Изобретение относится к автоматическому управлению и может быть использовано в приводах промышленного оборудования, в частности в приводах роботов-манипуляторов.
Известна следящая система, содержащая последовательно соединенные задатчик, первый сумматор, усилитель, второй сумматор, исполнительный орган и блок обратной связи, выход которого соединен с вторым входом перво.го сумматора, выход которого через последовательно соединенные, интегратор и переключатель подключен к второму входу второго сумматора, а через двухполярный детектор к управляющему входу переключателя, второй сигнальный вход которого соединен с источником напряжения смещения 1 .
Недостатком данной системы является низкая точность.
Известна также следящая система, содержащая последовательно соединенные задатчик, первый сумматор, усилитель, второй сумматор, усилитель мощности, исполнительный механизм и блок обратной.связи, выход которого соединен с вторым входом первого сумматора, выход которого
через последовательно соединенные нелинейное корректирующее устройств во типа блока переменных коэффициентов и интегратор подключен к входу второго сумматора, причем управляющий вход нелинейного корректирую щего .устройства соединен с выходом блока изменения структуры, на входы которого подаются все измеряемые
10 сигналы системы 2 .
Недостатком указанной системы является низкая точность.
Наиболее близкой по технической
15 сущности к предлагаемой является сле дящая система, содержащая последовательно соединенные задатчик, первый сумматор, усилитель, второй сумматор, усилитель мощности релей20ного типа, исполнительный механизм и блок обратной связи, выход которого соединен С вторым входом первого сумматора, выход усилителя через последовательно соединенные нелиней25ное корректирующее устройство, интегратор и переключатель подключен к второму входу второго сумматора, управляющий вход переключателя соединен с выходом усилителя мощности
30
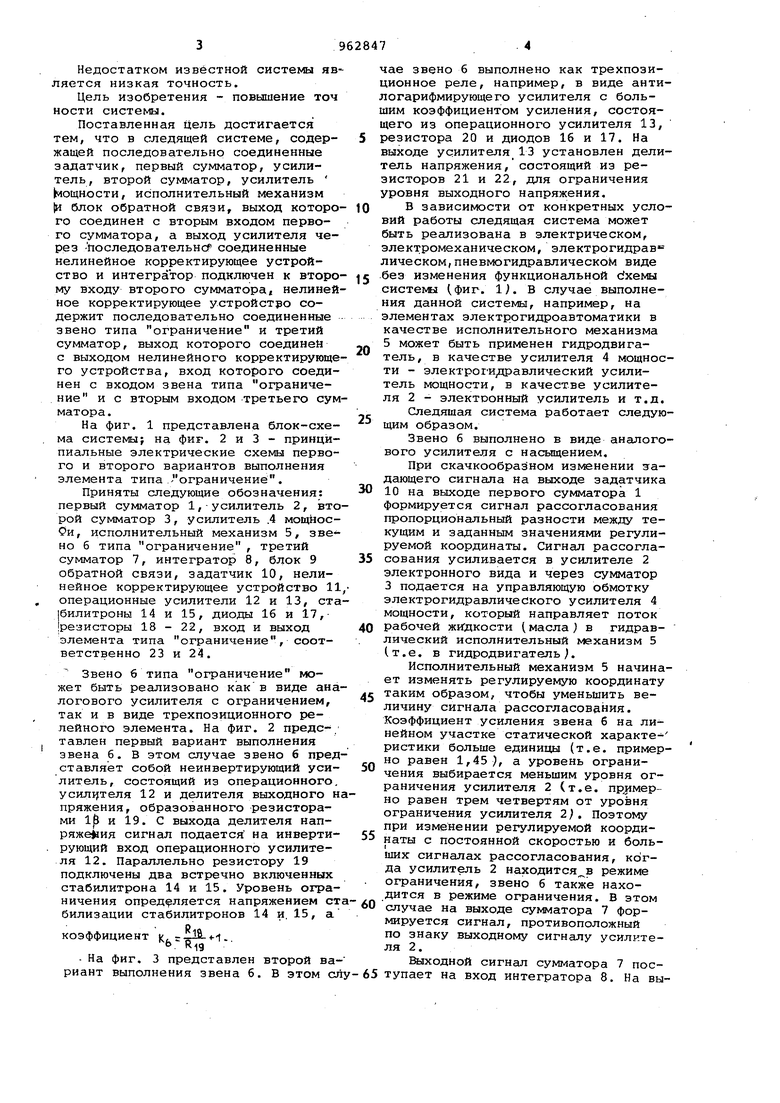
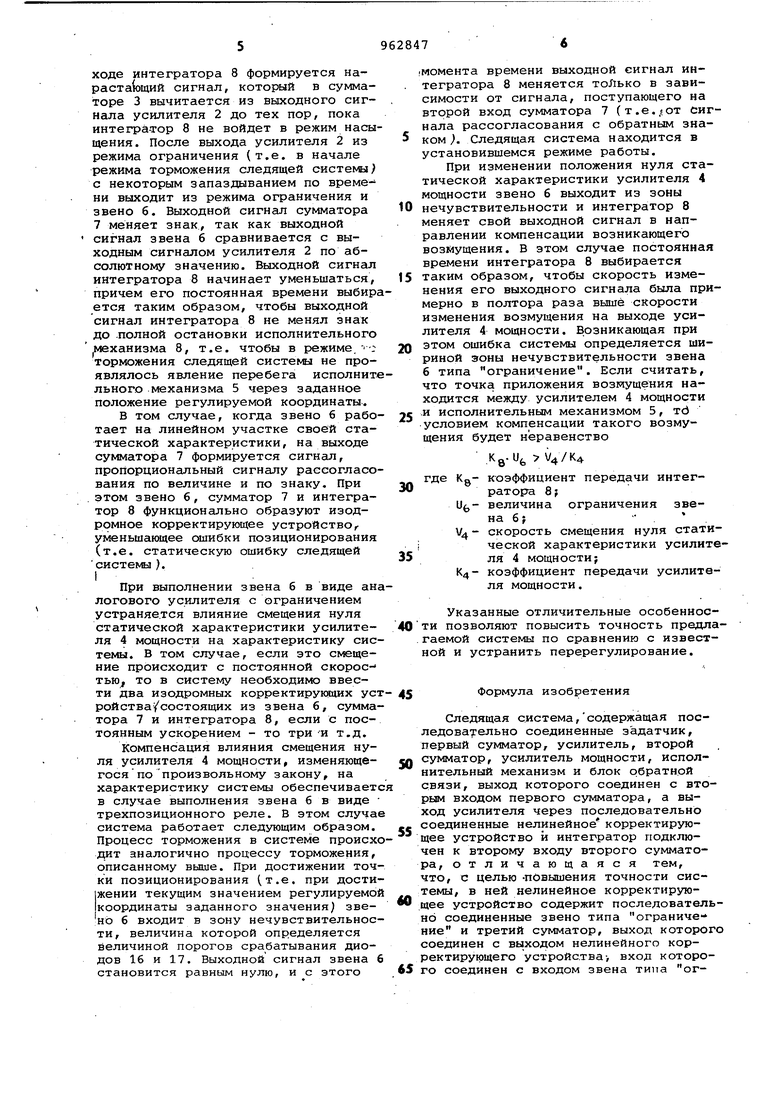
Сз 1. Недостатком известной системы яв ляется низкая точность. Цель изобретения - повышение точ ности системы. Поставленная цель достигается тем, что в следящей системе, содержащей последовательно соединенные задатчик, первый сумматор, усилитель, второй сумматор, усилитель Мощности, исполнительный механизм |и блок обратной связи, выход которо го соединен с вторым входом первого сумматора, а выход усилителя через -ПоследовательнсР соединенные нелинейное корректирующее устройство и интегратор подключен к второ му входу второго сумматора, нелиней ное корректирующее устройство содержит последовательно соединенные звено типа ограничение и третий сумматор, выход которого соединей с выходом нелинейного корректирующе го устройства, вход которого