Изобретение относится к геофизическим методам исследования скважи}, в частности к способам акустического каротажа, кроме того, его можно использовать в геофизической разведке, в частности в сейсморазведке с невзрывными источниками колебаний.
Цель изобретения - увеличение отношения сигнал/шум путем подавления . корреляционных шумов.
Сущность предлагаемого способа акустического каротажа состоит в том, что модуляцию зондирующих сигналов осуществляют в пределах не менее трех периодов модулирующей М-последовательности, что обеспечивает равенство корреляционных шумов слева и справа от масимума функции взаимной корреляции (ФВК) регистрируемого акустического сигнала и М-последо
3
вательности в интервале (- ,)
где - максимальная длительность отклика среды на одну посылку зондирующих акустических импульсов, равна
максимальной длительности полного акустического сигнала на входе приемного тракта. При этом период Тр М-последовательности выбирают исходя из условия Тр 7у (в соответствии с характером ее автокорреляционной функции). Для удобства принимаем Тр равным t (Т р Г). Максимум ФВК соответствует полезному сигналу и моменту времени t О, т.е. началу за
1ШСИ, причем запись осуществляют в интервале (0,t).
Обеспечение равенства амплитуд корреляционных шумов в интервале (- Г, t) облегчает следуютций этап их
20
Если дополнительно возбудить в исследуемой среде последовательность акустических импульсов с нулевой начальной фазой, длительностью не менее двух периодов модулирующей М-последовательности, с частотой следования импульсов, равной частоте следования импульсов в М-последовательности, и амплитудой, равной амплитуде зондирующих сигналов, преобразовать принятые сигналы в цифровой код (получается последовательность из +1) и суммировать с результатом корреляционной обработки сигналов предшествующих посылок, то в результирующей записи будут полнЪстью отсутствовать корреляционные шумы.
При этом между последовательностью акустических импульсов, модулированных М-последовательностью с длительностью -не менее трех ее периодов, и
