(5) УСТРОЙСТВО АКУСТИЧЕСКОГО КАРОТАЖА СКВАЖИН
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ акустического каротажа скважин | 1980 |
|
SU890320A1 |
| Способ акустического каротажа | 1987 |
|
SU1469487A1 |
| СПОСОБ АКУСТИЧЕСКОГО КАРОТАЖА | 1990 |
|
RU2012018C1 |
| УСТРОЙСТВО АКУСТИЧЕСКОГО КАРОТАЖА СКВАЖИН | 1996 |
|
RU2096812C1 |
| Способ акустического каротажа иуСТРОйСТВО для ЕгО РЕАлизАции | 1979 |
|
SU828150A1 |
| Аппаратура для каротажа скважин | 1981 |
|
SU949612A1 |
| СПОСОБ АКУСТИЧЕСКОГО КАРОТАЖА | 1990 |
|
RU2012019C1 |
| Устройство акустического каротажа | 1977 |
|
SU693309A1 |
| СПОСОБ ВОЛНОВОГО АКУСТИЧЕСКОГО КАРОТАЖА | 2001 |
|
RU2190242C1 |
| СПОСОБ ВОЛНОВОГО АКУСТИЧЕСКОГО КАРОТАЖА | 2001 |
|
RU2178574C1 |
1
Изобретение относится к геофизическим приборам для разведки полезных ископаемых, в маетности к устройствам для акустического каротажа скважин.
Известны устройства акустического каротажа скважин, содержащие блоки корреляционной обработки принятых сигналов для повышения помехозащищенности и разрешающей способности метода
Известные устройства формируют корреляционную функцию сигнала либо из нескольких сдвинутых относительно друг друга простых акустических импульсов (сдвиг осуществляется за смет распределенного многоэлементного приемника) tl 1 , либо из сложного частотно-модулированногосигнала С2 и t3T..
Всем перечисленным устройствам присущи общие недостатки. Это, вопервых, малая амплитуда корреляционной функции и ее сравнительно большая ширина, так как используются сигналы с малой базой, во-вторых, сложность получения необходимых акус тических сигналов с заданнымипара метрами (использование многоэлементного зонда, формирование свип-сигнала), и, в-третьих, громоздкие схемы аналоговых корреляторов (, необходимость нескольких блоков усиления и
10 умнйжения в 1 3 , или присутствие в устройстве электромеханических и механических элементов как в 2 и 3 .
Наиболее близким по своей техни15ческой сущности к предлагаемому является устройство для акустического каротажа скважин, использующее акустические сигналы, модулированные
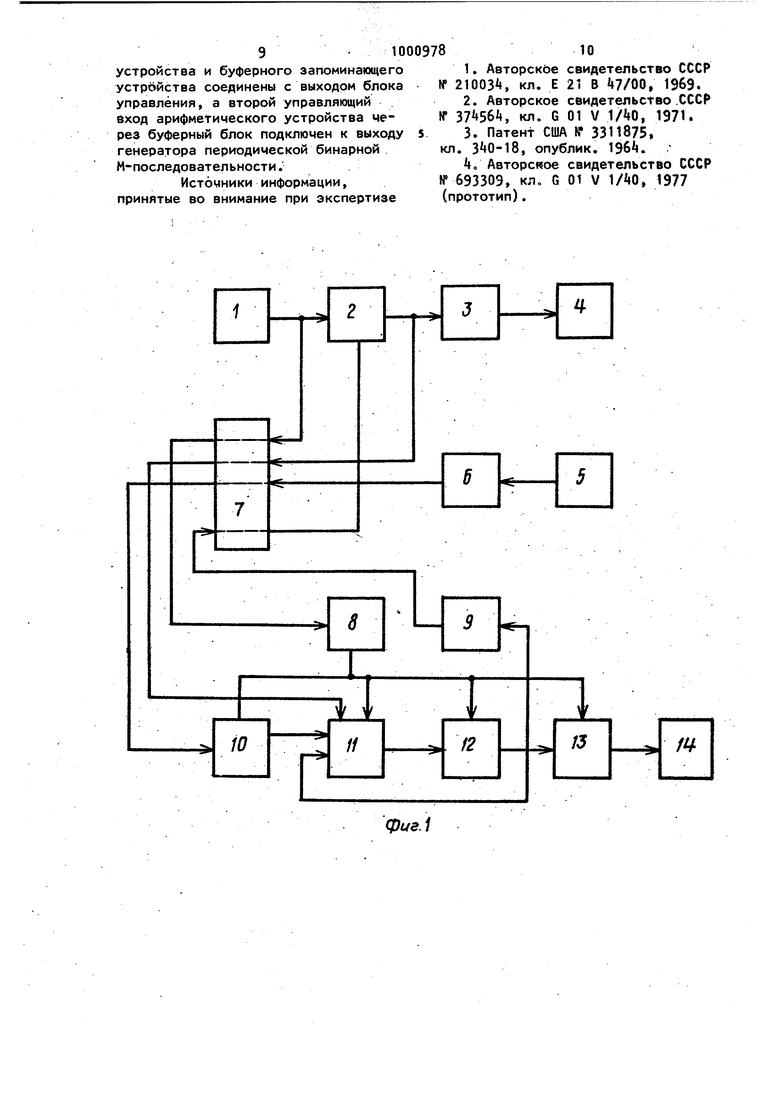
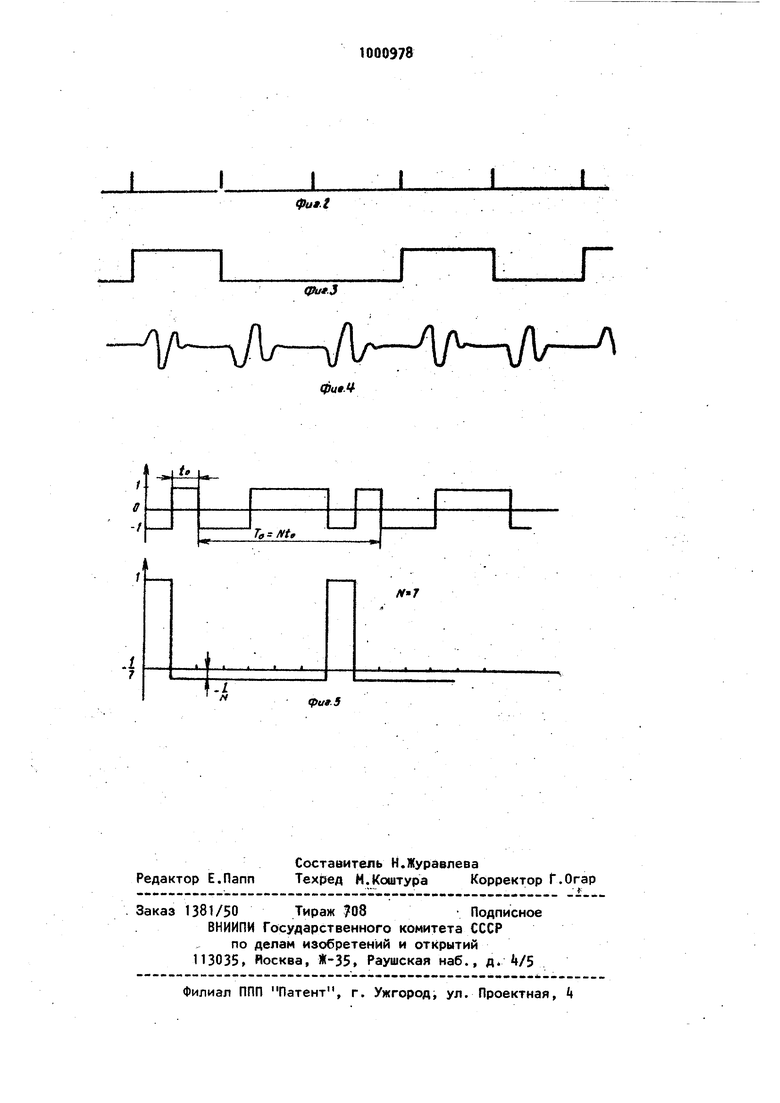
20 псевдослучайной последовательностью, и содержащее излучатель акустических колебаний, последовательно соединенный с формирователем импульсов возбуждения, генератором периодической бинарной М-последовательности и генератором тактовых импульсов, выход которого через буферный блок связан с входом блока управления, приемник акустических колебаний, последовательно соединенный с усилителем и буферным блоком, блок управления базой сигнала, соединенный через буферный блок с генератором периодичес кой бинарной М-последовательности, и .