта в условиях неопределенности.
Известно устройство [2], которое позволяет моделировать каталог разведки подвижных объектов.
Недостатком устройства является относительно узкие функциональные возможности, не позволяющие моделировать состояния отдельного объекта в условиях неопределенности.
Наиболее близким к заявляемому устройству является устройство [3], которое позволяет моделировать каталог разведки разнотипных подвижных объектов.
Недостатком наиболее близкого технического решения является относительно узкие функциональные возможности, не позволяющие моделировать состояния отдельного объекта в условиях неопределенности.
Требуемый технический результат - расширение функциональных возможностей путем обеспечения моделирования различных состояний объекта, занесенных в каталог разведки разнотипных подвижных объектов, в условиях неопределенности.
Требуемый технический результат достигается тем, что в устройство, содержащее генератор тактовых импульсов, датчик случайных чисел, блок расчета вероятности обнаружения подвижного объекта, блок сравнения, регистр сдвига, блок расчета размеров подвижного объекта, генератор тактовых импульсов, блок расчета квадратов отклонений размеров подвижного объекта, блок определения типа подвижного объекта, блок расчета координат подвижного объекта, регистр памяти, при этом, выход генератора тактовых импульсов соединен с входом опроса датчика случайных чисел и управляющим входом регистра сдвига, выход датчика случайных чисел соединен с первым входом блока сравнения, выход блока расчета вероятности обнаружения подвижного объекта соединен со вторым входом блока сравнения, а выход МЕНЬШЕ блока сравнения соединен с управляющим входом блока расчета размеров подвижного объекта и с первым входом регистра памяти, первый информационный выход регистра сдвига соединен с первым входом блока расчета координат подвижного объекта, второй информационный выход регистра сдвига соединен с входом блока расчета вероятности обнаружения подвижного объекта, третий и четвертый информационный выход регистра сдвига соединен с входом блока расчета размеров подвижного объекта, а пятый информационный выход регистра сдвига соединен с первым входом блока расчета квадратов отклонений размеров подвижного объекта, управляющий выход блока расчета размеров подвижного объекта соединен с управляющим входом генератора тактовых импульсов, а информационных выход блока расчета размеров подвижного объекта соединен с входом блока расчета квадратов отклонений размеров подвижного объекта, выход генератора тактовых импульсов соединен со вторым управляющим входом регистра сдвига, выход блока расчета квадратов отклонений размеров подвижного объекта соединен с информационным входом блока определения типа подвижного объекта, выход блока определения типа подвижного объекта соединен со вторым информационным входом регистра памяти, выход блока расчета координат подвижного объекта соединен с первым информационным входом регистра памяти, на второй вход блока расчета координат подвижного объекта подано значение среднего квадратического отклонения ошибки определения координат подвижного объекта, введены третий генератор тактовых импульсов, второй датчик случайных чисел, блок логического сравнения, блок расчета вероятности состояний объекта, третий датчик случайных чисел, блок расчета состояния вероятности необнаруженного объекта, блок расчета состояния вероятности обнаруженного объекта, блок расчета переходных вероятностей, блок интенсивности воздействия на объект, блок расчета состояния объекта, при этом второй выход блока определения типа подвижного объекта соединен с третьим входом регистра сдвига, шестой выход регистра сдвига соединен со входом третьего генератора случайных чисел, первый выход третьего генератора случайных чисел соединен со входом второго датчика случайных чисел, а второй выход третьего генератора случайных чисел соединен со входом третьего датчика случайных чисел, выход третьего датчика случайных чисел соединен со входом блока расчета состояния вероятности необнаруженного объекта, выход второго датчика случайных чисел соединен с первым входом блока логического сравнения, седьмой выход регистра сдвига соединен со входом блока расчета вероятности состояний объекта, а выход блока расчета вероятности состояний объекта соединен со вторым входом блока логического сравнения, выход блока логического сравнения соединен со входом блока расчета состояния вероятности обнаруженного объекта, выход блока расчета состояния вероятности необнаруженного объекта соединен с первым входом блока расчета переходных вероятностей, а выход блока расчета состояния вероятности обнаруженного объекта соединен со вторым входом блока расчета переходных вероятностей, выход блока расчета переходных вероятностей соединен со входом блока интенсивности воздействия на объект, выход блока интенсивности воздействия на объект соединен со вторым входом блока расчета состояния объекта, восьмой выход регистра сдвига соединен с первым входом блока расчета состояния объекта, выход блока расчета состояния объекта соединен с четвертым входом регистра памяти.
