(54) КОМПЕНСАЦИОННАЯ МУФТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсационная муфта | 1976 |
|
SU608020A1 |
| Компенсационная муфта | 1989 |
|
SU1661503A2 |
| Компенсационная муфта | 1978 |
|
SU737677A1 |
| Плавающий патрон | 1979 |
|
SU941020A1 |
| Предохранительная фрикционная муфта | 1989 |
|
SU1762018A1 |
| МУФТА | 2010 |
|
RU2437007C1 |
| Компенсирующая муфта | 1976 |
|
SU607074A1 |
| Винтовой механизм юстировки | 1983 |
|
SU1343445A1 |
| "Устройство для обработки трехмерных поверхностей | 1973 |
|
SU485850A1 |
| Устройство для получения тарированного крутящего момента | 1986 |
|
SU1460459A1 |
1
Изобретение относится к машиностроению, в частности к ненагруженным устройствам для передачи точного вращения.
Известна компенсационная муфта, содержащая две полумуфты, крестовину и промежуточные тела 1.
Недостатками данной муфты являются повыщенная чувствительность к загрязнению и невозможность компенсации кинематической погрешности механизма.
Известна компенсационная муфта, содержащая две полумуфты и промежуточную крестовину, соединенную с каждой из полумуфт при помощи пальцев со сферическими головками, при этом пальцы установлены в плоскости, перпендикулярной к оси вращения муфты, а также узлы компенсации кинематической погрешности ведущего механизма 2.
Недостатком этой муфты является малый диапазон компенсации кинематической погрешности.
Цель изобретения - увеличение диапазона компенсации и повышение точности.
Поставленная цель достигается тем, что в компенсационной муфте, содержащей две кулачковые полумуфты и промежуточную
крестовину, соединенную с каждой из полумуфт при помощи пальцев со сферическими головками, установленных в плоскости, перпендикулярной к оси вращения муфты, а также узлы компенсации кинематической погрешности ведущего механизма, каждый узел компенсации выполнен в виде двух винтов, в кулачках полумуфт и выступах крестовины выполнены направляющие пазы для пальцев, а винты расположены в кулачках полумуфт и выступах крестовин
10 с возможностью регулировочного вращения относительно своих осей, при этом пальцы размещены в направляющих пазах, а их сферические головки - в углублениях между витками винтов.
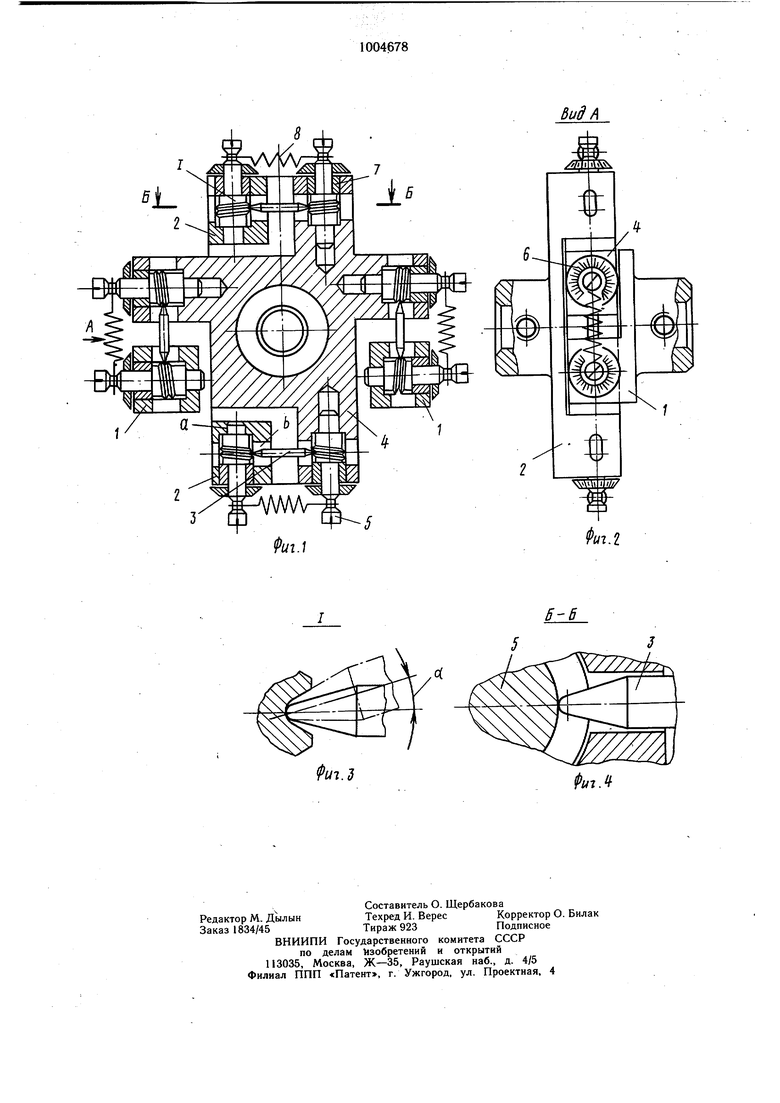
На фиг. 1 показана муфта, поперечное
15 сечение; на фиг. 2 - вид А на фиг. I; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 1.
