Заявляемое техническое решение относится к механизмам для приведения в действие различных устройств мускульной силой человека. Оно предназначено для преобразования возвратно-поворотных движений, например движений ступни и голени, во вращательное движение исполнительного органа устройства и может использоваться, в основном, в индивидуальных транспортных средствах типа роликовых коньков и скейтбордов, а также в тренажерах и других устройствах.
Ножные приводы с качающейся педалью для гончарных кругов, точильных камней, швейных машин и т.п. известны давно. Их недостатки - наличие «мертвых точек», невысокий КПД, необходимость строго определенной амплитуды движений ступни. Однако в названных устройствах нагрузки и скорости вращения невелики, поэтому используемые механизмы удовлетворительно выполняют свои функции.
Сложнее обстоит дело с приводом для названных выше индивидуальных транспортных средств, где на педали может действовать сила, превышающая все пользователя, а скорость вращения исполнительного органа - ведущего ролика - должна быть высокой. Попыткам снабдить механическим приводом роликовые коньки уже более 100 лет (US 606854, 1898; US 619370, 1899), однако реально используемых конструкций так и не создано.
Ножной привод включает педаль и трансмиссию (передачу). В приводных роликовых коньках педаль должна служить опорой для ноги и иметь шарнирное крепление к раме с возможностью поворотов вперед-назад в вертикальной плоскости. Качение происходит как за счет шаговых движений, так и за счет усилий ноги, прикладываемых к педали и передаваемых трансмиссией на ведущие ролики. Конструкция привода должна обеспечить естественный характер и удобство движений, эффективное использование мышечных усилий и возможность устойчиво стоять на педалях при движении накатом и остановках. Последнее требует наличия по меньшей мере двух точек опоры педали, фиксирующих ее горизонтальное или близкое к горизонтальному положение. Отметим, что перечисленным требованиям лучше всего отвечают движения ног при обычной ходьбе.
Во многих известных конструкциях шарнир крепления педали расположен в ее носке, а вторая опора - в пяточной ее части (СН 99784, SU 1284 573, SU 1750178, DE 4413712, US 5492345, ЕР 1163938). Такое двухопорное шарнирное крепление педали с передним размещением шарнира и задним размещением второй опоры обеспечивает фиксацию положения педали, близкого к горизонтальному, что дает возможность устойчиво стоять па ней. При шаговых движениях педаль может вслед за стопой поворачиваться к вертикальной плоскости вперед с подъемом задника вверх. Однако использование этого движения для создания движущей силы затруднено ввиду того, что поворот педали происходит не за счет давления носка ступни, а за счет тянущего усилия верхней поверхности ступни и лодыжки. К тому же высокое подымание задника педали приводит к сильному сгибанию ноги. Активной фазе движения соответствует не толчок стопой при ее повороте вперед, как при ходьбе, а утомительное «выжимание» педали вниз пяткой согнутой ноги. Причем оно происходит в момент, когда нога уже обгоняет центр масс пользователя. В результате конек «убегает» вперед, вызывая дополнительное напряжение задних мышц бедра и тазовых мышц.
Первый из этих недостатков частично устраняется смещением оси крепления педали в область подушечек ступни (US 1437314, DE 418603, SU 1768197, RU 2010584, WO 95/08372). Однако и в этом случае активной фазой движения остается выжимание педали пяткой ноги. К тому же педаль укорочена и носок ступни опирается на перекладину рамы, что приводит к потере части усилия. Исключением служит RU 8263 с жесткой педалью на всю длину ступни.
Почти полностью устраняются указанные выше недостатки при переносе оси крепления педали к середине ступни и отсутствии второй опоры (RU 2067481, WO 92/06753, WO 01/87436, WO 02/05910). Появляется возможность двустороннего действия: сначала давлением носка ступни, как при ходьбе, с опусканием носка педали вниз, затем - дополнительно - давлением пятки. Сгибание ноги минимально. Однако такое одноопорное шарнирное крепление педали не позволяет устойчиво стоять на ней при горизонтальном ее положении. Кроме того, при стоянии на месте любое колебание ступни приводит к движению конька вперед, что небезопасно. Этих недостатков нет в DE 4220798, но здесь передняя часть ступни опирается не на педаль, а на раму конька, что исключает основную активную фазу - опускание носка педали давлением ступни. В DE 2726961 предусмотрена задняя опора в виде пружины, но она лишь частично устраняет указанные недостатки.
Двухопорное шарнирное крепление педали с задним расположением шарнира и передним расположением второй опоры (SU 28428, SU 1248624) лишает педаль возможности поворота из опорного положения вперед и требует утомительного подымания носка ступни вверх. В US 3285618, US 4602801, US 5492345 и FR 2585582 носок педали подымается пружиной, но в активной фазе приходится преодолевать ее сопротивление, а опорное положение ступни неустойчиво. Известны также двухшарнирное крепление педали (SU 1785718, RU 2108833) и другие варианты, принципиально отличные от предлагаемого (US 4417737, US 4445698, US 4706974, US 5056802, FR 2539312, WO 91/15276, WO 92/22455).