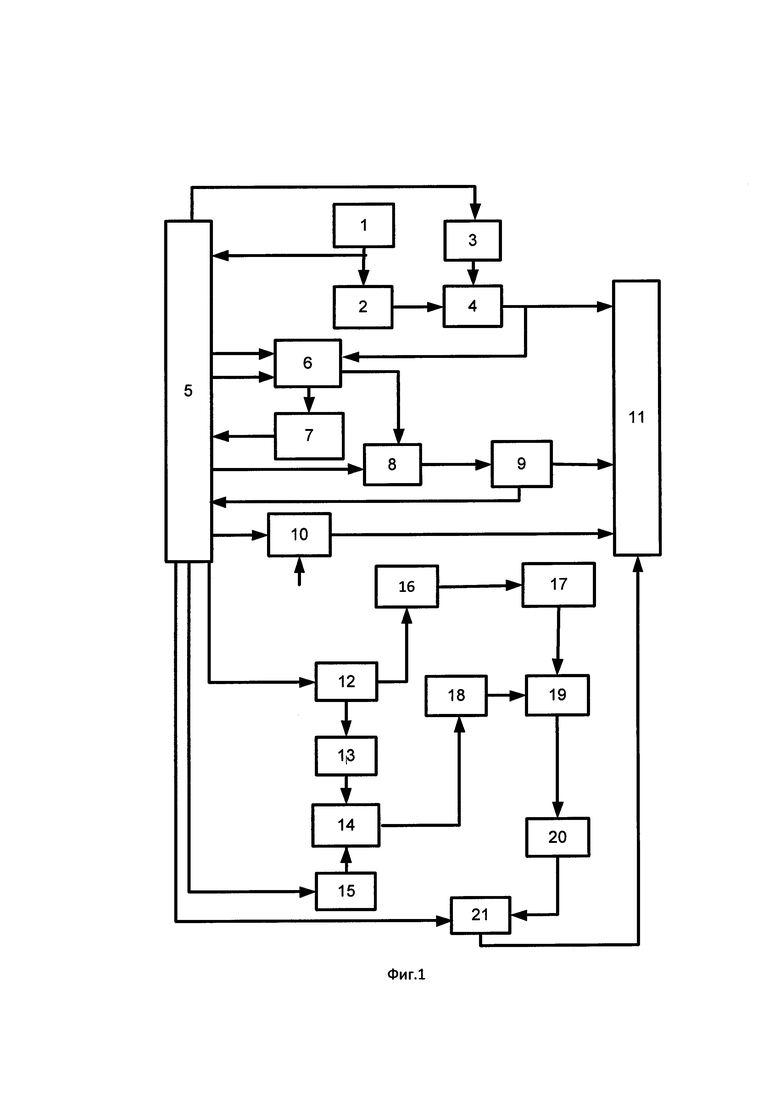
Сущность изобретения поясняется чертежом, где на фиг. 1. представлена структурная схема устройства для моделирования состояний отдельного объекта в условиях неопределенности.
Устройство для моделирования состояний отдельного объекта в условиях неопределенности содержит генератор 1 тактовых импульсов, датчик 2 случайных чисел, блок 3 расчета вероятности обнаружения подвижного объекта, блок 4 сравнения, регистр 5 сдвига, блок 6 расчета размеров подвижного объекта, генератор 7 тактовых импульсов, блок 8 расчета квадратов отклонений размеров подвижного объекта, блок 9 определения типа подвижного объекта, блок 10 расчета координат подвижного объекта, регистр 11 памяти, генератор 12 тактовых импульсов, датчик 13 случайных чисел, блок 14 логического сравнения, блок 15 расчета вероятности состояний объекта, датчик 16 случайных чисел, блок 17 расчета состояния вероятности необнаруженного объекта, блок 18 расчета состояния вероятности обнаруженного объекта, блок 19 расчета переходных вероятностей, блок 20 интенсивности воздействия на объект, блок 21 расчета состояния объекта.
