(54) ПЕДАЛЬНЫЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Педальный привод | 1985 |
|
SU1294690A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2003 |
|
RU2274576C2 |
| ЛЕБЁДКА | 2018 |
|
RU2668880C1 |
| Устройство для уборки просыпи под конвейером | 1982 |
|
SU1084208A1 |
| РОЛЛЕР | 1991 |
|
RU2016807C1 |
| Стабилизатор скорости движения кинопленки | 1949 |
|
SU82284A1 |
| Лифт | 1979 |
|
SU893786A1 |
| Мускульный привод транспортного средства | 1982 |
|
SU1065279A1 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И ФИКСАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2209745C2 |
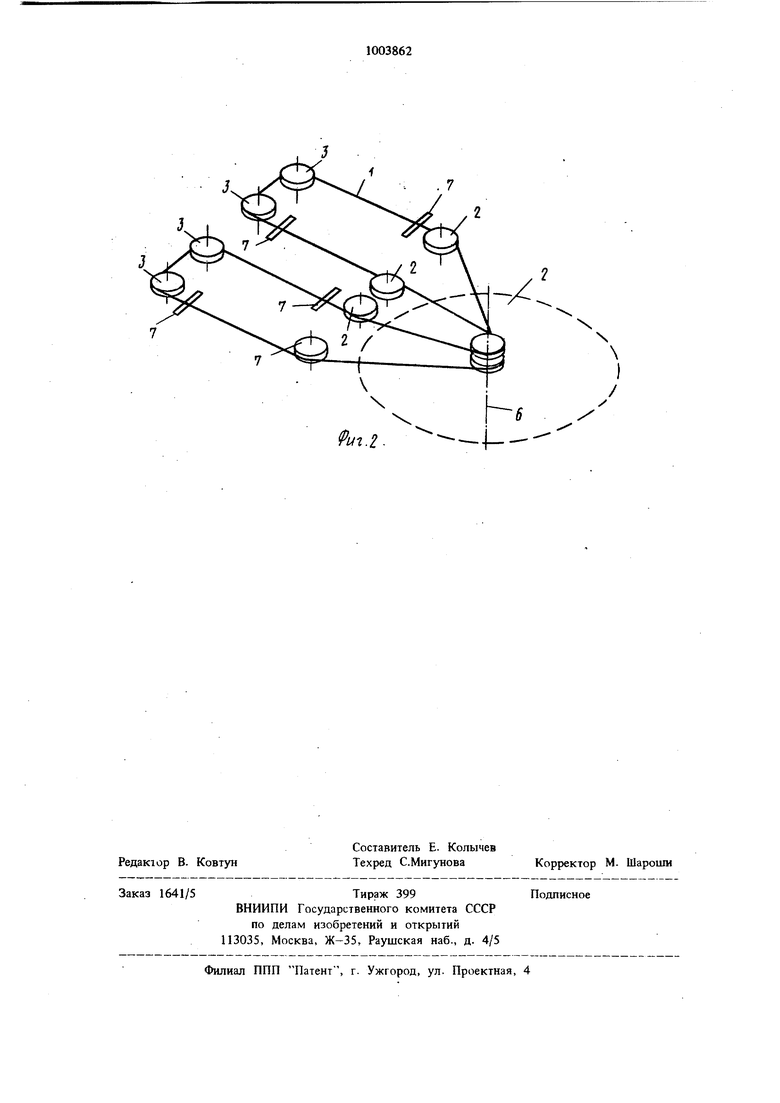
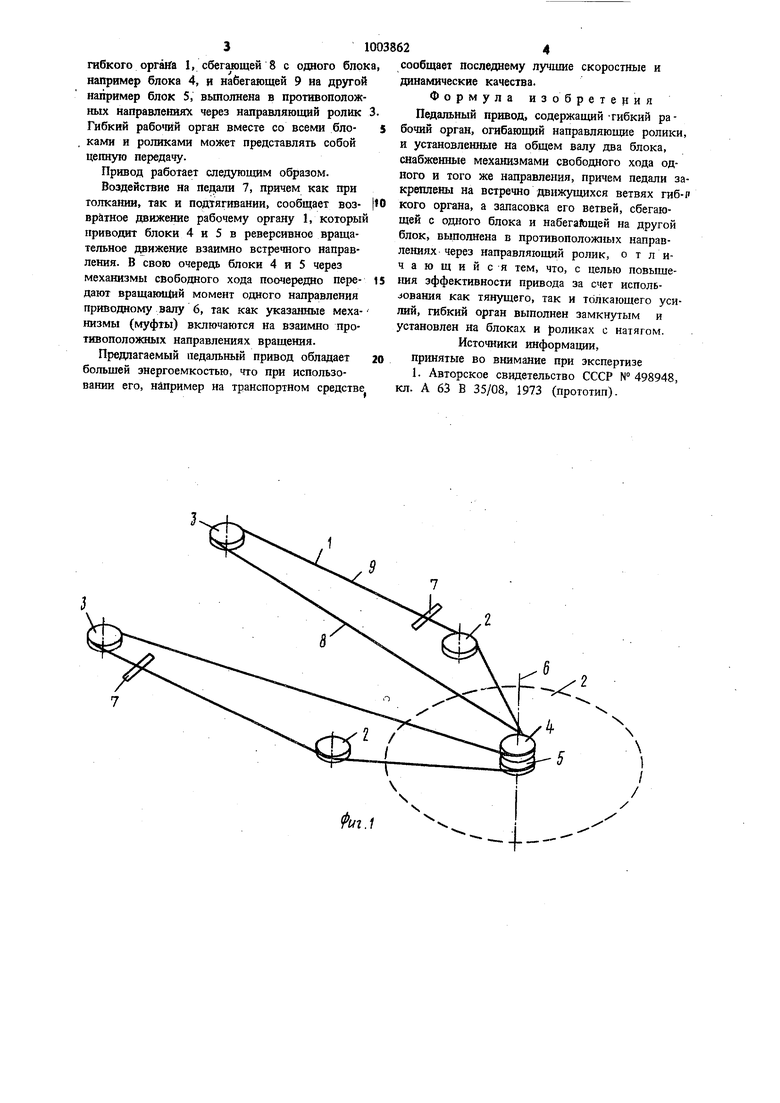
Изобретение относится к приводам различных транспортных средств, спортивных снарядов и т.п., приводимых в движение посредством мускульной энергии человека. Известен педальный привод, содержащий гибкий рабошй орган, огибающий направляющие ролики, и установленные на общем приводном валу два блока, снабженные механизмами свободного хода одного и того же направления, причем педали закреплены на встреч но движущихся ветвях гибкого органа, а запасовка его ветвей, сбегающей с одного блока и набегающей на другой блок, выполнена в противоположных направлениях через направляющий ролик {П. Однако зтот привод реализует лищь энерги тянущего усилия, а использование толкающего усилия невозможно. Цель изобретения - повыщение эффективно сти привода за счет использования как тянущего, так и толкающего усилий. Указа1шая цель достигается тем, что в педальном приводе, содержащем гибкий рабочий орган, огибающий направляющие ролики, и установленные на общем валу два блока, снабженные механизмами свободного хода одного и того же направления, причем педали закреплены на встречно движущихся ветвях гибкого органа, а запасовка его ветвей, сбегающей с одного блока и набегающей на другой блок, выполнена в противоположных направлениях через направляющий ролик, гибкий орган выполнен замкнутым и установлен на блоках и роликах с натягом. На фиг. 1 схематически представлен предложенный педальный привод для одаоместного объекта (транспортного