регистратор ft . Это устройство позволяет повысить разрешающую способность за счет повышения частоты зондирующих сигналов (до 2ПО кГц)5 и помехоустойчивость за счет уезелимения энергии сигнала путем расширения его базы при помощи модуляции высокочастотной несущей бинарной псевдослучайной М-последовательностьЮо Используемая схема обработки сигналов - демодуляция с последующей согласованной фильтрацией по видеочастоте - предполагает в своей основе достаточно узкополосные сигналы Так как в последнее время в :акустическом каротаже наметилась твердая тенденция к-снижению частоты зондирующих колебаний с одновременным расширением их спектра, то такие особенности прототипа, как высокая частота и узкополоснорть прбцесса следует отнести к его недостаткам. . Кроме этого, следует отметить, чт предлагаемая в прототипе система регулирования базы сигнала не является эффективной, так как блок управления базой сигнала управляется сигналом с приемника при большом уровне помех. Цель изобретения -повышение разрешающей способности и помехоустойчивости устройства акустического каротажа скважин : . Поставленная цель достигается тем что в известное устройство акустического каротажа скважин, содержащее излучатель акустических, колебаний, последовательно соединенный с формирователем импульсов возбуждения генератором периодической бинарной М-последовательности и генератором тактовых импульсов, выход которого через буферный блок связан с входом блока управления, приемник акустических колебаний последовательно свя занный с усилителем и буферным блоком, блок управления базой сигнала, соединенный через буферный блок с генератором периодической бинарной М-последовательности и регистратор, дополнительно заедены аналого-цифровой преобразователь, ярифме ическое устройство, оперативное запоминающее устройство и буферное запоминающее устройство, при этом выход усилителя через буферный блок последовательно соединены с аналого-цйф(ровым преобразователем, арифметическим устройством, оперативным запоминающим устройством, буферным запоминающим устройством, и регист- ратором, выход оперативного запоминающего устройства соединен с входом блока управления базой сигнала и с вторым информационным входом арифметического устройства, управляющие , входы, аналого-цифрового преобразователя, арифметического устройства, оперативного запоминающего устройства и буферного запоминающего устройства соединены с выходом блока управления, а второй управляющий вход арифметического устройства через .