При этом выход генератора 1 тактовых импульсов соединен с входом опроса датчика 2 случайных чисел и управляющим входом регистра 5 сдвига, выход датчика 2 случайных чисел соединен с первым входом блока 4 сравнения, выход блока 3 расчета вероятности обнаружения подвижного объекта соединен со вторым входом блока 4 сравнения, а выход МЕНЬШЕ блока 4 сравнения соединен с управляющим входом регистра 11 памяти и блока 6 расчета размеров подвижного объекта, первый информационный выход регистра 5 сдвига соединен с первым входом блока 10 расчета координат подвижного объекта, второй информационный выход регистра 5 сдвига соединен с входом блока 3 расчета вероятности обнаружения подвижного объекта, третий и четвертый информационный выход регистра 5 сдвига соединен с входом блока 6 расчета размеров подвижного объекта, пятый информационный выход регистра 5 сдвига соединен с входом блока 8 расчета квадратов отклонений размеров подвижного объекта, шестой выход регистра 5 сдвига соединен со входом генератора 12 тактовых импульсов, седьмой выход регистра 5 сдвига соединен со входом блока 15 расчета вероятности состояний объекта, а восьмой выход регистра 5 сдвига соединен с первым входом блока 21 расчета состояния объекта, управляющий выход блока 6 расчета размеров подвижного объекта соединен с управляющим входом генератора 7 тактовых импульсов, а информационных выход блока 6 расчета размеров подвижного объекта соединен с входом блока 8 расчета квадратов отклонений размеров подвижного объекта, выход генератора 7 тактовых импульсов соединен со вторым управляющим входом регистра 5 сдвига, выход блока 8 расчета квадратов отклонений размеров подвижного объекта соединен с информационным входом блока 9 определения типа подвижного объекта, первый выход блока 9 определения типа подвижного объекта соединен со вторым информационным входом регистра 11 памяти, а второй выход блока 9 определения типа подвижного объекта соединен с третьим входом регистра 5 сдвига, выход блока 10 расчета координат подвижного объекта соединен с третьим входом регистра 11 памяти, на второй вход блока 10 расчета координат подвижного объекта подано значение среднего квадратического отклонения ошибки определения координат подвижного объекта, первый выход генератора 12 тактовых импульсов соединен со входом датчика 13 случайных чисел, а второй выход генератора 12 тактовых импульсов соединен со входом датчика 16 случайных чисел, выход датчика 13 случайных чисел соединен с первым входом блока 14 логического сравнения, выход блока 14 логического сравнения соединен со входом блока 18 расчета состояния вероятности обнаруженного объекта, выход блока 15 расчета вероятности состояний объекта соединен со вторым входом блока 14 логического сравнения, выход датчика 16 случайных чисел соединен со входом блока 17 расчета состояния вероятности необнаруженного объекта, выход блока 17 расчета состояния вероятности необнаруженного объекта соединен с первым входом блока 19 расчета переходных вероятностей, выход блока 18 расчета состояния вероятности обнаруженного объекта, выход блока 19 расчета переходных вероятностей соединен со входом блока 20 интенсивности воздействия на объект, выход блока 20 интенсивности воздействия на объект соединен со вторым входом блока 21 расчета состояния объекта, а выход блока 21 расчета состояния объекта соединен с четвертым входом регистра 11 памяти.
Работает устройство для состояний отдельного объекта в условиях неопределенности следующим образом.
Предполагается, что имеются три вектора: вектор  содержащий географические координаты местоположения (широту х, долготу y), длину D, ширину S и предельное линейное разрешение на некотором фоне
содержащий географические координаты местоположения (широту х, долготу y), длину D, ширину S и предельное линейное разрешение на некотором фоне  n подвижных объектов, средние квадратические отклонения ошибки измерения длины σD и ширины σS; вектор
n подвижных объектов, средние квадратические отклонения ошибки измерения длины σD и ширины σS; вектор  содержащий математические ожидания длины M[Dj] и ширины M[Sj] для каждого из m типов подвижных объектов; вектор
содержащий математические ожидания длины M[Dj] и ширины M[Sj] для каждого из m типов подвижных объектов; вектор  содержащий характеристики мощности воздействия qr и точность σr их доставки к объекту
содержащий характеристики мощности воздействия qr и точность σr их доставки к объекту  где θ - общее количество средств воздействия.
где θ - общее количество средств воздействия.
Указанные значения перед началом работы устройства загружается в регистр 5 сдвига в виде массива чисел.
При запуске устройства от внешнего источника, не показанного на чертеже, генератор 1 тактовых импульсов выдает импульсы на вход датчика 2 случайных чисел, в котором генерируются равномерно распределенные числа ζ1 в интервале от 0 до 1, которые последовательно передаются на вход блока 4 сравнения.
