1Изобретение .относится к информациоКно-измерительной технике, может найти широкое применение при точном непрерывном измерении усредненных, значений изменяющихся во времени неэпектрйчески.х, а также электрических величин, с Помощью частотных датчиков, прекму- шественно на основе LС -генераторов с управляемой индуктивностью ипи с использованием варикапов, в цифровых приборах и информационно-измерительных системах (ИИС) с большим числом кон тролйруемых параметров. В частностк, оно может широко использоваться длй точного измерения сил и давлений в специфических условиях гидравлических лабораторий при величине пульсирующей помехи (например, потока жидкости), сравнимой с постоянной составляющей измеряемой величины.
Известные частотные датчики характеризуются погрешностью нуля и чувствительности от нестабильности частоты
генератора и имеют существенно нелинейную характеристику преобразования при достаточно широком относительном изменении входов параметра.
Нелинейность характеристики не позволяет . использовать для измерения частоты датчика промышленные частотомеры, а в ИИС при наличии нескольких кайалоБ не позволяет производить непосредственно на выходе датчика сложе10ние, вычитание частот от разных датчиков, усложняя последующую обработку информации и загружая память специали-. зированной вычислительной машины.
15
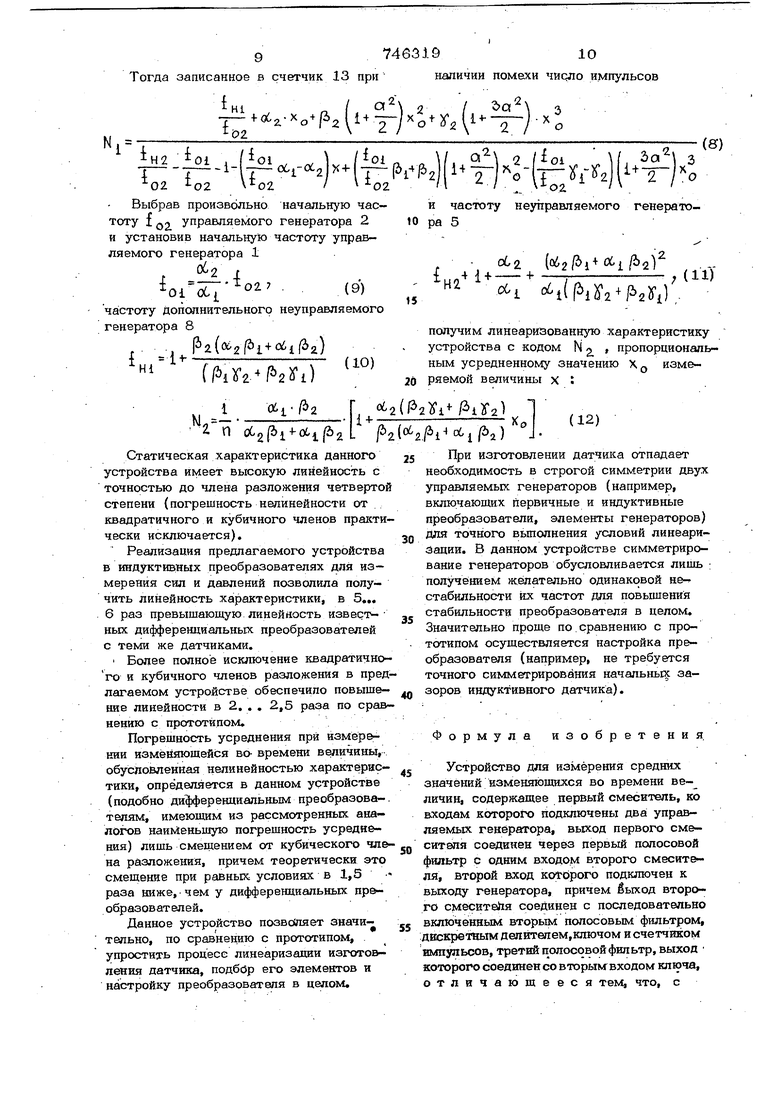
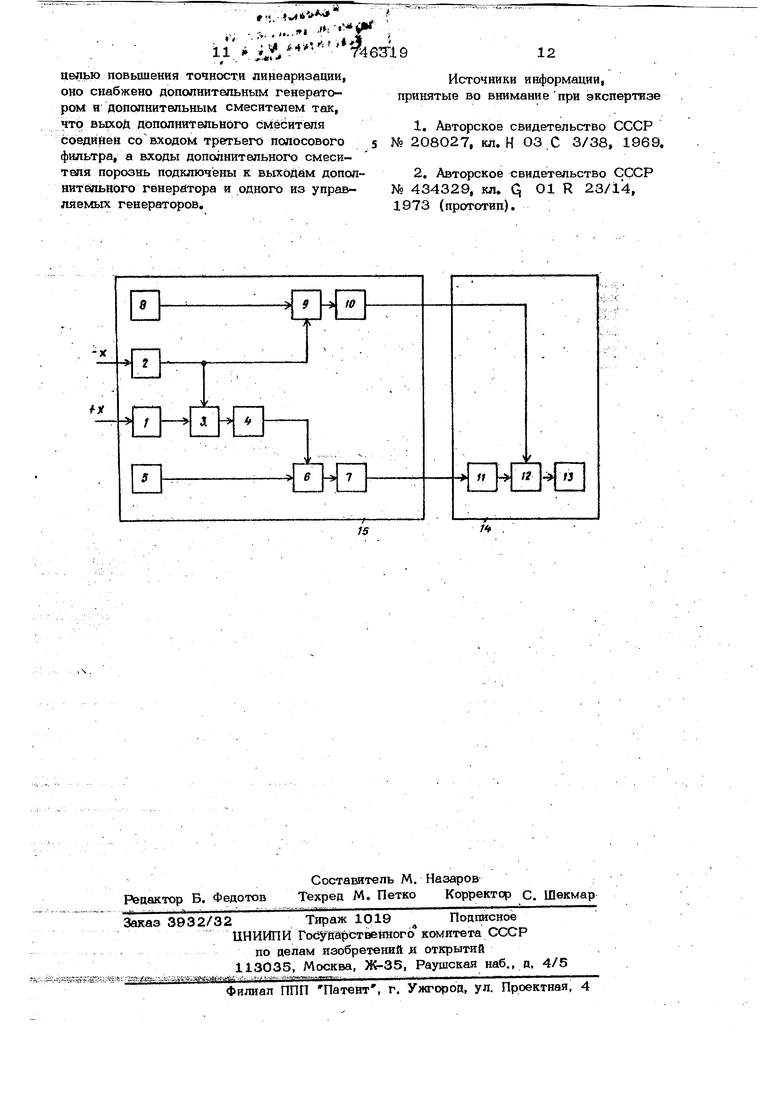
Погрешности от нелинейности характеристики, нестабильности частоты явля1Лся взаимосвязанными параметрами частагньк датчиков и в конечном счеае опредблякл- диапазон измерения уст20ройства. Уменьшение нелинейности при заданной погрёшносли линейности позволяет снизить погрешность от нестабильности, а уменьшение обоих погрешно 3 7 стей позволяет расширить диапазон измерения. Кроме того, при измерении усредненных значений изменяющихся во времени величин {в частности постоянных величин с наложенной на пих гармонической помехой) возникает погрешность усреднения. Одна из составляющих погрешности усреднения - динамическая погрешность второго рода (погрешность отсечки), связанная с некратностью времени измерения и периода помехи, может быть устранена различными способами, например, при известных параметрах помехи иетегрированиемсо сдвигом на полпериода помехи или частоты управляемых генераторов (датчиков) частотной помехи, а тпри иЗвеСтньгх пара-метрах пом&хи наиболее просто - выбором времени интегрирования, много большим максимальйого периЪда помехи ййИ интегрированием со .сдвигом и т, д. Вторая составляющая погрешности усреднения определяется нелинейностью Характеристики частотного датчика- . наличием квадратичного и кубичного ше нов разложения в ряд ха 1йктеристйкй , (1-юбх-рхЧ х), , ;: где X - измеряемая величшш f ц И ig частота на выходе датчика и начальная частота при ХО; oC,/S, - постоянные ко эффициенты, что при интегрировании измеря мойвеличтоы даже за интервал времени,кра ный периоду помехи, приводит к смещению усрэднеинохю значения из-за добавок от квадратичного и кубичного членов, пропорционапьных квадрату амплитуды переменной составляющей измеряемой ны (помехи). Известны устройства для измерения перехода амплитудной модуляции в частотную или фйзовую в ограНИчИтелях содержащие два неуправляемых генератора, частоты которых ,соответственно ВЫШ6 