«5 t
met 1,
яилг
iHlKi k
я
It 5
ilMI.ViMlK
(%
nnm
III || I
ttf
I ff
«2«J «5 ff Put 1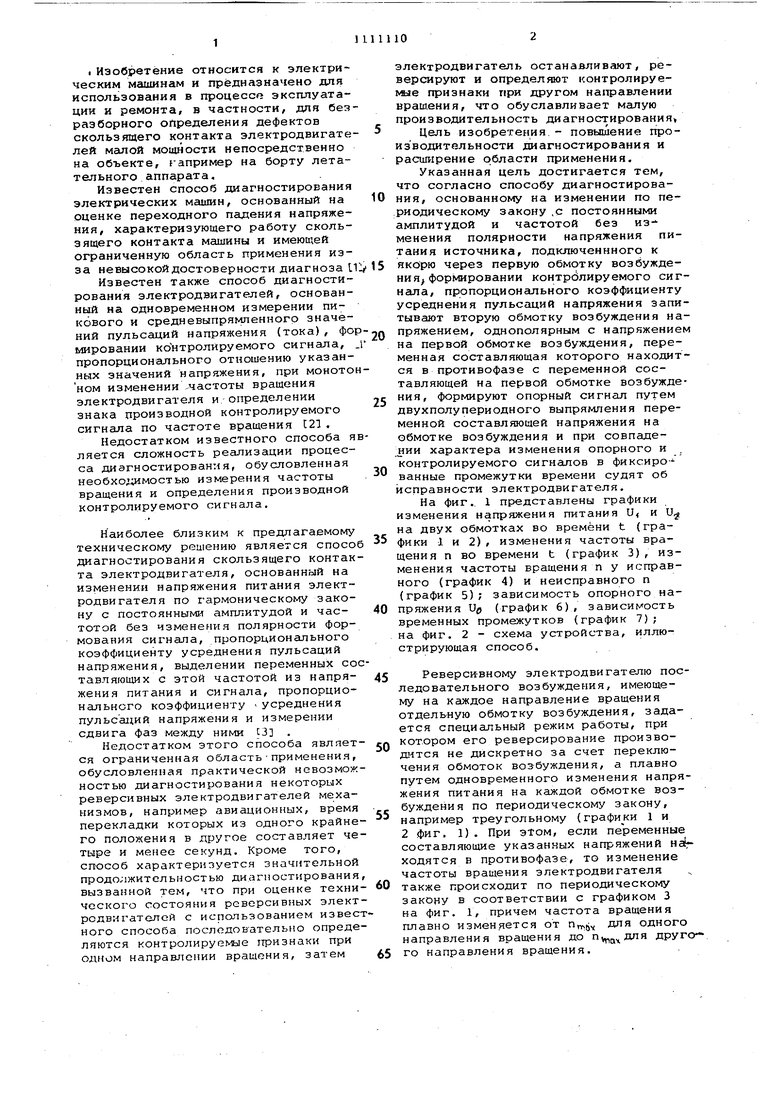

СПОСОБ ДИАГНОСТИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ С ДВУМЯ ОБМОТКАМИ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ, основанный на изменении по периодическому закону с постоянными амплитудой и частотой без изменения полярности напряжения питания источника подключенного к якорю электродвигателя через первую обмотку возбуждения, формировании контролируемого сигнала, пропорционального коэффициенту усреднения пульсаций напряжения, отличающийся тем, что, с целью повышения производительности диагностирования и расширения области применения, запитывают вторую обмотку возбуждения напряжением, однополярным с напряжением на первой обмотке возбуждения, переменная составляющая которого находится в протквофазе с переменной составляющей на первой обмотке возбуждения, формируют опорный сигнел путем двухполупериодного выпрямления переменной сое-j тавляющей напряжения на обмотке воз(Л буждения и при совпсшении характера изменения опорного и контролируемого сигналов в фиксированные промежутки времени судят об исправности электродвигателя.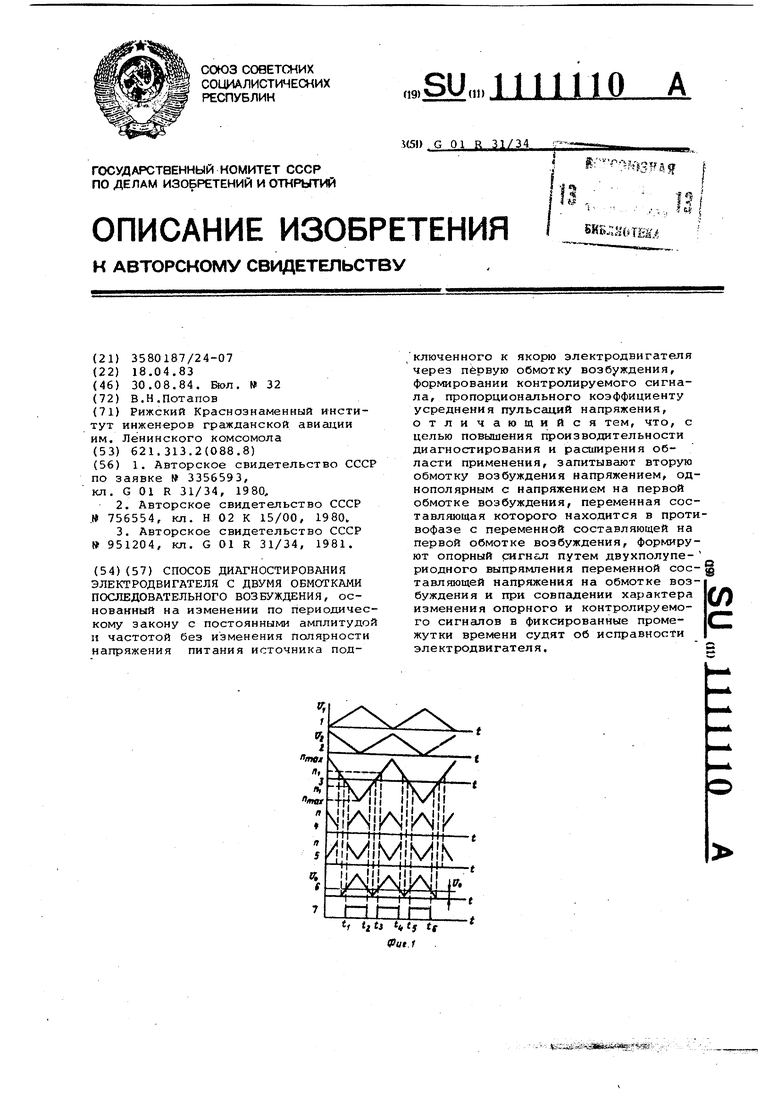
.issais; iSi3№ia« sff i3ifV . Изобретение относится к электрическим машинам и предназначено для использования в процессе эксплуатации и ремонта, в частности, для без разборного определения дефектов скользящего контакта электродвигате лей малой мощности непосредственно на объекте, fanpHMep на борту летательного аппарата. Известен способ диагностирования электрических машин, основанный на оценке переходного падения напряжения, характеризующего работу скользящего контакта машины и имеющей ограниченную область применения изза невысокой достоверности диагноза I Известен также способ диагностирования электродвигателей, основанный на одновременном измерении пикового и средневыпрямленногр значений пульсаций напряжения (тока), фо мировании контролйруемого сигнала, пропорционапьного отношению указанных значений напряжения, при моното ном изменении .частоты вращения электродвигателя и определении знака производной контролируемого сигнала по частоте вращения С23. Недостатком известного способа я ляется сложность реализации процесса диагностирования, обусловленная необхоу1мостью измерения частоты вращения и определения производной контролируемого сигнала. Наиболее близким к предлагаемому техническому решению является спосо диагностирования скользящего контак та электродвигателя, основанный на изменении напряжения питания электродвигателя по гармоническому закону с постоянными амплитудой и частотой без изменения полярности формования сигнала, пропорционального коэффициенту усреднения пульсаций напряжения, выделении переменных со тавляющих с этой частотой из напряжения питания и сигнала, пропорционального коэффициенту - усреднения пульсаций напряжения и измерении сдвига