Известно что, вероятность обнаружения подвижного объекта Роб на некотором фоне зависит от соотношения размеров (ширина, длина) обнаруживаемого объекта и предельного линейного разрешения в изображении подвижного объекта [2]. В блоке 3 расчета вероятности обнаружения подвижного объекта осуществляется расчет вероятности обнаружения i-го подвижного объекта.
В блоке 4 происходит сравнение значений ξ1 и Pобi. Если выполнятся условие ξ1<Pобi, то считается, что i-й подвижный объект обнаружен. Выполнению этого условия соответствует уровень логической единицы на выходе блока 4 сравнения [3], а непосредственное значение вероятности Pобi передается в регистр 5 сдвига.
Одновременно, в блоке 10 расчета координат подвижного объекта [2] определяются возможные координаты местоположения обнаруженного подвижного объекта (Xpi, Ypi) и передаются в регистр 11 памяти, где они записываются в него.
Одновременно, возможные результаты измерения длины Di* и ширины Si* обнаруженного подвижного объекта в блоке 6 расчета размеров подвижного объекта определяются по формулам:


где νD=N[0, σD] и νS=N[0, σS] - случайные величины, распределенные по нормальному закону распределения с математическими ожиданиями равными 0 и средними квадратическими отклонениями σD и σS соответственно.
Возможные результаты измерения длины Di* и ширины Si* обнаруженного подвижного объекта передаются в блок 8 расчета квадратов отклонений размеров подвижного объекта. Одновременно, в данный блок по тактирующему сигналу от генератора 7 тактовых импульсов поступают из регистра 5 математические ожидания длины  и ширины
и ширины  для каждого из m типов подвижных объектов. В блоке 8 расчета квадратов отклонений размеров подвижного объекта производится расчет суммы квадратов отклонений измеренных ширины и длины обнаруженного подвижного объекта от математических ожиданий ширины и длины, соответствующих каждому из m типов подвижного объекта по формуле:
для каждого из m типов подвижных объектов. В блоке 8 расчета квадратов отклонений размеров подвижного объекта производится расчет суммы квадратов отклонений измеренных ширины и длины обнаруженного подвижного объекта от математических ожиданий ширины и длины, соответствующих каждому из m типов подвижного объекта по формуле:

где j=[1,m] - номер типа подвижного объекта.
Величины квадратов отклонений размеров подвижного объекта Δj для каждого из m типов поступают в блок 9 определения типа подвижного объекта, в котором происходит их сравнение и определяется номер типа подвижного объекта k, соответствующий минимальному значению квадратов отклонений:

Номер типа подвижного объекта k передается в регистр 11, где он записываются в него, причем, запись возможных координат местоположения обнаруженного подвижного объекта (Xpi, Ypi) и его типа k в регистр 11 производится по тактирующему сигналу от генератора 1 тактовых импульсов.
В регистре 5 сдвига при получении номера типа подвижного объекта k через генератор 12 тактового импульса выдается импульс на вход датчика 13 случайных чисел, в котором генерируются равномерно распределенные числа ξ2 от 0 до 1, и передаются в блок 14 логического сравнения.
Одновременно по сигналу генератора 1 тактовых импульсов из регистра 5 сдвига передаются в блок 21 расчета состояний объекта значения вероятности Pобi.
Одновременно в блок 15 расчета вероятности состояния объекта в процессе его обнаружения по сигналу генератора 12 тактовых импульсов передаются основные параметры мощности всех имеющихся средств воздействия qr, точности σr его доставки к объекту:  В блоке 15 рассчитываются вероятности состояния объекта:
В блоке 15 рассчитываются вероятности состояния объекта:

где qr - мощность средства воздействия, Мт;
Rзi - радиус приведенной зоны поражения i-го объекта, км;
ΔPнi - характеристика защищенности i-го объекта, кг/см2.
Рассчитанные значения вероятностей  передаются в блок 14 логического сравнения, где происходит их сравнение со значением ξ2, передаваемых из датчика 13 случайных чисел. Если выполняется условие
передаются в блок 14 логического сравнения, где происходит их сравнение со значением ξ2, передаваемых из датчика 13 случайных чисел. Если выполняется условие  то считается, что i-й подвижный объект находится в обнаруженном состоянии. Выполнению этого условия соответствует уровень логической единицы на выходе логического блока 14 сравнения.
