Изобретение относится к системам автоматического контроля и регулирования и может быть использовано для контроля резервированных систем автоматического управления.
По основному авт. св. № 376661 известно устройство для контроля датчиков угловых перемещений, содержащее преобразователи, к входам которых подключены контролируемые датчики, а к выходам - нагрузочные резисторы, соединенные с логическими элементами И, компараторы, нагрузочные резисторы соединены по схеме звезды, концы которой соединены с входами компараторов, выходы которых подключены к входам логических элементов И 1 .
Недостатком устройства является недостаточная достоверность выходных сигналов, так как устройство не обладает избирательностью к нарушениям качества сигналов контролируемых датчиков.
Целью изобретения является повьше- ние достоверности результатов ко троля.
Поставленная цель достигается тем, что в устройство, содержащее преобразователи, к входам которых подключены контролируемые датчики, а к выходам - нагрузочные резисторы, соединенные с логическими элементами И, компараторы, нагрузочные резисторы соединены по схеме звезда, концы которой соединены с входами компараторов, выходы которых подключены к входам логических элементов
10 И, введены генератор импульсов, дискриминатор перерыва, триггер-защелка (J триггер), формирователь времени блокировки, элемент ИЛИ и схема блокировки, причем выходы элементов И соединены
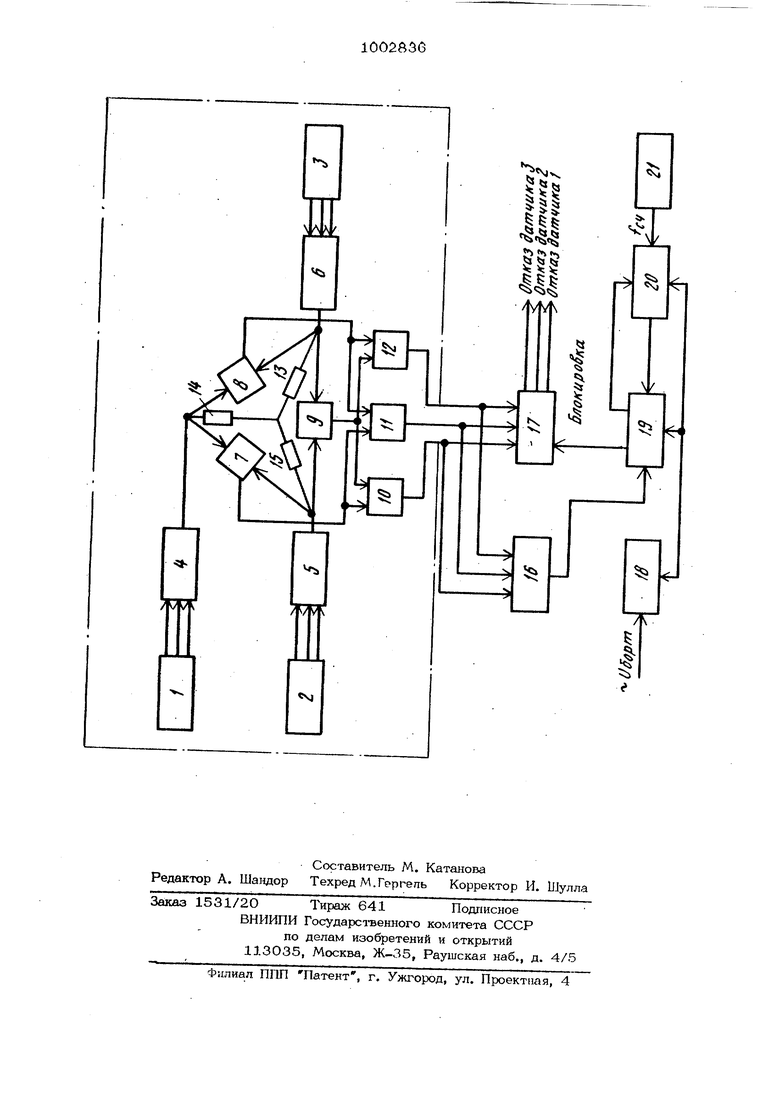
15 с входами схемы блокировки и элемента ИЛИ, выход которого соединен с входом триггера-защелки, второй вход которого соедине} с входом формирователя време2Q ни блокировки и выходе 1 дискриминатора . перерьша, вход которое о cooaimeH с входной клеммой питающего напряжения, выход генератора импульсов соединен с вторым входом формирователя времени блокировки, третий вход которого соедипен с выходом трипера-оащелки, а выход - с третьим входом триггера-защелк второй выход которого соединен с четвер тым входом схемы блокировки, выходы которой соединены с выходными клеммам сигналов отказа. На чертеже приведена блок-схема пре ложенного устройства. Устройство содержит датчики 1-3 угловых перемещений, преобразователи 4-6 компараторы 7-9, элементы И 1О-12, нагрузочные резисторы 13-15, элемент ИЛИ 16, схему 17 блокировки, дискрими натор 18 перерыва, триггер-защелку 19, формирователь 20 времени блокировки. Генератор 21 импульсов. Датчики 1-3 угловых перемещений соединены с преобразователями 4-6, выходные резисторы 13-15 которых соединены звездой. Между концами этой звезды подключе ны компараторы 7-9, выходы которых попарно соед1шены с элементами И 1О- 12. Одновременно концы этой звезды соединены с элементом ИЛИ 16 и со схемой 17 блокировки, вход дискршиинатора 18 перерьгоа подключен к источнику опорного напряжения (бортсети), а выход как и выход логического элемента ИЛИ 16 подключен к входу установки нуля триггера-защелки 19, выход которого подключен к запрещающему входу схемы 17 блокировки и к разрешающему входу формирователя 20 времени блокировки, а к счетному входу последнего подключен генератор 21 импульсов. Устройство работает следующим образом. При синхронной работе датчиков выходные напряжения преобразователей рав ны между собой, следовательно, равны и фазные напряже1шя звезды и, следовательно, на входах всех компараторов линейные напряжения также . равны между собой. Поэтому все компараторы находят ся в cocTosfflHTi О (низкий уровень), Компараторы сработают, если разност напряжения на их входах больше 0 : - напряжение на одном входе; UgXi - напряжение на другом входе; у опорное напряжение, одинако вое для всех компараторов; определяет порог (чувствительность) устройства. Выходное напряжение сработавших компараторов (высокий уровень) примем за логическую 1. При несинхронной работе одного из датчиков (ошибка по углу) по сравнению с другНми на выходе соответствующего преобразователя напряжение отлично от двух других.. Это прИЕЮдит к неуравновешенности , а следовательно, и линейных напряжений между собой, TajcHM образом сработают два компаратора. Так, при неошхронной работе датчика 1 сработают компараторы 7 и 8, даг1ика 2 - компараторы 7 и 9, датчика 3 - компараторы 8 и 9. Дальнейшая обработка сигналов компараторов не представляет трудностей, при помощи логических элементов И однозначно определяется отказавший датчик. При возникновении перерьгоов в сигналах датчиков, переходных процессах в сигналах, период1гчески возникающих об- рьшов в цепи сигнала, при возникновении перерьша в цепи питания обмоток воз.