соединен с входом звена типа ограничение и с вторым входом третьего сум матора. На фиг. 1 представлена блок-схема системы; на фиг. 2 и 3 - принципиальные электрические схемы первого и второго вариантов выполнения элемента типа ограничение. Приняты следующие обозначения: первый сумматор 1,-усилитель 2, вто рой сумматор 3, усилитель .4 мощйосОи, исполнительный механизм 5, звено б типа ограничение , третий сумматор 7, интегратор 8, блок 9 обратной связи, задатчик 10, нелинейное корректирующее устройство 1 операционные усилители 12 и 13, ст |билитроны 14 и 15, диоды 16 и 17, резисторы 18 - 22, вход и выход элемента типа ограничение, соответственно 23 и 24. Звено 6 типа ограничение может быть реализовано как в виде ана логового усилителя с ограничением, так и в виде трехпозиционного репейного элемента. На фиг. 2 предетавлен первый вариант выполнения звена б. В этом случае звено 6 пред ставляет собой неинвертирующий усилитель, состоящий из операционного усил1;теля 12 и делителя выходного н пряжения, образованного резисторами Ij5 и 19. С выхода делителя напряже ия сигнал подается на инверти. рующий вход операционного усилителя 12. Параллельно резистору 19 подключены два встречно включенных стабилитрона 14 и 15. Уровень ограничения определяется напряжением ст билизации стабилитронов 14 и. 15, а коэффициент к - llU-t-f. - На фиг. 3 представлен второй ва риант выполнения звена 6. В этом с ае звено 6 выполнено как трехпозиионное реле, например, в виде антиогарифмирующего усилителя с больим коэффициентом усиления, состояего из операционного усилителя 13, езистора 20 и диодов 16 и 17. На выходе усилителя 13 установлен делиель напряжения, состоящий из резисторов 21 и 22, для ограничения ровня выходного напряжения. В зависимости от конкретных условий работы следящая система может быть реализована в электрическом, электромеханическом, электрогидрав ическом,пневмогидравлическоМ виде без изменения функциональной системы (,фиг. i). В случае выполнения данной системы, например, на элементах электрогидроавтоматики в качестве исполнительного механизма 5 может быть применен гидродвигатель, в качестве усилителя 4 мощности - электроги дравлический усилитель мощности, в качестве усилителя 2 - электронный усилитель и т.д. Следящая система работает следующим образом. Звено б выполнено в виде аналогового усилителя с насыщением. При скачкообразном изменении задающего сигнала на выходе задатчика 10 на выходе первого сумматора 1 формируется сигнал рассогласования пропорциональный разности между текущим и заданным значениями регулируемой координаты. Сигнал рассогласования усиливается в усилителе 2 электронного вида и через сумматор 3 подается на управляющую обмотку электрогидравлического усилителя 4 мощности, который направляет поток рабочей жидкости (масла ) в гидравлический исполнительный механизм 5 (т.