то считается, что i-й подвижный объект находится в обнаруженном состоянии. Выполнению этого условия соответствует уровень логической единицы на выходе логического блока 14 сравнения.
Непосредственные значения вероятностей  передаются в блок 18 расчета состояния вероятностей обнаруженного объекта в результате применения средств воздействия по нему, где осуществляется расчет значения переходной вероятности P11 состояния объекта выражением:
передаются в блок 18 расчета состояния вероятностей обнаруженного объекта в результате применения средств воздействия по нему, где осуществляется расчет значения переходной вероятности P11 состояния объекта выражением:

Одновременно через генератор 12 тактовых импульсов выдается импульс на вход датчика 16 случайных чисел, в котором генерируются равномерно распределенные числа ξ3 от 0 до 1 и которые передаются в блок 17 расчета состояния вероятности необнаруженного объекта.
В блоке 17 если выполняется условие ξ3>(1-Pобi), то считается, что i-й подвижный объект не обнаружен, а сгенерированное число ξ3 считается переходной вероятностью P22 состояния объекта в необнаруженном состоянии, то есть

которое передается в блок 19 расчета переходных вероятностей.
В блоке 19 расчета переходных вероятностей при получении значений вероятностей P11 и P22 от блоков 17 и 18 рассчитываются значения переходных вероятностей объекта в обнаруженном P1 и необнаруженном P2 состояниях выражениями:


и составляется матрица переходных вероятностей состояний объекта:

которые передаются в блок 20 интенсивности воздействия на объект.
В блоке 20 определяется начальное состояние объекта до осуществления имитации воздействия на объект, которое соответствует вероятности, поступающей из регистра 5 сдвига P1(0)=Pобi задается количество средств воздействия выражением

где  N - количество средств воздействия (до 10 штук).
N - количество средств воздействия (до 10 штук).
Значения переходных вероятностей объекта из матрицы J и имитации воздействия t на объект передаются в блок 21 расчета состояний объекта.
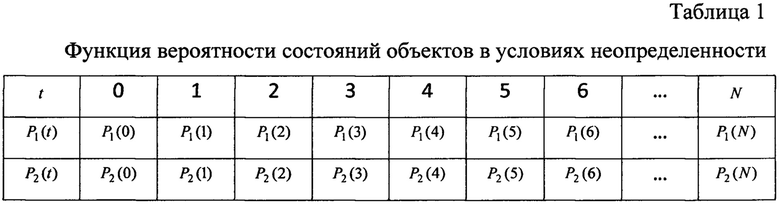
В блоке 21 значения вероятностей i-го объекта в обнаруженном P1 и необнаруженном P2 состояниях определяются выражениями:


Рассчитанные значения состояний отдельного объекта фиксируются в виде функции вероятностей, вид которой представлен в табл. 1.
После окончания расчетов значений вероятностей в регистр 11 памяти передаются значения вероятностей состояния объекта в условиях неопределенности.
Число генерирующих импульсов генератора 1 тактовых импульсов соответствует числу n ячеек регистра 5 сдвига, число генерирующих импульсов генератора 7 тактовых импульсов соответствует числу m ячеек регистра 5 сдвига, а число генерирующих импульсов генератора 12 тактовых импульсов соответствует числу t ячеек регистра 5 сдвига. При окончании генерации в регистре 11 памяти сформировались вероятности состояния отдельного объекта в условиях неопределенности.
Таким образом, благодаря введению новых блоков и связей достигается требуемый технический результат - расширение функциональных возможностей за счет моделирования состояния отдельного объекта в условиях неопределенности.
Источники информации принятые во внимание
1. Патент на изобретение RU №2298825 кл. 7 G06F 17/00.
2. Патент на изобретение RU №2353970 кл. 7 G06F 17/18.