эффективного подавления. Оптимальным .является осуществление модуляции зондирующих сигналов в пределах трех периодов М-последовательности, так
как увеличение числа ее периодов не 25 дополнительно возбуждаемой последо- приводит к снижению уровня корреляци- вательностью акустических импульсов онных шумов, производительность каро- с нулевой начальной фазой необходима тажа при этом падает.
Хотя запись сигналов осуществляется в интервале (0,1), подавление кор-30 ды, вызванных возбуждением первой реляционных шумов необходимо осущест- последовательности (длительность каж- влять в интервале ,:), т.е. не только справа, но и слева от.полезного сигнала. Это связано с тем, что
35
пауза не менее f , Такая пауза нужна для исключения влияния откликов срекаждый из шумовых импульсов представляет собой отклик среды на одну посылку зондирующих сигналов, т.е. имеет длительность О. Поэто в пределах (-€,0) корреляционные шумы
дого из которых равна Т) на дополнительно возбуждаемую последователь- ность.
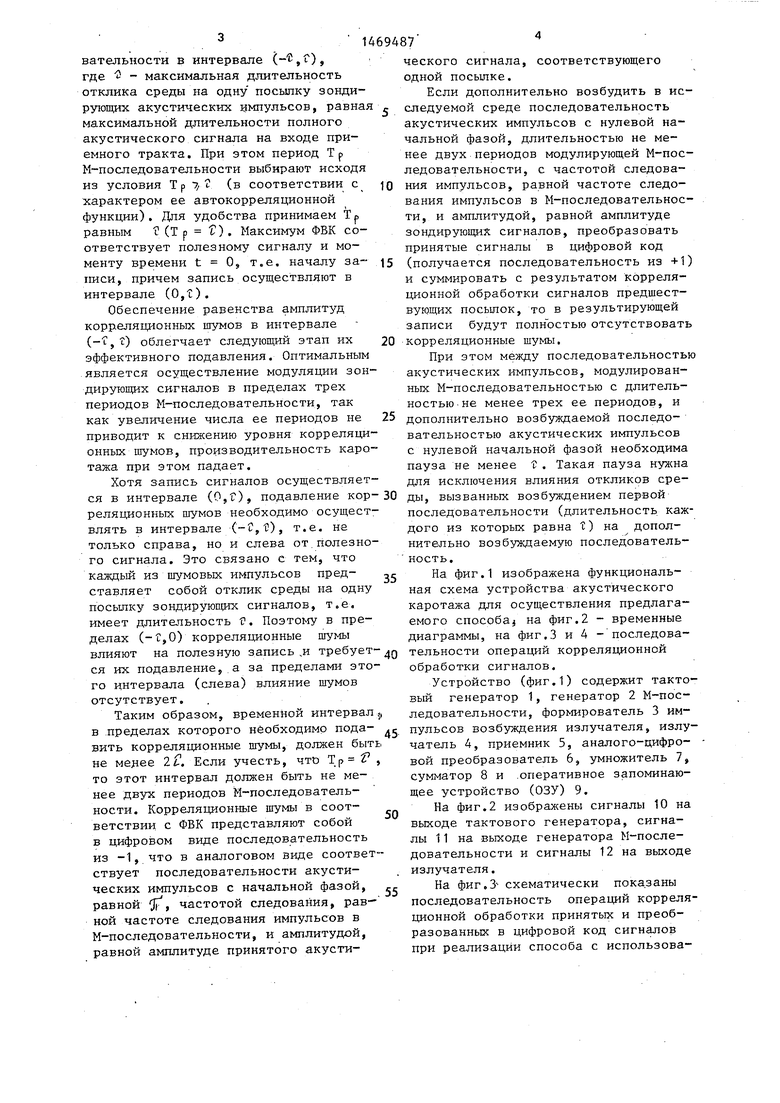
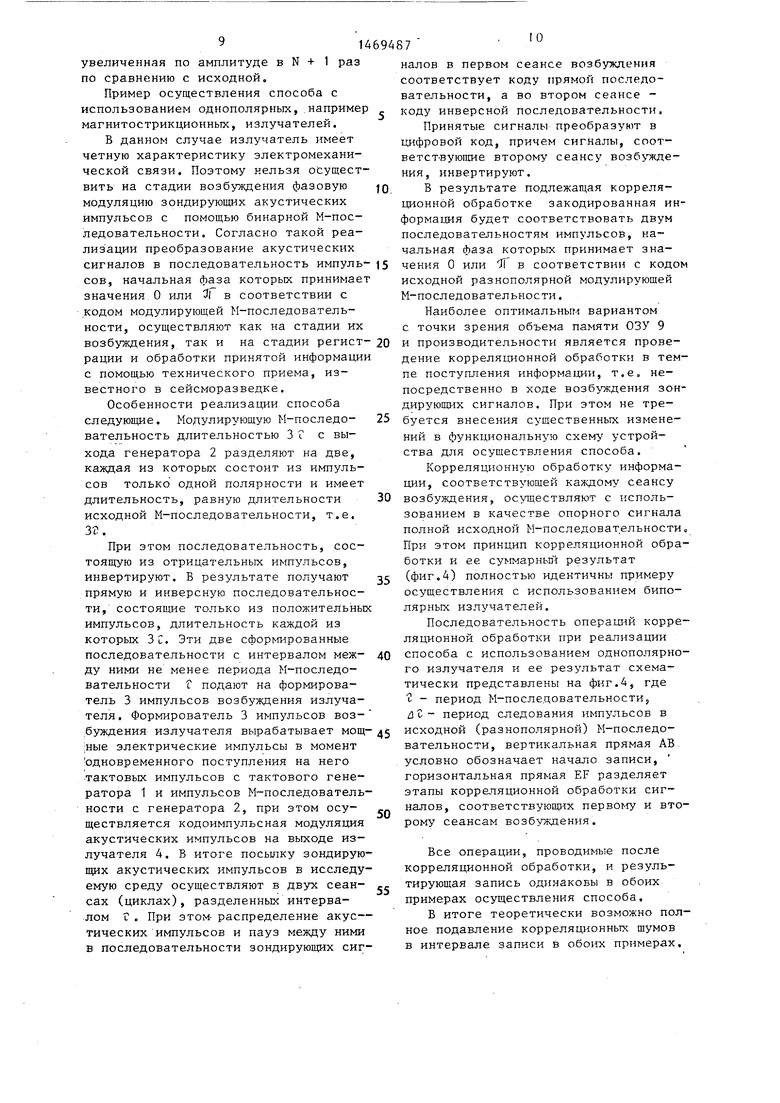
На фиг.1 изображена функциональная схема устройства акустического каротажа для осуществления предлагаемого способаj на фиг.2 - временные диаграммы, на фиг.З и 4 - последовавлияют на полезную запись ,и требует- д тельности операций корреляционной
ся их подавление,.а за пределами это- обработки сигналов.
го интервала (слева) влияние шумов Устройство (фиг.1) содержит тактоотсутствует.
Таким образом, временной интервал i
вый генератор 1, генератор 2 М-последовательности, формирователь 3 им- -Р
50
в пределах которого необходимо пода- пульсов возбуждения излучателя, излу- вить корреляционные шумы, должен быть чатель 4, приемник 5, аналого-цифро вой преобразователь 6, умножитель 7, сумматор 8 и .оперативное запоминающее устройство (ОЗУ) 9.
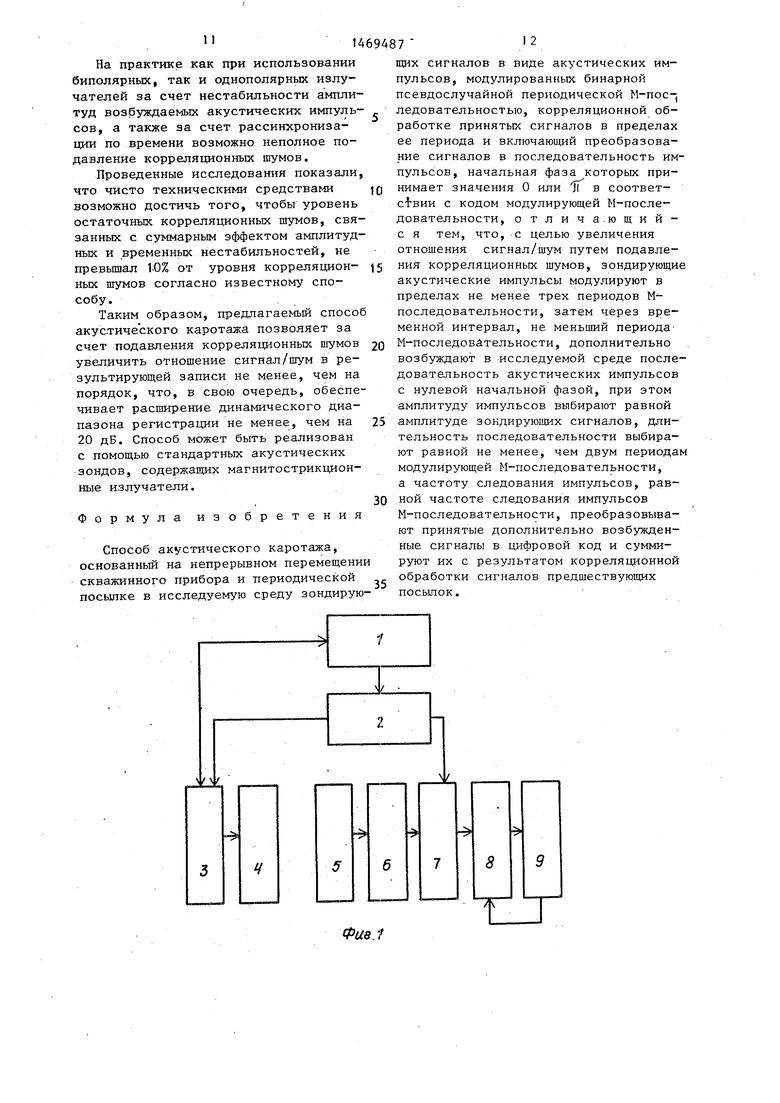
На фиг.2 изображены сигналы 10 на выходе тактового генератора, сигналы 11 на выходе генератора М-последовательности и сигналы 12 на выходе излучателя.
