(54) СПОСОБ АКУСТИЧЕСКОГО КАРОТАЖА СКВАЖИН
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство акустического каротажа скважин | 1981 |
|
SU1000978A1 |
| Способ акустического каротажа | 1987 |
|
SU1469487A1 |
| СПОСОБ АКУСТИЧЕСКОГО КАРОТАЖА | 1990 |
|
RU2012018C1 |
| СПОСОБ АКУСТИЧЕСКОГО КАРОТАЖА | 1990 |
|
RU2012019C1 |
| Способ акустического каротажа иуСТРОйСТВО для ЕгО РЕАлизАции | 1979 |
|
SU828150A1 |
| ССР : ^. | 1971 |
|
SU295870A1 |
| Устройство для акустического каротажа скважин | 1977 |
|
SU750411A1 |
| СПОСОБ ВОЛНОВОГО АКУСТИЧЕСКОГО КАРОТАЖА | 2001 |
|
RU2178574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АКУСТИЧЕСКИХ ПАРАМЕТРОВ ГОРНЫХ ПОРОД | 2000 |
|
RU2178573C1 |
| Способ акустического каротажа | 1981 |
|
SU972444A1 |
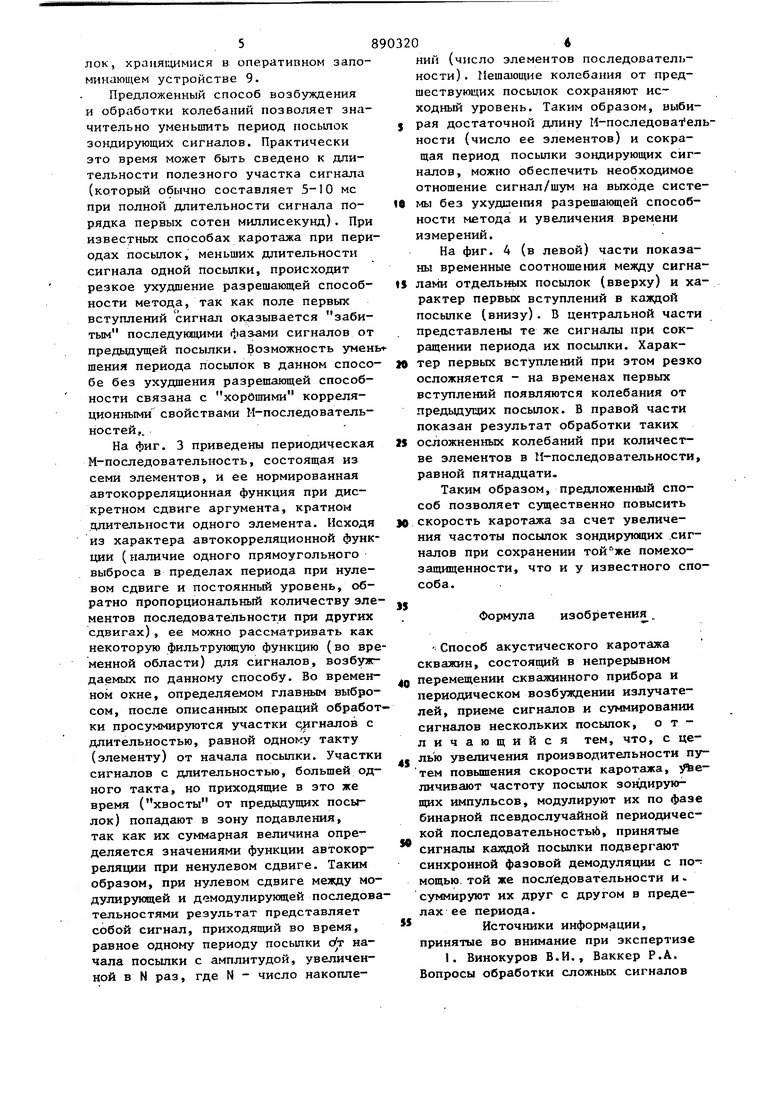
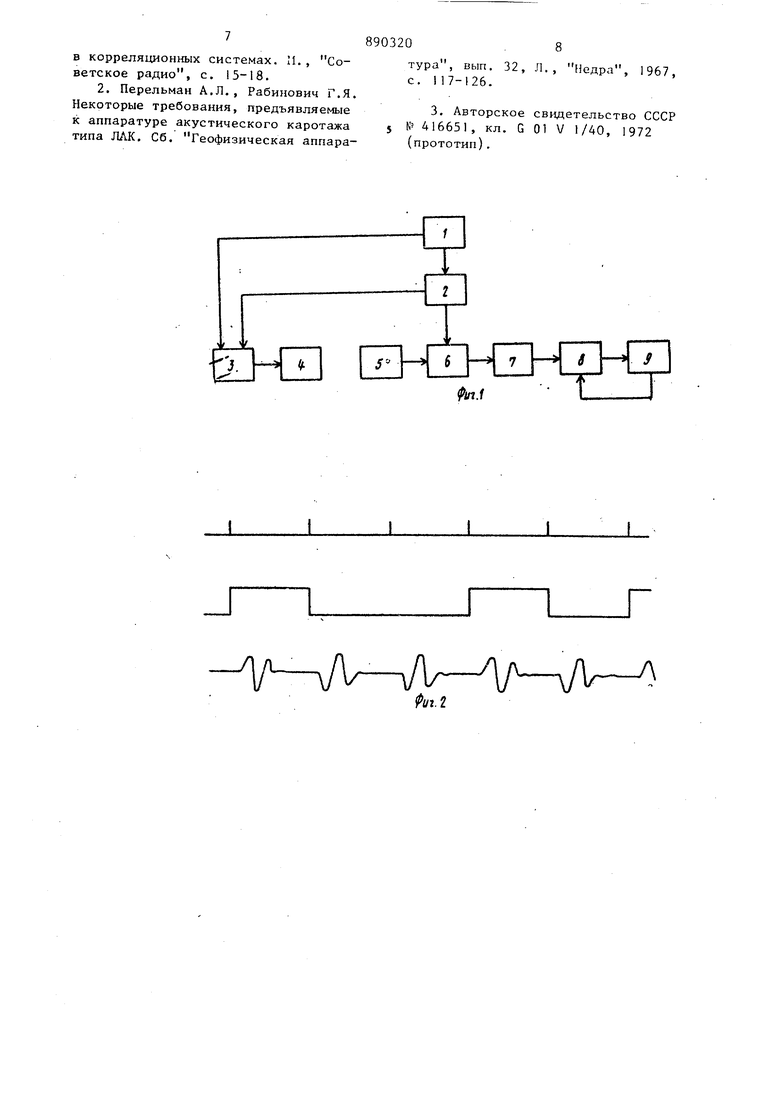
Изобретение относится к геофизическим методам разведки, в частности к акустическому каротажу. В задачах обнаружения цели, определения расстояния до нее, скорости объекта, скорости распространения сигналов в среде и т.п. используют различные методы вьщеления сигналов на фоне шумов или помех. В таких задачах широко применяются методы оптимальной или квазиоптимальной фильт рации, основанные, например, на корреляционной обработке принятых сигна лов при известной их форме или синхронном накоплении периодически повторяющихся сигналов при известном пе риоде их повторения. При корреляцион ном способе обнаружения используют различйые методы модуляции несущей для расширения спектра сигнала без уменьшения его длительности с целью обеспечения необходимой энергии сигнала в заданной полосе частот. Широкое применение при таком способе обработки получили фазоманипулированные сигналы, т.е. сигналы, несущая которых меняет фазу скачком HaJf DX В ряде задач, где форма зондирующих сигналов заранее неизвестна с достаточной точностью, а известен лишь период их повторения, применяется способ - синхронное накопление, при котором сигналы от нескольких посьток суммируют друг с другом. В акустическом каротаже форма излучаемых акустических импульсов зависит от акустической нагрузки, т.е. от параметров заскважинного пространства и сквазхины, и не может быть определена заранее. Поэтому в акустическом каротаже применяется преимущественно способ выделения сигналов синхронное накопление.. Одним из таких способов, широко применяющихся в акустическом каротаже, является накопление фаз сигналов на фотослое в функции глубины скважи3НЫ - регистрация по методу фазокорре пяционных диаграмм Г2. Однако накоплению на фотослое при сущ ряд специфических особенностей, ограничивающих эффективность накопления: ограниченный линейный участок фотометрической кривой, зависимость от режимов обработки фотоносителя, яркости и длительности импульсов засветки и т.п. Наиболее близким к предлагаемому является способ, основанный на сумми ровании сигналов, преобразованных в цифровой код с помощью арифметичес кого и оперативного запоминающего устройств, с последующей вьздачей сум марного сигнала на регистратор 13. Недостаток известного способа существенное снижение скорости каротажа при малых отношениях сигнал/шум на входе приемного тракта. Так как при малых входных отношениях сигнал/ шум число необходимых накоплений может оказаться большим, а период посьшки зондирующих сигналов ограничен длительностью полного пакета колебаний на входе приемника и не может быть сделан короче его, то общее вре 1-ш измерений также оказывается значи тельным, что в конечном итоге привод к снижению скорости каротажа и производительности метода. Цель изобретения - увеличение про изводительности каротажа путем повышения его скорости при высокой помехоз ащищенно с ти. Указанная цель достигается тем, что согласно способу акустического каротажа скважин, состоящему в непрерывном перемещении скважинного прибора и периодическом возбуждении излучателей, приеме сигналов и суммировании сигналов нескольких посьг лок, увеличивают частоту посылок зо дирзпощих импульсов, модулируют их по фазе периодической бинарной псевдослучайной последовательностью (М-последовательностью), а преобраз ванные сигналы каждой посылки подвергают фазовой синхронной демодуляции с помощью той же последовател ности и суммируют в пределах ее пер ода. На фиг. 1 изображена функциональ ная схема устройства акустического каротажа, реализующего данный способ; на фиг. 2 - сигналы на выходах тактового генератора, генератора бинарной М-последовательности и из0лучателя; )ia фиг. 3 - периодическая бинарная М-последонателыюсть и ее дискретная функция автокорреляции; на фиг. 4 - осциллограммы ре;шьньгх акустических сигналов, возбужденных и обработанных по данному способу. Устройство (фиг. I) содержит тактовый генератор 1, генератор бинарной периодической псевдослучайной последовательности 2, формирователь импульсов возбуждения излучателя 3, излучатель 4, приемник 5, демодулятор 6, аналого-цифровой преобразователь 7, суммирующее устройство 8, оперативное запоминающее устройство 9. Способ осуществляется следующим образом. Тактовый генератор 1 формирует непрерьюную последовательность импульсов, частота следования которых определяет частоту посылок зондирующих сигналов. Тактовые импульсы поступают на вход генератора 2, на выходе которого формируется напряжение периодической бинарной М-по ледовательности с длительностью одиночного элемента, равной периоду следования тактовых