буждения датчиков, появляющихся, например, переключения бортовых источников (автоматического или ручного) работа схемы 17 блокировки определяется состоянием триггера-защелки 19. При возникновении перерыва питания или отказа любого датчика триггер 19 взводится (устанавливается) в состояние, запрещающее прохождение сигналов отказов через схему 17. При отказе датчиков, вызванных перерывом питания, которое обнаруживает дискриминатор 18 перерыва, формирователь 20 времени блокировки удерживается в нулевом состоянии, а по заднему фронту перерыва снимает это состояние. Формирователь 2О времени блокировки начинает отсчет времени, считая число импульсов с частотой следования -f, и отсчитывая тем самым временной интервал, равный произведению периода следования импульсов на число импульсов. По мере заполнения (време1шой интервал определяется внутренней схемой формирователя) формируется сигнал окончания счета временного интервала, который переводит триггер-защелку 19 в исходное состо5шие, а сигнал блокировки снимается. При отказах датчиков, вызвагшых расхождением или другими причинами, формирователь 20 временного интервала сразу начинает отсчет времени. По окончании его снкмается блокировка отказов датчиков и если за счет времени блокировки отказ датчика не снялся, то этот отказ проходит на выход устройства. При отсутствии перерыва питания, но при возникновении отказа какого-либо датчика, последний через, элемент ИЛИ 16 взводит триггер-чзащелку 19, который сигналом Блокировка через схему 17 запрещает прохождение сигнала отказа датчика, в то же время разрешит работу формирователя 2О временного интервала. По окончании выдержки времени триггер-защелка 19 вернется в исходное положение, а сигнал Блокировка снима- ется. При одновременном появлении сигнала отказа датчика и снятии питания приоритет принадлежит работе устройства через дискриминатор 18, т.е. сигналу снятия питания., Таким образом, на время перерьта питания при переключении отказы датчик не вьвдаются. После восстановления питания на время, имеющих место переходных процессов в сети, также запрещается прохождение от11азов на время, с запасом превыщающее время переходных процессов. Отказы датчиков, вызванные, например, послевиражными уходами и пр. блокируются на определенное время, и если по истечении этого времени подтвердятся, то проходит на. выход устройства. Применение предлагаемого устройства позволит улучщить тактико-технические характеристики пилотажно-навигационного комплекса за счет повыщения достоверно ти контроля датчиков первичной информации, а следовательно, повысить безопасность полетов. Формула изобр.е тения Устройство для контроля датчиков угловых перемещений по авт. св. № 376661, отличающееся тем, что, с целью повьпиения достоверности контроля, в него введены генератор импульсов, дискриминатор перерыва, элемент ИЛИ, схема блокировки, триггерзащелка и формирователь времени блокировки, причем выходы элементов И соедине- }1Ы с входами схемы блокировки и элемента ИЛИ, выход которого соединен с входом триггера-защелки, второй вход которого соединен с Ьходом формирователя времени блокировки и выходом дискриминатора перерыва, вход которого соединен с входной клеммой питающего напряжения, выход генератора импульсов соединен с вторым входом формирователя времени блокировки, третий вход которого соединен с выходом триггера-защелки, а выход - с третьим входом триггеразащелки, второй выход .которого соединен с четвертьгм входом схемы блокировки, выходы которой соединены с выходными клеммами сигналов отказа. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 376661, кл. G01T) 5/2О, 1971.
Jv.
pi III
II
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля датчиковуглОВыХ пЕРЕМЕщЕНий | 1979 |
|
SU827977A2 |
| Способ управления преобразователем и устройство для его осуществления | 1980 |
|
SU955498A1 |
| Устройство акустического каротажа | 1986 |
|
SU1460710A1 |
| Устройство для дифференциальной защиты электроустановки | 1983 |
|
SU1141498A1 |
| Устройство контроля и управления процессом контактной стыковой сварки | 1986 |
|
SU1344545A1 |
| Аппаратура акустического каротажа | 1990 |
|
SU1797716A3 |
| Устройство для регулирования температуры | 1985 |
|
SU1260928A1 |
| Электропривод постоянного тока | 1986 |
|
SU1661951A1 |
| Устройство для контроля и сигнализации высоты полета самолета | 1990 |
|
SU1817125A1 |
| Устройство для передачи информации с вращающегося объекта | 1986 |
|
SU1334173A1 |