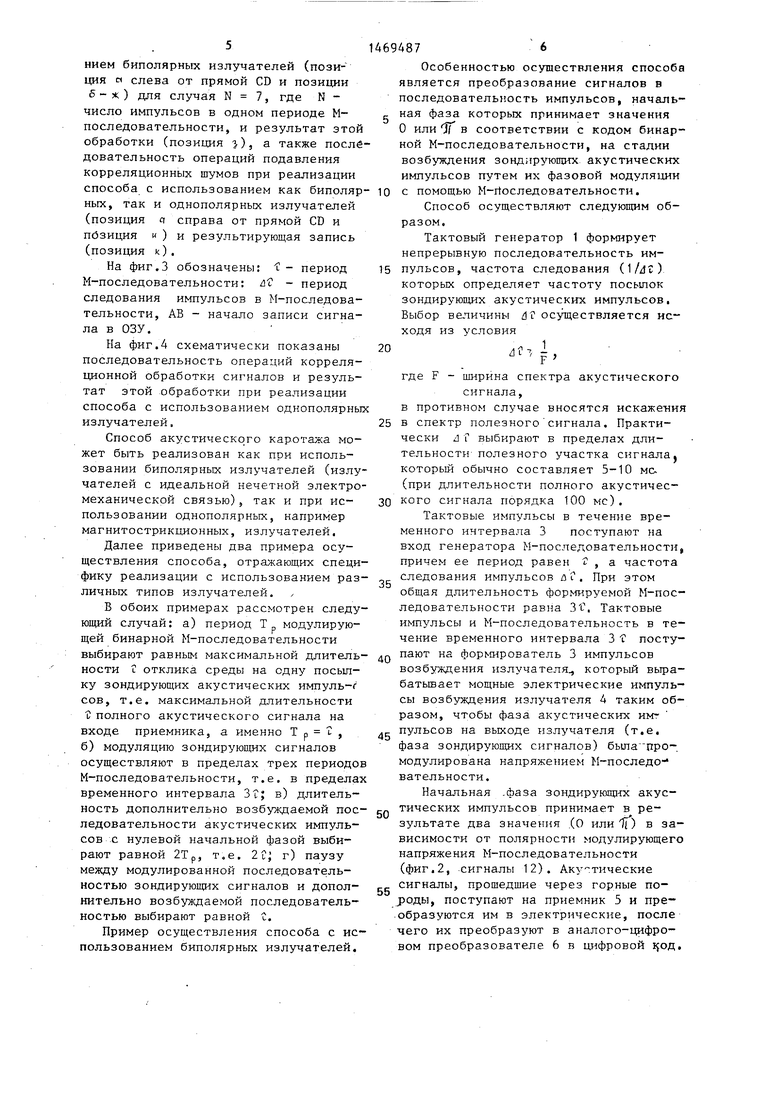
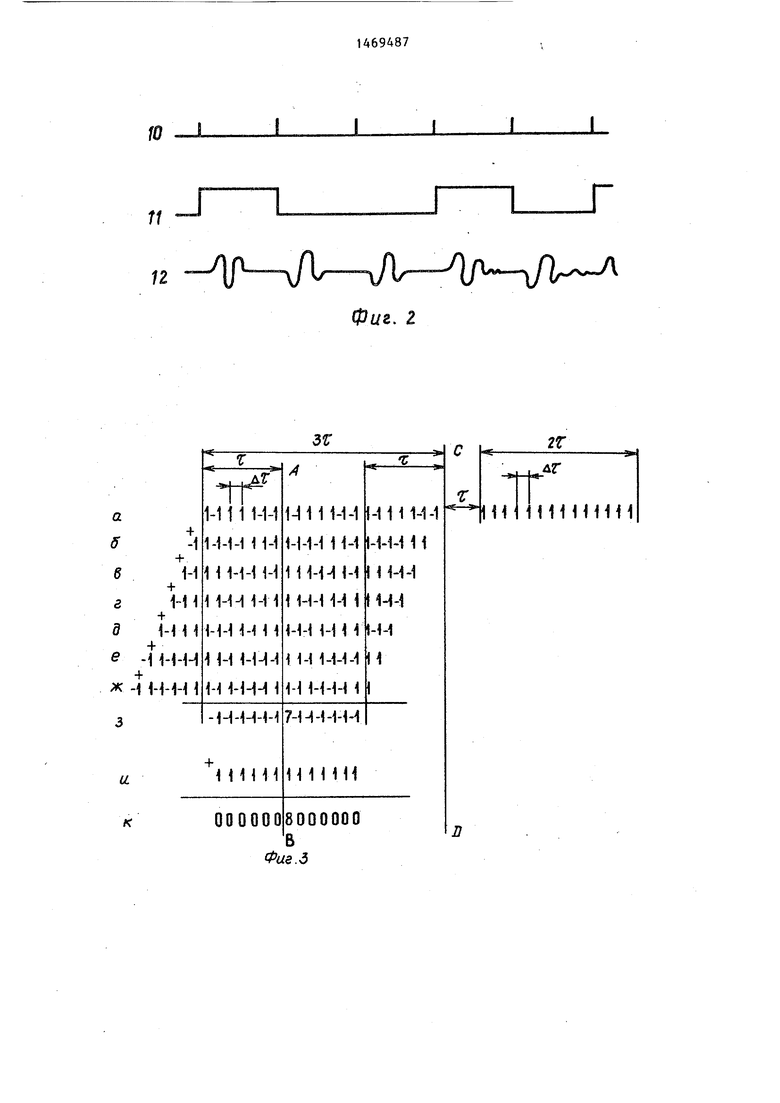
На фиг.З- схематически показаны последовательность операций корреляционной обработки принятых и преобразованных в цифровой код сигналов при реализации способа с использоване медее 2t. Если учесть, что Тр- , то этот интервал должен быть не менее двух периодов М-последовательности. Корреляционные шумы в соответствии с ФБК представляют собой в цифровом виде последовательность из -1, что в аналоговом виде соответствует последовательности акустических импульсов с начальной фазой, равной ОГ , частотой следования, рав ной частоте следования импульсов в М-последовательности, и амплитудой, равной амплитуде принятого акусти
0
5
0
ческого сигнала, соответствующего одной посылке.
Если дополнительно возбудить в исследуемой среде последовательность акустических импульсов с нулевой начальной фазой, длительностью не менее двух периодов модулирующей М-последовательности, с частотой следования импульсов, равной частоте следования импульсов в М-последовательности, и амплитудой, равной амплитуде зондирующих сигналов, преобразовать принятые сигналы в цифровой код (получается последовательность из +1) и суммировать с результатом корреляционной обработки сигналов предшествующих посылок, то в результирующей записи будут полнЪстью отсутствовать корреляционные шумы.
При этом между последовательностью акустических импульсов, модулированных М-последовательностью с длительностью -не менее трех ее периодов, и
дополнительно возбуждаемой последо- вательностью акустических импульсов с нулевой начальной фазой необходима
ды, вызванных возбуждением первой последовательности (длительность каж-
пауза не менее f , Такая пауза нужна для исключения влияния откликов среды, вызванных возбуждением первой последовательности (длительность каж
дого из которых равна Т) на дополнительно возбуждаемую последователь- ность.
На фиг.1 изображена функциональная схема устройства акустического каротажа для осуществления предлагаемого способаj на фиг.2 - временные диаграммы, на фиг.З и 4 - последова Устройство (фиг.1) содержит тактовый генератор 1, генератор 2 М-последовательности, формирователь 3 им- -Р
да- быт
- етьвет й, аввй, нием биполярных излучателей (позиция о слева от прямой CD и позиции
б - X) для случая N 7, где N - число импульсов в одном периоде М- последовательности, и результат этой обработки (позиция -}), а также последовательность операций подавления корреляционных шумов при реализации
1469А876