е. в гидродвигатель К Исполнительный механизм 5 начинает изменять регулируемую координату таким образом, чтобы уменьшить величину сигнала рассогласования. Коэффициент усиления звена 6 на линейном участке статической характеристики больше единицы (т.е. примерно равен 1,45, а уровень ограничения выбирается меньшим уровня ограничения усилителя 2 (т.е. примерно равен трем четвертям от уровня ограничения усилителя 2). Поэтому при изменении регулируемой координаты с постоянной скоростью и больших сигналах рассогласования, когда усилитель 2 находится в режиме ограничения, звено б также находится в режиме ограничения. В этом случае на выходе сумматора 7 формируется сигнал, противоположный по знаку выходному сигналу усилителя 2 . исходной сигнал сумматора 7 поступает на вход интегратора 8. На выходе интегратора 8 формируется нарастаЬщий сигнал, который в сумматоре 3 вычитается из выходного сигнала усилителя 2 до тех пор, пока интегратор 8 не войдет в режим насы щения. После выхода усилителя 2 из режима ограничения (т.е. в начале режима торможения следящей системы с некоторым запаздыванием по времени выходит из режима ограничения и звено 6. Выходной сигнал сумматора 7 меняет знак, так как выходной сигнал звена 6 сравнивается с выходным сигналом усилителя 2 по абсолютному значению. Выходной сигнал интегратора 8 начинает уменьшаться, причем его постоянная времени выбир ется таким образом, чтобы выходной сигнал интегратора 8 не менял знак до .полной остановки исполнительного хаиизма 8, т.е. чтобы в режиме.--; торможения следящей системы не проявлялось явление перебега исполнит льного механизма 5 через заданное положение регулируемой координаты. В том случае, когда звено 6 рабо тает на линейном участке своей статической характеристики, на выходе сумматора 7 формируется сигнал, пропорциональный сигналу рассогласо вания по величине и по знаку. При . этом звено 6, сумматор 7 и интегратор 8 функционально образуют изодромное корректирующее устройство,уменьшающее ошибки позиционирования (т.е. статическую ошибку следящей системы ). При выполнении звена б в виде ан логового усилителя с ограничением устраняется влияние смещения нуля статической характеристики усилитеЛя 4 мощности на характеристику сис темы. В том случае, если это смещение происходит с постоянной скорое- тью то в систему необходимо ввести два изодромных корректирукнцих ус ройства/состоящих из звена 6, сумма тора 7 и интегратора 8, если с постоянным ускорением - то три -И т.д. Компенсация влияния смещения нуля усилителя 4 мощности, изменяющегосяпо произвольному закону, на характеристику системы обеспечивает в случае выполнения звена 6 в виде трехпозиционного реле. В этом случа система работает следующим образом. Процесс торможения в системе происх дит аналогично процессу торможения, описанному выше. При достижении точ ки позиционирования (т.