Назначение
Предлагаемое изобретение относится к магнитной системе космического аппарата (КА), формируемой при взаимодействии с геомагнитным полем Земли механический момент для управления ориентацией (движением вокруг центра масс) и первоначального успокоения космического аппарата после отделения от ракеты-носителя или разгонного блока, а также разгрузки кинетического момента инерционных исполнительных органов в виде двигателей-маховиков (ДМ) в системе ориентации.
Уровень техники
Наиболее широко известные системы, создающие внешний механический момент на КА, - системы в которых используются исполнительные органы с газореактивными соплами или микрореактивными двигателями (см. например, патенты, РФ, №2271317, 2648906). Эти исполнительные органы, отбрасывая холодный или горячий газ через сопло в космическое пространство, создают силу, воздействующую на аппарат.
Однако они имеют существенный недостаток - расход рабочего тела, вследствие чего полезное время функционирования КА ограничено (в современных КА дистанционного зондирования Земли предъявляются повышенные требования по надежности работы с учетом ресурса КА, как правило, не менее 7-10 лет) и, кроме того, для КА данные системы практически неприемлемы из-за наличия рабочего тела, увеличивающего массу и габариты КА.
Поэтому для КА наиболее приемлемыми устройствами управления являются, например, двигатели-маховики (ДМ), часто используемые в системах ориентации и стабилизации КА (см. например, патент, РФ, №1839928), которые отличают высокая точность стабилизации, малые размеры, простота управления, а также отсутствие расхода не возобновляемого рабочего тела. Двигатели-маховики создают внутренний управляющий момент (создают механический момент вокруг оси, параллельной оси вращения ротора двигателя-маховика), но они не могут парировать внешние возмущения.
Они являются инерционными носителями кинетического момента, поэтому одним из недостатков двигателей данного типа является необходимость сброса кинетического момента маховиков при достижении ими предельных скоростей вращений. В том случае, если на корпус космического аппарата воздействует какой-нибудь внешний момент (силы аэродинамического сопротивления, световое давление, гравитационное поле или другие внешние силы), то корпус с течением определенного времени приобретает некоторую угловую скорость вокруг какой-либо оси. Эту «паразитную» скорость можно ликвидировать только внешним моментом (см. А.Г. Иосифьян, Электромеханика в космосе. «Космонавтика, астрономия» №3. 1977 г). Физически это означает, что «паразитное» вращение приостанавливается, если перевести полученный корпусом кинетический момент «внутрь», запуская, например, ротор двигателя-маховика в направлении, по которому действовала внешняя сила и внешний вращающий момент, при этом, обеспечивается сброс кинетического момента КА.
Известны системы, создающие внешний механический момент на КА, в которых не требуется наличие какого-либо расходуемого рабочего тела - это магнитные системы, работающие в ближнем космосе в условиях действия геомагнитного поля Земли (высота приблизительно до 9000 км).
В качестве исполнительных органов в данных магнитных системах используются электромагниты, формирующие магнитные моменты, которые взаимодействуя с геомагнитным полем Земли, создают внешние управляющие механические моменты на КА (см. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 9), способные обеспечить процесс успокоения при отделении КА от ракеты-носителя или разгонного блока, а также, при сочетанном использовании магнитной системы с двигателями-маховиками сброс кинетического момента и управление ориентацией (движение вокруг центра масс) КА.
Таким образом, при создании современных КА весьма актуальна разработка надежной высокоэффективной магнитной системы, не требующей рабочего тела, с оптимальными энергетическими затратами, позволяющей обеспечить сброс кинетических моментов инерционных исполнительных органов, ориентацию и стабилизацию космических аппаратов с заданной точностью, а также процесс успокоения при отделении КА от ракеты-носителя или разгонного блока.
В общем случае управляющий момент М определяется основным уравнением управления (см. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение». 1975 г.. стр. 21):

где Q - вектор создаваемого магнитного момента магнитной системой;
В - вектор магнитной индукции магнитного поля Земли.
Следует отметить, что в магнитной системе не могут быть создан управляющий момент относительно направления, совпадающего с вектором магнитной индукции магнитного поля Земли, и независимые моменты одновременно относительно всех осей управления.
Известен "Способ магнитной разгрузки двигателей-маховиков космического аппарата" (патент. РФ, №2568827) в котором при превышении критического уровня накопленного кинетического момента двигателями-маховиками КА разворачивают с помощью ДМ вокруг двух взаимно перпендикулярных осей КА таким образом, чтобы ось ДМ с меньшим накопленным кинетическим моментом совпадала с вектором магнитной индукции внешнего магнитного (геомагнитного) поля. Арретируют магнитную систему и момент, возникающий при взаимодействии магнитной системы и внешнего магнитного поля, используют для сброса кинетического момента ДМ, лежащих в плоскости, перпендикулярной вектору магнитной индукции внешнего магнитного поля. После сброса кинетического момента магнитную систему разарретируют и космический аппарат при необходимости возвращают в опорную систему координат, или происходит новый разворот с целью сброса кинетического момента ДМ, ось которого совпадала с вектором магнитной индукции внешнего магнитного (геомагнитного) поля.
Недостатком данного изобретения является то, что требуются механические стопоры (арретиры) для арретирования и разарретирования магнитной системы относительно корпуса КА, что приводит к существенному конструктивному усложнению, особенно для больших КА, и в целом к снижению надежности работы магнитной системы.
Кроме того, разворот КА обеспечивается с помощью ДМ, требующих разгрузку, которые близки к насыщению. Это неблагоприятный режим, снижающий надежность работы магнитной системы, т.к. ДМ может воздействовать на КА только при изменении скорости вращения ротора ДМ. Когда скорость вращения достигает предела, ДМ теряет возможность воздействовать на КА.
Известен "Способ сброса кинетического момента инерционных исполнительных органов космического аппарата и устройство для реализации способа" (патент, РФ, №2625687), устройство которого включает в себя датчики компонент кинетического момента по трем координатным осям X, Y, Z, датчики компонент геомагнитной индукции по трем координатным осям X, Y, Z, блок управления (БУ), ко входам которого подключены упомянутые датчики, магнитный исполнительный орган, на выходах которого формируются сигналы управляющих магнитных моментов, кроме того, имеются три ЦАП. входы которых подключены к трем выходам БУ, три компаратора, первые входы которых подключены к выходам ЦАП. а на вторые входы подается пороговый сигнал - σо, три элемента И, первые входы которых соединены с выходами компараторов, а вторые входы соединены с четвертым выходом БУ, три электронных ключа входы которых подключены к выходам ЦАП, управляющие входы электронных ключей соединены с выходами элементов И, а выходы соединены с входами магнитных исполнительных органов, содержащие последовательно соединенные реверсивные коммутаторы и электромагниты.
Недостатком данного изобретения является невысокая надежность работы устройства, в виду того, что срок активного существования современных КА не менее 7 лет и при выходе из строя, например, электромагнитов и ряда других ключевых электронных устройств не предусмотрены возможности по сохранению работоспособности магнитной системы.
Кроме того, техническое обеспечении в каждой катушке X, Y, Z магнитного исполнительного органа силы тока в соответствии с величинами кинетического момента Кх, Ку, Kz, (σх, σу, σz) осуществляется электронными микросхемами малой интеграции, которые, виду невысоких функциональных возможностей в условиях ограничения по массе и габаритам, имеют низкую точность формирования требуемой силы тока, соответствующей величине кинетического момента.