3. Патент на изобретение RU №2544761, 2013 года
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования состояния группового объекта в условиях неопределенности | 2023 |
|
RU2832491C1 |
| Устройство для моделирования комбинаций разнотипных подвижных объектов | 2017 |
|
RU2643623C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КАТАЛОГА РАЗВЕДКИ РАЗНОТИПНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2544761C1 |
| Устройство для моделирования каталога разведки подвижных объектов | 2019 |
|
RU2710300C1 |
| Устройство для моделирования группового управления составным подвижным объектом в условиях неопределенности | 2025 |
|
RU2841258C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КАТАЛОГА РАЗВЕДКИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2353970C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2298825C1 |
| ЦИФРОВОЙ ИМИТАТОР СЛУЧАЙНЫХ СИГНАЛОВ | 2019 |
|
RU2718417C1 |
| Устройство для моделирования канала передачи дискретной информации | 1985 |
|
SU1273943A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ХАРАКТЕРИСТИК ЗОНЫ НАЧАЛЬНОГО ПОИСКА СВЯЗНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2003 |
|
RU2242790C1 |
Изобретение относится к специализированным устройствам вычислительной техники и может быть использовано для моделирования процесса изменения состояний отдельного обнаруженного объекта, записанных в каталог разведки разнотипных подвижных объектов, в условиях воздействия на него. Техническим результатом является обеспечение моделирования состояний отдельного объекта в условиях неопределенности. Устройство содержит три генератора тактовых импульсов, три датчика случайных чисел, блок расчета вероятности обнаружения подвижного объекта, блок сравнения, регистр сдвига, блок расчета размеров подвижного объекта, блок расчета квадратов отклонений размеров подвижного объекта, блок определения типа подвижного объекта, блок расчета координат подвижного объекта, регистр памяти, блок логического сравнения, блок расчета вероятности состояний объекта, блок расчета состояния вероятности необнаруженного объекта, блок расчета состояния вероятности обнаруженного объекта, блок расчета переходных вероятностей, блок интенсивности воздействия на объект, блок расчета состояния объекта. 1 табл., 1 ил.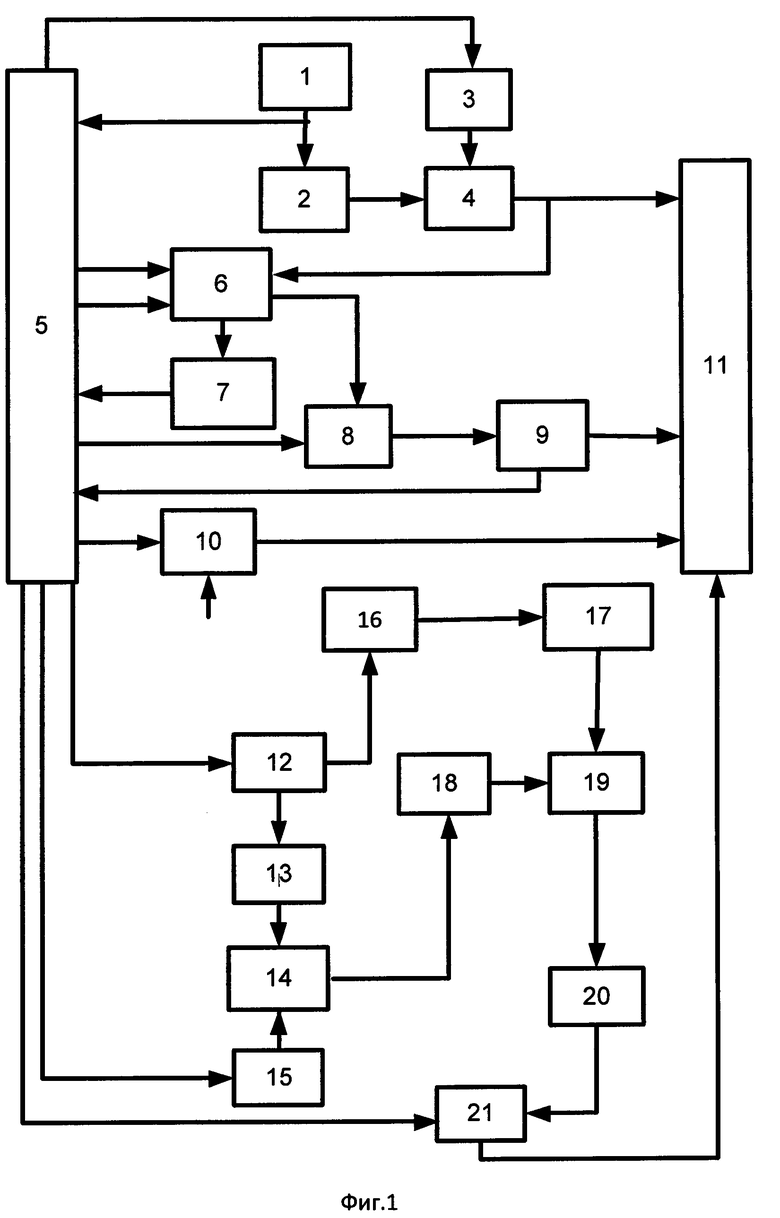
Устройство для моделирования состояний отдельного объекта в условиях неопределенности, содержащее генератор тактовых импульсов, датчик случайных чисел, блок расчета вероятности обнаружения подвижного объекта, блок сравнения, регистр сдвига, блок расчета размеров подвижного объекта, генератор тактовых импульсов, блок расчета квадратов отклонений размеров подвижного объекта, блок определения типа подвижного объекта, блок расчета координат подвижного объекта, регистр памяти, при этом выход генератора тактовых импульсов соединен с входом опроса датчика случайных чисел и управляющим входом регистра сдвига, выход датчика случайных чисел соединен с первым входом блока сравнения, выход блока расчета вероятности обнаружения подвижного объекта соединен со вторым входом блока сравнения, а выход МЕНЬШЕ блока сравнения соединен с управляющим входом блока расчета размеров подвижного объекта и с первым входом регистра памяти, первый информационный выход регистра сдвига соединен с первым входом блока расчета координат подвижного объекта, второй информационный выход регистра сдвига соединен с входом блока расчета вероятности обнаружения подвижного объекта, третий и четвертый информационный выход регистра сдвига соединен