Особенностью осуществления способа является преобразование сигналов в последовательность импульсов, началь- g нал фаза которых принимает значения О или ЗГ в соответствии с кодом бинарной М-последовательности, на стадии возбуждения зондирующих акустических импульсов путем их фазовой модуляции
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКУСТИЧЕСКОГО КАРОТАЖА | 1990 |
|
RU2012018C1 |
| СПОСОБ АКУСТИЧЕСКОГО КАРОТАЖА | 1990 |
|
RU2012019C1 |
| Способ акустического каротажа скважин | 1980 |
|
SU890320A1 |
| Устройство акустического каротажа скважин | 1981 |
|
SU1000978A1 |
| Импульсно-акустический способ определения местоположения внутритрубного очистного снаряда в магистральном трубопроводе | 2018 |
|
RU2691779C1 |
| Устройство акустического каротажа | 1977 |
|
SU693309A1 |
| Способ акустического каротажа | 1977 |
|
SU693306A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АКУСТИЧЕСКИХ ПАРАМЕТРОВ ГОРНЫХ ПОРОД | 2000 |
|
RU2178573C1 |
| Способ сейсмической разведки | 1990 |
|
SU1749862A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕМНЫХ ИЗМЕНЕНИЙ В ПРЕДЕЛАХ НАБЛЮДАЕМОГО ОГРАНИЧЕННОГО ПРОСТРАНСТВА НЕЗАВИСИМО ОТ МЕСТА ВОЗНИКНОВЕНИЯ ЭТИХ ИЗМЕНЕНИЙ В ПРЕДЕЛАХ ЭТОГО ПРОСТРАНСТВА. | 2012 |
|
RU2614134C2 |
Изобретение относится к геофизическим методам исследования скважин и может быть использовано для решения задачи эффективного вьщеления полезного сигнала на фоне помех в широком динамическом диапазоне регистрации. Способ может быть также применен в сейсморазведке с использованием невзрывных источников колебаний. Цель изобретения - увеличение отношения сигнал/шум путем подавления корреляционных шумов. Цель достигается модуляцией зондируюЕЦ-ix акустических импульсов в пределах не менее трех периодов бинарной псевдослучайной периодической М-последователь- ностью с последуюшкм дополнительным возбуждением в исследуемой среде последовательности акустических импульсов с нулевой начальной фазой через временной интервал, не меньший периода М-последовательности. При этом длительность возбуждаемор: последовательности равна не менее, чем двум периодам модулирующей М-последовательности. Амплитуда акустических импульсов равна амплитуде зондирую- mjix сигналов, а частота следования акустических импульсов равна частоте следования импульсов в М-последова- тельности. Затем осуществляют преобразование принятых дополнительно возбужденных сигналов в цифровой код и суммирование с результатом корреляционной обработки сигналов предше- cтвyюш x посьшок. 4 ил. 2 1 О) со 4 00
Способ осуществляют следующим разом.