Шарнирно закрепленная на раме педаль имеет очень малый ход, а частота ее нажатий ограничена. В то же время, для достижения высокой скорости движения при малом диаметре ходовых роликов необходима высокая частота их вращения. Поэтому передача должна иметь большое передаточное отношение. Кроме того, в первом звене передачи, считая от педали, действуют большие усилия, которые даже в статике могут превышать вес пользователя. При динамических же нагрузках, т.е. на ухабах, при прыжках и т.п., они многократно возрастают. В сочетании с плохими условиями эксплуатации (пыль, влага, отсутствие принудительной смазки) это предъявляет очень жесткие требования к прочности ближайших к педали элементов передачи.
Для роликовых коньков, скейтбордов и др. предлагались три вида передач: зубчатые, с гибкой связью и комбинированные. Зубчатая передача (US 1437314, DE 418603, SU 1248624, SU 1768197, RU 2156713, RU 8263, WO 93/01870, WO 01/87436) может обеспечить необходимое передаточное отношение. Однако для этого первое ее звено - зубчатая пара, состоящая из зубчатого сектора и шестерни, должно иметь зубья с модулем не более 1 мм. При указанных выше нагрузках и условиях работы добиться прочности и долговечности такой передачи, скорее всего, невозможно. Решением мог бы стать кривошипно-зубчатый (WO 95/08372) или эксцентриково-зубчатый (WO 92 /06753) механизм, но у него свои недостатки: невысокий КПД, наличие «мертвых точек», необходимость постоянной амплитуды движений педали.
В качестве гибкой связи используются приводные цепи и тросы, В цепных передачах (DE 2726961, DE 4220798, ЕР 1163938) для обеспечения необходимого передаточного отношения первая звездочка должна иметь очень малый диаметр, однако число зубьев не должно быть меньше 17...19. Ей соответствует цепь с очень малыми размерами звеньев, не обладающая требуемой прочностью. В тросовых передачах получить достаточное передаточное отношение можно только за счет введения полиспаста - нескольких промежуточных подвижных и неподвижных блоков (RU 2010584, RU 2067481). Однако при этом велики потери энергии на многократный изгиб троса вокруг блоков, имеющих малый диаметр. При небольшом числе блоков (US 3285618, US 5492345, SU 1785718, RU 2108833) передаточное отношение и, соответственно, скорость движения недостаточны.
Наиболее рациональной представляется комбинированная передача, включающая зубчатый механизм и механизм с гибкой связью (СН 99784, SU 12S4573, SU 1750718, US 4445698, US 5224719, US 5310202, WO 02/05910). Однако во всех этих конструкциях присутствует принципиальный недостаток: в качестве первого, наиболее нагруженного звена используются зубчатые пары. Как было сказано выше, обеспечить их прочность и долговечность едва ли возможно.
В качестве ближайшего аналога выбрана конструкция ножного привода из SU 1750718, соответствующая заявляемой по обоим основным признакам: двухопорное шарнирное крепление педали и наличие комбинированной передачи. К тому же эта конструкция является развитием двух предшествующих - SU 1248624 и SU 1284573 (US 4396204).
В известной конструкции педаль закреплена на раме транспортного средства с возможностью поворотов на некоторый угол в вертикальной плоскости. Кроме шарнира, педаль имеет вторую точку опоры, обеспечивающую фиксацию ее положения, близкого к горизонтальному. В этом положении педаль служит опорой для ноги, поэтому назовем его опорным. Шарнир расположен в носке педали, вторая опора - в пяточной ее части. Педаль выполнена недеформируемой и снабжена приспособлением для фиксации носка ступни, представляющем собой жесткий козырек, положение которого регулируется с помощью винтов.
Передача кинематически связывает педаль с исполнительным органом устройства - ведущим роликом (парой роликов). Она включает последовательно соединенные между собой зубчатый механизм, механизм с гибкой связью и механизм свободного хода. При этом педаль жестко соединена с ведущим губчатым сектором зубчатого механизма, ведомая шестерня этого механизма - с ведущим шкивом (барабаном) механизма с гибкой связью. В качестве гибкой связи используется трос, закрепленный своими концами на ведущем и ведомом шкивах и охватывающий их с одной стороны. Ведомый шкив (намоточный барабан) механизма с гибкой связью соосен с исполнительным органом устройства и соединен с ним через механизм свободного хода. В качестве последнего используется храповой механизм. Внутри ведомого шкива размещена возвратная пружина, соединяющая шкив с рамой привода и предназначенная для обратной перемотки троса и перевода педали в положение, максимально отклоненное от опорного.
Недостатки двухопорного крепления педали с передним расположением шарнира описаны выше. В данной конструкции они усугублены наклоном педали в ее опорном положении носком вниз. Шаговые движения возможны при этом только на полусогнутых ногах.
Недостатки комбинированной передачи, первым звеном которой является зубчатый механизм, также рассмотрены выше. В качестве проверки были выполнены кинематический расчет и расчет нагрузок для описываемой конструкции. Оказалось, что она может сообщить дополнительную скорость движения за счет привода не более 1 км/ч, одновременно вызывая сильное утомление вследствие неестественного характера движений. При этом даже статическая нагрузка на шестерню диаметром 19 мм вдвое превосходит вес пользователя, что неприемлемо по соображениям прочности.
Предложенное приспособление для фиксации ступни на педали не удержит на ноге даже двухколейные коньки, не говоря уж об одноколейных. Строго продольное расположение педалей неудобно для пользователя, т.к. не соответствует естественному положению ступней носками врозь. Тросовой гибкой связи сопутствуют потери энергии на изгиб троса при его наматывании на шкивы малого диаметра. Односторонний охват шкивов тросом обусловливает одностороннее действие передачи, а значит, использование только одной группы мышц. К тому же возникает необходимость в возвратной пружине, на циклическую деформацию которой расходуется часть энергии. Храповой механизм создает шум при работе и вызывает потери заметной части рабочего хода вследствие большого шага зубцов храповика.
Техническим результатом заявляемого решения является улучшение биомеханических свойств известного привода и повышение его эффективности. Поставленная техническая задача решается за счет изменения схемы опирания педали и схемы передачи. Для этого в известном ножном приводе, включающем педаль, служащую опорой для ноги и закрепленную шарнирно с возможностью поворотов в вертикальной плоскости на заданный угол от фиксированного опорного положения, и передачу (трансмиссию), кинематически связывающую педаль с исполнительным органом и содержащую зубчатый механизм, механизм с гибкой связью и механизм свободного хода, согласно заявляемому решению шарнир крепления педали расположен в средней ее части, педаль шарнирно соединена по меньшей мере с одним из гибких элементов механизма с гибкой связью, гибкие элементы закреплены своими концами на шкивах механизма с гибкой связью и охватывают шкивы этого механизма с двух сторон, ведомый шкив соединен с ведущей шестерней зубчатого механизма, а ведомая шестерня этого механизма соединена с исполнительным органом устройства. В качестве гибких элементов используются тонкие ленты из гибкого материала или тросы.
Вследствие размещения шарнира крепления педали к средней ее части при повороте педали ее носок опускается вниз. Благодаря этому основным полезным усилием становится давление носком ступни, как при ходьбе, а сгибание ноги значительно уменьшается. Вместе с тем, сохраняется возможность достаточно надежно стоять на педали благодаря наличию второй опоры, расположенной позади шарнира, как и в ближайшем аналоге. Благодаря тому, что педаль непосредственно соединена не с зубчатым механизмом, а с гибким элементом, наибольшая нагрузка ложится именно на гибкий элемент, обеспечить прочность которого значительно легче, чем мелкомодульной шестерни. Кроме того, диаметр шкива механизма с гибкой связью может быть меньше, чем диаметр шестерни, что позволяет увеличить передаточное число передачи, а значит, и скорость движения. При переходе крутящего момента от шкива малого диаметра к скрепленной с ним ведущей шестерне большого диаметра величина усилия на зубьях резко уменьшается, что снимает проблему прочности зубчатого механизма. Шарнирное соединение педали с гибким элементом необходимо ввиду того, что педаль совершает поворотное движение, а гибкий элемент - возвратно-поступательное. Двусторонний охват шкивов гибкими связями обеспечивает возможность как одностороннего, так и двустороннего действия привода: сначала от нажатия носком ступни, затем от давления пяткой. К тому же энергия, затрачиваемая на деформацию возвратной пружины (если она имеется) в прямом ходе, полезно используется в обратном. Все это повышает эффективность привода.
Причем шарнир крепления педали размещен на кронштейне, жестко скрепленном с педалью, что увеличивает плечо и путь действия сил, прикладываемых к педали, а значит, и полезную работу.
При этом в опорном положении педаль отклонена от горизонтали носком вверх с возможностью регулирования угла отклонения. Это делает более естественным положение ступни при выдвижении ноги вперед и позволяет увеличить рабочий ход педали.
Более того, продольная ось педали повернута относительно продольной оси устройства носком наружу на угол, соответствующий естественному положению ступней, с возможностью его регулирования. Разворот педалей носками врозь делает транспортное средство более комфортабельным. Возможность регулирования углов установки педалей в вертикальной и горизонтальной плоскостях позволяет адаптировать транспортное средство к индивидуальным особенностям пользователя.
