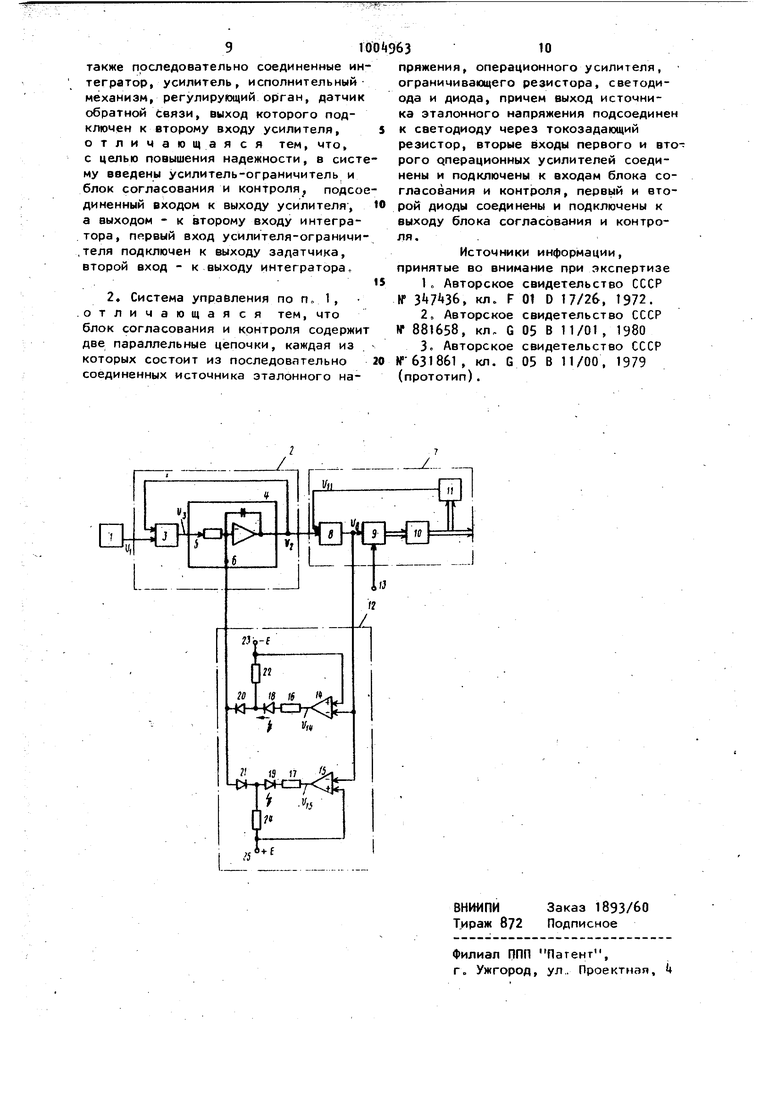
Изобретение относится к автоматике и предназначено для автоматического и дистанционного управления различными объектами, требующими ограничения скорости регулирующего органа и использующими для этого развертывающие устройства на входе следящей системы, управляющей регулирующим органом. Известна система регулирования тур бомашины, имеющая в своем составе последовательно соединенные задатчик и усилитель, который через исполнительное устройство связан с регулирующим органом, соединенным с датчиком обратной связи, подключенным к усилителю. В системе предусмотрен второй канал управления регулирующим органом посредством того же сервопривода, который в свою очередь через перею1ючающее устройство связан с последовательно соединенными задатчиком, электроприводом и сравнивающим устройством, на которое поступают сигналы, соответствующие давлению рабочей среды В первом и втором каналах управления D . Недостатком подобных систем является то, что второй канал-управления в них должен работать в горячем резерве. Кроме того, указанная система выполнена только применительно к гидравлическим системам управления, не содержащим в своем составе развертывающих устройств. Известна также система, содержащая канал автоматического управления, включающий в себя задатчик, датчик обратной связи и последовательно соединённые развертывающее устройство, усилитель, сервопривод, связанный с регулирующим органом, канал дистанционного управления, связанный с сервоприводом, а также переключатели сигналов задания, скорости развертки формирователь скорости развертки и реле времени. Благодаря введенным в систему переключателю сигнала задания, формирователю скорости разверт 310 ки и реле времени при включении раз . вергывающего устройства обеспечивается возможность быстрого нарастания его выходного сигнала до величины, соответствующей фактическому положению регулирующего органа. Поэтому при дистанционном управлении питание канала автоматического управления может быть отключено, что позволяет экономить ресурс аппаратуры, входящей в канал автоматического управления С 23. Недостатком этой системы является сложность перехода с дистанционного на автоматическое управление. Для ocy ществления такого перехода оператор должен включить переключатель сигналов задания, с помощью которого запус кается реле времени, обеспечивающее подключение сигнала обратной связи по положению регулирующего органа на вхо развертывающего устройства и переключение скорости развертки на необходимое время задержки Это требует значи тельного числа коммутирующих элементов снижающих надежность системы управлеНИЯ . ДругиМ существенным недостатком из вестной системы является то, что она не обеспечивает автоматического согла сования выходных сигналов развертывающего устройства и датчика положения регулирующего органа при заклинивании регулирующего органа. Действительно, если в процессе работы системы происходит временное заклинивание регули-. рующего орсан р то на выходах развертывающего устройства идatчикa положения регулирующего органа возникает рассогласование, которое приводит к быстрому перемещению регулирующего ор гана после устранения заклинивания Во многих случаях скорость перемещени регулирующего органа должна быть ограниченной и такое движение регулирующего органа недопустимо по условиям работы объекта (может приводить к воз никновению аварийных ситуаций). В результате снижается надежность управления объектом. Наиболее близкой по технической сущности к предложенной является система, содержаи4ая задатчик, а также последовательно соединенные интегратор, усилитель, исполнительный механизм, регулирующий орган и датчик обратной связи, примем выход датчика обратной связи подключен к второму входу усилителя С 31, 63 Недостатком данной системы является невозможность индикации заклинивания регулирующего органа, в связи с чем снижается надежность системы. Поставленная цель достигается тем, что в систему введены усилительограничитель и блок согласования и контроля, подсоединенный входом к выходу усилителя, а выходом - к второму входу интегратора, первый вход усилителя-ограничителя подключен к выходу задатчика, второй вход - к выходу ин тегратора. Кроме того, блок согласования и Контроля содержит две параллельные цепочки, каждая из которых состоит из последовательно соединенных источника эталонного напряжения, операционного усилителя, ограничивающего резистора, светодиода и диода, причем выход источника эталонного напряжения подсоединен к светодиоду через токозадающий резистор, вторые входы первого и второго операционйых усилителей соединены K подключены к входам блока согласования и контроля, первый и второй диоды соединены и подключены к выходу блока согласования и контроля. На чертеже представлена блок-схема предложенной системы. В состав схемы входят задатчик 1, развертывающее устройство 2, усилитель-ограничитель 3, интегратор 4 с основным 5 и дополнительным 6 входами, следящая система 7, усилитель 8, исполнительный механизм 9 регулирующий орган 10, датчик 11 обратной связи, блок 12 согласования и контроля, дополнительный вход 13 дистанционного управления, В состав ;;истемы дополнительно введены операционнь1е усилители Т и 15 с неинвертирующими + (первыми) и инвертирующими - (вторыми) входами и две цепи, соединяющие выходы операционных усилителей 1 и 15 с дополнительным входом 6 интегратора Ц, Эти цепи образованы последовательно соединенными резистором 16 (17) светодиодом 18 (19) и диодом 20(21). Светодиод 18, соединенный с диодом 20, через токозадающий резистор 22 подключен к источнику 23 запирающего напряжения смещения (-Е). Светодиод 19, соединенный с диодом 2|, подключен через другой токозадающий резистор 2Ц ко второму источнику 25 запирающего напряжения смещения (+Е). Источники 23 И 25 подключены к первым (неинвертирующим) входам операционных усилителей 1 и 15. Вторые входы операционных усилителей соединены с выходом усилителя 8.
Работа системы в режиме автоматического управления происходит следующим образом.