Муфта состоит из кулачковых полумуфт 1 и 2, на каждой из которых выполнены от верстия и пазы, четырех пальцев 3, крестовины 4 с отверстиями а и пазами в, восьми винтов 5, расположенных в отверстиях полумуфт и крестовин и имеющих лимбы 6. Винты зафиксированы от осевого перемещения втулками 7 и замыкаются попарно через пальцы люфтовыбирающими пружинами 8.
Муфта работает следующим образом.
Пальцы 3 до регулировки попарно параллельны, а расстояния ОО и О OJ равны.
При передаче вращения между валами с параллельно смещенными осями происходит компенсационное движение между полумуфтамй и крестовиной, так как пальцы 3 имеют возможность качания в плоскости, перпендикулярной оси вращения муфты. При этом относительное угловое положение крестовины и полумуфт не изменяется, т. е. муфта не создает дополнительной кинематической погрещности. При необходимости компенсации кинематической погрешности механизма (известной величины и фазы) соответствующий винт 5 поворачивают по лимбу 6 на расчетный угол зависящий от геометрических параметров муфты, величины параллельного смещения соединяемых валов, величины компенсируемой кинематической погрешности механизма и параметров винтовой канавки винта 5. При этом центр сферы пальца 3, сопрягаемого с винтовой канавкой винта 5, перемещается вдоль оси последнего, следовательно, равенство и параллельность сторон ОО и ОО нарущается. В процессе передачи вращения между валами отрегулированная таким образом муфта начинает генерировать дополнительную кинематическую погрешность за счет периодического углового рассогласования между крестовиной и соответствующей полумуфтой.
Периодичность такой погрешности - 1 оборот муфты.
При наложении в противофазу указанной погрешности на кинематическую погрешность механизма осуществляется компенсация кинематической погрешности механизма. Поскольку щаг винтовой канавки может быть выполнен равномерным, точность компенсации сохраняется на всем диапазоне регулирования.
Эффект состоит в расщирении диапазона компенсации кинематической погрещности при повышении точности.
Формула изобретения
Компенсационная муфта, содержащая две кулачковые полумуфты и промежуточную крестовину, соединенную с каждой из полумуфт при помощи пальцев со сферическими головками, установленных в плоскости, перпендикулярной оси вращения муфты, а также узлы компенсации кинематической погрешности ведущего механизма, отличающаяся тем, что, с целью увеличения диапазона компенсации и повыщения точности, каждый узел компенсации выполнен в виде двух винтов, в кулачках полумуфт и выступах крестовины выполнены направляющие пазы для пальцев, а винты расположены в кулачках полумуфт и выступах крестовин с возможностью регулировочного вращения относительно своих осей, при этом пальцы размещены в направляющих пазах, а их сферические головки - в углублениях между витками винтов.
Источники информации,
принятые во внимание при экспертизе
Фи1.д
