Изобретение относится к области морского приборостроения и может быть использовано при разработке и производстве технических средств измерений морских подводных течений.
Известны измерители течения, основанные на различных гидродинамических принципах, определяемых лагранжевым или эйлеровым подходами: в первом - отслеживается траектория движения части жидкости посредством дрейфующих буйков на небольшой глубине моря, при этом определяется осредненная за некоторое время скорость по пройденному буйком расстоянию, во втором - измеряется текущая скорость течения в данной фиксированной точке стационарными заякоренными буйками или буйковыми станциями.
Известны измерители течения, построенные на различных физико-технических принципах, например "Измеритель скорости подводных течений" (патент RU 2105985, опубл. 27.02.1998), "Волоконно-оптический измеритель полей скоростей морских течений" (патент RU 2105986, опубл. 27.02.1998), "Способ определения направления и скорости подводного течения" (патент RU 2238569, опубл. 20.10.2004) и другие.
Их общим основным недостатком является необходимость установки одного из датчиков приема или излучения физических полей на стационарных платформах, связанных с землей, либо на заякоренных объектах.
Точечные измерители стационарного типа - заякоренные буйки и буйковые станции - находят применение при измерении подводных течений, они характеризуются сложностью установки и обслуживания, к тому же на точность измерения существенное влияние оказывает подвижность на течении самих датчиков.
Таким образом, известные «точечные» методы измерения подводных течений, в том числе с бортов судов и ледоколов, а также дрейфующими станциями малопроизводительны и трудоемки. Тем не менее, они остаются востребованными и в настоящее время.
Известны и мобильные средства измерения, геомагнитные измерители течения, основанные на определении ЭДС, индуцируемой в буксируемом кабелем электроде. Они позволяют измерять составляющие вектора течения, обычно на ортогональных галсах. Однако эти измерители громоздки из-за протяженных кабелей с электродами, специальных лебедок с сопутствующими приборами, а также магнитометром геомагнитного поля, буксируемым в специальной гондоле. Так, в известном измерителе «ГМ-15» расстояние между электродами составляет порядка 100 м. Представляется очевидным, что использование геомагнитных измерителей не имеет практической перспективы для измерения морских подводных течений.
Определение скорости подводного течения принципиально возможно при одновременном использовании абсолютного и относительного лагов. Но известные гидроакустические лаги имеют ограничения работы на больших глубинах места, а также имеют зависимость от гидрологических факторов, например изменчивости скорости звука по времени, глубине и координате места в акватории.
Спутниковые навигационные системы характеризуются высокой точностью позиционных измерений, но их использование в подводном пространстве в настоящее время не имеет практического решения. Кроме того, работа приемников зависит от атмосферных условий и географических широт. Следует отметить, что «ГЛОНАСС» действительно предоставляет сведения о видимости и навигационной доступности данного географического места, однако высокие широты характерны частыми туманами и сплошной облачностью, а также недостаточным покрытием арктической зоны.
В основу изобретения поставлена техническая задача - разработка способа определения скорости морских подводных течений, характеризующегося работоспособностью на всех географических широтах, включая и арктическую акваторию, независимостью от глубин места и от внешних средств навигационной обсервации. Для решения поставленной задачи в предлагаемом изобретении используется подвижной подводный объект, маневрированием которого достигается получение информации о текущем значении скорости подводного течения по модулю и направлению.
В последние годы появился новый класс подводных подвижных систем - телеуправляемые подводные аппараты (ТПА) и автономные необитаемые подводные аппараты (АНПА). Эти аппараты программно-управляемы, с коррекцией параметров движения по гидроакустическому каналу, предназначены для выполнения обзорно поисковых и исследовательских работ. Они оснащены навигационной и специальной измерительной аппаратурой, в том числе и модульных конструкций, состоящих из функциональных систем и программных интерфейсов для интеграции и структурной реконфигурации в соответствии с выполняемыми задачами. Возможности и назначения подводных аппаратов (ПА) быстро растут в связи с ускоренным развитием микромеханической технологии. Из российских аппаратов можно отметить, например, разработку «Клавесин» (производства ООО «Тетис-Про»), а так же многофункциональный АНПА модульного исполнения «Гавиа» (производства «Института проблем морской технологии» Дальневосточного отделения РАН).
В ходе проведения поиска по патентной и научно-технической литературе не выявлен источник информации, который мог бы быть использован в качестве ближайшего аналога.