Наиболее близким к предлагаемому изобретению является "Устройство формирования механического момента электромагнитом в магнитной системе ориентации космического аппарата" (патент, РФ, №2672316), взятое авторами за прототип.
Данное устройство формирования механического момента электромагнитом в магнитной системе ориентации КА, включает в себя электромагнит с катушкой индуктивности и электронное устройство, содержащее устройство управления и мостовую схему на полупроводниковых силовых элементах, соединенную с выходами устройства управления, кроме того, между электромагнитом и электронным устройством дополнительно введены релейный узел с разъемом для соединения с электромагнитом, причем обмотка электромагнита состоит из двух катушек индуктивности - основной и резервной, а электронное устройство содержит два идентичных канала - основной и резервный, каждый из которых помимо мостовой схемы и устройства управления содержит микро-ЭВМ и два оптронных учла, параллельно встречно включенные светодиоды которых одним выводом соединены с одной точкой диагонали мостовой схемы, другим - с релейным узлом, который также соединен со второй точкой диагонали мостовой схемы, при этом группа входов устройства управления соединена с группой выходов микро-ЭВМ. отдельный выход которой соединен с входом релейного узла, а отдельные входы - с выходами фотоприемного устройства оптронных узлов.
Недостатком прототипа является невысокая эффективность управления магнитной системы, особенно для больших КА (масса более 1000 кг), а также не предусмотрены условия по повышению надежности ключевых устройств аппарата с целью достижения требуемого срока активного существования для современных КА. В соответствии с ГОСТ Р 56526-2015 надежность - это совокупность свойств, характеризующих способность КА обеспечивать в процессе функционирования получение заданного в техническом задании выходного эффекта при заданных условиях и режимах эксплуатации. Основными свойствами надежности являются безотказность, долговечность, сохраняемость.
Под высокой эффективностью управления магнитной системы следует понимать формирование высокого управляющего магнитного момента, при этом, должны обеспечиваться условия по оптимально низкому энергопотреблению исполнительными выходными органами - электромагнитами, которые в основном определяют максимальную потребляемую мощность электроэнергии магнитной системы от бортового источника питания КА.
Необходимость в формировании высокого управляющего магнитного момента связана с тем, что максимальное значение механического момента, воздействующего на КА, формируется при условии перпендикулярности вектора магнитного момента электромагнита и вектора индукции геомагнитного поля Земли и наоборот, минимальное значение механического момента, достигающее полного отсутствия - при их параллельности. Это связано с тем, что главное магнитное поле Земли определяется источниками, находящимися в жидком ядре и на границе ядро-мантия. Мировая модель нормального поля, основанная на представлении нормального поля в виде ряда по сферическим функциям, коэффициенты которого определяются каждые 5 лет на основе мировой сети магнитных обсерваторий и описывается выражениями:
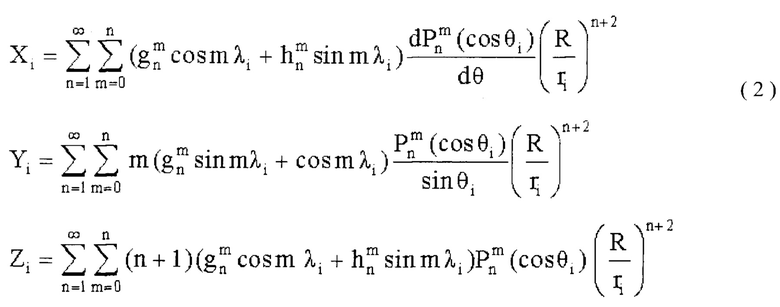
где X, Y, Z - соответственно северная, восточная и вертикальная составляющие;
R - средний радиус Земли, r - расстояние от точки до центра Земли;
λ - долгота, θ=π/2-ϕ - дополнение до широты;
 - присоединенная функция Лежандра первого рода;
- присоединенная функция Лежандра первого рода;
 - сферические гармонические коэффициенты.
- сферические гармонические коэффициенты.
Геомагнитное поля Земли характеризуется наличием как глобальных, так и региональных аномалий и непрерывно изменяется во времени, т.е. характеризуется так называемым вековым ходом (см. патент РФ, №2447405). В связи с эти, угол между вектором магнитного момента электромагнита и вектором индукции геомагнитного поля Земли постоянно изменяется при движении КА по орбите, поэтому для повышения эффективности магнитной системы необходимо сокращать время включения исполнительных органов, прежде всего, увеличением управляющего момента на КА.
Снижение энергопотребления электромагнитами обусловлено важнейшим требованием для всех потребителей электроэнергии от бортового источника электропитания КА, имеющего в своем составе солнечную батарею, преобразующей постоянно меняющуюся световую энергию Солнца, и аккумуляторную батарею, являющуюся одним из наиболее критичным звеном у системы электропитания КА, а также аппаратуру регулирования и контроля (см., например, патенты №2689401, №2724111).
Целью предлагаемого изобретения является повышение эффективности и надежности работы магнитной системы.
Раскрытие изобретения
Сущность предлагаемого устройства сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы заключается в техническом обеспечении повышения надежности работы магнитной системы и эффективности управления КА (увеличения управляющего момента), а также снижения энергопотребления исполнительными выходными органами - электромагнитами, которые в магнитной системе в основном определяют максимальную потребляемую мощность электроэнергии от бортового источника питания КА.
Повышение надежности работы магнитной системы и эффективности управления КА обеспечивается тем. что электромагниты по осям космического аппарата ЭМX, ЭМY, ЭMZ в предлагаемом изобретении выполняют из n электромагнитов (n≥1), каждый из которых содержит две обмотки L1 и L2, работающие в горячем режиме. Данные n электромагнитов, формирующие магнитные моменты одного направления, могут соединяться параллельно или последовательно и располагаются вдоль связанных осей X, Y, Z космического аппарата.
Снижение энергопотребления электромагнитами осуществляется путем формирования микроконтроллерами с высокой точностью напряжений (соответственно, силы тока) в электромагнитах ЭМX, ЭМY, ЭMZ в соответствии с величинами кинетического момента Кх, Ку, Kz по связанным осям КА.
Кроме того, высокая надежность составляющих устройства сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы обеспечивается за счет обоснованного комплексного и совокупного использования резервирования, избыточности, мажоритирования.
Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы включает в себя электромагнит с катушкой индуктивности, состоящей из двух катушек индуктивности - основной и резервной, микро-ЭВМ, реверсивный коммутатор, выполненный по мостовой схеме на полупроводниковых силовых элементах, релейный узел, двух датчиков тока и устройство управления реверсивными коммутаторами.
Введение в устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы блока электромагнитов, содержащих устанавливаемые вдоль связанных осей X, Y, Z космического аппарата, соответственно, электромагниты ЭМх, ЭМу, ЭMz, каждый из которых состоит из n (n≥1) электромагнитов, блока реверсивных коммутаторов, состоящих из трех идентичных реверсивных коммутаторов по связанным осям X, Y, Z космического аппарата, блока датчиков тока, состоящего из трех идентичных оптронных датчиков тока по связанным осям X, Y, Z космического аппарата, блока преобразователей постоянного напряжения, состоящего из трех идентичных преобразователей постоянного напряжения по связанным осям X, Y, Z космического аппарата, блока датчиков угловых скоростей, блока двигателей-маховиков и магнитометра позволяет повысить эффективность и надежность работы магнитной системы.
Введением в устройство блока электромагнитов, содержащих устанавливаемые вдоль связанных осей X, Y, Z космического аппарата, соответственно, электромагниты ЭМх, ЭМу, ЭMz, каждый из которых состоит из n (n≥1) электромагнитов обеспечивается возможность увеличения формируемых электромагнитами магнитных моментов, что позволяет использовать магнитную систему, в том числе, для больших КА с высокой эффективностью управления КА (управление высоким механическим моментом).
Введением в устройство блока реверсивных коммутаторов и блока датчиков тока обеспечивается подача требуемых напряжений для электромагнитов по связанным осям X, Y, Z космического аппарата, а также направление в них тока, определяющего направление воздействия механического управляющего момента на КА.
Введением в устройство блока преобразователей постоянного напряжения обеспечивается снижение энергопотребления электромагнитами за счет формирования напряжений (соответственно, силы тока) в электромагнитах по связанным осям космического аппарата ЭМX, ЭМY, ЭMZ в соответствии с величинами кинетического момента Кх, Ку, Kz (σх, σу, σz) с высокой точностью. Высокая точность обеспечивается электронными компонентами, имеющими большую степень интеграции и обладающими высокими функциональными возможностям - микроконтроллерами, которые "работают" в преобразователях постоянных напряжений по связанным осям X, Y, Z космического аппарата. Микроконтроллеры формируют ШИМ сигналы, которые управляют инверторами высокой частоты с выпрямителями на выходе.
Графические иллюстрации
Изобретение проиллюстрировано графическими фигурами фиг. 1 и фиг. 2.
На приведенной графической фигуре (фиг. 1) приведена структурная схема для реализации заявляемого устройства сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы, содержащей составляющие, обозначенные позициями:
• БЭМ - блок электромагнитов (по связанным осям X, Y, Z космического аппарата, соответственно электромагниты ЭМх, ЭМу, ЭMz) - 1;
• основные катушки индуктивности электромагнита - L1-1, L1-2…, L1-n;
• резервные катушки индуктивности электромагнита - L2-1, L2-2…, L2-n;
• ГПЗ (геомагнитное поле Земли) - 2;
• сформированные по связанным осям X, Y, Z космического аппарата механические моменты (Мх, My, Мz) - 3;
• корпус КА - 4;
• блок ДМ (блок датчиков-маховиков) - 5;
• БДУС (блок датчиков угловых скоростей) - 6;
• магнитометр - 7;
• микро-ЭВМ - 8;
• БРК - блок реверсивных коммутаторов (по связанным осям X, Y, Z космического аппарата, соответственно 9х, 9у, 9z) - 9;
• блок датчиков тока (по осям X, Y, Z космического аппарата, соответственно 10х, 10у, 10z)-10;
• оптронные узлы датчиков тока по связанной оси X космического аппарата - 10х-1, 10х-2;
• релейный узел -11;
• УУ РК (устройство управления реверсивными коммутаторами) - 12;
• БК (бортовой компьютер) - 13;
• НКУ (наземный комплекс управления) - 14;
• ППН - блок преобразователей постоянного напряжения (по связанным осям X, Y, Z космического аппарата преобразователи постоянного напряжения, соответственно, ППНх - 15х, ППНу - 15у, ППНz - 15z) - 15;
• МК (микроконтроллер) - 16;
• И (инвертор)- 17;
• выпрямитель - 18;
• ИБП КА (источник бортового питания КА) - 19.
Между бортовым компьютером БК 13 и микро-ЭВМ 8 осуществляется обмен командно-программной информацией, навигационными данными.
У всех современных КА обмен осуществляется по мультиплексному каналу обмена (требование ГОСТ Р 52070-2003).
Телеметрические информационные сигналы с бортового компьютера БК 13 передаются в центр наземного управления НКУ 14 по телеметрии (ТМ), а из центра наземного управления НКУ 14 в бортовой компьютер БК 13 - команды управления (КУ).
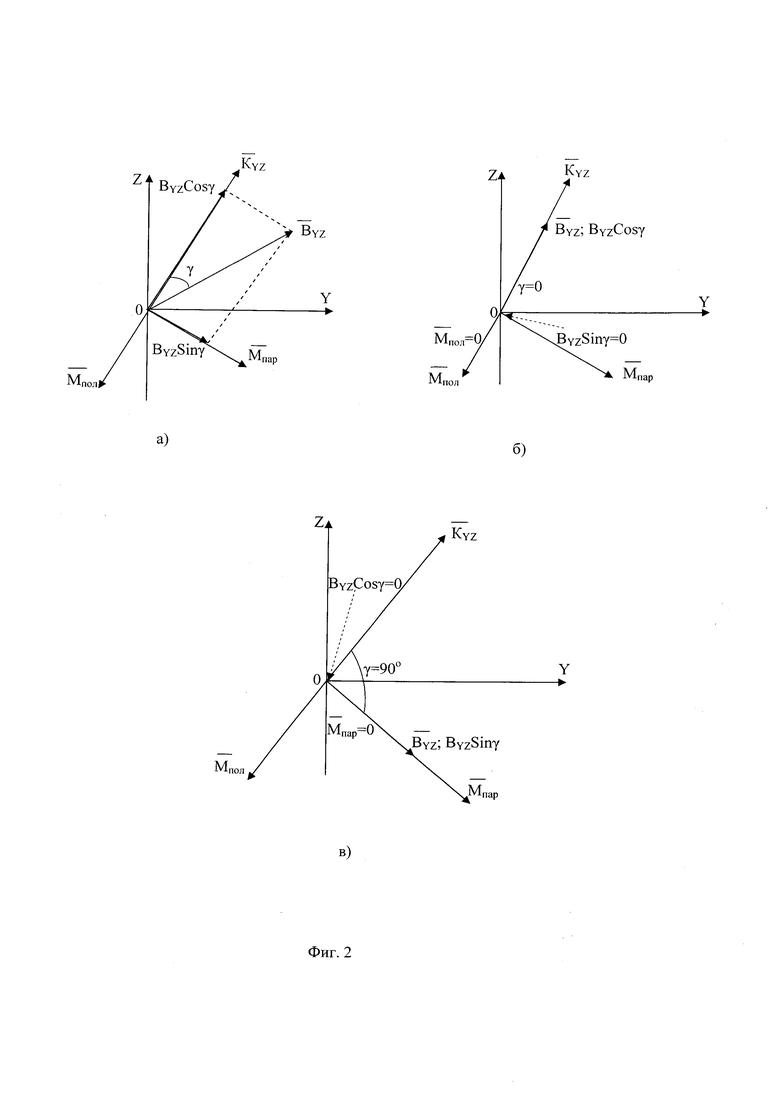
На фиг. 2 представлены графики формирования полезной и паразитной составляющей механических моментов в магнитной системе.
Осуществление изобретения
Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы, включает в себя электромагнит с катушкой индуктивности, состоящей из двух катушек индуктивности - основной L1-1 и резервной L2-1, микро-ЭВМ 8, реверсивный коммутатор 9х, выполненный по мостовой схеме на полупроводниковых силовых элементах, и устройство управления реверсивными коммутаторами УУ РК 12, выходом соединенную с управляющими входами реверсивного коммутатора 9х, одна точка диагонали которого через релейный узел 11 соединена с одним концом основной катушки индуктивности электромагнита L1-1, второй конец которой также через релейный узел 11 соединен с одним выводом, входящими в блок датчиков тока 10, двух параллельно встречно включенных, светодиодов двух оптронных узлов датчиков тока 10х-1 и 10х-2, второй вывод которых соединен с второй точкой диагонали реверсивного коммутатора 9х, при этом отдельный выход микро-ЭВМ 8 соединен с входом устройства управления реверсивными каналами УУ РК 12, а отдельные входы - с выходами фотоприемного устройства (Ф) оптронных узлов датчиков тока 10х-1 и 10х-2.