В исходном состоянии выходные напряжения задатчика 1 (V-), развертывающего устройства 2 (/2), датчика 11 положения (V равны нулю У(0 т.бо регулирующий орган находится в нулевом положении. При повороте задатчика 1 () на выходе развертывающего устройства 2 формируется напряжение Vn, изменяющееся с постоянной скоростью (скоростью развертки), определяемой отношением напряжения ограничения Vj на выходе усилителя-ограничителя 3 к постоянной интегрирования Т интегратора 4, так как при достаточно большом коэффициенте усиления усилителя 3 на вход 5 интегратора 4 поступает постоянное по величине напряжение V практически при любой отличной от нуля разности (). Следящая система 7 отрабатывает поступающее на ее вход напряжение Vo до тех пор, пока не будет достигнуто равенство
® ° выхода регулирующего органа в заданное положение
Поскольку скорость перемещения регулирующего органа при отсутствии ограничений существенно превышает скорость развертки, при надлежащем коэффициенте усиления усилителя 8 рассогласования регулирующий орган отслеживает сигнал /2 и в любой момент времени . По существу в процессе отработки задания выходное напряжение VQ усилителя рассогласования автоматически подбирается так что регулирующий орган перемещается со скоростью развертки. При этом напряжение VQ по абсолютной величине значительно меньше напряжений ис точников 23 и 25, т.е. -Е , а потому операционные усилители 1 и 15 находятся в состояниях, при которых светодиоды 18 и 19 смещены непроводящих направлениях и не светятся; Следовательно, цепи, соединяющие выходы операционных усилителей 1 и 15 с входом 6 интегратора k, разомкнуты. Действительно, при усилитель Т находится в области отрицательного насыщения и его выходное напряжение V).
Если обеспечивается , то меж- ду анодом и катодом сВетодиода 18 действует отрицательное напряжение, и светодиод 18 закрыт. При этом к аноду диода 20 приложено отрицательное напряжение -Е и диод 20 также закрыт (на катоде диода 20 действует практически нулевое напряжение суммирующей точки - входа 6 интегратора k), Аналогично при VgCE усилитель 15 смещаетЬя в область положительного насыщения и при сеетодиод 19 закрыт. Поэтому к Катоду диода 21 прикладывается положительное напряжение +Е, закрывающее этот диод„
Таким образом, в режим автоматического управления, когда следящая система 7 отрабатывает сигнал задания V со скоростью развертки, выход усилители 8 рассогласования отключен от дополнительного выхода 6 интв;ратора i,и введенный в систему контур, состоящий из операционных усилителей 14 и 15 и соответствующих цепей связи, не оказывает влияния на работу системы.
Если же в этом режиме происходит заклинивание регулирующего органа 10, то выходное напряжение усилителя 8 рассогласования возрастает и при ошибке IV2-V -| min имeeмlVв) Е. Величина минимальной ошибки Д,, при которой , определяется выражением Д
,где К - коэфmm к
8
фициент усиления усилителя 8 рассогласования ,
В зависимости от знака напряжения VQ замыкается одна из цепей связи, соединяющая выход усилителя 8 с входом 6 интегратора Ц. Так при VQ.O и VQ -Е на выходе операционного усилителя 14 появляется положительное напряжение которое при некоторой ошибке и j оказывается достточным для открывания светодиода 18 и диода 20, Величина ошибки Д может быть найдена по формуле
ih
R.6 л «о П
11 Ъ -14
ROO Ко К,
22
9 где R fR22
сопротивления резисторов 16 и 22;
Vn пороговое напряжение, определяемое суммой прямых падений на светодиоде 18 и диоде 20;
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления регулирующим органом | 1980 |
|
SU881658A1 |
| Система автоматического управления скоростью вращения ротора турбины | 1980 |
|
SU866247A2 |
| Аналого-цифровой интегратор | 1978 |
|
SU805345A1 |
| Устройство для контроля усилителей | 1979 |
|
SU868711A1 |
| Программная следящая система | 1981 |
|
SU1108394A1 |
| Программный регулятор | 1978 |
|
SU744468A1 |
| Следящая система | 1986 |
|
SU1564589A1 |
| Устройство для управления двигателем переменного тока | 1976 |
|
SU699645A1 |
| Следящая система | 1981 |
|
SU962847A1 |
| Стабилизатор переменного напряжения | 1982 |
|
SU1108409A1 |