Притом носок педали выполнен гибким с возможностью его отклонения вверх от плоскости педали, а ее задник - упругим в вертикальной плоскости. Также носок педали может быть закреплен шарнирно с возможностью отклонения вверх от плоскости педали. Возможность отклонения носка педали вверх в сочетании с ограничителем хода педали позволяет сохранить достаточный дорожный просвет без увеличения высоты транспортного средства. Упругий задник педали дает амортизирующий эффект в момент опирания ноги на пятку.
Кроме того, приспособление для фиксации ступни на педали выполнено с возможностью перемещения его элементов по педали в продольном и поперечном отравлениях, а также с использованием гибких материалов и быстроразъемных соединений. Это обеспечивает надежное, удобное и быстрое закрепление коньков на ноге, причем в широком диапазоне размеров обуви.
В то же время, шарнир, соединяющий педаль с гибкой связью передачи, установлен с возможностью продольных перемещений относительно педали, что необходимо для компенсации различия траекторий движения точек педали и гибкой связи.
Причем в качестве гибких связей используются тонкие ленты из гибкого материала. Это позволяет уменьшить диаметр шкивов и устраняет потери энергии на изгибание троса.
К тому же ведомый шкив механизма с гибкой связью соединен с ведущей шестерней зубчатого механизма посредством механизма свободного хода. Такое размещение механизма свободного хода уменьшает массу и момент инерции деталей со знакопеременным вращением.
При этом в качестве механизма свободного хода используется микрохраповой механизм. Это уменьшает шум при работе и потери рабочего хода педали.
Возможно также применение механизма свободного хода фрикционного типа, что полностью устраняет шум.
Кроме того, педаль соединена с рамой привода возвратной пружиной, обеспечивающей возвращение педали в ее опорное положение. Пружина также препятствует отвисанию задней части транспортного средства при подъеме ноги, например при ходьбе по лестнице.
Вместе с тем, передача дополнительно включает второй механизм свободного хода и второй зубчатый механизм, соединенные между собой, причем второй механизм свободного хода установлен с противоположным управлением действия относительно первого, ведомая шестерня второго зубчатого механизма имеет общую ось с ведомой шестерней первого, а конструкция второго зубчатого механизма обеспечивает одинаковое с первым направление вращения ведомых шестерней при противоположном направлении вращения ведущих.