В устройство дополнительно введены блок электромагнитов БЭМ 1, блок реверсивных коммутаторов БРК 9, блок датчиков тока 10, блок преобразователей постоянного напряжения 15, блок датчиков угловых скоростей (БДУС) 6, блок двигателей-маховиков 5 и магнитометр 7, при этом, блок электромагнитов БЭМ 1 содержит устанавливаемые по связанным осям X, Y, Z космического аппарата, соответственно, электромагниты ЭМх, ЭМу, ЭMz, каждый из которых состоит из n (n≥1) электромагнитов, соединенных последовательно или параллельно через релейный узел 11 с блоком реверсивных коммутаторов БРК 9 и содержащие основные L1-1, L1-2…, L1-n и резервные L2-1, L2-2…, L2-n катушки индуктивности, работающие в горячем режиме;
блок реверсивных коммутаторов БРК 9, состоящий из трех идентичных реверсивных коммутаторов по связанным осям X, Y, Z космического аппарата 9х, 9у, 9z, каждый из которых соединен с выходами устройства управления реверсивными коммутаторами УУ РК 12 и выходами блока преобразователей постоянного напряжения 15, при этом, каждый реверсивный коммутатор 9х, 9у, 9z соединен с идентичными устройствами оптронных узлов 10х, 10у, 10z блока датчиков тока 10, соответственно, по связанным осям X, Y, Z космического аппарата, которые соединены с релейным узлом 11 и группой отдельных входов микро-ЭВМ 8;
блок датчиков угловых скоростей БДУС 6, блок ДМ 5 и магнитометр 7 соединены с группой отдельных входов микро-ЭВМ 8. которая группой информационных выходов соединена с входом устройства управления реверсивными коммутаторами УУ РК 12, входами блока преобразователя постоянного напряжения 15 и с микроконтроллерами 16 в каждом преобразователе постоянного напряжения ППНх 15х, ППНу 15у, ППHz 15z, при этом. ШИМ-выходы микроконтроллеров 16 соединены с управляющими входами инверторов 17, выходы которых через выпрямители 18 являются выходами блока преобразователя постоянного напряжения 15, а по шинам питания соединены с источником бортового питания ИБП КА 19;
формируемые блоком электромагнитов БЭМ 1 компоненты магнитных моментов Qx, Qy, Qz взаимодействуя с компонентами магнитных индукций Вх, By, Bz геомагнитного поля Земли ГПЗ (2) формируют управляющие моменты Мх, My, Mz (3), воздействующие на корпус КА 4, при этом, компоненты магнитной индукции Вх, By, Bz геомагнитного поля Земли ГПЗ (2) измеряются магнитометром 7.
Описание устройства сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы
Исполнительным органом магнитной системы является электромагнит, который состоит из катушки индуктивности с помещенным внутрь сердечником. При пропускании постоянного тока через витки катушки индуктивности происходит намагничивание сердечника и электромагнит приобретает свойства постоянного магнита, формирующего магнитное поле, которое исчезает при прекращении протекания тока, при этом, сердечник размагничивается.
Электромагниты ЭМX, ЭМY, 3MZ блока электромагнитов БЭМ 1 располагают на корпусе КА для механического управления им вокруг центра масс, как правило, вдоль ортогональных связанных осей X, Y, Z космического аппарата.
В предлагаемом изобретении в качестве электромагнитов используют надежные электромагниты с сердечником стержневого типа из магнитно-мягкого материала с обмотками из медного провода. Например: на стержневом сердечнике круглого сечения из магнитно-мягкого материала намотаны две катушки индуктивности медным проводом (для повышения надежности используют, например, горячий режим резервирования в работе катушек индуктивности L1-1 и L2-1). Катушки индуктивности конструктивно могут быть закрыты тепловой изоляцией и защищены наружным экраном от радиации и механических повреждений.
Использование магнитно-мягкого материала в сердечнике (путем отжига электротехнической стали, например. 10860) позволяет существенно уменьшить петлю гистерезиса, увеличить создаваемый магнитный момент электромагнитом, при этом, обеспечивается низкая коэрцитивная сила в петле гистерезиса, в связи с чем. сердечник практически не остается намагниченным при удалении поля, что особенно важно при многократном переключении направления магнитного момента (см., например. А.Г. Сливинская. Электромагниты и постоянные магниты. М. «Энергия», 1972 г., стр. 22-24).
Для повышения надежности работы магнитной системы и эффективности управления КА (увеличения управляющего момента), электромагниты ЭМX, ЭМY, ЭMZ в предлагаемом изобретении выполняют из n электромагнитов (n≥1), каждый из которых содержит две обмотки L1-i и L2-i. Данные n электромагнитов формируют магнитные моменты в одном направлении и могут соединяться параллельно или последовательно.
Релейный узел 11, используемый для переключений обмоток катушек индуктивности в блоке электромагнитов БЭМ 1 обладает высокой надежностью, в виду того, что он находится в ждущем режиме, т.е. отсутствует основной показатель ненадежности - большое количество переключений контактов в релейном узле 11.
Известно (см., А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 169-170), что при протекании тока I в катушке индуктивности с количеством витков w и средней площадью витка Sсp, катушкой создается магнитный момент Q:

Кроме того, в данном источнике информации приведены обоснованные выводы, из которых следует, что при прочих равных условиях магнитный момент катушки индуктивности будет тем больше, чем больше ее габариты.
Процесс расчета количества витков w, диаметра провода и заданного тока является итерационным, т.к. при каждом изменении одного параметра необходимо все пересчитывать, добиваясь максимума ампер-витков, поэтому путь увеличения магнитного момента Q (силового потока) путем увеличения ампервитков не является рациональным. При конструировании электромагнитов увеличение магнитного момента (силового потока) наиболее оптимальным является использование условий уменьшения магнитного сопротивления. Для этого необходимо выбирать магнитопровод с наименьшей длиной пути силовых линий и с наибольшим поперечным сечением, а в качестве материала - железоматериал с большой магнитной проницаемостью.
При этом, следует учитывать ограничение максимальных габаритных размеров электромагнитов:
• габаритными размерами и обликом корпуса КА;
• оптимальным соотношением диаметра каркаса и длины сердечника:
 оптимальное соотношение - когда длина сердечника равна длине каркаса катушки;
оптимальное соотношение - когда длина сердечника равна длине каркаса катушки;
 длина сердечника не должна существенно превышать диаметр (предельное практическое значение максимального соотношения - приблизительно 10:1).
длина сердечника не должна существенно превышать диаметр (предельное практическое значение максимального соотношения - приблизительно 10:1).
Таким образом, с учетом широкого диапазона массы, габаритов и облика запускаемых космических аппаратов, возникает необходимость в создании ряда типоразмерных электромагнитов в ЭМх, ЭМу, ЭМz, каждый из которых обладает оптимальными параметрами для работы в магнитной системе.