Технический результат, достигаемый при реализации разработанного технического решения, состоит в обеспечении возможности проведения измерений на любых географических широтах и глубинах акватории, включая и подводно-подледное пространство арктической акватории, высокую производительность при широкомасштабных исследованиях с покрытием больших площадей и различных глубин, при этом обеспечивается автономность и технико-экономическая эффективность, обусловленная исключением высокозатратных работ по производству, установке и обслуживанию заякоренных буйков и стационарных буйковых станций и внешних средств измерения и обсервации.
Первый вариант предлагаемого технического решения состоит в том, что на заданной глубине в режиме установившегося равномерного прямолинейного движения подводный объект совершает маневр в горизонтальной плоскости по скорости, при этом измеряют параметры установившегося движения - угол сноса на течении и алгебраическое значение его изменения до и после маневра и решают задачу определения вектора течения из двух или более навигационных треугольников скоростей, в которых течение предполагается неизменным. Действительно, навигационная классификация морских течений определяет: постоянные течения, а так же периодические и временные, периоды изменения которых несоизмеримы с временными интервалами маневра. Таким образом, можно полагать, что применительно к решаемой задаче скорость морских подводных течений носит стационарный характер и за период проведения отдельного маневра не обнаруживает существенных изменений.
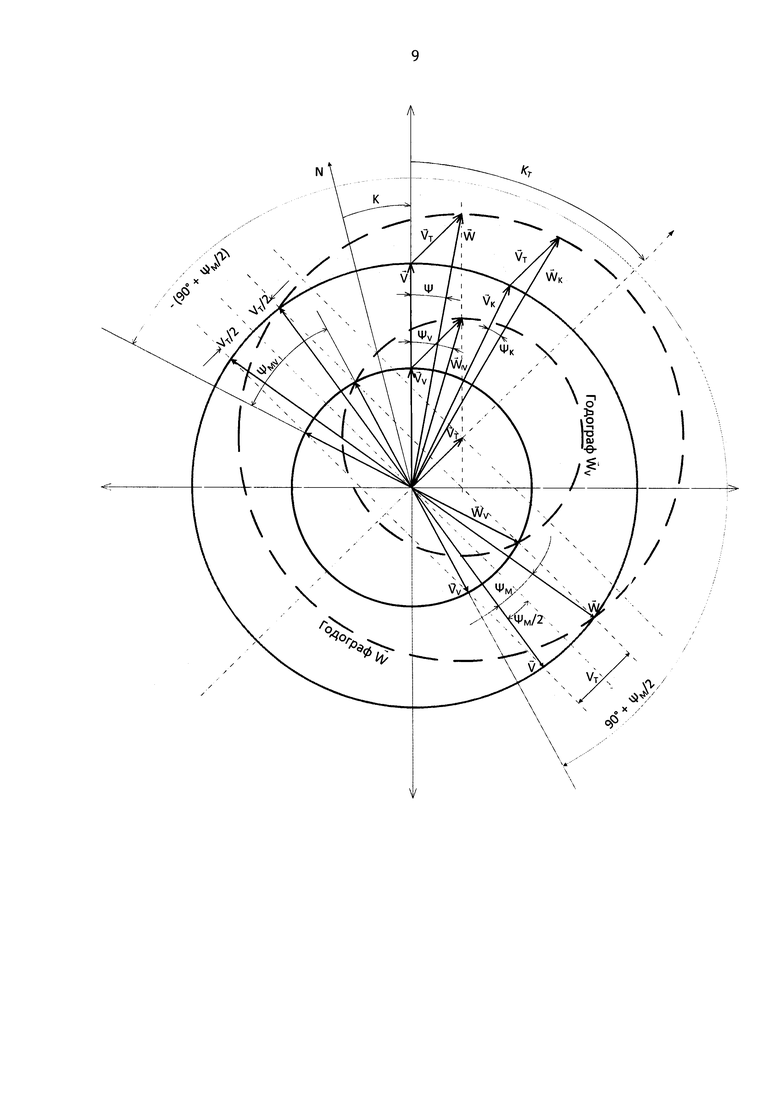
На чертеже приведены указанные треугольники скоростей, решения которых определяют алгоритмы вычисления параметров вектора течения, при этом приняты следующие обозначения:
V - относительная скорость подводного аппарата (ПА) в режиме установившегося равномерного прямолинейного движения до маневра.
VV, VK - относительная скорость ПА в режиме установившегося равномерного прямолинейного движения после маневра, соответственно, по скорости и курсу.
K, KK - курс ПА соответственно до и после маневра по курсу.