буферный блок подключен к выходу генератора периодической бинарной М-последовательности. Преимущество данного устройства состоит в возможности использования широкополосных импульсных зондирующих сигналов при высокой помехозащищенности и разрешающей способности метода. На фиг.1 приведена блок-схема устройства; на фиг,2 - представлены си1- налы на выходах генератора тактовых импульсо.в; на фиг.З - сигнал генератора периодической бинарной М-последовательности j на фиг - сигнал излучателя; на фиг.5 - периодическая .бинарная М-последоватёльность и ее дискретная функция автокорреляции. Устройство (фиг.1) содержит генератор 1 тактовых импульсов, генератор.2 периодической бинарной М-последовательности, формирователь 3 импульсов возбуждения, излучатель , приемник 5, усилитель 6, буферный блок 7, служащий для формирования и передачи сигналов по каротажному кабелю между скважинным зондом и наземной аппаратурой, блок 8 управления, позволяющий синхронизировать работу всех элементов, блок 9 управления базой сигнала, аналого-цифровой преобразователь 10, арифметическоеуустройство 11, оперативное запоминающее устройство 12, буферное запоминающее устройство 13, регистратор 14, Устройство работает следующим образом. Тактовый генератор 1 тактовых импульсов формирует непрерывную последовательность импульсов, частоты следования которых определяют частоты посылок зондирующих сигналов. Тактовые импульсы поступают на вход ге нератора 2 периодической бинарной М-последовательности, на выходе которого формируется напряжение периодической бинарной М-последовательности с длительностью одиночного элемента, равной периоду следования тактовых импульсов. Число элементов в периоде равное (2„-1), задают, исходя из необходимого числа накоплений. М-после довательность поступает на формирователь 3 импульсов возбуждения, который вырабатывает мощные электрические импульсы возбуждения излучателя i таким образом, чтобы фаза акустических импульсов на выходе излучателя была промодулирована напряжением М-последовательности , На фиго приведены сигналы на выходе излучателя k. Начальная фаза акустических импульсов принимает значения О или Л , в зависимости от уровня модулирующего напряжения последовательности. Конкрет ный вид формирователя 3 импульсов во буждения (фигИ ) определяется типом применяемого излучателя k, Акустичес кие сигналы преобразовываются приемНИКОМ 5 в электрические,- усиливаются усилителем 6 и поступают через буфер ный блок 7 на вход аналого-цифрового преобразователя 10. С выхода аналогоцифрового преобразователя 10 цифрово код поступает на первый вход арифмет тического устройства 11, На второй вход его с выхода оперативного Запоминающего устройства 12 поступают хранящиеся там коды сигналов предшествующих посылок. Результат с выхода арифметического устройства 11 заносится на место считанного кода в ячейку оперативного запоминающего устройства 12, Работа всех блоков синхронизируется блоком 8 управления, который из синхроимпульсов, поступакяцих от скважинного зонда, в частности от генератора 1 тактовых импульсов, формирует импульсы запуска, записи, чтения и т.