1
Изобретение относится к системам автоматического контроля и регулирования и может быть использовано для контроля резервированных систем автоматического управления.
Известно устройство для контроля датчиков угловых перемещений (основное авт. св. № 376661), содержащее преобразователи, ко входам которых подключены контролируемые датчики, а к выходам - нагрузочные резисторы, соединенные с логическими элементами И, компараторы. Нагрузочные резисторы соединены по схеме звезды, концы которой соединены со входами компараторов, выходы которых подключены ко входам логических элементов И 1.
Недостаток устройства - малые функциональные возможности, так как, контролируя датчики угловых перемещений, оно не может выдавать сигналов о достижении датчиками предельно допустимых (пороговых) значений углов.
Целью изобретения является расширение функциональных возможностей устройства.
Эта цель достигается тем, что в устройство, содержащее преобразователи, ко входам которых подключены контролируемые датчики, а к выходам-нагрузочные резисторы, соединенные с логическими элементами И, компараторы, нагрузочные резисторы соединены по схеме звезды, концы которой соединены со входами компараторов, выходы которых нодключены ко входам логических элементов И, введены дополнительный компаратор с источником опорного напряжения и кворум-элемент, сигнальные входы которого соединены с концами звезды нагрузочных резисторов, управляющие входы кворум-элемента соединены с выходами логических элементов И, выход кворум-элемента соединен с сигнальным входом дополнительного компаратора, опорный вход которого соединен с источником
опорного напряжения.
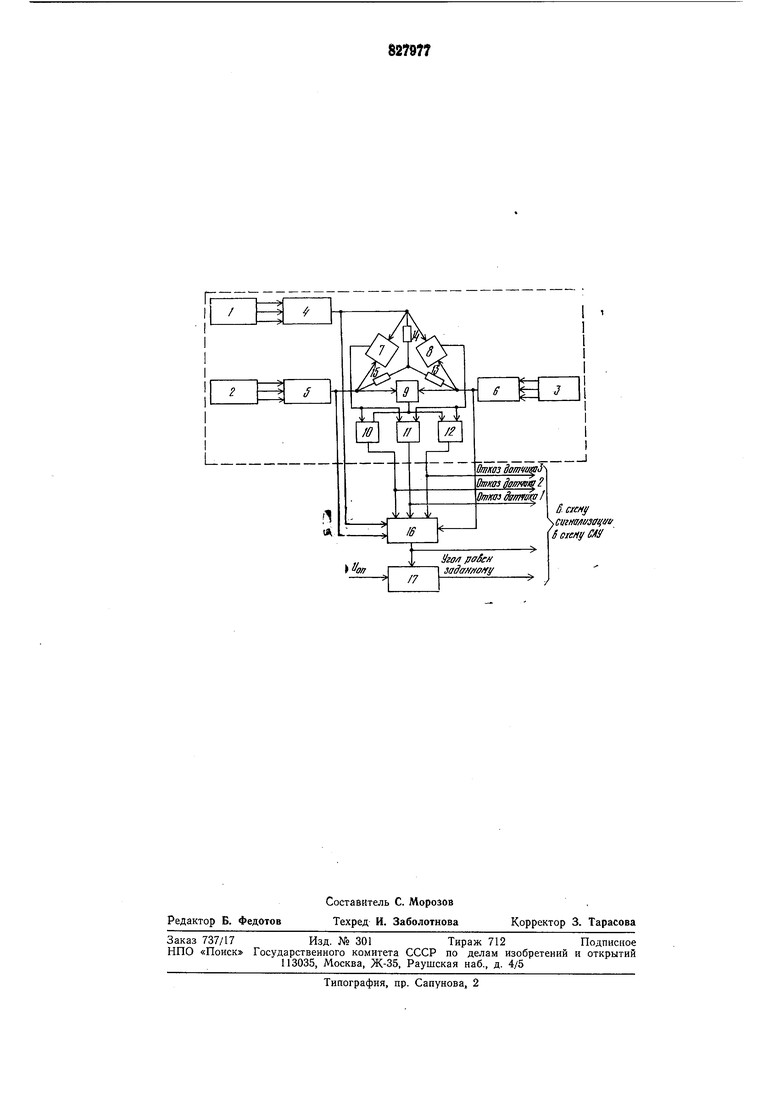
Блок-схема предложенного устройства приведена на чертеже.
На схеме изображены датчики угловых перемещений 1-3, преобразователи 4-6;
компараторы 7-9, элементы И 10-12, нагрузочные резисторы 13-15, кворум-элемент 16, дополнительный компаратор 17.
Датчики угловых перемещений 1-3 соединены с преобразователями 4-6, выходные резисторы 13-15 которых соединены звездой. Между концами этой звезды подключены компараторы 7-9, выходы попарно соединены с логическими элементами И 10-12. Одновременно концы звезды соединены с сигнальными входами кворум-элемента 16, управляющие входы которогосоединены с выходами элементов И 10-12.