импульсов. Число элементов в периоде, равное (2 -1), задают, исходя из необходимого числа накоплений. Тактовые импульсы запуска и М-последовательность поступают на формирователь 3, который вырабатывает мощные электрические импульсы возбуждения излучателя 4 таким образом, чтобы фаза акустических импульсов на выходе изл чателя быпа промодулироваиа напряжением М-последовательности. На фиг. 2 внизу приведены сигналы на выходе излучателя. Начальная фаза акустических импульсов принимает два значения О или J в зависимости от уровня модулирующего напряжения последовательности. Конкретный вид формирователя 3 (фиг. 1) определяется типом применяемого излучателя. Акустические сигналы преобразовываются приемником 5 в электрические и подвергаются фазовой демодуляции в демодуляторе 6. В качестве опорного напряжения демодулятора используется то же напряжение М-последовательности. Дeмoдyлиf oвaнныe сигналы преобразуются в цифровой код преобразователем 7 и поступают в сумгиирующее устройство 8, где складывают ся с сигналами предшествующих посылок, хранящимися в оперативном запоминаюи1ем устройстве 9.
Предложенный способ возбуждения и обработки колебаний позволяет значительно уменьшить период посыпок зондирующих сигналов. Практически это время может быть сведено к длительности полезного участка сигнала (который обычно составляет 5-10 мс при полной длительности сигнала порядка первых сотен миллисекунд). При известных способах каротажа при периодах посылок, меньших длительности сигнала одной посьшки, происходит резкое ухудшение разрешающей способности метода, так как поле первых вступлений сигнал оказывается забитым последукщими фазами сигналов от предьщущей посылки. Возможность уменшения периода посылок в данном способе без ухудшения разрешающей способности связана с хорошими корреляционными свойствами М-последовательностей,.
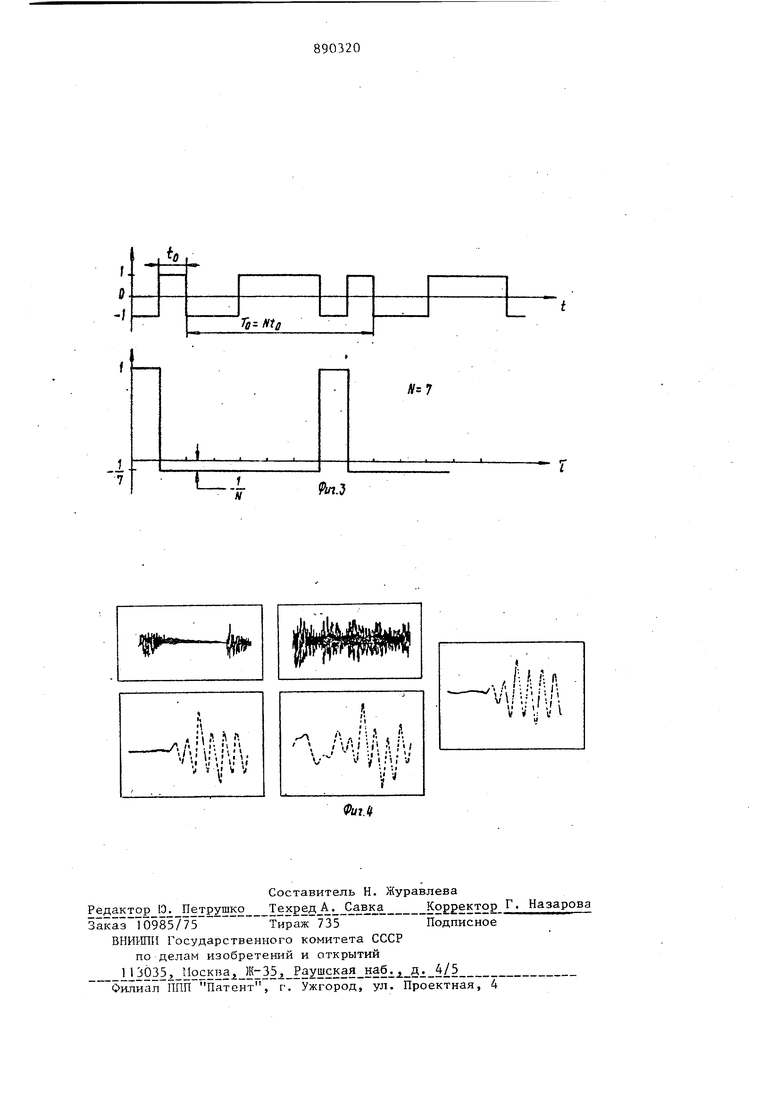
На фиг. 3 приведены периодическая М-последовательность, состоящая из семи элементов, и ее нормированная автокорреляционная функция при дис кретном сдвиге аргумента, кратном длительности одного элемента. Исходя из характера автокорреляционной функции (наличие одного прямоугольного выброса в пределах периода при нулевом сдвиге и постоянный уровень, обратно пропорциональный количеству элементов последовательности при других сдвигах), ее можно рассматривать как некоторую фильтрующую функцию (во временной области) для сигналов, возбуждаемых по данному способу. Во временном окне, определяемом главным выбросом, после описанных операций обработки просуммируются участки сигналов с длительностью, равной одному такту (элементу) от начала посьшки. Участки сигналов с длительностью, большей одного такта, но