с входом блока расчета размеров подвижного объекта, а пятый информационный выход регистра сдвига соединен с первым входом блока расчета квадратов отклонений размеров подвижного объекта, управляющий выход блока расчета размеров подвижного объекта соединен с управляющим входом генератора тактовых импульсов, а информационных выход блока расчета размеров подвижного объекта соединен с входом блока расчета квадратов отклонений размеров подвижного объекта, выход генератора тактовых импульсов соединен со вторым управляющим входом регистра сдвига, выход блока расчета квадратов отклонений размеров подвижного объекта соединен с информационным входом блока определения типа подвижного объекта, выход блока определения типа подвижного объекта соединен со вторым информационным входом регистра памяти, выход блока расчета координат подвижного объекта соединен с первым информационным входом регистра памяти, на второй вход блока расчета координат подвижного объекта подано значение среднего квадратического отклонения ошибки определения координат подвижного объекта, отличающееся тем, что в него дополнительно введены третий генератор тактовых импульсов, второй датчик случайных чисел, блок логического сравнения, блок расчета вероятности состояний объекта, третий датчик случайных чисел, блок расчета состояния вероятности необнаруженного объекта, блок расчета состояния вероятности обнаруженного объекта, блок расчета переходных вероятностей, блок интенсивности воздействия на объект, блок расчета состояния объекта, при этом второй выход блока определения типа подвижного объекта соединен с третьим входом регистра сдвига, шестой выход регистра сдвига соединен с входом третьего генератора случайных чисел, первый выход третьего генератора случайных чисел соединен с входом второго датчика случайных чисел, а второй выход третьего генератора случайных чисел соединен с входом третьего датчика случайных чисел, выход третьего датчика случайных чисел соединен с входом блока расчета состояния вероятности необнаруженного объекта, выход второго датчика случайных чисел соединен с первым входом блока логического сравнения, седьмой выход регистра сдвига соединен с входом блока расчета вероятности состояний объекта, а выход блока расчета вероятности состояний объекта соединен со вторым входом блока логического сравнения, выход блока логического сравнения соединен с входом блока расчета состояния вероятности обнаруженного объекта, выход блока расчета состояния вероятности необнаруженного объекта соединен с первым входом блока расчета переходных вероятностей, а выход блока расчета состояния вероятности обнаруженного объекта соединен со вторым входом блока расчета переходных вероятностей, выход блока расчета переходных вероятностей соединен с входом блока интенсивности воздействия на объект, выход блока интенсивности воздействия на объект соединен со вторым входом блока расчета состояния объекта, восьмой выход регистра сдвига соединен с первым входом блока расчета состояния объекта, выход блока расчета состояния объекта соединен с четвертым входом регистра памяти.
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КАТАЛОГА РАЗВЕДКИ РАЗНОТИПНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2544761C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ КАТАЛОГА РАЗВЕДКИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2353970C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2298825C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2008 |
|
RU2385493C1 |
| US 20170132334 A1, 11.05.2017. | |||