При протекании токов в катушках электромагнитов ЭМх, ЭМу, ЭМz блока электромагнитов БЭМ 1 по связанным осям X, Y, Z космического аппарата создаются компоненты магнитных моментов Qx, Qy, Qz, которые при взаимодействии с компонентами геомагнитной индукции Вх, By, Bz геомагнитного полем Земли (2), в проекциях на связанные оси космического аппарата X, Y, Z, создают управляющие механические моменты Мх, My, Mz (3), которые описываются (с учетом выражения 1) следующими выражениями:

При отделении КА от ракеты или разгонного блока осуществляется процесс успокоения, затем процесс приведения (совмещение осей связанной системы координат КА с осями орбитальной системы координат) и последующая стабилизация КА.
Практически на всех современных КА используют двигатели-маховики в системе ориентации и стабилизации КА, которые отличают высокая точность стабилизации, малые размеры, простота управления, а также отсутствие расхода не возобновляемого рабочего тела. Двигатели-маховики создают внутренний управляющий момент (создают механический момент вокруг оси, параллельной оси вращения ротора двигателя-маховика) и не могут парировать внешних возмущений, поэтому при использования в КА блока двигателей-маховиков 5 и магнитной системы, формирующей механические моменты Мх, My, Mz, управляющие корпусом КА (4) обеспечивается:
• предварительное успокоение путем гашения начальной угловой скорости КА, приобретенной в результате отделения КА от ракеты-носителя или разгонного блока, с использованием только воздействия управляющих механических моментов Мх, My, Mz (3) магнитной системы. Уравнения движения в режиме предварительного успокоения приведено в книге А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 107-109;
• движение КА вокруг центра масс (ориентация и стабилизация КА) при сочетанном использовании магнитной системы и двигателей-маховиков блока ДМ 5;
• сброс кинетического момента КА в соответствии с законом сохранения момента количества движения при сочетанном использовании магнитной системы и двигателей-маховиков блока ДМ 5.
В качестве двигателя-маховика в блоке ДМ 5 можно использовать, например, ДМ 1-20 (или, например, ДМ1-50), выполненный на основе управляемого моментного бесконтактного двигателя постоянного тока, разработки АО "Корпорация "ВНИИЭМ", г. Москва (см. "Двигатели-маховики для систем ориентации космических аппаратов". На сайте: https://www.vniiem.ru/). Данный двигатель-маховик ДМ1-20 имеет импульсный интерфейс, вход для управления частотой вращения ротора и встроенный датчик частоты вращения ротора, по которому микро-ЭВМ 8 в постоянном режиме фиксирует частоту вращения ротора двигателя-маховика в блоке ДМ 5 и обеспечивает регулировку для достижения требуемых ее значений.
Для управления ориентацией КА в блоке ДМ 5 необходимо как минимум три двигателя-маховика: по каждой из осей ориентации КА (крену - вращение вокруг оси OXs, рысканью - вращение вокруг оси OYs, тангажу - вращение вокруг оси OZs).
Резервировать их в «холодном» режиме нецелесообразно в виду того, что, как показала практика, электромеханическое устройство, которое длительное время не включалось в космосе, имеет все шансы не включиться и в тот момент, когда в нем появится необходимость. Поэтому для повышения надежности целесообразнее использовать избыточную систему, например, при минимальной избыточной системе следует расположить двигатели-маховики на гранях пирамиды, делить управляющий момент между всеми четырьмя двигателями-маховиками и парировать отказ одного из них, перераспределяя момент по трем оставшимся.
Важнейшей характеристикой двигателя-маховика является его максимальный кинетический момент, который он может накопить. Двигатели-маховики блока ДМ 5 «вморожены» в корпус КА. т.е. не совершает никаких движений относительно корпуса, но участвуют в его движении в соответствии с законом сохранения момента количества движения, который описывается выражением:

где Ja, Jм, соответственно моменты инерции КА и маховика:
ωа, Ωм соответственно их текущие угловые скорости;
ωа(0), Ωм(0) начальные значения угловых скоростей
(см. Научно-технический вестник Санкт-Петербургского государственного университета информационных технологий, механики и оптики, 2009, №5(63), стр. 48).
Произведения Ja⋅ωа и Jм⋅Ωм называются моментами количества движения КА и маховика соответственно.
Из выражения (5) видно, что любое изменение угловой скорости вращения маховика ΔΩм=Ωм-Ωм(0), приводит к изменению угловой скорости КА Δωа=ωа-ωа(0), но в противоположном направлении и в соотношении, определяемом моментами инерции.
Рассмотрим процесс формирования электромагнитами компонентов магнитных моментов Qx, Qy, Qz.
В микро-ЭВМ 8 поступают компоненты геомагнитной индукции Вх, By, Bz и компоненты кинетического момента космического аппарата Кх, Ку, Kz.
Компоненты геомагнитной индукции Вх, By, Bz измеряют с помощью магнитометра 7.
В качестве магнитометра 7 можно использовать трехмерный магнитометр, например, магнитометр цифровой трехкомпонентный МЦТ-11 разработки АО «Раменское приборостроительное конструкторское бюро».
Компоненты кинетического момента космического аппарата Кх, Ку, Kz, в соответствии с выражением (5) соответствуют компонентам кинетического момента двигателей-маховиков в блоке ДМ 5 и измеряют с помощью датчиков угловых скоростей БДУС 6, который строится на базе высокочувствительных датчиков угловой скорости, измеряющих непосредственно вектор угловой скорости, и обладающих необходимым ресурсом. С целью повышения надежности и живучести БДУС 6, при минимальных аппаратных затратах, целесообразно использование функциональной избыточности (четыре, шесть и более) на основе использования неортогонального расположения датчиков угловых скоростей. При этом, за счет выбора рациональной конфигурации датчиков угловых скоростей, точность БДУС 6 может быть повышена на 30-40% (см. Паршин А.П., Немшилов Ю.А. Разработка измерительного блока системы ориентации БПЛА с неортогональным расположением чувствительных элементов // Современная техника и технологии. 2016. №3).
В качестве датчиков угловых скоростей в БДУС 6 можно использовать, например, датчики, основанные на микроэлектромеханических системах (МЭМС). выпускаемых Компанией «Лаборатория Микроприборов», г. Зеленоград или например, приборы на основе волоконно-оптических гироскопов разработки ЗАО НПП «Антарес» БИУС-М-1.
По сигналам Вх, By, Bz и Кх, Ку, Kz поступающим в микро ЭВМ 8 на ее информационных выходах формируются сигналы, равные:
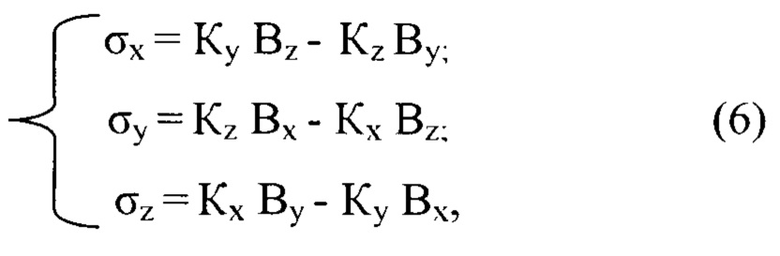
а также сигнал запрета αо, который при соответствии его, например, логическому "0", запрещает включение блока электромагнитов БЭМ 1 и формирование паразитных механических моментов Мх пар, My пар, Mz пар по связанным осям X, Y, Z космического аппарата, и наоборот, при соответствии его логической "1", разрешает включение блока электромагнитов БЭМ 1 и формирование полезных механических моментов Мх пол, My пол, Мz пол по связанным осям X, Y, Z космического аппарата. Это необходимо для того, что в случае, когда паразитный момент больше полезного, устройство может не только не сбрасывать кинетический момент, а напротив, увеличивать его (паразитные возмущения при включении магнитных исполнительных органов возникают в следствие того, что механический момент, создаваемый взаимодействием магнитного поля электромагнитов с геомагнитным полем, в общем случае представляет собой сумму двух составляющих - полезной составляющей, вектор которой параллелен вектору кинетического момента и направлен в противоположную сторону, и паразитную составляющую, вектор которой перпендикулярен вектору кинетического момента).