п. для аналого-цифрового пребразователя 10, арифметического устройства 11, оперативного запоминающего устройства 12 и буферного эапо- инающего устройства 13. Блок В управления управляет режимом работы арифметического устройства 11 посредством напряжения М-последовательности, подаваемой на его управляющий вход из скважинного прибора через буферный блок 7 В зависимости от знака последовательности в каждом ее элементе, арифметическое устройство 11 вычисляет либо сумму, либо разность двух кодов, поступающих на его входы, таким образом, в сумматоре происходит синхронная демодуляция принятого сигнала и сложение его с сигналами предшествующих посылок. Количество посылок, подвергающихся суммированию,.равно, числу элементов в модулирующей М-последовательности о После окончания необходимых циклов суммирования результат из оперативного запоминающего устройства 12 перезаписывается в буферное запоминающее устройство 13 откуда выводится с необходимой скоростью на регистратор Т. Освобожденная же оперативная память опять используется для обработки сигналов. Необходимая база сигнала (период М-последовательности) задается блоком 9 управления базой сигнала, входным сигналом для которого является результирующий сигнал с выхода оперативного запоминающего устройства 12. Через буферный блок 7, блок 9 управления базой сигнала воздействует на генератор 2 периодической бинарной ||Т-последовательности, устанавливая необходимый ее период в зависимости от принятого им решенияi 1 При использовании данного устройства возможно значительное уменьшение периода посылок зондирующих сигналов. Практически это время можеТ быть сведено к длительности полезного участка сигнала (который обычно составляет мс при полной длительности сигнала порядка первых сотен миллисекунд). При известных способах каротажа при периодах посылок; меньших длительности сигнала одной посылки, происходит резкое ухудшение разрешающей способности метода, так как поле первых вступлений сигнала оказывает1ся забитым последующими фазами сигналов от предыдущей посылки. Возможность уменьшения периода
посыпок в данном устройстве без ухудшения разрешающей способности связана с такими корреляционными свойствами М-последовательностей, при которых функцию автокорреляции сигнала достаточно локализовать на временной оси.
