Изобретение относится к строитель но-монтажным работам, в частности, к способам монтажа длинномерных конструкций в вертикальное положение.
Известен способ монтажа конструк,ций. в вертикальное положение подъемом их за верхнюю часть грузоподъемным механизмом с одновременным подтаскиванием низа конструкции на подвижном шарнире по опорной поверхности с последующей доводкой конструкции вантами в вертикальное положение til.
Известен способ монтажа длинномерных конструкций в вертикальное положение, включающий подъем верхней части конструкции грузоподъемным устройством с одновременным подтаскиванием ее нижней части по опорной поверхности полиспастом или краном с последующим выводом конструкции в проектное положение поворотом вокруг шарнира 2.
Однако при использовании известных споссэбов монтажа подъем верхней части конструкции и подтаскивание ее нижней части производят двумя отдельными тяговыми системами, работающими независимо, что усложняет монтаж и вызывает дополнительные энергозатраты. При использовании
известных способов требуется выполнение циклограмм подъема, определяющих соотношение величины подъема аппарата грузоподъемным устройством и величины следующего за этим перемещения низа аппарата, т.е. подъем осуществляется чередованием циклов работы различных тяговых механизмов, что требует синхронизации их работы,
10 усложняющей монтаж.
Цель изобретения - упрощение процесса монтажа и снижение его энергоемкости.
Указанная цель достигается соглас15но способу монтажа длинномерных конструкций в вертикальное положение, включающему подъем верхней части . конструкции грузоподъёмным устройством с одновременным подтаскиванием
20 ее нижней части по опорной поверхности с последующим выводом конструкции в проектное положение поворотом вокруг шарнира, нижнюю часть конструкции подтаскивают с помощью закреп25ленной на ней в месте строповки грузоподъемного устройства гибкой тяги с полиспастом, а подъем ведут циклично при постоянной длине гибкой тяГи до отклонения грузоподъемного устрой30ства до допустимого предела и послеЛУющем частичном роспуске полиспаста гибкой тяги до вывода конструкции , в проектное положение.
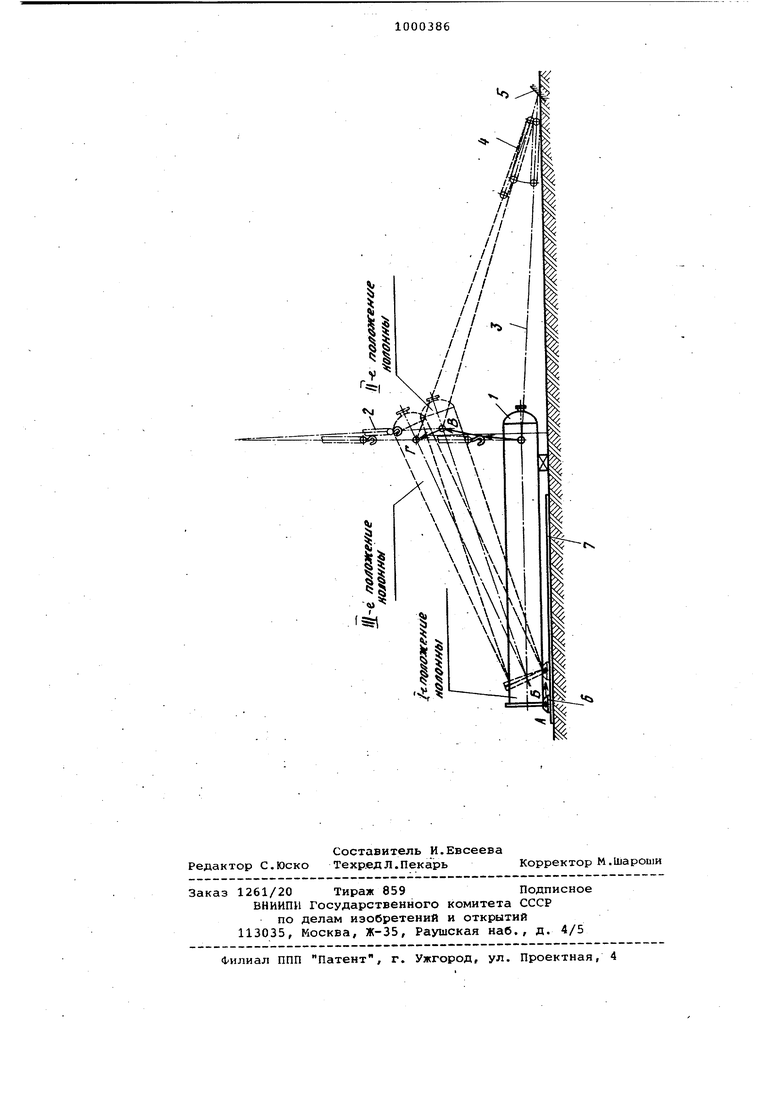
На чертеже представлена схема осуществления способа монтажа длинномерной конструкции в вертикальное положение.