Это видно на примере формирования полезного и механического магнитных моментов по связанной оси X из графиков, представленных на фиг. 2 (в соответствии с выражениями (6) при формировании механических моментов по связанным осям Y и Z процессы аналогичны):
• на фиг. 2 (а) вектор  находится под произвольно выбранным углом к вектору
находится под произвольно выбранным углом к вектору  в пределах от 0 до 90°;
в пределах от 0 до 90°;
• на фиг. 2 (б) вектор находится на оси вектора 
• на фиг. 2 (в) вектор находится под углом 90° к вектору
Из графиков на фиг. 2 (а) видно, что сомножитель BYZSinγ равен величине составляющей вектора перпендикулярной вектору . Эта составляющая геомагнитной индукции при включении магнитного исполнительного органа, формирующего магнитный момент Lx, создает полезный механический момент  направленный в противоположном направлении к вектору . Величина BYZCosγ равна проекции вектора на направление вектора . При включении магнитного исполнительного органа эта составляющая геомагнитной индукции является причиной возникновения паразитного механического момента
направленный в противоположном направлении к вектору . Величина BYZCosγ равна проекции вектора на направление вектора . При включении магнитного исполнительного органа эта составляющая геомагнитной индукции является причиной возникновения паразитного механического момента  направление которого перпендикулярно составляющей .
направление которого перпендикулярно составляющей .
Из графиков на фиг. 2 (б) видно, что при совпадении направлений векторов и полезный механический момент отсутствует, а паразитный имеет максимальное значение.
Из графиков на фиг. 2 (в) видно, что при перпендикулярном направлении векторов и полезный механический момент имеет максимальное значение, а паразитный отсутствует.
Как видно из графиков на фиг. 2 сигнал запрета ao, соответствующий логической "1", формируется при условии  что соответствует значению угла γ>45° и наоборот сигнал запрета aо, соответствующий логическому "0", формируется при условии
что соответствует значению угла γ>45° и наоборот сигнал запрета aо, соответствующий логическому "0", формируется при условии  что соответствует значению угла γ<45°.
что соответствует значению угла γ<45°.
Для повышения надежности и живучести микро-ЭВМ 8, ее целесообразно выполнять в виде мажоритированной трехканальной структуры (см., например, Н.К. Байда и др. Эволюция отказоустойчивых БЦВК и направления их развития на однокристальных микро-ЭВМ. Системи обробки  випуск 4(14), 2001). Так, например, в качестве микро-ЭВМ 8 возможно применение 4-х канальной ЦВМ201 (разработка АО «НИИ «Субмикрон», г. Зеленоград), при этом, рекомендуемым вариантом является мажоритированная работа 3-х модулей, а четвертый находится в холодном резерве.
випуск 4(14), 2001). Так, например, в качестве микро-ЭВМ 8 возможно применение 4-х канальной ЦВМ201 (разработка АО «НИИ «Субмикрон», г. Зеленоград), при этом, рекомендуемым вариантом является мажоритированная работа 3-х модулей, а четвертый находится в холодном резерве.
Рассмотрим процесс формирования магнитных моментов Qx, Qy, Qz, соответственно, электромагнитами ЭМх, ЭМу, ЭMz в блоке электромагнитов 1.
Как было принято в описании выше, формирование магнитных моментов Qx, Qy, Qz осуществляется при сигнале запрета ао, соответствующим логической "1", который формируется в микро-ЭВМ 8 и поступает на вход блока преобразователей постоянного напряжения 15, а именно, на входы "запрета-разрешения" микроконтроллеров МК 16i преобразователей постоянного напряжения ППНi 15i (где i означает х, у, z), и "разрешает" формирование ШИМ сигналов (широтно-импульсную модулированную последовательность импульсов), в соответствии с сигналами σx, σу, σz, поступающими с группы информационных выходов микро-ЭВМ 8. Сформированные ШИМ сигналы в преобразователях постоянного напряжения ППНi 15i формируют переменные импульсные напряжения на выходах инверторов И 17i с постоянной амплитудой и изменяемой длительностью импульсов, которые преобразуются в постоянные напряжения на выходах выпрямителей 18i. Сформированные постоянные напряжения с выходов блока преобразователей постоянного напряжения 15 поступают на реверсивные коммутаторы 9i в виде напряжений источников питания (+Uпит, -Uпит)i.
Преобразователи постоянного напряжения ППНi 15i питаются от бортового источника питания космического аппарата ИБП КА 19. Например, у КА «Канопус-В» номинальное бортовое питание постоянного напряжения составляет 27 В.
Преобразователи постоянного напряжения ППНi 15i позволяют формировать выходные напряжения, соответствующие сигналам σх, σу, σz, с высокой точностью путем изменения коэффициентов заполнения Di в импульсной последовательности с ШИМ в соответствии с изменениями сигналов σх, σу, σz.
Коэффициент заполнения D описывается следующим выражением:

где
τимп - длительность импульсов в импульсной последовательности с ШИМ;
Т - период следования импульсов в импульсной последовательности с ШИМ.
Инверторы И 17i в преобразователях постоянного напряжения ППНi 15i могут быть выполнены в виде мостовых преобразователей с ШИМ управлением (см., например, Мостовой преобразователь с ШИМ. На сайте: https://power-electronics.info/full-bridge.html). Мостовые схемы инверторов И 17i, выполненные на основе однофазного инвертора, являются звеном высокой частоты (типовые высокие частоты выше 20 кГц. фактически в пределах от 40 до 100 кГц).
Данные импульсные преобразователи обладает высоким коэффициентом полезного действия q, который достигает более 90% (см., например, "Как работают импульсные преобразователи напряжения". На сайте: https://www.qrz.ru/schemes/contribute/power/kak-rabotajt-impul-snye-preobrazovateli-naprazenia-27-shem.html).
Выпрямители 18i могут быть выполнены в виде диодного моста с фильтром на выходе (см., например. "Диодный мост". На сайте:
https://www.ruselectronic.com/diodnyj-most/).
В качестве микроконтроллеров 16i могут использоваться, например, микроконтроллеры ST10F276Z5T3.
Рассмотрим формирования токов в электромагнитах в одном канале, например, канале по связанной оси X космического аппарата, т.к. работа каналов по связанным осям Y, Z аналогична, в виду того, что каналы X, Y, Z блока электромагнитов 1, релейного узла 11, БРК 9 и датчиков тока 10 выполнены по идентичной схеме.
При соответствии сигнала ао логической "1" устройство управления реверсивными коммутаторами УУ РК 12, открывает одну из диагоналей транзисторного моста мостовой схемы 9x, определяющую направление тока в блоке электромагнитов БЭМ 1.