На фиг„5 приведены периодическая М последовательность, состоящ ая из семи элементов, и ее нормированная автокорреляционная функция при дискретном сдвиге аргумента кратном длительности одного элемента. Исходя из характера автокорреляционной функции (наличие одного проямоугольного выброса в пределах периода при нулевом сдвиге и постоянный уровень, обратно пропорциональный количеству элементов последовательности при других сдвигах), ее можно рассматривать как некоторую фильтрующую функцию {во временной области) для сигналов, возбуждаемых с помощью данного устройства Во временном окне, определяемом главным выбросом, после описанных операций обработки просуммируются участки сигналов с длительностью, равной одному такту (элементу) от начала посылки Участки сигналов с длительностью большей одного такта, но приходящие в это же время (хвосты от предыдущих посылок) попадут в зону подавление, так как их суммарная величина будет определяться значениями функции автокорреляции при нулевом сдвиге. Таким образом, при нулевом сдвиге межд аргументами автокорреляционной функции модулирующей последовательности, результат будет представлять собой сигнал, приходящий во время, равное одному периоду посылкг1 от начала посылки с амплитудой, увеличенной в N раз, где N - число накоплений (число.элементов последовательности). Ме шающие колебания от предшествующих посылок сохранят исходный уровень. Таким образом, выбирая достаточной длину М-последовательности (число ее элементов) и сокращая период посылки зондирующих сигналов, можно обеспечить необходимое отношение сигнал/шум на выходе системы без ухудшения разрешающей способности метода и увеличения времени измереНИИ.
Предлагаемое устройство обладает тем преимуществом, что позволяет повысить помехоустойчивость аппарату| ьг акустического каротажа, используя при этом обычные импульсные зондирующие сигналы,-широко лР меняющиеся на практика
Расширение спектра частот излучателя при сохранении мощности излучения требования в общем противоречивые. Применение же данного устройства позволяет обеспечить необходимую энергию сигнала в заданной полосе частот без существенного увеличения времени измерения
Выходная информация в данном устройстве представлена в обычном виде в виде волновых картин (в цифровом коде), которые можно использовать для дальнейшей обработки и интерпретации.
Формула изобретения
Устройство акустического каротажа скважин, содержащее излучатель акустических колебаний, последовательно соединенный с формирователем импульсов возбуждения, генератором периодической бинарной М-последовательности и генератором тактовых импульсов, выход которого через буферный блок связан с входом блока управления, приемник акустических колебаний, последовательно связанный с усилителем и буферным блоком, блок управления базой сигнала соединенный через буферный блок с генератором периодической бинарной М-последовательности, и регистратор, о тличающееся тем, что, с цель повышения разрешающей способности и помехоустойчивости устройства, в него дополнительно введены аналого-цифровой преобразователь, арифметическое устройство, оперативное запоминающее устройство и буферное запоминающее устройство, при этом выход усилителя через буферный блок последовательно соединен с аналого-цифровым преобразователем, арифметическим устройством оперативным запоминавщим устройством, буферным запоминающим устройством .и регистратором, выход оперативного запоминающего устройства соединен с входом .блока управления базой сигнала и с вторым информационным входом арифметического устройства, управляющие входы аналого-цифрового преобразователя, арифметического устройства, оперативного запоминающего
устройства и буферного запоминающего устройства соединены с выходом блока управления, а второй управляющий вход арифметического устройства через буферный блок подключен к выходу генератора периодической бинарной М-последовательности.
Источники информации, принятые во внимание при экспертизе
10
О
I- 3
15
12
1Цфиг. 1
г
.1
и
.5
