(54) БУКСИРОВОЧНЫЙ ДИНАМОМЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный преобразовательСилы B элЕКТРичЕСКий СигНАл | 1979 |
|
SU815526A2 |
| Датчик | 1978 |
|
SU794403A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ МОДЕЛЕЙ СУДОВ | 1969 |
|
SU251224A1 |
| Установка для испытания моделей судов | 1979 |
|
SU893676A1 |
| Устройство для измерения перемещений | 1978 |
|
SU1002812A1 |
| Преобразователь силы в электрический сигнал | 1976 |
|
SU661276A1 |
| Многокомпонентный стенд для измерения силомоментных нагрузок | 1984 |
|
SU1174795A1 |
| ДИНАМОМЕТР БУКСИРОВОЧНОЙ ТЕЛЕЖКИ | 1993 |
|
RU2104206C1 |
| ИЗМЕРИТЕЛЬНАЯ ГОЛОВКА | 1998 |
|
RU2140058C1 |
| Многокомпонентный стенд для измерения силомоментных нагрузок | 1989 |
|
SU1633296A1 |
f
Изобретение относится к информационно-измерительной технике, в частности к силоизмерительной технике, и может быть использовано для точного определения в широком диапазоне сред- 5 них значений буксировочного сопротивления при гидродинамических испытаниях моделей судов в опытовых бассейнах с помощью многопредельного.частотного силоизмерительного преобразова- Ю теля.
Известен буксировочный динамометр, предназначенный для измерения средних значений сил сопротивления воды движению модели в широком диапазоне 15 их изменения и содержащий частотный силоизмерительный преобразователь и экспериментальную установку, содери ащую качалку, ведущий пилон, ферму буксирующего устройства, пружины, 20 обеспечивающие перепачу изменяемого усилия от испытываемой модели судна к силоизмерительному преобразователю 1 .
Динамометр обладает погрешностями,25 связанными с влиянием значительных периодических помех вибрационного характера, обусловленных в основном неравномерным движением буксировочной тележки по рельсовому пути, а также 30
погрещностями гидродинамического характера, вызванными влиянием неизмеряемых сил и моментов, зависящих от размещения силоизмерительного преобразователя и его связей с качалкой и фермой буксирующего устройства, а также погрешностями частотных силоизмерительных преобразователей.
Наиболее близким по технической сущности к предлагаемому является буксировочныйЧдинамометр, содержащий качалку, связанную с помощью упругих шарниров и демпфера с фермой, тягу, частотный силоизмерительный преобразователь, выполненный в виде рамного упругого элемента с двумя днфференциальньми индуктивными частотными преобразователями, катушки индуктивности, сердечники которых и якоря расположены на рамном упругом элементе, снабженном гибкой перемычкой, и основной блок вычитания частот 2}.
К недостаткам известного динамометра относится низкая точность измерения усилий.
Цель изобретения - повышение точности измерения усилий.
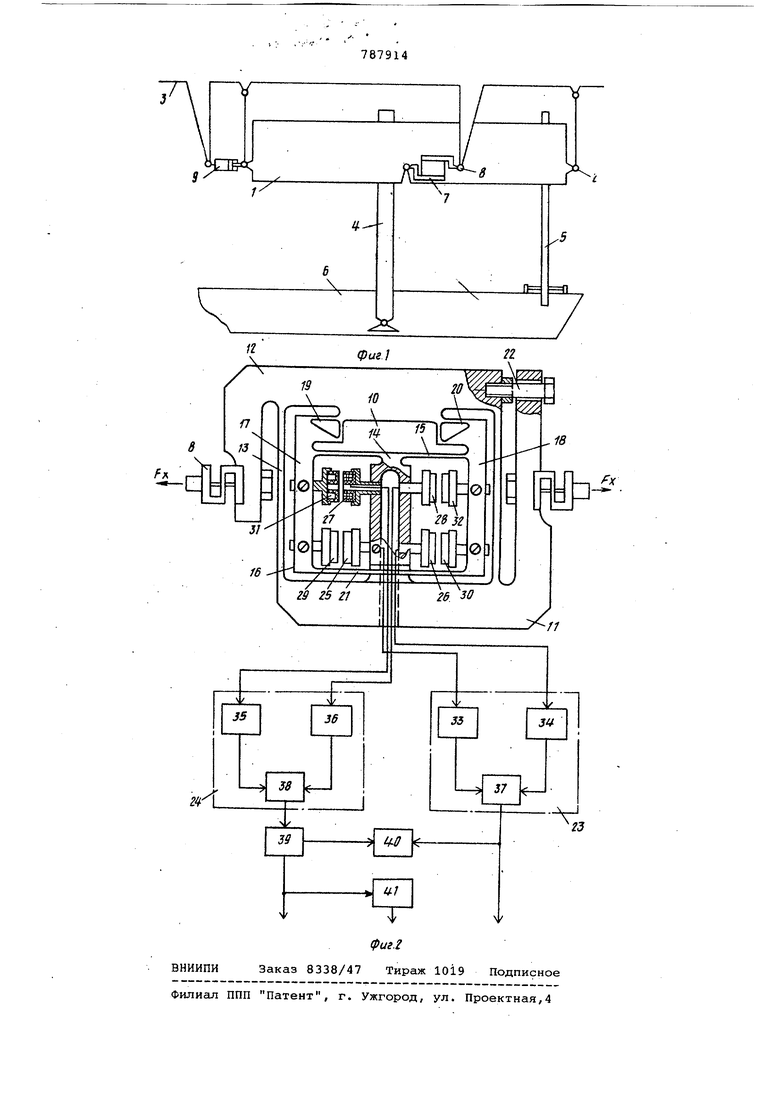
Указанная цель достигается тем, что в него введены крестообразные шарниры, первый и второй делитель частоты, дополнительный блок вычитания частот, а частотный силоизмерительный преобразователь выполнен в виде первого и второго ригеля, связанных .упругими белочками, жесткого отростка, расположенного-на первом ригеле, хрдЬувеличителя с двумя рычагами, связанрыми со вторым ригелем через . упругие шарниры, а между собой, с отростком и с первым ригелем ходоувеличители связаны через гибкую перемычку причем частотный силоизмерительный преобразователь связан с качалкой и фермой крестообразными шарнирами, центры поворота которых расположены на одной оси с осью демпфера, и упру гими шарнирами, при этом якоря катушек индуктивности каждого дифференциального преобразователя расположены на рычагах кодоувели чителя, а центры поворота упругих шарниров совмещены с осями воздушных зазоров индуктивных частотных преобразователей, один выход дополнительного блока вычитания частот через первый делител частоты подключен к выходу первого дифференциального индуктивного частот ного преобразователя, якоря которого расположены на рычагах ходоувеличйте.