Возможно также, что передача включает второй механизм с гибкой связью, второй механизм свободного хода и второй зубчатый механизм, соединенные между собой, причем второй механизм с гибкой связью имеет общий опорный шкив с первым таким механизмом и перекрестное расположение гибких элементов, а ведомая шестерня второго зубчатого механизма имеет общую ось с ведомой шестерней первого. Вариант передачи, дополнительно включающий механизм свободного хода с противоположным направлением действия и измененный зубчатый механизм, обеспечивает возможность двустороннего действия привода. Движущая сила создается как при повороте педали вперед, так и при ее возвращении в опорное положение. Это позволяет увеличить скорость движения или периодически давать отдых одной из групп мышц ноги. Сказанное относится и к варианту передачи, дополнительно включающему измененный механизм с гибкой связью, механизм свободного хода и зубчатый механизм.
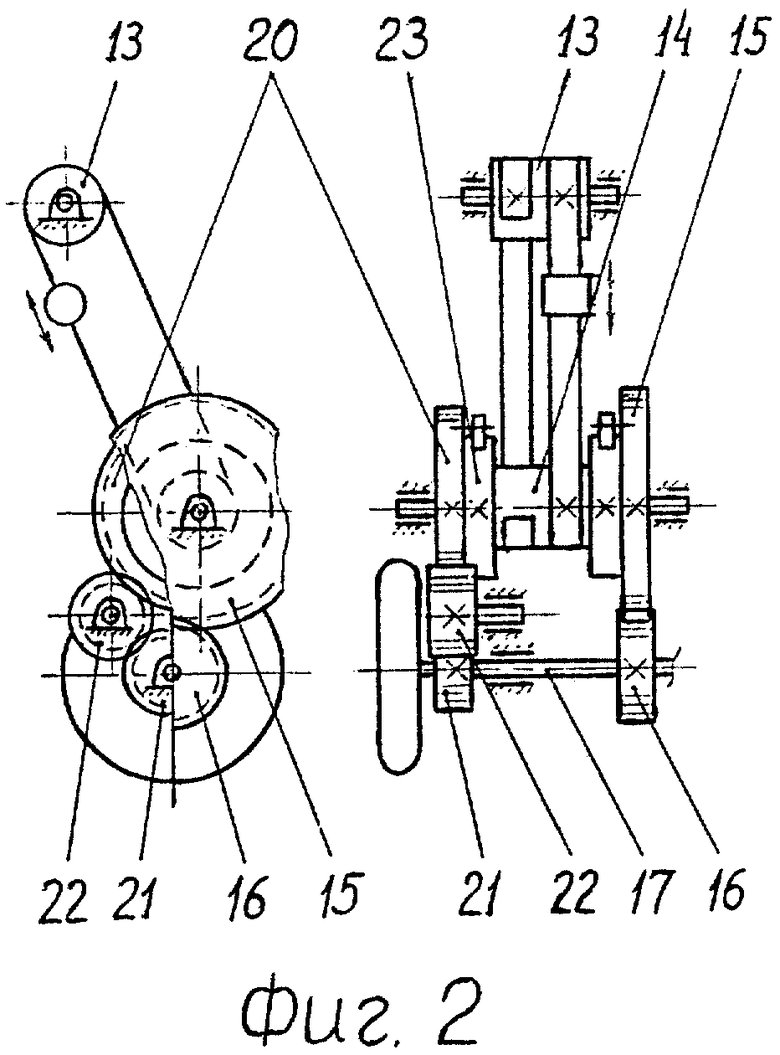
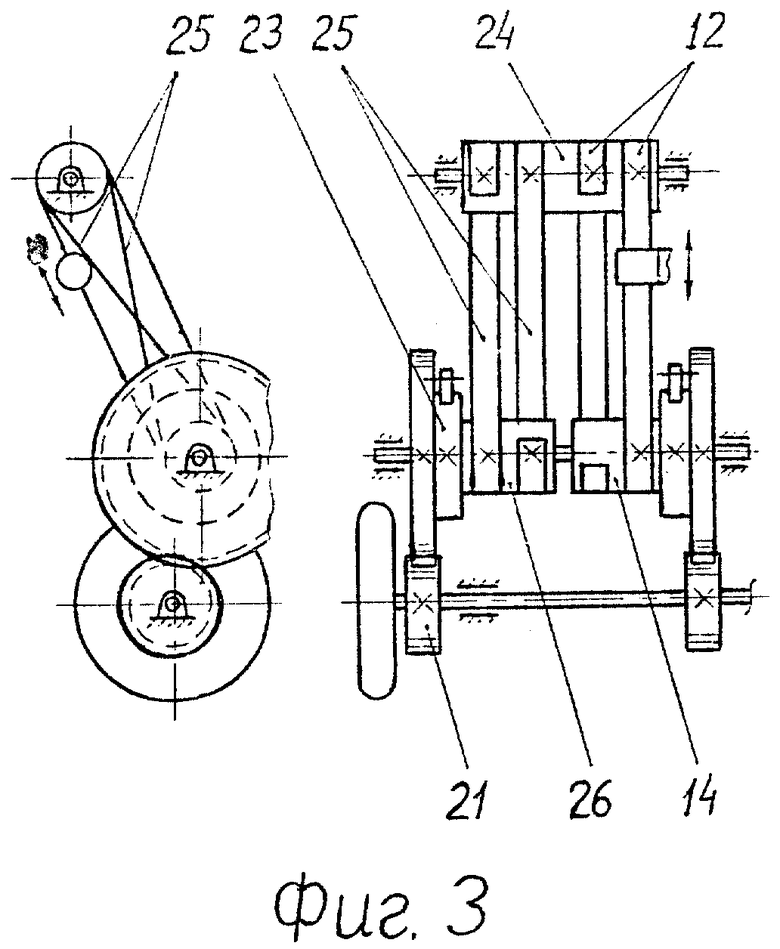
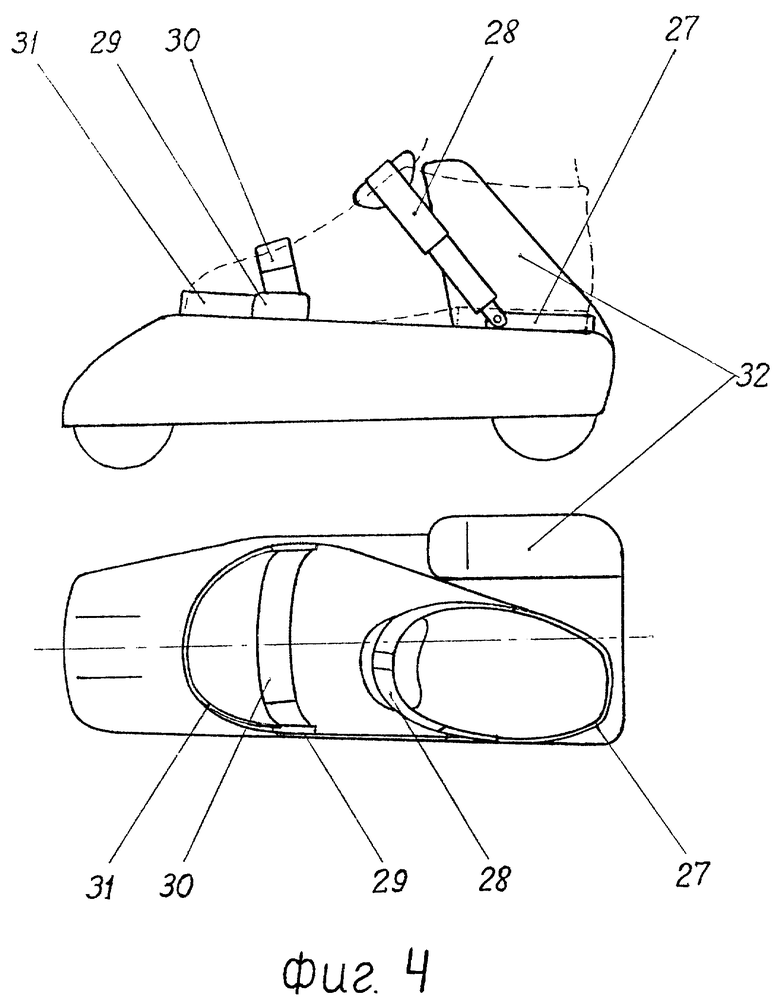
Заявляемое техническое решение поясняется схематическими изображениями фиг.1, 2, 3 и 4. На фиг.1 показан ножной привод с передачей одностороннего действия, вид сбоку и спереди; на фиг.2 - передача двустороннего действия с измененным зубчатым механизмом, на фиг.3 - передача двустороннего действия с измененным механизмом с гибкой связью; на фиг.4 - примерный внешний вид роликовых коньков с приводом и элементы устройства фиксации ступни, вид сбоку и сверху.
На чертеже приведены следующие цифровые обозначения: 1 - педаль; 2 - носок педали; 3 - задник педали; 4 - шарнир крепления педали; 5 - кронштейн крепления педали; 6 - опорное положение педали; 7 - вторая опора педали; 8 - ограничитель хода педали; 9 - возвратная пружина; 10 - соединительный шарнир; 11 - кронштейн; 12 - гибкие элементы; 13 - опорный шкив; 14 - ведомый шкив; 15 - ведущая шестерня; 16 - ведомая шестерня; 17 - ведущая ось (ось исполнительного органа); 18 - механизм свободного хода; 1 исполнительный орган устройства; 20 - ведущая шестерня; 21 - ведомая шестерня; 22 - промежуточная шестерня; 23 - механизм свободного хода; 24 - опорный шкив; 25 - гибкие элементы; 26 - ведомый шкив; 27 - пяточный упор; 28 - задний ремень; 29 - боковой упор; 30 - передний ремень; 31 - носковой упор; 32 - кожух трансмиссии.