приходящие в это же время (хвосты от предыдущих посылок) попадают в зону подавления, так как их суммарная величина определяется значениями функции автокорреляции при ненулевом сдвиге. Таким образом, при нулевом сдвиге между модулирующей и демодулирующей последовательностями результат представляет собой сигнал, приходящий во время, равное одному периоду посыпки с/т начала посылки с амплитудой, увеличенной в N раз, где N - число накоплений (число элементов последовательности) . Мешающие колебания от предшествующих посылок сохраняют исходный уровень. Таким образом, выбирая достаточной длину М-последовательности (число ее элементов) и сокращая период посылки зондирующих сигналов, можно обеспечить необходимое отношение сигнал/шум на выходе системы без ухудиения разрешающей способности метода и увеличения времени измерений.
На фиг. 4 (в левой) части показаны временные соотношения между сигналами отдельных посылок (вверху) и характер первых вступлений в казвдой посылке (внизу). В центральной части представлены те же сигналы при сокращении периода их посылки. Характер первых вступлений при этом резко осложняется - на временах первых вступлений появляются колебания от предыдуЕ1их посыпок. В правой части показан результат обработки таких
осложненных колебаний при количестве элементов в Н-последовательности, равной пятнадцати.
Таким образом, предложенный способ позволяет существенно повысить
скорость каротажа за счет увеличения частоты посылок зондирующих .сигналов при сохранении помехозащищенности, что и у известного способа.
35
Формула изобретения.
- Способ акустического каротажа скважин, состоящий в непрерывном
перемещении скважинного прибора и периодическом возбуждении излучателей, приеме сигналов и суммировании сигналов нескольких посылок, отличающийся тем, что, с целью увеличения производительности путем повышения скорости каротажа, увеличивают частоту посылок зондирующих импульсов, модулируют их по фазе бинарной псевдослучайной периодической последовательность, принятые сигналы посылки подвергают синхронной фазовой демодуляции с помощью, той же последовательности и. суммируют их друг с другом в пределах ее периода.
Источники информации,
принятые во внимание при экспертизе
I. Винокуров В.И., Ваккер Р.А. Вопросы обработки сложных сигналов . С°ветское радио, с. 15-18. 2. Перельмаи А.Л., Рабинович Г.Я. Некоторые требования, предъявляемые к аппаратуре акустического каротажа типа ЛЛК. Сб. Геофизическая аппара- / -v / A- A-A/V
иг.2 903208 -ура, вып. 32. Л.. Недра. ,967. с. 117-126. 3. Авторское свидетельство СССР 3. Авторское свидетельство С( 5 416651. кл. G 01 V 1/40. 1972 . 1 t с 1 (прототип).
А
1
.3 н
Л i П/
-v, ; 1 ,.. Vv v
;Ь Д
. I I