средства, спортивного снаряда); на фиг. 2 - то же для двухместного объекта. Педальный привод включает гибкий рабочий орган 1, выполненный бесконечно замкнутым, который огибает натяжные ролики 2 и направляющие ролики 3, а также блоки 4 и 5. Блоки посажены на приводном валу 6 через механизм свободного хоДа одного и того же направления (не показаны). На ветйях гибкого органа 1, движущихся навстречу друг другу, закреплены педали 7. Запасовка ветвей
габкого opratfa 1, сбегающей 8 с одного блока, например блока 4, и набегающей 9 на яругой например блок 5, вьшолнена в противоположных направлениях через направляющий ролик 3. Гибкий рабочий орган вместе со всеми бло- 5 ками и роликами может представлять собой цепную передачу.
Привод работает следующим образом.
Воздействие на педали 7, причем как при толкании, так и псщтягивании, сообщает воз- |tO вр&тное движение рабочему органу 1, который приводит блоки 4 и 5 в реверсивное вращательное даижение взаимно встречного направления. В свою очередь блоки 4 и 5 через механизмы свободного хода поочередно пере- 15 дают вращаняиШй момент одного направления приводному валу 6, так как указанные механизмы (муфты) включаются на взаимно противоположных направлениях вращения.
Предлагаемый педальный привод обладает 20 больщей энергоемкостью, что при использовании его, например на транспортном средстве
сообщает последнему лучшие скоростные и динамические качества.
Формула изобретения Педальный привод, содержащий гибкий ра бочий орган, огибающий направляющие ролики, и установленные на общем валу два блока, снабженные механизмами свободного хода одного и того же направления, причем педали закреплены на встречно движущихся ветвях гиб-р кого органа, а запасовка его ветвей, сбегающей с одного блока и набега Ьщей на другой блок, выполнена в противоположных направлениях через направляющий ролик, о т л ичающийся тем, что, с целью повыщепия эффективности привода за счет использования как тянущего, так и толкающего усилий, гибкий орган выполнен замкнутым и установлен на блоках и роликах с натягом.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 498948, ют. А 63 В 35/08, 1973 (прототип).