Тактовый генератор 1 формируе непрерывную последовательность и 15 пульсов, частота следования (l/j которых определяет частоту посыл зондирующих акустических импульс Выбор величины df осуществляется ходя из условия
20
р
способа с использованием как биполяр- ю с помощью М-йоследовательности. ных, так и однополярных излучателей (позиция CI справа от прямой CD и пбзиция и ) и результирующая запись (позиция k),
На фиг.З обозначены: L - период М-последовательности; -йГ - период следования импульсов в М-последовательности, АВ - начало записи сигнала в ОЗУ.
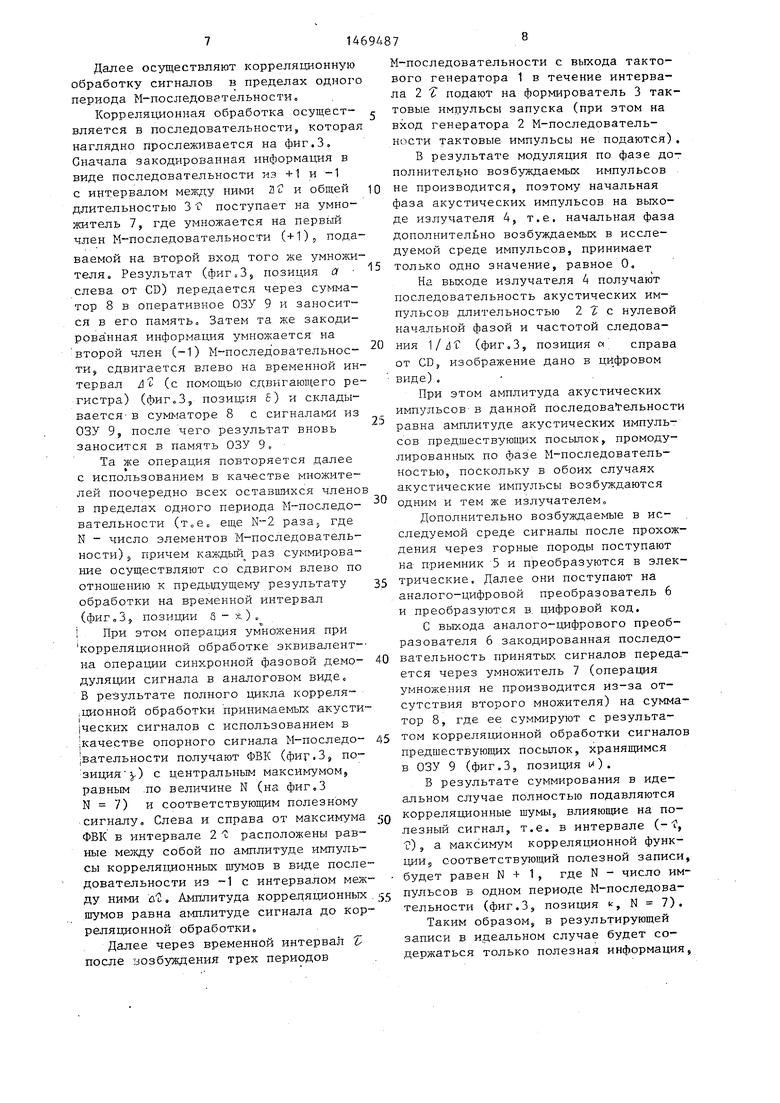
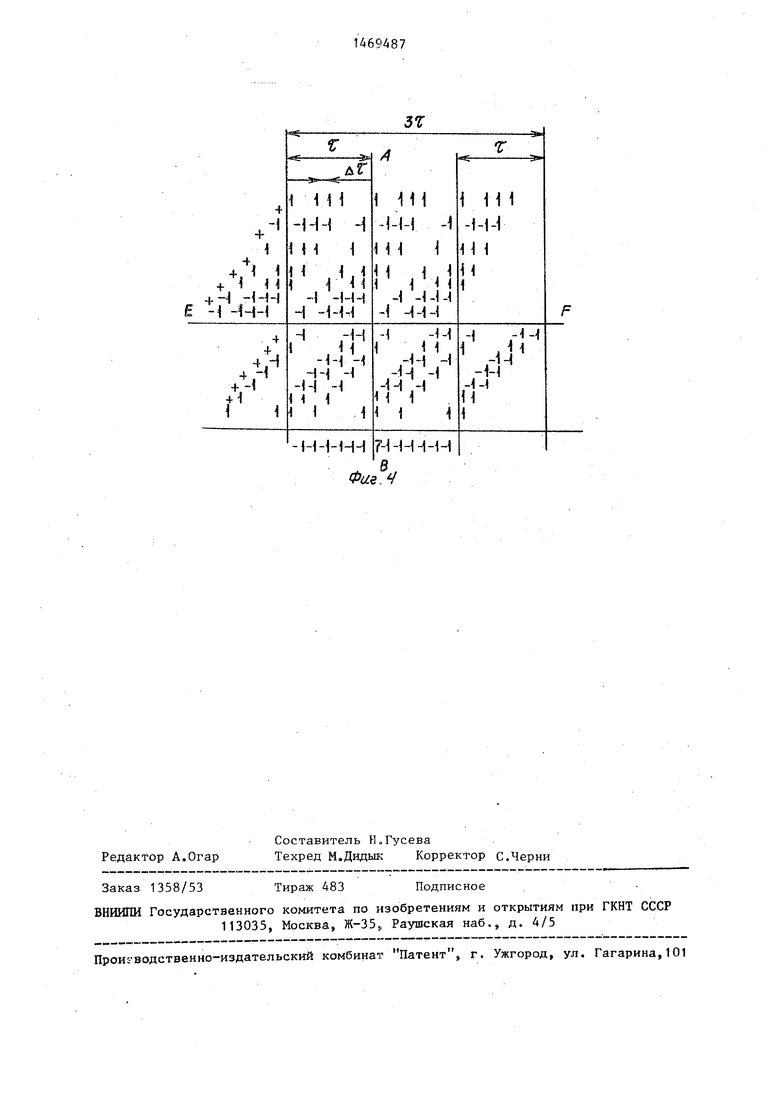
На фиг.4 схематически показаны последовательность операций корреляционной обработки сигналов и результат этой обработки при реализации способа с использованием однополярных излучателей.
Способ акустического каротажа может быть реализован как при использовании биполярных излучателей (излучателей с идеальной нечетной электромеханической связью), так и при использовании однополярных, например магнитострикционных, излучателей.
Далее приведены два примера осуществления способа, отражающих специфику реализации с использованием различных типов излучателей.
Б обоих примерах рассмотрен следугде F - ширина спектра акустичес
сигнала,
в противном случае вносятся иска 25 в спектр полезного сигнала. Прак чески л i выбирают в пределах дл тельности полезного участка сигн который обычно составляет 5-10 м (при длительности полного акусти кого сигнала порядка 100 мс).
Тактовые импульсы в течение в менного интервала 3 поступают вход генератора М-последовательн причем ее период равен t , а час следования импульсов дГ. При это общая длительность формируемой М ледовательности равна Bf, Тактов импульсы и М-последовательность
30
35
ющий случай: а) период Тр модулирующей бинарной М-последовательности
Тактовые импульсы в течение временного интервала 3 поступают на вход генератора М-последовательности причем ее период равен t , а частота следования импульсов дГ. При этом общая длительность формируемой М-последовательности равна Bf, Тактовые импульсы и М-последовательность в течение временного интервала 3 Г постувыбирают равным максимальной длитель- 40 ° формирователь 3 импульсов ности L отклика среды на одну посылку зондирующих акустических импуль-г сов, т.е. максимальной длительности С полного акустического сигнала на входе приемника, а именно Т р t , б) модуляцию зондирующих сигналов