Один из выходов кворум-элемента 16 соединен с сигнальным входом дополнительного компаратора 17, опорный вход которого соединен с источником опорного напряжения. Другой выход кворум-элемента 16 и выход компаратора 17 соединены со входами схемы сигнализации.
При синхронной работе датчиков выход ные напряжения преобразователей равны между собой, следовательно, равны и фазные напряжения звезды и, следовательно, на входах всех компараторов линейные напряжения также равны между собой. Поэтому все компараторы находятся в состоянии «О (низкий уровень).
Компараторы сработают, если разность напряжения на их входах больше .,
и
где L/Bs 1 - напряжение на одном входе; - напряжение на другом входе; (Уоп - опорное напряжение, одинаковое для всех компараторов, определяющее порог (чувствительность) устройства.
Выходное напряжение сработавших компараторов (высокий уровень) примем за логическую единицу.
При несинхронной работе одного из датчиков (ошибка по углу) по сравнению с другими на выходе соответствующего преобразователя напряжение отлично от двух других.
Это приводит к неуравновешенности фазных, а следовательно, и линейных напряжений между собой. Таким образом сработают два компаратора. Так, например, при несинхронной работе датчика 1 сработают компараторы 7 и 8, датчика 2 - компараторы 7 и 9, датчика 3-компараторы 8 и 9.
Дальнейшая обработка сигналов компараторов пе представляет трудностей. При помощи элементов И однозначно определяется отказавший датчик.
При работе устройства выходные напряжения преобразователей одновременно поступают на сигнальные входы кворум-элемента 16, выходное напряжение которого при синхронной работе всех трех датчиков описывается выражением:
г 7. /,- ВХ1 L/BXi Л вХЗI Л / /
-ВЫХ - А ,
где /УВХ, (78x2, вх 3 - выходные напряжения преобразователей 4-6;
К - коэффициент передачи (крутизна кворум-элемента);
MJocf-нулевое значение напряжения на выходе кворум-элемента.
При отказе КаКого либо датчика (несинхронной работе), последний исключается из рассмотрения, а выходное напряжение кворум-элемента (например, при выходе из строя датчика 3)
/7 .у ВХ1 + 8X2 1 л f;
t-sHX-АГ - ост.
При следующем отказе (втором отказе) в соответствии с принятой идеологией напряжение на выход кворум-элемента не проходит (запрещается дальнейшая выдача предельных значений).
Выходное напряжение кворум-элемента поступает на сигнальный вход дополнительного компаратора 17, на опорный вход которого заводится напряжение, соответствующее заранее заданному (предельно допустимому) значению (с учетом Абост) угла, сигнализировать о достижении которого необходимо из условия достижения граничных (экстремальных) условий. При равенстве сигнального и опорного напряжений
компаратор 17 изменит свое состояние и выдаст сигнал в схему сигнализации. Одновременно напряжение с кворум-элемента может быть использовано в других системах потребляемых сигналов датчиков, так
как оно является усредненным сигналом трех датчиков и обладает высокой достоверностью.
Введение кворум-элемента и дополнительного компаратора с источником опорного напряжения расширяет функциональные возможности устройства благодаря выдаче сигнала о достижении объектом предельно допустимого значения угла, что позволит оператору своевременно вмешаться
для принятия необходимых мер по устранению причин, приведших к этой ситуации.
Формула изобретения
Устройство для контроля датчиков угловых перемещений по авт. св. № 376661, отличающееся тем, что, с целью расширения функциональных возможностей, в него введены дополнительный компаратор с источником опорного напряжения и кворумэлемент, сигнальные входы которого соединены с концами звезды нагрузочных резисторов, управляющие входы кворум-элемента соединены с выходами логических элементов И, выход кворум-элемента соединен с сигнальным входом дополнительного компаратора, опорный вход которого соединен с источником опорного напряжения.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 376661, кл. G 01D 5/20, 1974 (прототип).
в. екну cuiHir/iu3at uo S oieny 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля датчиков угловых перемещений | 1981 |
|
SU1002836A2 |
| УСТРОЙСТВО для КОНТРОЛЯ ДАТЧИКОВ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1973 |
|
SU376661A1 |
| Устройство для контроля датчиков углового положения | 1974 |
|
SU481060A1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2101749C1 |
| Устройство для контроля датчиков углового положения | 1976 |
|
SU652600A1 |
| Аналоговое мажоритарное устройство | 1982 |
|
SU1084989A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОВТОРНОГО ВКЛЮЧЕНИЯ | 2004 |
|
RU2272347C1 |
| Преобразователь угла поворота вала в код | 1979 |
|
SU855711A1 |
| УСТРОЙСТВО ДЛЯ СИГНАЛИЗАЦИИ ПРЕДЕЛЬНЫХ ПАРАМЕТРОВ ВИБРАЦИИ | 1992 |
|
RU2045751C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |