:,:/;, г;. X 1Лир;:t Mi , л т,-;кже к.;1сЧ л иями приборок ,
KixjMc; Toio,. н 3Mcpnrc/rbt-;ui снстг;мл (:)ijoc -oJihi-o сложна, (скопьку е
КаЖ.П(.)М к : МОрИТО.1е ТОЧ;; ИЙ НС1К.).ПЬЗУПся г;г1 ,цнг гидрп iKycTs-гческнх пособра;оясг;С- я ; приемника .гг передлтчика . Наобходимл оркя -:тпг1И т акустически-;;-: ОЛЭ кажлсмо измерителя скорости те:ения отпосита;к;Но плоскости магнит ;;ого меридиана при гюмощи компасов, :тс таклсе усложняет (мгрнтелг.нукЗ систет.
Цел5ло изобрет-ения, ;вляетс/г повыJGSiSie точности измерегп- я ,
Поста пленная цель ггостигается /;ем, что в устройстЕе три буйковые станции размещены п исследуемой акчгачории океана так, -то образую- тре-угольник с неравнглглт сторонам}; ,, при лтом на первой буйковой станции внедон л радиопередатчик с программным блоком и коГ мутирующий блок с двумя йыхо.цамт . а иа второй к трелье й буйк чых CTRKaJiRx дведенк по одному радисприямкику -1 KOMviyTKpyiOiiieMy блоку с двумя выходами, причем выход програлФ-шого блока, соединенный с нкодом радиопередатчика иа первой буйковой станции и выход каждого радх- огтриемчика второй и третьей буйгсовых ;::танций соединенгл с входами передатчиков гидроакустического преобразоватоля и ггервыми входами из---;ери; елей Бременных интервалов, к вторым зхо-дам KOTopi-Jx подключены первый и второй зглходи комму тиру;о -гих блоков , вхо : оторк х сглгдииеп с выходом приемиргкок пн,прсакуст чееко1:о преобразователя ;
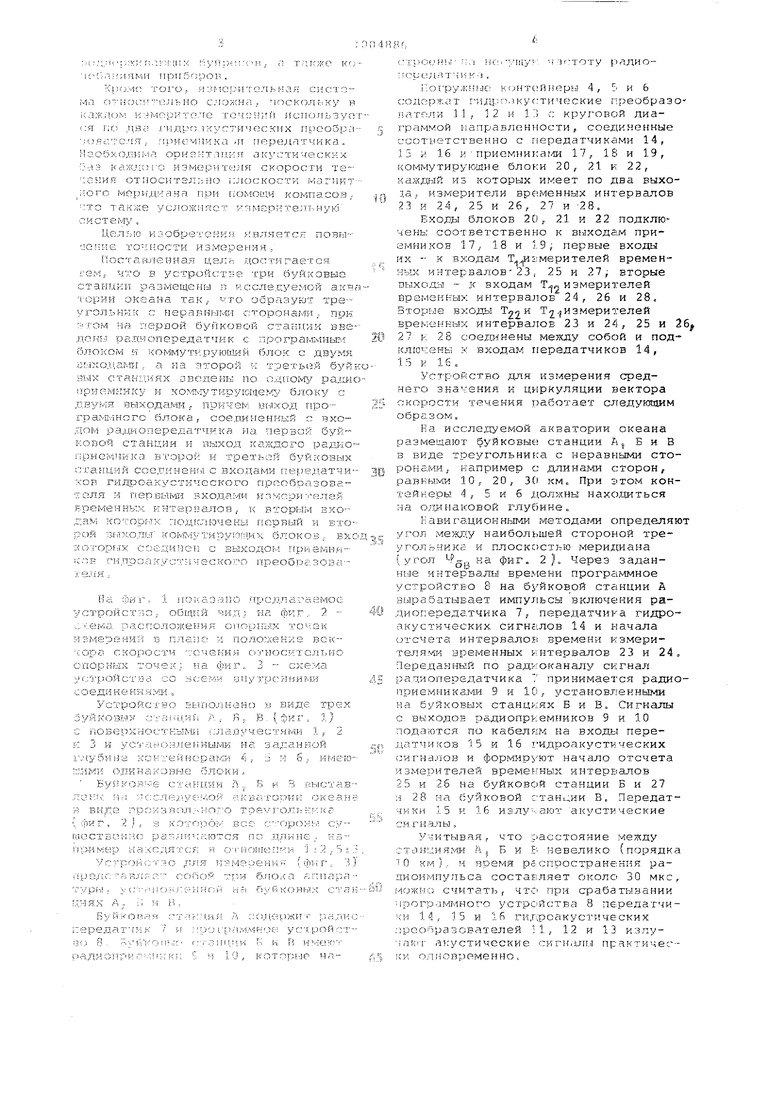
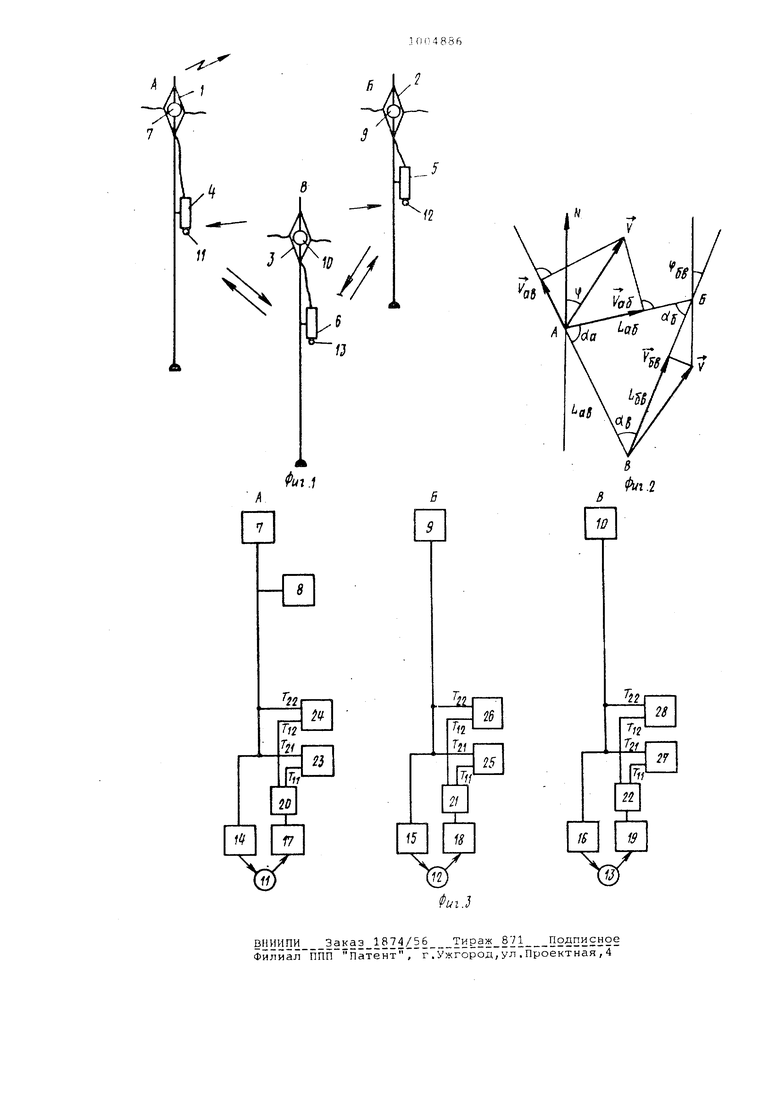
на iiffl 1Д 1 показапо предлагаемое устройство; общий чид ; на bv., 2 .;дема расположения опорпнх точ:ак ивмерйни в плапс ;-а долодекие век- :ора скорости о дюситсльгзо onOpHtzix точек; на фиг„ 3 - скема .|.)ойстаа со yc..-i ипутрсыними соедннения и „
Устройство Всдюлкено У виде трех Зуйковых araiii.nni Л: л,. В, (фиг-, 1/ с noБepxнocтг;ы йi iiJiajiyчестями 1, 2 к 3 и ;уС|аг1Очлег;ными на заданной
одинаковые блоки,
Буйков--е стащгии л„ Б и В иыставдоль: ь; с:сде1 у ; - ой лквагоотти океана в виде -ролзвол.люго трй/ч-одь; ;кка фиг, 2 ), 8 котором RCO c-()poHw су-мественяо рав.личаются по ддине - кзУо рг5й;::т о тдя T-i; MepeHvi ( л) iipejic аядг-С (::обой TsV блока аглтарл-Бункопая ста;-:л,ид Л аодержя ра,;лД-Х 1:ередатл:1К лоо граммно ; у см: рой 8 ЛччтУгомь;: сгопцли ь и И имек-т иадиодрИ а:.ч1д кк ь ч 10, которые чаCTpoetJbra.j лаг-тоту тдлнолср(:Дг1 к-i .
1огруж Г ЛС: контей1-;еры 4, ; и 6 с;одср пат гидрпакуг:тнческие преобразо в.ате.аи 11, 12 и 13 с круговой диа: граммой маправленности р соединенные соотнетотвенно с передатчиками 14, 13 и 16 И приемникаг-м 17, 18 и 19, коммутирующие блоки 20, 21 к 22, каждый из которых имеет по два выхоj-s Дй, изг- /ерители временных интервалов гзи 24, 25 и 26, 27 и 28.
Вхолр блоков 20, 21 и 22 подключены соответстБенно к выходам приемников 17,- 18 и 19, первые входы их - к входах-л Т 5г;мерителей времен яых интервалов-231 25 и 27, вторые выходы - к входам измерителей временвых интервалов 24, 26 и 28. Вторые входы Т22и Tj измерителей вре1-;енных интервалов 23 и 24, 25 и 26
У 27 к 28 соединены между собой и подключены к входам передатчиков 14, 15 и 16.
Устройство для измерения среднего значения к циркуляции вектора
5 скорости течения работает следующим образом.
Ra иссле1туемой акватории океана размещают буйковые станции А. Б и В в виде треугольника с неравными стоfi роками, например с длинами сторон, paBKhiivM 10, 20, 3(1 км. При этом контейнеры 4 , 5 и 6 должны находиться на одинаковой гдубине.
г:авнгационныг4и методами определяют
.- угол межл;у наибольшей стороной тре угольника и плоскостью мepи tиaнa (угол на фиг. 2 |. Через заданвые интервалы времени програмг ное устройство 8 на буйковой станции А вырабатывает импудьсы включения ра0 диопередатчика 7, передатчика гидроакустических сигнгшов 14 и начала отсчета интервалов времени измерителями временных интервалов 23 и 24, Переданный по рад :оканалу сигнал
S радиопередатчика 7 принимается радиоприемника1/ш 9 и 10, установленными на буйковых станциях Б и В. Сигналы с выходов радиоприемников 9 и 10 подакугся по кабелкм на входы переf датчиков 15 и 16 гидроакустических сигналов и формируют начало отсчета измерителей временных интерЕ;алов 25 и 26 на буйковой станции Б и 27 л 28 на бучЯковой стан1-,ии В, Передатчики 15 и 16 излу-ают акустические сигналы.
Учитывая что :расстояние между станциями и, Б и Е- невелико (порядка 10 км I, н время PCспространекня радиоимпульса составляет около 30 мкс,
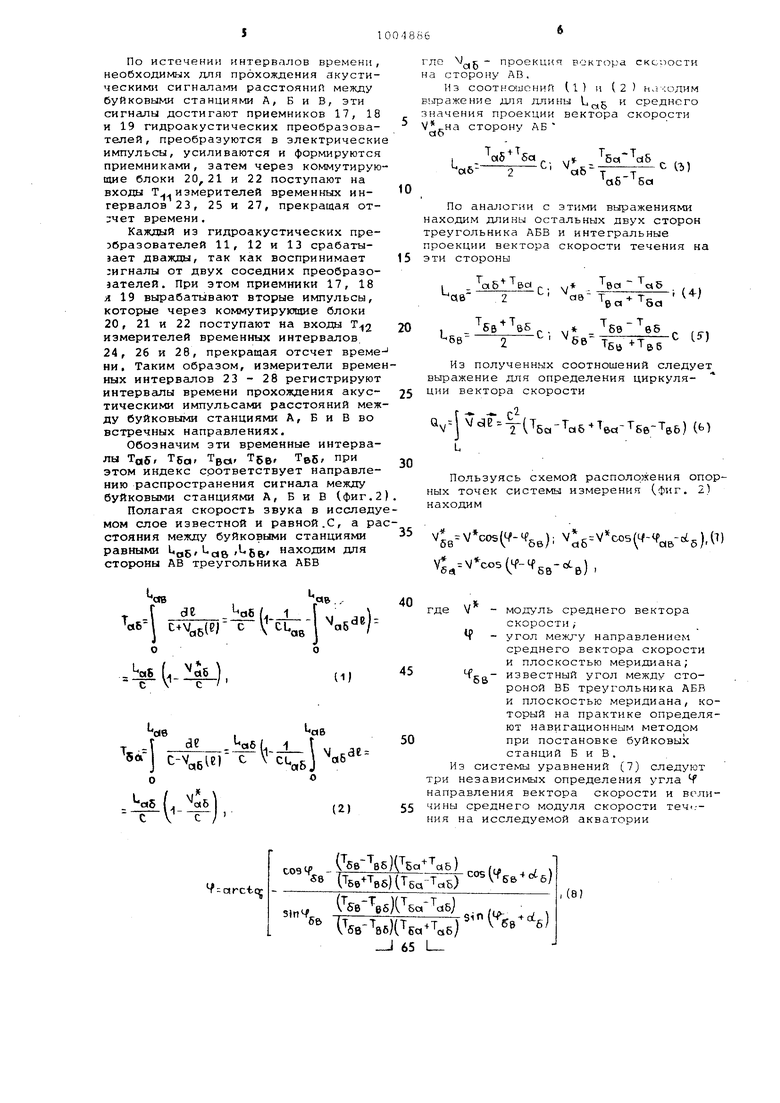
J считать, что при срабатывании программного устройства 8 передатчики 14, 15 и 16 гидроакустических преобразователей 11, 12 и 13 излучлкгг атгустические .1лы практичес% ки одновременно 1 По истечении интервалов времени, необходимых для прохождения акустическими сигналарли расстояний между буйковыми станциями А, Б и В, эти сигналы достигают приемников 17, 18 и 19 гидроакустических преобразователей, преобразуются в электрически импульсы, усиливаются и формируются приемниками, затем через коммутирую щие блоки 20,21 и 22 поступают на входы Т измерителей временных интервалов 23, 25 и 27, прекращая от::чет времени . Каждый из гидроакустических пре5бразователеЯ 11, 12 и 13 срабатыэает дважды, так как воспринимает сигналы от двух соседних преобразоэателей. При этом приемники 17, 18 л 19 вырабатывают вторые импульсы, которые через коммутирующие блоки 20, 21 и 22 поступают на входы измерителей временных интервалов 24, 26 и 28, прекращая отсчет време ни. Таким образом, измерители време ных интервалов 23 - 28 регистрируют интервалы времени прохождения акустическими импульсами расстояний меж ду буйковыми станциями А, Б и В во встречных направлениях. Обозначим эти временные интервалы Та5 Tgdf Тра, T5Bf ТвБ при этом индекс соответствует направлению распространения сигнала между буйковыми станциями А, Б и В (фиг,2 Полагая скорость звука в исследу мом слое известной и равной.С, а ра стояния между буйковыми станциями равными находим для стороны АВ треугольника АБВ ,., т de (. 1 .. «Ь c,s L «б) V с / WiUI -- т .Л de .Uc.6( -I ) V CU.J «6 0о ( (2 -С V
rogif fe-IeslilSoil a&l /,., «
«IWWT T;
(5e-Te5)(
зтч,
)()
(8
б)
J 65 L лс аб проекция воктсэра сксоости а сторону АВ, Из соотношониГ ll) и (2 ) находим ражение для длины и среднего начения проекции вектора скорости ,-Ha сторону АБ I . 5a ci& 0(6- 2 0(5 Т;:- а65с1 По аналогии с этими выражениями аходим длины остальных двух сторон реугольника АБВ и интегральные роекции вектора скорости течения на ти стороны I р , ., Всп «5 --ав- 2 - ав- Т„„+Т, IiBlVp. ., 50 вб -бв7 бе ТБЦ +Твб Из полученных соотношений следует ыражение для определения циркуляии вектора скорости --тС ба-Т б ва-Тбв-Т б) (fc) Пользуясь схемой располо.хения опорых точек CHCTefkffi измерения (фиг. 2) аходим V.(/-45); V g V c s c -V-cisl.n) ). среднего вектора скорости; угол межту направлением среднего вектора скорости и плоскостью меридиана; известный угол между стороной ВБ треугольника АБВ и плоскостью меридиана, который на практике определяют навигационным методом при постановке буйковых станций Б и В. истемы уравнений (7) следуют ависимых определения угла Ч ения вектора скорости и вс-лиеднего модуля скорости теч-.-исследуемой акватории
Н./-.)1Ш:-:-; -.--в) ,)
)
.. ( Гс,в),
56 В5Квс(+Т«В,
fr-тт 17т г-r5 v6B Bl
U68 T B5Ks«-ae
V.IMI
111
)
, 5а «5
V
Т5«-Т 5 соз(-,,dlg-circcosс/-,агссо5
19
(10)
. ,5
- )
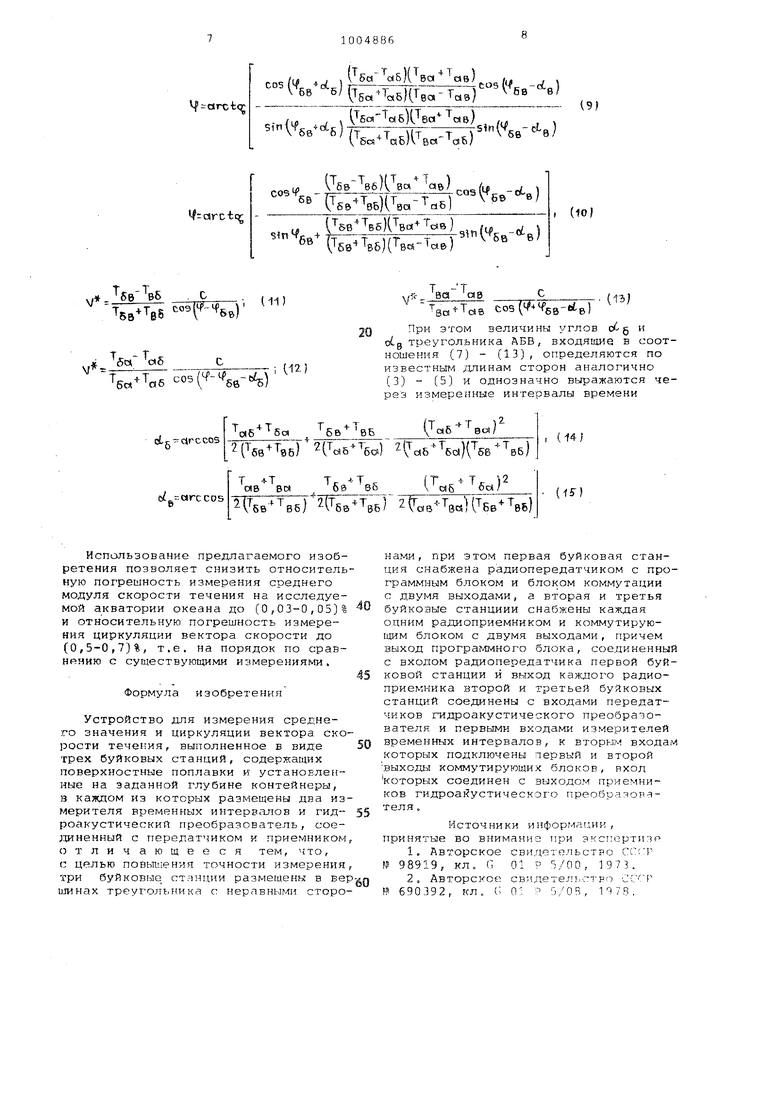