W - абсолютная скорость ПА до маневра.
WV, WK - абсолютная скорость после маневра соответственно по скорости и по курсу.
Ψ - угол сноса ПА на течении до маневра.
ΨV, ΨK - угол сноса ПА на течении после маневра соответственно по скорости и по курсу.
ΨM - максимальное значение угла сноса при заданной относительной скорости.
VI, KI - относительные скорость и курс при ΨM.
VT - скорость течения.
KT - направление вектора скорости течения относительно продольной оси ПА в полукруговом отсчете (0±180°).
Из двух треугольников векторов скоростей (V, W, VT) и (VV, WV, VT) определяются алгоритмы вычисления параметров вектора течения:
VT=(VSinΨ)/Sin(KT-Ψ)=(VVSinΨV)/Sin(KT-ΨV)
KT=arctg((V-VV)/(VctgΨV-VVctgΨ))
Другой вариант реализации изобретения состоит в том, что при маневрировании по курсу фиксируют направление вектора относительной скорости, когда приращение угла сноса Ψ изменяет алгебраический знак, а угол сноса принимает максимальное значение ΨM при заданной относительной скорости VI, и вычисляют величину и направление вектора скорости течения:
VT=2VISin(ΨM/2)
KT=±(90°+ΨM/2)
Осуществление изобретения и его практическое использование можно ожидать в следующих основных направлениях:
1. Непосредственное использование способа подводными подвижными объектами, оснащенными измерителем относительной скорости, системой курсоуказания и определения угла сноса для периодического измерения параметров вектора течения.
2. При широкомасштабных исследованиях, в частности подводно-подледного пространства арктической акватории:
2.1 Разработка и производство специализированного устройства подводных подвижных объектов и автономных необитаемых аппаратов.
2.2 Разработка и производство функционального модуля для реконфигурации подводных аппаратов модульной конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения и аэрометрический измеритель параметров ветра на борту самолета | 2016 |
|
RU2650415C1 |
| АРКТИЧЕСКАЯ ПОДВОДНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ И НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ НАВИГАЦИИ В СТЕСНЕННЫХ УСЛОВИЯХ ПЛАВАНИЯ | 2015 |
|
RU2596244C1 |
| Навигационная система маршрутного пилотирования летательных аппаратов в арктических акваториях | 2015 |
|
RU2612898C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛАГ КОМПЛЕКСНЫХ ИЗМЕРЕНИЙ | 2015 |
|
RU2589291C1 |
| Арктическая система вождения и навигационного обеспечения наземного транспорта | 2017 |
|
RU2652167C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛАГ-ДРЕЙФОМЕР | 2011 |
|
RU2503014C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2012 |
|
RU2525644C2 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2010 |
|
RU2456644C2 |
Изобретение относится к области морского приборостроения и может быть использовано при разработке и производстве технических средств измерений морских подводных течений. Технический результат – расширение функциональных возможностей. Сущность изобретения состоит в том, что равномерно прямолинейно двигающийся подводный аппарат на заданной глубине совершает маневр в горизонтальной плоскости по скорости, при этом измеряют относительную скорость, курс и угол сноса до и после маневра подводного аппарата и вычисляют параметры вектора течения. Другая сущность состоит в том, что при маневрировании по курсу фиксируют величину и направление относительной скорости, когда приращение угла сноса изменяет алгебраический знак, а угол сноса принимает