Педаль 1 (фиг.1) имеет подвижный носок 2 и упругий задник 3. Она кренится к раме привода посредством шарнира 4, с которым соединяется кронштейном 5 или непосредственно. Местоположение шарнира относительно педали выбирается по условиям достаточного запаса устойчивости пользователя при стоянии на педали - с одной стороны, и минимального плеча силы веса пользователя относительно шарнира - с другой. Расстояние от задника педали до проекции шарнира на нее может составлять 0,5...0,6 длины педали.
В своем опорном положении педаль опирается на вторую опору 7, в положении максимального отклонения - на ограничитель 8. Средний физиологический угол разворота педали 9 градусов, угол наклона к горизонту в пределах 6 градусов. Положение ограничителя, в сочетании с применением подвижного носка педали, должно обеспечить возможно больший угол поворота педали при заданной величине дорожного просвета и возможно меньшей высоте транспортного средства. Пружина 9 обеспечивает возвращение педали в исходное положение. В вариантах с передачей двойного действия она может отсутствовать.
Соединительный шарнир 10, способный поворачиваться вокруг своей оси и перемещаться по скрепленному с педалью кронштейну 11, соединяет педаль с одним из гибких элементов 12. Роль кронштейна 11 может играть шатун, шарнирно соединенный с педалью и гибким элементом и расположенный примерно параллельно последнему. Гибкие элементы закреплены своими концами на шкивах механизма с гибкой связью - опорном 13 и ведомом 14, и охватывают их с двух сторон. Гибкие элементы могут быть изготовлены в виде лент из высокопрочной ткани или тонких стальных тросиков.
Ведомый шкив 14 соосен и жестко скреплен с ведущей шестерней 15 зубчатого механизма. Шестерня 15 входит в зацепление с ведомой шестерней 16. Возможны и другие схемы зубчатого механизма, например с внутренним зацеплением. Шестерня 16 свободно насажена на ведущую ось 17 и соединена с ней через механизм свободного хода (обгонную муфту) 18. Последний жестко закреплен на оси 17 и через нее или непосредственно связан с исполнительным органом устройства 19. Возможна установка механизма свободного хода соосно с ведущей шестерней 15, как показано на фиг.2 и 3. Целесообразно применять микрохраповые и, возможно, фрикционные механизмы свободного хода, например роликовые, клиновые или др.