При заданном направлении тока в катушках индуктивности L1-j, L2-j (где j означает 1, 2,…n) электромагнита ЭМх (например, обеспечивается открытыми транзисторами V1 и V4 мостовой схемы 9х) ток протекает по цепи: плюсовая шина питания (+Uпит) - транзистор V1 - релейный узел 11 - катушки индуктивности L1-j, L1-j - релейный узел 11 - светодиод оптронного узла датчика тока 10х-2 - транзистор V4 - минусовая шина питания (-Uпит). При этом, на выходе фотоприемника (Ф) оптронного узла датчика тока 10х-2 формируется электрический сигнал, который, поступая в микро-ЭВМ 8 в качестве сигнала обратной связи, "подтверждает" заданное (принимаем за прямое) направление тока катушек индуктивности L1-j, L2-j электромагнита ЭМх и, соответственно, направление магнитного момента, создаваемого электромагнитом ЭМх, который при взаимодействии с геомагнитным полем Земли создает вектор управляющего механического момента на КА. В случае, если сигналом обратной связи направление не "подтверждается", то микро-ЭВМ устраняет данную ошибку по входу устройства управления реверсивными коммутаторами УУ РК 12.
В качестве транзисторов в мостовых схемах целесообразно использовать транзисторные модули в виде двух транзисторов, включаемых в диагональ моста. В блоке реверсивных коммутаторов БРК 9, а также в инверторах И 17i можно использовать модули на современных полевых транзисторах с изолированным затвором (MOSFET), обладающих наилучшими динамическими характеристиками в сравнении с другими тапами транзисторов, например, биполярными транзисторами с изолированным затвором IGBT (см., патент, РФ, №2426215).
При смене направления тока в катушках индуктивности L1-j, L2-j, по сигналу микро-ЭВМ 8 устройство управления реверсивными коммутаторами УУ РК 12 открывает уже другую диагональ транзисторного моста мостовой схемы 9х (открывается транзистор V3 и V2) и ток протекает в противоположном направлении по цепи: плюсовая шина питания -транзистор V3 - светодиод оптронного узла датчика тока 10х-1 - релейный узел 11 - катушки индуктивности L1-j, L2-j - релейный узел 11 - транзистор V2 - минусовая шина питания. При этом уже на выходе фотоприемника (Ф) оптронного узла датчика тока 10х-1 формируется электрический сигнал, который, поступая в микро-ЭВМ 8 в качестве сигнала обратной связи, "подтверждает" заданное (противоположное) направление тока катушек индуктивности L1-j, L2-j электромагнита ЭМх, который создает заданное (противоположное) направление магнитного момента и, соответственно, направление управляющего механического момента.
Отдельные электромагниты, состоящие из катушек (L1, L2)-j, работающих в горячем режиме резервирования (соединены параллельно), соединены последовательно или параллельно в электромагните ЭМх, на который, с блока реверсивных коммутаторов БРК 9 через релейный узел 11 подается постоянное напряжение Uэл, соответствующее с высокой точностью сигналам σx, σy, σz.
С учетом закона Ома и зависимости тока от напряжения в индуктивности (см., например, Матвиенко В.А. Основы теории цепей. Учебное пособие. Екатеринбург, 2016. С. 32, 35)) процессы, происходящие в электромагнитах ЭМх, ЭМу, ЭМz описываются выражением:

где I - ток в катушке, возрастающий по экспоненциальному закону при подаче напряжения на катушку электромагнита;
R - омическое (активное) сопротивление катушки индуктивности, вызывающее безвозвратные потери энергии постоянного тока;
Еэкв - эквивалентная индуктивность, формирующая магнитный момент в данный момент времени индуктивностями электромагнитов ЭМх, ЭМу, ЭМz блока БЭМ 1.
Первое слагаемое (I•R) в выражении (8) характеризует величину теплового выделения электромагнитами ЭМх, ЭМу, ЭMz, а второе - величину создаваемого магнитного момента электромагнитами ЭМх, ЭМу, ЭMz.
Последовательным или параллельным соединением катушек индуктивности обеспечивается увеличение или уменьшение общей (эквивалентной) индуктивности и таким образом можно получить требуемую оптимальную эквивалентную индуктивность. Известно (см., например, "Параллельное, последовательное соединение дросселей".
На сайте: https://gyrator.ru/paraHei-serial-inductance), что эквивалентная индуктивность Lэкв при последовательном соединении n катушек с индуктивностью L в общем виде описывается выражением:

а при параллельном соединении - описывается выражением:

где L1, L2…Ln в выражениях (9, 10) - соответственно индуктивности "работающих" катушек (L1, L2)-j в электромагнитах ЭМх, ЭМу, ЭMz.
При последовательном или параллельном соединении катушек (L1, L2)-j в электромагнитах ЭМх, ЭМу, ЭMz блока БЭМ 1 необходимо соблюдение условия одинакового направления в них токов (соответственно, формируемых направлений магнитных моментов), а также оптимальный выбор из ряда типоразмерных электромагнитов для сопряжение их с бортовым источником питания КА по напряжению и максимальному току. В результате чего, блоком БЭМ 1 сформируются высокие магнитные моменты по связанным осям X, Y, Z космического аппарата, и, соответственно, эффективное суммарное механическое воздействие отдельных n электромагнитов на корпус КА и управление им.
Электрические сигналы, поступающие в микро ЭВМ 8 с выхода фотоприемников (Ф) оптронных узлов датчиков тока 10х-1 и 10х-2 могут быть использованы также в качестве сигналов телеметрии (ТМ), позволяющих обеспечить соответствующее переключение катушек индуктивности L1-j, L2-j электромагнита ЭМх, и/или блоков основного и резервных каналов БРК 9 и датчиков тока 10 (на фиг. 1 не показаны. Исполнение основного и резервного каналов реверсивного коммутатора с датчиками тока приведено в прототипе).
В качестве фотоприемника (Ф) в оптронных узлах датчиков тока 10х-1 и 10х-2 может быть или фотодиод, или фототранзистор, или фоторезистор (например, см. Электронная техника в автоматике, выпуск 10, Москва, 1978 г., стр. 210.).
Защита от сквозных токов короткого замыкания при переключении силовых транзисторов мостовой схемы БРК 9 приведено, например, в описании реверсивного переключателя индуктивной нагрузки в патенте, РФ, 2140128.
Обрывы и межвитковые короткие замыкания в катушках индуктивности L1-j, L2-j отдельных электромагнитов, а также нарушения в соединениях между отдельными электромагнитами сопровождаются изменениями уровней токов в блоке датчиков тока 10, а также изменениями уровней создаваемых магнитных моментов электромагнитами ЭМх, ЭМу, ЭMz блока электромагнитов БЭМ 1 и, следовательно, управляющих механических моментов на КА. В данном случае микро-ЭВМ 8 (при необходимости, с использованием сигналов с НКУ 14) управляет блоком релейных коммутаторов 9 (прежде всего, напряжениями ± Uпит) и релейным узлом 11 для соответствующего выбора соединений между катушками в блоке электромагнитов БЭМ 1 и нормализации режимов работы катушек индуктивности L1-j, L2-j.
Некоторые отдельные межвитковые замыкания в катушках индуктивности L1-j, Lк2-j могут приводить в процессе эксплуатации лишь к незначительному уменьшению индуктивности электромагнитов, что несущественно нарушает эффективность работы магнитной системы. Для повышения надежности работы магнитной системы межвитковые короткие замыкания в катушках индуктивности L1-j, L2-j электромагнитов ЭМх, ЭМу, ЭМх блока электромагнитов БЭМ 1 целесообразно выявлять на специальных стендах до установки их на КА путем пропускания через них переменного тока определенной частоты.
Следует отметить, что для больших КА в которых используются двухстепенные двигатели маховики (гиродины), обладающие большим управляющим моментом, целесообразно использовать сочетанное использование магнитной системы с блоком реактивных двигателей ориентации с несущественным запасом рабочего тела (см., например, патент, РФ №2767648).