При этом величины углов dl-g и треугольника АБВ, входяшма в соотношения (7) - (13), определяются по известньп /1 длинам сторон аналогично ГЗ) - (5) и однозначно выражаются через измеренные интервалы времени
(141
)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения интегральной скорости течения | 1980 |
|
SU1084683A1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2010 |
|
RU2456644C2 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2012 |
|
RU2525644C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| Способ определения скорости морского подводного течения | 2016 |
|
RU2622460C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Способ определения опасности цунами | 2020 |
|
RU2738589C1 |
| Векторный автономный регистратор | 2023 |
|
RU2799973C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| Дрейфующая буйковая гидроакустическая станция для определения предвестников сильных землетрясений и цунами на акваториях с ледовым покровом | 2021 |
|
RU2770130C1 |
Использование предлагаемого изобретения позволяет снизить относительную погрешность измерения среднего модуля скорости течения на исследуемой акватории океана до (0,03-0,05)% и относительную погрешность изме реНИН циркуляции вектора скорости до (0,5-0,7)%, т.е. на порядок по сравнению с существуюгцими измерениями. Формула изобретения
Устройство для измерения среднего значения и циркуляции вектора, скорости , выполненное в виде грех буйковых станций, содержащих поверхностные поплавки и установленные на заданной глубине контейнеры, в каждом из которых размещены два измерителя временных интервалов и гидроакустический преобразователь, сое динeнный с передатчиком и приемником, {отличающееся тем, что, с целью повыи;ения точности измерения, три буйковые станции размещены в вер ил1нах треугольника с нерпвньлми сторонами, при это.м первая буйковая станция снабжена радиопередатчиком с программным блоком и блоком коммутации с двумя выходами, а вторая и третья буйковые станциии снабжены каждая одним радиоприемником и коммутирующим блоком с двумя выходами, причем выход nporpa№v Horo блока, соединенны с входом радиопередатчика первой буйковой станции и выход каждого радиоприемника второй и третьей буйковых станций соединены с входами передатчиков гидроакустического преобразовател5г и первыми входами измерителей временных интервалов, к вторым входа которых подключены первый и второй .выходьл коммутирующих блоков, вход которьлх соединен с выходом приемников гидроакустическогО преобразопателя.
Источники информаг.1ии , принятые во внимание Т1ри эксгпзртнзр
ui.1