фаз между ними СЗ . Недостатком этого способа являет ся ограниченная областьприменения, обусловленная практической невозмож ностью диагностирования некоторых реверсивных электродвигателей механизмов, например авиационных, время перекладки которых из одного крайне го положения в другое составляет че тыре и менее секунд. Кроме того, способ характеризуется значительной продолжительностью диагностирования вызванной тем, что при оценке техни ческого состояния реверсивных элект родвигателей с использованием извес ного способа последов-ательно опреде ляются контролируемые ттризнаки при одном направлении вращения, затем электродвигатель останавливают, реверсируют и определяют контролируелме признаки при другом направлении вращ.ения, что обуславливает малую производительность диагностирования Цель изобретения,- повышение производительности диагностирования и расширение области применения. Указанная цель достигается тем, что согласно способу диагностирования, основанному на изменении по пе.риоДическому закону ,с постоянными амплитудой и частотой без из- менения полярности напряжения питания источника, подключеннного к якорю через первую обмотку возбуждения формировании контролируемого сигнала, пропорционального коэффициенту усреднения пульсаций напряжения запитывают вторую обмотку возбуждения напряжением, однополярным с напряжением на первой обмотке возбуждения, переменная составляющая которого находится в противофазе с переменной составляющей на первой обмотке возбуждения, формируют опорный сигнал путем двухполупериодного выпрямления переменной составляющей напряжения на обмотке возбуждения и при совпаде;нии характера изменения опорного и контролируемого сигналов в фиксированные промежутки времени судят об исправности электродвигателя. На фиг. 1 представлены графики изменения напряжения питания U, и U на двух обмотках во времени t (графики 1 и 2), изменения частоты вращения п во времени t (график 3), изменения частоты вращения п у исправного (график 4) и неисправного п (график 5); зависимость опорного напряжения и (график 6), зависимость временных промежутков (график 7); на фиг. 2 - схема устройства, иллюстрирующая способ. Реверсивному электродвигателю последовательного возбуждения, имеющему на каждое направление вращения отдельную обмотку возбуждения, задается специальный режим работы, при котором его реверсирование производится не дискретно за счет переключения обмоток возбуждения, а плавно путем одновременного изменения напряжения питания на каждой обмотке возбуждения по периодическому закону, например треугольному (графики 1 и 2 фиг. 1). При этом, если переменные составляющие указанных напряжений Haifходятся в противофазе, то изменение частоты вращения электродвигателя также происходит по периодическому закону в соответствии с графиком 3 на фиг. 1, причем частота вращения плавно изменяется от Пг для одного направления вращения до другого направления вращения.