В результате данного сочетанного использования существенно сокращается время процесса успокоения и стабилизации КА, эффективно парируются "паразитные" угловые скорости КА при раскрутке роторов гиродинов, а также обеспечиваются условия по оптимизации выбора аккумуляторных и солнечных батарей, позволяющие повысить удельные энергетические характеристики бортового источника питания космического аппарата ИБП КА 19.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство формирования механического момента электромагнитом в магнитной системе ориентации космического аппарата | 2016 |
|
RU2672316C2 |
| Способ сброса кинетического момента инерционных исполнительных органов космического аппарата и устройство для реализации способа | 2015 |
|
RU2625687C2 |
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| Способ трехосной стабилизации экранированного космического аппарата с центрально-симметричным распределением заряда электростатической защиты и устройство для его реализации | 2024 |
|
RU2841573C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ИНЕРЦИОННЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070148C1 |
| Устройство управления движением космического аппарата для очистки космоса от мусора | 2016 |
|
RU2676592C2 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |

Изобретение относится к устройствам управления ориентацией космического аппарата путем его взаимодействия с геомагнитным полем, а именно для разгрузки кинетического момента инерционных исполнительных органов. Устройство включает в себя блок электромагнитов с катушками индуктивности, микро-ЭВМ, блок реверсивных коммутаторов и устройство управления реверсивными коммутаторами, блок датчиков тока, блок преобразователей постоянного напряжения, блок датчиков угловых скоростей, блок двигателей-маховиков и магнитометр. В магнитной системе электромагнитами обеспечивается формирование высоких значений магнитных моментов по связанным осям X, Y, Z космического аппарата. Достигается повышение эффективности и надежности работы магнитной системы. 4 ил.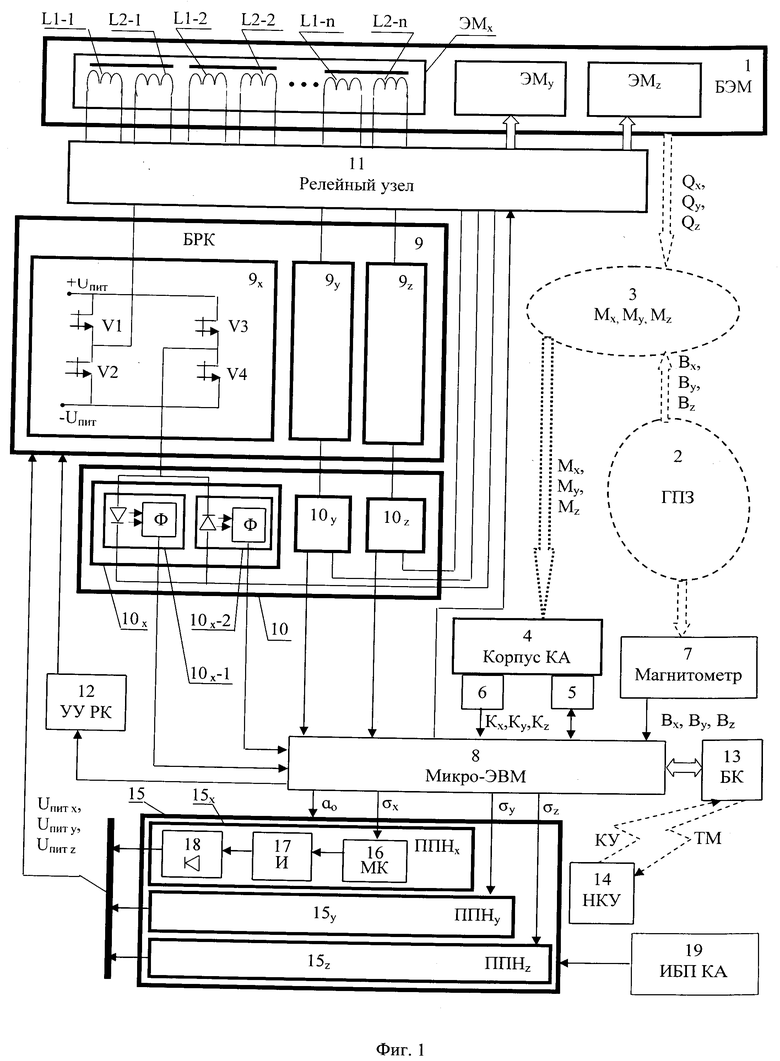
Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы, включающее в себя электромагнит с катушкой индуктивности, состоящей из двух катушек индуктивности - основной и резервной, микро-ЭВМ, реверсивный коммутатор, выполненный по мостовой схеме на полупроводниковых силовых элементах, и устройство управления реверсивными коммутаторами, выходом соединенное с управляющими входами реверсивного коммутатора, одна точка диагонали которого через релейный узел соединена с одним концом основной катушки индуктивности электромагнита, второй конец которой также через релейный узел соединен с одним выводом двух параллельно встречно включенных светодиодов двух оптронных узлов датчиков тока, второй вывод которых соединен с второй точкой диагонали реверсивного коммутатора, при этом отдельный выход микро-ЭВМ соединен с входом устройства управления реверсивными каналами, а отдельные входы - с выходами фотоприемного устройства оптронных узлов датчиков тока, отличающееся тем, что дополнительно введены блок электромагнитов, блок реверсивных коммутаторов, блок датчиков тока, блок преобразователей постоянного напряжения, блок датчиков угловых скоростей, блок двигателей-маховиков и магнитометр, при этом блок электромагнитов содержит устанавливаемые по связанным осям X, Y, Z космического аппарата, соответственно, электромагниты ЭМх, ЭМу, ЭМz, каждый из которых состоит из n (n≥1) электромагнитов, соединенных последовательно или параллельно через релейный узел с блоком реверсивных коммутаторов, и содержащие основную и резервную катушки индуктивности, работающие в горячем режиме; блок реверсивных коммутаторов, состоящий из трех идентичных реверсивных коммутаторов по связанным осям X, Y, Z космического аппарата, каждый из которых соединен с выходами устройства управления реверсивными коммутаторами и выходами блока преобразователей постоянного напряжения, при этом каждый реверсивный коммутатор соединен с идентичными устройствами оптронных узлов блока датчиков тока, соответственно, по связанным осям X, Y, Z космического аппарата, которые соединены с релейным узлом и группой отдельных входов микро-ЭВМ; блок датчиков угловых скоростей, блок двигателей-маховиков и магнитометр соединены с группой отдельных входов микро-ЭВМ, которая группой информационных выходов соединена с входом устройства управления реверсивными коммутаторами, входами блока преобразователя постоянного напряжения и с микроконтроллерами в каждом преобразователе постоянного напряжения по связанным осям X, Y, Z космического аппарата, при этом ШИМ-выходы микроконтроллеров соединены с управляющими входами инверторов, выходы которых через выпрямители являются выходами блока преобразователя постоянного напряжения, а по шинам питания соединены с источником бортового питания космического аппарата.
| Устройство формирования механического момента электромагнитом в магнитной системе ориентации космического аппарата | 2016 |
|
RU2672316C2 |
| Способ сброса кинетического момента инерционных исполнительных органов космического аппарата и устройство для реализации способа | 2015 |
|
RU2625687C2 |
| RU 2051840 C1, 10.01.1996 | |||
| US 4807835 A1, 28.02.1989 | |||
| US 3489372 A1, 13.01.1970. | |||