Передача двустороннего действия по фиг.2 дополнительно включает измененный зубчатый механизм, содержащий, кроме ведущей 20 и ведомой 21 шестерней, также промежуточную шестерню 22 и механизм свободною хода 23, установленный со встречным относительно основного такого механизма направлением действия. Место его установки может быть и другим, например, как на фиг.1, или соосно с промежуточной шестерней 22.
Передача двустороннего действия фиг.3 дополнительно включает измененный механизм с гибкой связью, механизм свободного хода и зубчатый механизм. Механизм с гибкой связью содержит общий с основным таким механизмом удлиненный опорный шкив 24, перекрещивающиеся гибкие элементы 25 и ведомые шкивы - основной 14 и дополнительный 26, свободно насаженные на ось и способные вращаться в противоположных направлениях. Дополнительный механизм свободного хода 23 установлен со встречным относительно основного механизма направлением действия. Место их установки может быть и другим, как на фиг.1.
Приспособление для фиксации ступни на педали (фиг.4) включает пяточный упор 27, положение и/или размеры которого могут регулироваться в соответствии с размером обуви пользователя; закрепленный на нем задний ремень 28 с быстроразъемным соединением, например из материала «липучка»; правый и левый боковые упоры 29 с закрепленными на них передним ремнем 30 и регулируемым носковым упором 31. Для спортивных одноколейных коньков может оказаться целесообразным применение специальных ботинок, скрепляемых с педалью.
Устройство приводится в действие нажатием на педаль передней частью ступни и, дополнительно, тянущим усилием лодыжки, передаваемым ремнем 28 на задник педали. При повороте педали вокруг оси шарнира 4 соединительный шарнир 10 увлекает скрепленный с ним гибкий элемент, что приводит во вращение шкивы 13 и 14 механизма с гибкими связями. Вращение передается на ведущую шестерню 15 зубчатого механизма, далее на ведомую шестерню 16 и, через механизм свободного хода 18, на ведущую ось 17 или на сам исполнительный орган 19.
Благодаря повороту головки соединительного шарнира 10 и его перемещению по кронштейну 1 1 поворот педали не вызывает поперечной деформации гибкого элемента. Амплитуда поворота педали выбирается пользователем произвольно, ограничитель 8 лишь задает максимальную ее величину.
В случае привода с передачей одностороннего действия (фиг.1) активной фазе движения исполнительного органа соответствует только прямой ход педали. Обратный ее ход осуществляется слабым давлением пятки на задник педали и/или под действием возвратной пружины 9. Он сопровождается обратной перемоткой гибких элементов и обратным вращением шкивов и шестерней. Однако механизм свободного хода 18 не передает это вращение на ведущую ось, благодаря чему она продолжает пассивное вращение в прежнем направлении (выбег, движение накатом), затем активная фаза повторяется.
При использовании передач двустороннего действия (фиг.2 и 3) активной или пассивной фазе движения может соответствовать любой ход педали - как прямой, так и обратный. При прямом ходе действие первой, основной цепочки механизмов не отличается от изложенного выше. Если скорость поворота педали достаточно велика, и механизм свободного хода 18 стремится обогнать ведущую шестерню 15 (или ведущую ось 17, если он установлен на ней), то фаза движения будет активной, если нет - то пассивной. В дополнительной цепочке механизмов вращение ведомой шестерни 21 и ведущей оси должно было бы быть обратным: в схеме фиг.2 - ввиду наличия промежуточной шестерни 22, в схеме фиг.3 - ввиду перекрестного расположения гибких элементов 25. Однако этого не происходит благодаря соответствующей установке механизма свободного хода 23.
При обратном ходе педали механизм свободного хода основной цепочки разобщает ведомый шкив 14, а значит, и педаль, с зубчатым механизмом и ведущей осью 17. Одновременно механизм свободного хода дополнительной цепочки 23 связывает ведомый шкив 14 (фиг.2) или 26 (фиг.3), а значит, и педаль, с зубчатым механизмом и ведущей осью. При этом направление вращения ведомой шестерни 21 дополнительной цепочки оказывается тем же, что у аналогичной шестерни 16 основной цепочки при прямом ходе педали. Поэтому, если скорость поворота педали достаточна, ее обратный ход тоже становится активной фазой, как и прямой ход.