и измеряемой, в которых обеспечивается вычисление разностных частот для анализа отклонения разностибй частоты от номинала l. Однако в этих устройствах HeBosMolkно осуществить линеаризацию характеристики устройства и коррекцию мультипликативной составляющей систематической погрешности от нестабильности частот генераторов,, Наиболее близкок предлагаемойсг устройство для измерения средних знаЧйний изменяющихся во времени-, величин, в котором возможно обеспечить стабильность харшстеристик и высокую их линейность путем исключения квадратичного и кубичного шенов разложения, а также получить более высокое, по сравнению с дифференциальными преобразователями, уменьшение погрешности усреднения из-за нелинейности характеристики при непрерьюном процессе измерения контролируемого параметра,. Данное устройство содержит два симметричных инверсно управляемых изм&ряемой величийой генератора (включенных дифференциально), подключенные ко входам одного смесителя, другой смеситель и неуправляемый генератор, подключенный к одному из входов второго смесителя, другой вход которого через полосовой фильтр связан с выходом первого смесителя, счетчик импульсов, на входе которого установлено ключевое устройство, из входов которого через полосовой фильтр и дискретный делитель частоты связан с выходом второго смесителя, а на другом входе уствгновлен фильтр нижних частот, через который этот вход связан с выходом.первого смедитедя 2 Недостй1рки устройства: 1) Необходимость создания строго симметричных дифференциальных преобразователей (управляемьк измеряемой величиной генераторов) с идентичными коэффициентамкс :| с«:2) 2 BpejvieHHo при трех членах разложения с первой, второй и третьей степенями, и равными нач.апькыми частотами f(jj -„ д осуществления процесса линеаризации . , и исключения как квадратичного, так и кубичного чиенов разложения. 2) Невозможность на практике с высокой точностью симметрировать управляв- мые генераторы; и вытекающие отсюда значительное усложнение настройки датчиков, требующих сложной шдивидеальной подгонки для удовлетворения максимально возможной симметрии, -появление высокой остаточной погрешности нелинейности лост ° квадратичного, так. и от кубичного членов разложения, при неравенстве коэффициентов oSj (xS 2 при линейных членах, а также неравенстве . начальных частот I Igj о2 Двух управляемых генераторов. . ,. . 3) Принципиальная невозможность разнесения начальных частот управляемых генераторов, приводящая к захвату частот и искажающая .характеристику преобразования. Это затрудняет практическое примене ние данного устройства, делает его непригодным для серийного производства и существенно снижает эффективность ка линеаризации сгатической характеристики так и уменьшения погрешности усреднения изменяющейся во времени величины при непрерывном ее интегрировании в цикле измерения. , Цель изобретения - повышение точнос ти линеаризации. Указанная цель достигается тем, что в устройство для измерения средних зна чений изменяющихся во времени величии содержащее первый смеситель, ко входам которого подключены два управляемых генератора, выход первого смесителя соединен через первый полосовой фильтр с одним входом второго смесителя, рторойаход которого подключен к выходу генератора, причем выход второго смесителя соединен с последовательно