ля вблизи их свободных концов, а вход непосредственно соединен с выходом другого преобразователя, якоря которого размещены на рычагах ходоувеличи теля между гибкой перемычкой и якорями первого преобразователя, при этом на выходе дополнительного блока вычитания частот включен второй делитель частоты. На фиг. 1 представлена схема предлагаемого буксировочного динамометра на фиг. 2 - конструкция и структурна схема электрической части частотного силоизмерительного преобразователя. Буксировочный динамометр содержит качалку 1, подвешенную на упругих шарнирах 2 и ферме 3, ведущий и напр ляющий пилоны 4 и 5, установленные на качалке 1 и соединенные с моделью 6, частотный силоизмерительный преоб разователь 7, связанный с качалкой 1 и фермой 3 крестообразными шарнирами 8, демпфер 9, установленный между качалкой 1 и фермой 3. Частотный силоизмерительный преоб разователь 7 содержит рамный упругий элемент 10, включающий первый и второй.ригели 11 и 12, связанные упругими балочками 13, на первом ригеле 11 имеется жесткий отросток 14, гибк в направлениях действия неизмаряемых сил перемычку 15; ходоувеличитель 16 с двумя рычагами 17 и 18, связанными со вторым ригелем 12 чере упругие шарниры19 и 20 рычагов дополнительную перемычку 21 ограничитель 22 перемещения рамного упругого элемента; первый и второй дифференциальные индуктивные частотные преобразователи 23 и 24, включающие катушки 25-28 индуктивности с сердечниками, расположенные на отростке 14 первого ригеля 11, и якоря 29-32 катушек индуктивности, размещенные на рычагах 17 и 18, а также дифференциально управляемые генераторы 33-36, в контуры которых включены катушки 25-28 индуктивности и два блока 37 и 38 вычитания частот; дополнительный блок 39 вычитания частот, первый делитель 40 частоты и второй делитель 4Г частоты. Центры поворота крестообразных шарниров 8 расположены на одной оси с осью демпфера 9 и упругими шарнирами 2. Рычаги 17 и 18 соединены между собойчи отросток 14 .с первым ригелем Г1 гибкой перемычкой 15, а свободные концы рычагов жестко связаны между собой дополнительной перемычкой 21. Центры поворота упругих шарниров 19, 20 совмещены с осями воздушных зазоров магнитных систем, включающих якори 29-32 и сердечники катушек 25-28 индуктивности. Катушки 25 и 26 индуктивности включены в контуры управляемых генераторов 33 и 34 первого дифференциального преобразователя 23 младшего поддиапазона измерения, а их якори 29 и 30 расположены на рычагах 17 и 18 вблизи их свободных концов, жестко соединенных дополнительной перемычкой 21. Катушки 27 и 28 индуктивности включейы в контуры управляемых генераторов 35 и 36 второго дифференциального преобразователя 24, а их якори 31 и 32 размещены на рычагах 17 и 18 между гибкой перемычкой 15 и якоряйи 29 и 30 первого преобразователя 23. Все четыре катушки 25-28 выполнены на основе однотипных броневых ферритовых сердечников. В исходном состоянии начальные зазоры магнитных систем катушек 25-28 индуктивности разных дифференциальных преобразователей 23 и 24 в общем случае могут быть выбраны различными. Буксировочный динамометр функционирует следующим образом. Измеряемая гидродинамическая сила F действующая на буксируемую модель, б., передается через ведущий .пилон 4 и качалку 1 на частотный силоизмерительный преобразователь 7. Перемещение качалки совпадает с направлением действия измеряемой силы и определяется, главным образом, жесткостью рамного упругого элемента силоизмерительного преобразователя. Под дейст,вием измеряемой гидродинамической силы F происходит йаремеиение второго ригеля 12 относительно первого ригеля 11. Амплитуда пульсации перемещения, в частном случае гармонической, обус:ловленная, в основном/ вибрацией конструкции буксирующего устройства/ а также влиянием пульсирующихгидродинамических сил, снижается демпфером 9. В