Если ведущая ось 17 вращается, а педаль неподвижна, то во всех трех вариантах привода механизмы свободного хода разобщают ведущую ось с педалью, обеспечивая тем самым возможность движения накатом (выбега). Однако при малейшем повороте исполнительного органа и ведущей оси в обратную сторону механизмы свободного хода запираются, передавая усилия в обратном направлении. В схеме с передачей одностороннего действия обратное усилие парируется встречным усилием ступни или реакцией второй опоры 7. В схемах с передачей двустороннего действия две цепочки механизмов передают на общий опорный шкив 13 или 24 два разных по величине и противоположных по направлению усилия, парирующих друг друга. Таким образом, независимо от выбранной схемы передачи, вращение рабочего органа возможно только в одном направлении, задний ход невозможен. Применительно к индивидуальным транспортным средствам это удобно при стоянии на месте, первоначальном разгоне и подъеме в гору.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕДАЛЬНЫЙ ПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2417918C2 |
| ПЕДАЛЬНЫЙ ПРИВОД СУДНА, НАДУВНОЕ СУДНО, СПОСОБ ПЕРЕДВИЖЕНИЯ НАДУВНОГО СУДНА ПО ВОДЕ И СПОСОБ УСТАНОВКИ ПРИВОДА НА НАДУВНОЕ СУДНО | 2013 |
|
RU2608991C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С МУСКУЛЬНЫМ ДВИГАТЕЛЕМ | 1992 |
|
RU2033367C1 |
| ТРЕНАЖЕР ХОДЬБЫ И БЕГА | 2024 |
|
RU2838969C1 |
| ТРЕНАЖЕР ХОДЬБЫ И БЕГА | 2024 |
|
RU2841558C1 |
| РОЛИКОВЫЕ КОНЬКИ | 1990 |
|
RU2067481C1 |
| ТРЕНАЖЕР ХОДЬБЫ И БЕГА | 2024 |
|
RU2836214C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| ПРИВОД ВЕЛОСИПЕДА (ВАРИАНТЫ) | 2013 |
|
RU2539260C1 |
| ТРЕНАЖЕР ХОДЬБЫ И БЕГА | 2024 |
|
RU2836216C1 |
Изобретение относится к рычажному приводу, преимущественно для роликовых коньков. Шарнир (4) крепления педали (1) расположен в средней ее части. Педаль (1) соединена с одним из гибких элементов (12), которые закреплены своими концами на шкивах (13, 14) механизма с гибкой связью и охватывают шкивы (13, 14) этого механизма с двух сторон. В качестве гибких элементов используются тонкие ленты из гибкого материала или тросы. Один из шкивов (14) соединен с ведущей шестерней (15) зубчатого механизма. Техническое решение направлено на обеспечение меньшего диаметра шкива по сравнению с диаметром обычной зубчатой шестерни, что позволяет увеличить передаточное число трансмиссии и, следовательно, скорость движения. 15 з.п. ф-лы, 4 ил.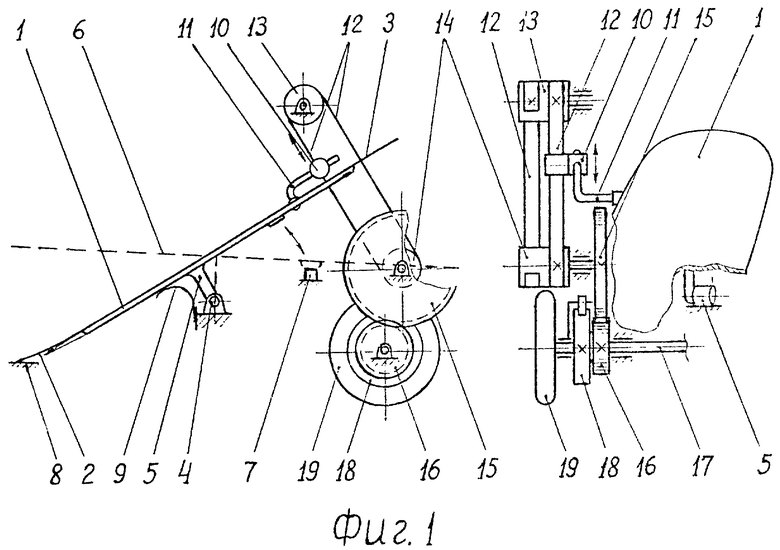
| Устройство для измерения расхода | 1979 |
|
SU855400A2 |
| Способ определения фракционногоСОСТАВА изМЕльчЕННыХ МАТЕРиАлОВ | 1978 |
|
SU798554A1 |
| US 1334609 A, 23.03.1920 | |||
| ВЫСОКОТЕМПЕРАТУРНАЯ ПАРОСИЛОВАЯ УСТАНОВКА | 2018 |
|
RU2726961C1 |
| JP 2003024498 A, 28.01.2003 | |||
| Роликовые коньки | 1986 |
|
SU1750718A1 |
| Подшипник качения | 1979 |
|
SU968517A1 |
| US 1782078 A, 18.11.1930. | |||