вклк ченным вторым полосовым фильтром, дискретным делителем, ключом и счетчиком импульсов, третий полосовой фильтр, вьссод которого соединен со вторым аходом ключа, снабжено дополнитальнь1М генератором и смесителем, так что выход дополнительного смесителя соединен со входом третьего полосового фильтра, а входы Дополнительного смесителя порознь подключены к выходам дополнительного генератора и одного из управляемых генераторов. Введение дополнительного смесителя, формирующего, в отличие от прототипа, иную заполняющую частоту, путем смещивания частоты дополнительного нбуправляемого генератора и частоты одного из управляемых генераторов, подключаннык к его входу, которая заполняет счетчик импульсов в течение измерителеного интервала времени, сформированно-го аналогично прототипу, позволяет обеспечить условие линеаризации статической характеристики (при полном исключении квадратичного и кубичного членов разложения) и уменьшить, по сравнению с дифференциальным методом, погрешность усреднения даже при различных начальных частотах управляемых генераторов и различных произвольных их коэффициентах разложения (c ii of-2 fti P2 Si 2. о оа ) допускает разнесение начальных чартот управляемых rsHepafoров, исключая их захватывание. Введение дополнительного неуправляемого генератора, подключенного ко входу дополнительного смесителя, позволяет обеспечить точное выполнение условия линеаризации путем подстройки его частоты при произво)1ьной начальной частоте управляемого генератора, подключенного вместе с ним к дополнительному смесителю, и произвольных коэффициентах разложения. Все это существенно повьщ1ает эффективность линеаризации статической характеристики и эффективность усреднения изме1няющейся во времени величины при непрерывном ее измерении и значительно упрощает изготовление и настройку устройства, делая его пригодным для серийно1 о производства. На чертеже приведена структурная электрическая схема предлагаемого уст ройства. Схема состоит из управляемого измеряемой величиной генератора 1 и инверсно управляемого генератора 2, подключенных к смесителю 3, полосового фильт ра 4, неуправляемого генератора 5, второго смесителя 6 и второго полосового фильтра 7, дополнительного неуправляемого генератора 8, дополнительного смесителя 9, фильтра нижних частот 10, дискретного делителя 11, ключа 12 и счетчика импульсов 13. Последние три узла Ъбразуют отдельный блок 14 - измеритель отношения двух частот, в качестве которого может быть использован промьшшенный частотомер или многофункциональный частотомер ИИС. Остальные узлы конструктивно объединены и образуют частотный дат Ик 15, выходные частотные сигналы коорогопо линиям связи передаются к локу 14. Устройство работает следующим обр&Ш. Под действием изменяющейся во врем&и измеряемой величины х частота колеаний i J управляемого генератора 1 величивается, а .частота f2 генератора уменьшается в соответствии с выраже-. иями x-/2,), (i) ( {(l-OtjX ) ei. f 021 начальные частоты генераров 102 при ,o(.i , /5j , tOCg, 2 безразмерные козсйнциенты величина которых зависит от типа и кон структивных особетюстей датчика. Выходные напряжения управляемых, генераторов 1 и 2 поступают на входы смесителя 3, а. одного иа управляемых генераторов.- генератора 2 и дополнительного неуправляемого генератора 8
f
Hi
+ , 7
(3) 8 частотой f |Ц - на входы дополнительного смесителя 9. Полосовой фильтр 4 и фильтр нижних частот 10 выделяют на выходах смесителя 3 и дополнитеяьного смесителя 9 сигналы с частотами, равными соответственно сумме Ir-ii 2 и разности Д f |.) i - i 2 частот гене- с раторов, причем


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения неэлектрических величин | 1977 |
|
SU781577A1 |
| Частотный датчик | 1977 |
|
SU765743A1 |
| Измерительный преобразовательСилы B элЕКТРичЕСКий СигНАл | 1979 |
|
SU815526A2 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ДВУХЧАСТОТНОМ НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2016 |
|
RU2621319C1 |
| Устройство для измерения перемещений | 1978 |
|
SU1002812A1 |
| Устройство для получения попарных произведений нескольких сигналов | 1978 |
|
SU767781A1 |
| Газоанализатор с время-импульсным выходным сигналом | 1978 |
|
SU687921A1 |
| Способ косвенного измерения при помощи дифференциального датчика и устройство для его реализации | 2018 |
|
RU2675405C1 |
| Устройство для измерения неэлектрических величин | 1980 |
|
SU930010A1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ОБНАРУЖЕНИЯ ПОДСЛУШИВАЮЩИХ УСТРОЙСТВ | 2007 |
|
RU2327185C1 |
( 1 ог 02 Далее разностная частота Д f поступает на один из входов ключа 12 и . используется как частота, заполняющая счетчик импульсов 13, Суммарная частота i используется для формирования измерительного интервала времени Т , фушшиот.чшьно связанного с измеряемой величиной X , и поступает на.один из входов второго смесителя 6, где смешивается с частотой f |-J2 K f 02 генера тора 5, поступающей на другой вход см f , fe P°4fo2 f При измерейий среднего ЗИМения . пульсирующей по гармоническому auKOiiy величины x,-K.,i+a5in.(c 3t+cp) ( и характеризует отпошени амплитуды X in помахи частотой СО и начальной фазой ф к постоянному значению Хд измеряемой величины) среднее значение разности частот i р на выходе дискретного делителя 11
К) 7 сителя (К - некоторый коэффициент, выбираемый из условия линеаризации). Разность частот p -fjj2 f(, вьщвляется вторым полосовым фкльтрОМ 7 и непос- рёдственно используется для формирования измерительного интервала времени T,j п Тр путем делешш ее на коэффициент П дискретным делителем 11 ( Тр - усредненный делителем период разности частот Хр ) и подачи -сигнала на второй вход ключа 12, Выражение для разностной частоты записывается в виде - .. , У -Г Х и 62/ . определяется равенством Fp подставляя в которое значение ± „ из (5) и интегрируя при условии кратности интерпалаусреднения периоду Помехи, т. е. 6 - целом (что исключает из рассмотрения влияние первой составляющей погрещности усреднения - погрещ носТи отсечки) получим
f
1 -7/Uo2./ IQJ,
Вычисленное аналогичным путем среднее значею1е разностей частоты Др , получаемое в счетчике импульсов 13,
f
tuin 20- iV
ui i
L -rt7
:при условии кратности измерительного интервала времени Т периоду помехи.-; Т , записывается в виде