Монтируемую длинномерную конструкцию 1 стропят полиспастом 2 грузо,подъемного механизма и закрепляют в месте строповки гибкую тягу 3, имеющую полиспаст 4, закрепленный к якорю 5. Низ длинномерной конструкции 1 через подвижный шарнир 6 установлен на опорной поверхности 7.
При стягивании грузового полиспас та 2 и при неизменной длине гибкой тяги 3 констру сция из положения 1 перемещается в положение II . Точка строповки -перемещается по траектории .дуги с радиусом, равным длине гибкой тяги 3. Низ аппарата при этом неподвижном шарнире 6 перемещается ( скользит ) по опорной .поверхности 7 из точки А в точку Б. Точка В, до которой осуществляют первую стадию подъема, характеризуется допускаемым углом отклонения грузового полиспаста 2 грузоподъемного устройства от вертикали. В положении конструкции tl полиспаст 4 гибкой тяги 3 частично распускают с одновременным подъемом конструкции с поворотом ее низа относительно, неподвижного в этот момент шарнира. 6. Подъем ведут до выхода места строповки в точку Г, котора также как и точка В характеризуется . допускаемым углом отклонения грузового полиспаста 2 грузоподъемного устройства от вертикали. После этого прекращают распускать полиспаст -4 гибкой тяги 3 и повторяют операцию подъема конструкции при неизменной длине гибкой тяги с подтаскиванием низа аппарата (конструкции ). Усилие подъема в грузовом полиспасте создает в гибкой тяге и самой конструкции ответные реакции. Реакция, возникающая вдоль конструкции, приводит
к перемещению конструкции, причем величина реакции растет от нуля до усилия, необходимого для перемещения конструкции.
Использование предлагаемого способа монтажа длинномерных конструкп ций обеспечит снижение энергоемкости так как подъем конструкции и подтаскивание низа конструкции осуществляются за счет одного тягового механизма. Это же обуславливает упрощение монтажа конструкции, так как исключается необходимость синхронизации двух тяговых механизмов-и создание специальных циклограмм для проведени монтажа.
Формула изобретения
Способ монтажа длинномерных конструкций в вертикальное положение включающий подъем верхней части конструкции грузоподъемным устройством с одновременным подтаскиванием ее нижней части по опорной поверхности с последующим выводом конструкции в проектное положение поворотом вокруг шарнира,о сличающийся тем, что, с целью снижения энергоемкости и упрощения процесса монтажа нижнюю часть конструкции подтаскивают с помощью закрепленной на ней в месте строповки грузоподъемного устройства Гибкой тяги с полиспастом а подъем ведут циклично при постоянной длине гибкой тяги до отклонения грузоподъемного устройства до допустимого предела и последующем частичном роспуске полиспаста гибкой тяги до вывода конструкции в проектное положение.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР №239529, кл. В 66 F 9/06, 1968.
2.Авторское свидетельство СССР 539826, кл. В 66 F 11/02, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ установки длинномерной конструкции в вертикальное положение | 1987 |
|
SU1444293A1 |
| Устройство для монтажа длинномерных вертикальных конструкций | 1989 |
|
SU1693219A1 |
| Способ монтажа конструкций | 1976 |
|
SU775048A1 |
| Способ подъема длинномерной конструкции в вертикальное положение | 1984 |
|
SU1310333A1 |
| СПОСОБ УСТАНОВКИ В ВЕРТИКАЛЬНОЕ ПОЛОЖЕНИЕ ДЛИННОМЕРНЫХ КОНСТРУКЦИЙ | 1970 |
|
SU262356A1 |
| Монтажное устройство | 1980 |
|
SU925856A1 |
| Способ монтажа стреловыми кранами верхних частей вертикальных конструкций и устройство для его осуществления | 1985 |
|
SU1270109A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ МОНТАЖА ВЕРТИКАЛЬНЫХ | 1971 |
|
SU307055A1 |
| Способ подъема длинномерных конструкций | 1977 |
|
SU652110A1 |
| Способ подъема длинномерных конструкций | 1978 |
|
SU740708A1 |