максимальное значение, соответствующее величине относительной скорости, что определяет параметры вектора течения. Технический результат, достигаемый при реализации разработанного технического решения, состоит в обеспечении возможности проведения измерений на любых географических широтах и глубинах акватории, включая и подводно-подледное пространство арктической акватории, высокую производительность при широкомасштабных исследованиях с покрытием больших площадей и различных глубин, при этом обеспечиваются автономность и технико-экономическая эффективность, обусловленная исключением высокозатратных работ по производству, установке и обслуживанию заякоренных буйков и стационарных буйковых станций и внешних средств измерения и обсервации. 2 н.п. ф-лы, 1 ил.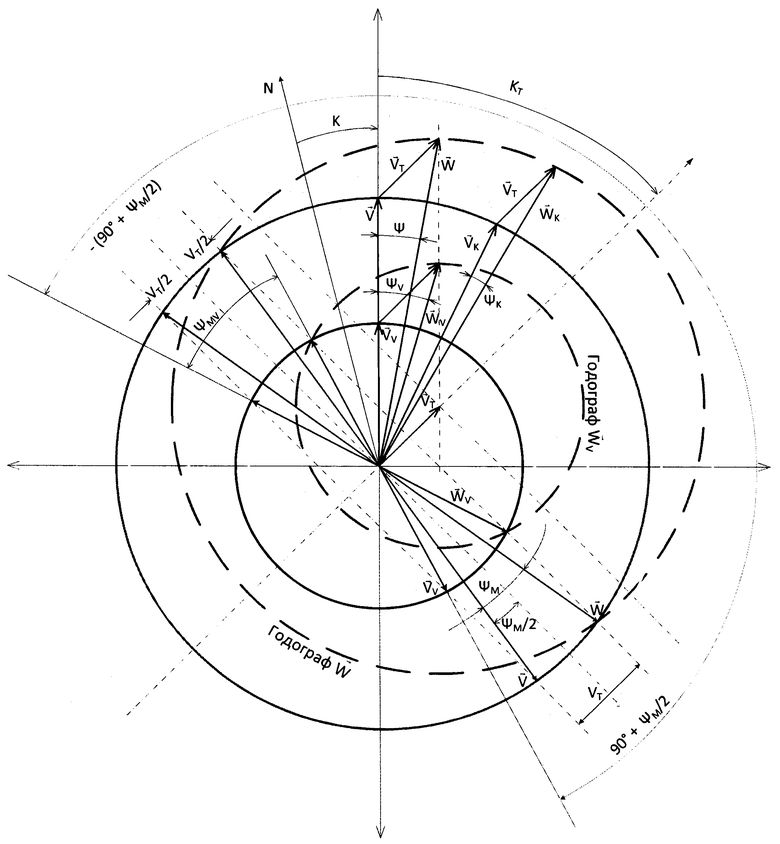
1. Способ определения скорости морского подводного течения, характеризуемый тем, что подводный аппарат в режиме установившегося равномерного прямолинейного движения совершает маневр в горизонтальной плоскости по скорости, при этом измеряют параметры установившегося движения - угол сноса на течении и алгебраическое значение его изменения до и после маневра, и рассчитывают скорость течения по величине и направлению из двух или более навигационных треугольников скоростей по алгоритмам:
VT=(VSinΨ)/Sin(KT-Ψ)=(VVSinΨV)/Sin(KT-ΨV),
KT=arctg((V-VV)/(VctgΨV-VVctgΨ)),
где VT - скорость течения,
V - относительная скорость подводного аппарата (ПА) в режиме установившегося равномерного прямолинейного движения до маневра,
Ψ - угол сноса ПА на течении до маневра,
KT - направление вектора скорости течения относительно продольной оси ПА в полукруговом отсчете (0±180°),
ΨV, - угол сноса ПА на течении после маневра по скорости,
VV, - относительная скорость ПА в режиме установившегося равномерного прямолинейного движения после маневра по скорости.
K, KK - курс ПА соответственно до и после маневра по курсу.
W - абсолютная скорость ПА до маневра.
WV, WK - абсолютная скорость после маневра соответственно по скорости и по курсу.
ΨV, ΨK - угол сноса ПА на течении после маневра соответственно по скорости и по курсу.
ΨM - максимальное значение угла сноса при заданной относительной скорости.
VI, KI - относительные скорость и курс при ΨM.
VT - скорость течения.
KT - направление вектора скорости течения относительно продольной оси ПА в полукруговом отсчете (0±180°).
2. Способ определения скорости морского подводного течения, характеризуемый тем, что подводный аппарат в режиме установившегося равномерного прямолинейного движения совершает маневр в горизонтальной плоскости по курсу, при этом определяют направление истинного движения, когда приращение угла сноса изменяет алгебраический знак, при котором на заданной относительной скорости VI угол сноса Ψ на течении принимает максимальное значение ΨМ, и вычисляют направление течения по алгоритмам:
VT=2VISin(ΨМ/2);
KТ=±(90°+ΨМ/2),
где VT - скорость течения,
KT - направление вектора скорости течения относительно продольной оси ПА в полукруговом отсчете (0±180°).
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ И СКОРОСТИ ПОДВОДНОГО ТЕЧЕНИЯ | 2002 |
|
RU2238569C2 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ПОДВОДНЫХ ТЕЧЕНИЙ | 1994 |
|
RU2105985C1 |
| Устройство для измерения направления и скорости подводного течения при буксировке, например, трала | 1973 |
|
SU670891A1 |
| US 4104912 А1, 08.08.1978 | |||
| US 4399695 А1, 23.08.1983. | |||