45
возбуждения излучателя который выра- батьшает мощные электрические импульсы возбуждения излучателя Д таким образом, чтобы фаза акустических имг пульсов на выходе излучателя (т.е. фаза зондирующих сигналов) модулирована напряжением М-последовательности.
осуществляют в пределах трех периодов М-последовательности, т.е. в пределах временного интервала ЗТ; в) длительность дополнительно возбуждаемой последовательности акустических импульсов .с нулевой начальной фазой выбирают равной 2Тр, т.е. 2 С г) паузу между модулированной последовательностью зондирующих сигналов и допол- gg сигналы, прошедщие через горные по
нительно возбуждаемой последовательностью выбирают равной t.
Пример осуществления способа с использованием биполярных излучателей.
оды, поступают на приемник 5 и пр образуются им в электрические, посл чего их преобразуют в аналого-цифро вом преобразователе 6 в цифровой цо
Способ осуществляют следующим образом.
Тактовый генератор 1 формирует непрерывную последовательность им- пульсов, частота следования (l/jr) которых определяет частоту посылок зондирующих акустических импульсов. Выбор величины df осуществляется исходя из условия
с помощью М-йоследовательности.
20
р
где F - ширина спектра акустического
сигнала,
в противном случае вносятся искажения в спектр полезного сигнала. Практически л i выбирают в пределах длительности полезного участка сигнала, который обычно составляет 5-10 мс- (при длительности полного акустического сигнала порядка 100 мс).
Тактовые импульсы в течение временного интервала 3 поступают на вход генератора М-последовательности причем ее период равен t , а частота следования импульсов дГ. При этом общая длительность формируемой М-поседовательности равна Bf, Тактовые импульсы и М-последовательность в те
° формирователь 3 импульсов
возбуждения излучателя который выра- батьшает мощные электрические импульсы возбуждения излучателя Д таким образом, чтобы фаза акустических имг пульсов на выходе излучателя (т.е. фаза зондирующих сигналов) модулирована напряжением М-последовательности.