(7) 9 Тогда записанное в счетчик 13 -HI/ - -,-fo6.x./2,Jl4-1 ( / 1н2 i loiI c6,-ocJx r 01 02 io2 0-7 02/ Выбрав произвольно начальную частоту i. Q2 управляемого генератора 2 и установив начальную частоту управляемого генератора 1 Oi OCi 4aicTOTy дополнительного неуправляемого генератора 8 ,. 2( (21+0 1(2) i.,, .. ч (10) ( СЗС2( L Статическая характеристика данного устройства имеет высокую линейность с точностью до члена разложения четвертой степени {погрешность нелинейности от квадратичного и кубичного членов практи чески исключается). Реализация предлагаемого устройства в индуктивных преобразователях для измерения сил и давлений позволила получить линейность характеристики, в 5,,. . 6 раз превышающую линейность извес- - ных дифференциальных преобразователей с теми же датчиками. Более полное исключение квадратичного и кубичного членов разложения в пред лагаемом устройстве обеспечило повышение линейности в 2. . , 2,5 раза по срав нению с прототипом. Погрешность усреднения при измерении измён$пощейся во- времени величины, обусловленная нелинейностью характеристики, определяется в данном устройстве (подобно ди еренциальным преобразоватеяям, имеющим из рассмотренных аналогов наименьшую погрешность усреднения) лишь смещением от кубического чле на разложения, причем теоретически это смещение при равных условиях в 1,5 раза ниже,-чем у дифференциешьных преобразователей. Данное устройство позволяет значительно, по сравнению с прототипом, упростить процесс линеаризации изготовления датчика, подбор его элементов и настройку преобразователя в целом. 06 74631910 приналичии помахи число импульсов 2/ Q (14-- . / a о ftoiч 0 ,.|5J l4 k - y-Kjb-2 /I /VlrtO и частоту неуправляемого генерато10 ра 5 - oC2 {ai2/ i oti/2 2) , .,iuo- i + -+ -TT-- ; (11) i (Pllf2 122Xi, ,5 получим линеаризованную характеристику устройства с кодом N 2 , пропорциональным усредненному значению XQ иэмеЗО ряемой величины х : 1 /21У2) . /2)2 ) При изготовлении датчика отпадает необходимость в строгой симметрии двух управляемых генераторов (например, включающих первичные и индуктивные преобразователи, элементы генераторов) для точного вьшолнения условий линеаризации. В данном устройстве симметрирование генераторов обусловливается лишь ; получе нием желательно одинаковой нестабильности их частот для повьпиения стабильности преобразователя в целом. Значительно проще по.сравнению с прототипом осуществляется настройка преобразователя (например, не требуется точного симметрирования начальных зазоров индуктивного датчика). Формула изобретения. Устройство для измерения средних значений изменяюши-хся во времени ве- личин, содержащее первый смеситель, ко входам которого подключены два; управляемых генератора, выход первого смесителя соединен через первый полосовой фильтр с одним входом второго смесителя, второй вход которого подключен к выходу генератора, причем выход второго смесителя соединен с последовательно включенным вторым полосовым фильтром, дискретным депйтепем,ключом и счетчиком импульсов, третий полосовой фильтр, выход которого соединен со вторым входом ключа, отличающееся тем, что, с ... .,. -,;v..-.-- , . 11.,. %в3 целью повышения точности линеаризации, оно снабжено дополнительным генератором и дополнительным смесителем так, что выкоД дополнйтельйбгчэ сл4еЬителя соединен со входом третьего полосового фильтра, а входы дополнительного смеситепя порознь подключены к выхоДйм дополнительного генератора и одного из управляемых генераторов. 5 19 Источники информации, принятые во вниманиепри экспертизе 1.Авторское свидетельство СССР № 208027, кл. Н ОЗ С 3/38, 1969. 2.Авторское свидетельство СССР № 434329, кл, q О1 R 23/14, 1973 (прототип).