Величина коэффициента усреднения пульсаций напряжения (тока) электродвигателя линейно зависит от изменения его частоты вращения, причем при увеличении частоты вращения значения коэффициента усреднения увеличиваются у исправного электродвигатепя (т.е. не имеющего дефектов скользящего контакта) и уменьшаются у неисправного. Указанная закономерность четко проявляется при изменении частоты вращения от максимально возможной по техническим условиям до величины п, составляющей 25-30% от максимально возможной.
Характер изменения значений коэффициента усреднения пульсаций напряжения в фиксированных диапазонах изменения частоты вращения (или напряжения на обмотках возбуждения) у исправного и неисправного электродвигателей существенно отличаются (графики 4 и 5 фиг. 1).
Таким образом, формируя опорный сигнал (график 6) путем двухполупериодного выпрямления.переменной состав ляющей напряжения на одной из обмоток возбуждения и сравнивая его с контролируемым (графики 4 и 5) в фиксированном диапазоне изменения напряжения на обмотках возбуждения, можно по совладению (или несовпадению) характера изменения (т.е. одновременного или разновременного возрастания или убывания) опорного и контролируемого сигналов обнаружить соответственно отсутствие (или наличие) дефектов в электродвигателе.
Задание фиксированного диапазона изменения частоты вращения (при ксэтором следует выполнять сравнение опорного и контролируемого сигналов) можно свести к заданию соответствующего фиксированного промежутка времени, в течение которого частота вращения контролируемого электродвигателя изменяется в выбранном фиксированном диапазоне.
На фиг. 1 показано формирование указанных временных промежутков ( ti/ t3 - Ьц, tj - tj, график 7) непрерывного сравнения значений опорного сигнала с постоянным напряжением Uc (график 6) и выделение моментов повьпиения значений опорного сигнсша величины Up .
Устройство реализующее предлагаемый способ, содержит регуляторы 1 и 2 напряжения, запитывающие обмотки возбуждения 3 и 4 контролируемого электродвигателя, в цепь якоря 5 которого включен датчик пульсаций на пряжения (тока) в виде добавочного сопротивления б, генератор 7 периодического сигнала, фазосдвигающую цепочку 8, двухполупериодный выпрямитель 9, компараторы 10 и 11, разделительный конденсатор 12, измерительные преобразователи по уровню пикового 13 и сред евыпрямпрпного 14 значений пульсаций напряжения, делительную схему 15, электронный ключ 16, индикатор 17.
Устройство работает следующим образом.
С выхода.генератора 7, монотонно изменяющееся по периодическому закону (например треугольному или синусоидальному) напряжение поступает непосредственно на управляющий вход регулятора 1 напряжения и через фазосдвигающую цепочку 8 (обеспечивающую сдвиг на 180°) на управляющий вход регулятора 2 напряжения. В качестве регуляторов напряженигт 1 и 2 можно использовать транзисторные компенсационные стабилизаторы напряжения, у которых внутреннее сопротивление регулирующего элемента (транзистора) зависит от величины управляющего сигнала. Эапитав входы регуляторов 1 и 2 постоянным напряжением, получаиот на их выходах (а следовательно, и на зажимах обмоток возбуждеиие электродвигателя) однополярные напряжения, примененные составляющие которых находятся в противофазе. Таким образом обеспечивается изменение частоты вращения в соответствии с графиком 3 на фиг. 1.
Формирование контролируемого сигНсша пропорционально коэффициенту усреднения пульсаций напряжения (тока) производится путем преобразования переменной составляющей пульсаций, поступающих через разделительный конденсатор 12, в постоянные напряжения по уровню пикового и средневыпрямленного значения в преобразователях 13 и 14 и вычисления их отношения с помощью делительной схемы 15.
Опорный сигнал формируется путем двухполупериодного выпрямления на- J пряжения генератора 7 с помощью блока 9 и одновременно поступает на оди из входов ключа коммутатора 16 и на один из входов компаратора 10. На другой вход компаратора 10 поступает постоянное напряжение Uo, величина которого выбрана из условия получения на выходе компаратора последовательности прямоугольных импульсов (график 7 на фиг. 1). Указанные импульсы управляют работой электронного ключа 16 и обеспечивают прохождение через него контролируемого и опорного сигналов в промежутки времени, когда частота вращения контролируемого электродвигателя вначале увеличивается от Пд до пгго., а затем уменьшается от пжач до п,.
Так как контролируемый и опорный сигиалы изменяются идентично у исправленного электродвигателя (гра
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3356593, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 756554, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