Начальная .фаза зондирующих акустических импульсов принимает в результате два значения ХО или 1() в зависимости от полярности модулирующего напряжения М-последовательности (фиг.2, сигналы 12). Акустические
сигналы, прошедщие через горные по
оды, поступают на приемник 5 и преобразуются им в электрические, после чего их преобразуют в аналого-цифровом преобразователе 6 в цифровой цор,.
Далее осуществляют корреляционную обработку сигналов в пределах одного периода М-последовательностИо
Корреляционная обработка осущест- вляется в последовательности, которая наглядно прослеживается на фиг.З, Сначала закодированная информация в виде последовательности из +1 и -1 с интервалом между 21 и общей длительностью 31 поступает на умножитель 7, где умножается на первый член М-последовательности (+1), подаваемой на второй вход того же умножителя. Результат ( позиция а слева от CD) передается через сумматор 8 в оперативное ОЗУ 9 и заносится в его память о Затем та же закоди- рова:нная информация умножается на второй член (-1) М-последовательности сдвигается влево на временной ин
тервал А (с помощью сдвигающего регистра) (фигЛ5 позиц15Я Б) и складывается- в сум аторе 8 с сигналаг-ги из ОЗУ 9, после чего результат вновь заносится в память ОЗУ 9
Та же операция повторяется далее с использованием в кач-естве множителей поочередно всех оставшихся члено в пределах одного периода М-последовательности (т„е. еще N-2 раза где N - число элементов М-последовательности) 5 причем каждый раз суммирование осуществляют со сдвигом влево по отношению к предьщущему результату обработки на временной интервал ( позиции а - -А ) . j При этом операция умножения при корреляционной обработке эквивалентна операции синхронной фазовой демо- дуляции сигнала в аналоговом виде. В результате полного цикла корреля- ;ционной обработки принимаемых акусти |ческих сигналов с использованием в :качестве опорного сигнала М-последо- ;вательности получают ФВК (фиг.З, по- зиция ,) с центральным максимумом равным .по величине N (на фиг«3 N 7) и соответствующим полезному сигналу. Слева и справа от максимума ФВК в интервале 2 расположены равные мелсду собой по амплитуде импульсы кoppeляп oнныx шумов в виде последовательности из -1 с интервалом между ними й1, Амплитуда корреляционных .шумов равна ai-шлитуде сигнала до корреляционной обработкие
Далее через временной интервал после возбуждения трех периодов
0
35 40 45 0 55М последовательности с выхода тактового генератора 1 в течение интервала 2 подают на формирователь 3 тактовые имцульсы запуска (при этом на вход генератора 2 М-последовательности тактовые импульсы не подаются), В результате модуляция по фазе до- полнител1гно возб-уяодаемых импульсов не производится, поэтому начальная фаза акустических импульсов на выходе излучателя 4, т.е. начальная фаза дополнительно возбуждаемых в исследуемой среде импульсов, принимает только одно значение, равное 0.
На выходе излучателя 4 получают последовательность акустических импульсов длительностью 21с нулевой начальной фазой и частотой следования 1/ЛТ (фиг.З, позиция а справа от CD, изображение дано в ци фровом виде).
При этом амплитуда акустических импульсов в данной последовательности равна амплитуде акустических импульсов предшествующих посылок, промоду- лированных по фазе М-последователь- ностью, поскольку в обоих случаях акустические импульсы возбуждаются одним и тем же излучателем.
Дополнительно возбуждаемые в исследуемой среде сигналы после прохождения через горные породы поступают на приемник 5 и преобразуются в электрические. Далее они поступают на аналого-цифровой преобразователь 6 и преобразуются в. цифровой код.
С выхода аналого-цифрового преобразователя 6 закодированная последовательность принятых сигналов передается через умножитель 7 (операция умножения не производится из-за отсутствия второго множителя) на сумматор В, где ее суммируют с результатом коррелятдионной обработки сигналов предшествующих посылок, хранящимся в ОЗУ 9 (фиг.З, позиция w).
В результате суммирования в идеальном случае полностью подавляются корреляционные шумы, влияющие на полезный сигнал, т.е. в интервале (-, f), а максимум корреляционной функ- циид соответствующий полезной записи, будет равен N - 1 , где N - число импульсов в одном периоде М-последовательности (фиг.З, позиция ьг, N 7).
Таким образом, в результирующей записи в идеальном случае будет содержаться только полезная информация,
увеличенная по амплитуде в N + 1 раз по сравнению с исходной.
Пример осуществления способа с использованием однополярных, например магнитострикционных, излучателей.
В данном случае излучатель имеет четную характеристику электромеханической связи. Поэтому нельзя осуществить на стадии возбуждения фазовую модуляцию зондирующих акустических импульсов с помощью бинарной М-пос- ледовательности. Согласно такой реализации преобразование акустических сигналов в последовательность импуль сов, начальная фаза которых принимае значения О или 1 в соответствии с кодом модулирующей М-последователь- ности, осуществляют как на стадии их возбуждения, так и на стадии регист рации и обработки принятой информаци с помощью технического приема, известного в сейсморазведке.