результате воздействия измеряемой FX и пульсирующих неизмеряемых сил второй ригель 12 относительно пе вого ригеля11 будет перемещаться одновреме-кно с ним, но на большие ве личины, с учетом отношений плечей рычагов 17 и 18 будут перемещаться соответственно якоря 29-32 относител но сердечников катушек индуктивности 25-28, причем перемещение якорей 29 и 30 дифференциального преобразов теля 23 определяется коэффициентом передачи рычагов 17 и 18, а перемеще ние якорей 31 и 32 дифференциального преобразователя 24 определяется коэф фициентом передачи тех же рычагов. В каждом дифференциальном индуктивном частотном преобразователе (например 23) зазор в магнитной системе одной катушки (25) уменьшается, а в другой катушке (26) - увеличивается, что, в свою очередь, приводит к изменению частот управляемых генераторов 33-36 Выходные напряжения управляемых гене раторов, включенных дифференциально, поступают на входы блоков 37 и 38 вычитания частот, на выходе которых выделяются сигналы разностных ча.стот Разностная частота с выхода дифференциального преобразователя 23 используется как выходной информативный параметр нижнего (младшего) поддиапазона. Кроме того, разностная частота после деления на коэффициент дискретным делителем 40 поступает на вход дополнительного блока 39 вычитания частот и используется для повышения линейности характеристики второ го дифференциального преобразователя 24 путем смешивания частот и выделения на выходе блока 39 разности частот, принимаемой за выходной информативный параметр второго (более стар шего) поддиапазона измерения.Эта частота пропорциональна измеряемому усилию. Верхний поддиапазон измерения получается с помощью второго делителя 41 частоты. Формула изобретения Буксировочный динамометр, содержащий качалку, связанную с помощью упругих шарниров и демпфера с фермой, частотный силоизмерительный преобразователь, выполненный в виде рамного упругого элемента с двумя дифференциальными индуктивными частотными преобразователями, катушки индуктивности, сердечники которых и якоря расположены на рамном упругом элементе, снабжен.ном гибкой перемычкой, и два блока вычитания частот, о тличающийся тем, что, с целью повышения точности измерения усилий, в него введены крестообразные шарниры, первый и второй делитель частоты, дополнительный блок вычитания частот, а частотный силоизмерительный преобразователь выполнен в виде первого .и второго ригеля, связанных упругими балочками, жесткого отростка, расположенного на первом ригеле, ходоувеличителя с двумя рычагами, связанными со вторым ригелем через упругие шарниры, а между собой с отростком и с первым ригелем ходоувеличители связаны через гибкую перемычку , причем частотный силоизмерительный преобразователь связан с качалкой и фермой крестообразными шарнирами, центры поворота которых расположены на одной оси с осью демпфера,и упругими шарнирами,при этом якоря катушек индуктивности казкдого дифференциального преобразователя расположены на рычагах ходоувеличителя, а центры поворота упругих шарниров совмещены с осями воздушных зазоров индуктивных частотных преоо-. разователей, один выход дополнительного блока вычитания частот через первый делитель частоты подключен к выходу первого дифференциального индуктивного частотного преобразователя, якоря которого расположены на рычагах ходоувеличителя вблизи их свободных концов, а вход непосредственно соединен с выходом другого преобразователя, якоря которого размещены на рычагах ходоувеличителя между гибкой перемычкой и якорями первого преобразователя, при этом на выходе дополнительного блока вычитания частот включен второй делитель частоты. Источники информации, принятые во взимание при экспертизе 1.Эткин Л. Г. Вибрационно-частотые преобразователи, ч. 2. М., Энергия; 1970, с. 75-96. 2.Авторское свидетельство СССР 4.218Ч1, кл. G 01 L 1/04, 12.12.74 (прототип).