Особенности реализации способа следующие. Модулирующую М-последо- вательность длительностью 3 Г с выхода генератора 2 разделяют на две, каждая из которых состоит из импульсов только одной полярности и имеет длительность, равную длительности исходной М-последовательности, т,е. 3i,
При этом последовательность, состоящую из отрицательных импульсов, инвертируют. В результате получают прямую и инверсную последовательности, состоящие только из положительны импульсов, длительность каждой из которых ЗС. Эти две сформированные последовательности с интервалом между ними не менее периода М-последо- вательности Г подают на формирователь 3 импульсов возбуждения излучателя. Формирователь 3 импульсов воз;буждения излучателя вырабатывает мощ дае электрические импульсы в момент одновременного поступления на него тактовьк импульсов с тактового генератора 1 и импульсов М-последователь ности с генератора 2, при этом осуществляется кодоимпульсная модуляция акустических импульсов на выходе излучателя 4. В итоге посылку зондирующих акустических импульсов в исследуемую среду осуществляют в двух сеан- сах (циклах), разделенньк интервалом Г . При этом- распределение акус- тических импульсов и пауз между ними в последовательности зондирующих сиг
0
5
0
5 0
5 г
5
0
0
налов в первом сеансе возбуждения соответствует коду прямой последовательности, а во втором сеансе - коду инверсной последовательности.
Принятые сигналы преобразуют в цифровой код, причем сигналы, соответствующие второму сеансу возб ткде- ния, инвертируют.
В результате подлежащая корреляционной обработке закодированная информация будет соответствовать двум последовательностям импульсов, начальная фаза которых принимает значения О или Л в соответствии с кодом исходной разнополярной модулирующей М-последовательности,
Наиболее оптимальным вариантом с точки зрения обьема памяти ОЗУ 9 и производительности является проведение корреляционной обработка в темпе поступления информации, т.е. непосредственно в ходе возбуждения зондирующих сигналов. При этом не требуется внесения существенных изменений в функциональную схему устройства для осуществления способа.
Корреляционную обработку информации, соответствующей каждому сеансу возбуждения, осуществляют с использованием в качестве опорного сигнала полной исходной М-последоват.ельности, При этом принцип корреляционной обработки и ее суммарньп результат (фиг,4) полностью идентичны примеру осуществления с использованием биполярных излучателей.
Последовательность операций корреляционной обработки при реализации способа с использованием однополярно- го излучателя и ее результат схематически представлены на фиг.4, где 1 - период М-последовательности, d C- период следования импульсов в исходной (разнополярной) М-последовательности, вертикальная прямая АВ, условно обозначает начало записи, горизонтальная прямая EF разделяет этапы корреляционной обработки сигналов, соответствующих пepвo fy и второму сеансам возбуждения.
Все операции, проводимые после корреляционной обработки, и результирующая запись одинаковы в обоих примерах осуществления способа,
Б итоге теоретически возможно полное подавление корреляционньтх щумов в интервале записи в обоих примерах.
И1
На практике как при использовании биполярных, так и однополярных излучателей за счет нестабильности амплитуд возбуждаемых акустических импуль сов, а также за счет рассинхрониза- ции по времени возможно неполное подавление корреляционных шумов.
Проведенные исследования показали что чисто техническими средствами возможно достичь того, чтобы уровень остаточных корреляционных , связанных с суммарным эффектом амплитудных и временньк нестабильностей, не превышал 1-0% от уровня корреляцион- ных шумов согласно известному способу.
Таким образом, предлагаемый спосо акустического каротажа позволяет за счет подавления корреляционных шумов увеличить отношение сигнал/шум в результирующей записи не менее, чем на порядок, что, в свою очередь, обеспечивает расширение динамического диапазона регистрации не менее, чем на 20 дБ. Способ может быть реализован с помощью стандартных акустических зондов, содержащих магнитострикцион- ные излучатели.
Формула изобретения
Способ акустического каротажа, основанньш на непрерывном перемещении скважинного прибора и периодической посылке в исследуемую среду зондирую(Pus. f
) ;
0 5
0
1 2
щих сигналов в виде акустических импульсов, модулированных бинарной псевдослучайной периодической М-пос-, ледовательностью, корреляционной обработке принятых сигналов в пределах ее периода и включающий преобразование сигналов в последовательность импульсов, начальная фаза которых принимает значения О или Л в соответ- с кодом модулирующей М-после- довательности, отлича.ющий- что, с целью увеличения
с я тем,
отношения сигнал/шум путем подавления корреляционных шумов, зондирующие акустические импульсы модулируют в пределах не менее трех периодов М последовательности, затем через временной интервал, не меньший периода- М-последовательности, дополнительно возбуждают в исследуемой среде последовательность акустических импульсов с нулевой начальной фазой, при этом амплитуду импульсов выбирают равной амплитуде зондирующих сигналов, длительность последовательности выбирают равной не менее, чем двум периодам модулирующей М-последовательности, а частоту следования импульсов, равной частоте следования импульсов М-последовательности, преобразовывают принятые дополнительно возбужденные сигналы в цифровой код и суммируют их с результатом корреляционной обработки сигналов предшествующих посылок.
Ю -i
It
J
Г2 - iP- /l-Х/1- 1Л -пДФиг. г
I
r
в
Фа. V
Редактор А.Огар
Составитель Н„Гусева
Техред М.Дидш; Корректор С.Черни
Заказ 1358/53
Тираж 483
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-355, Раушская наб., д. 4/5
Подписное
| Ивакин Б.Н | |||
| и др | |||
| Акустический метод исследования скважин, М.: Недра, 1978, с | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| 1972 |
|
SU416651A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ акустического каротажа скважин | 1980 |
|
SU890320A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