е. при дости жении текущим значением регулируемо координаты заданного значения) звено 6 входит в зону нечувствительнос ти, величина которой определяется величиной порогов срабатывания диодов 16 и 17. Выходной сигнал звена 6 становится равным нулю, и с этого (Момента времени выходной сигнал интегратора 8 меняется тоЛько в зависимости от сигнала, поступающего на второй вход сумматора 7 (т.е..«от сигнала рассогласования с обратным знаком . Следящая система находится в установившемся режиме работы. При изменении положения нуля статической характеристики усилителя 4 мощности звено б выходит из зоны нечувствительности и интегратор 8 меняет свой выходной сигнал в направлении компенсации возникающего возмущения. В этом случае постоянная времени интегратора 8 выбирается таким образом, чтобы скорость изменения его выходного сигнала была примерно в полтора раза выше скорости изменения возмущения на выходе усилителя 4 мощности. Возникающая при этом ошибка системы определяется шириной зоны нечувствительности звена б типа ограничение. Если считать, что точка приложения возмущения находится между усилителем 4 мощности .и исполнительным механизмом 5, тс) условием компенсации такого возмущения будет неравенство Kg.U(, V47K4 где Kg- коэффициент передачи интегратора 8, величина ограничения звена 6 j скорость смещения нуля статической характеристики усилителя 4 МОЩНОСТИ; К4- коэффициент передачи усилителя мощности. Указанные отличительные особенности позволяют повысить точность предлагаемой системы по сравнению с известной и устранить перерегулирование. Формула изобретения Следящая система,содержащая последоват ельно соединенные задатчик, первый сумматор, усилитель, второй сумматор, усилитель мощности, исполнительный механизм и блок обратной связи, выход которого соединен с вторым входом первого сумматора, а выод усилителя через последовательно оединенные нелинейное корректируюее устройство и интегратор подклюен к второму входу второго сумматоа, отличающаяся тем, то, с целью -повышения точности сисемы, в ней нелинейное корректируюее устройство содержит последовательо соединенные звено типа ограниче- ие и третий сумматор, выход которого оединен с выходом нелинейного коректирующего устройства-, вход котороо соединен с входом звена типа ограничение и с вторым входом третьеi:o r VMMaTOpa.
Источники информации, принятые во внимание при экспертизе
1. Патент США 4029946, кл. 235-150.2, апублик. 1977.
2.Емельянов С.В. Системы автоматического управления с переменной структурой. М., Наука, 1967. с. 3941.
3.Авторское свидетельство СССР № 809058, кл. G 05 В 11/16, 1979
(прототип).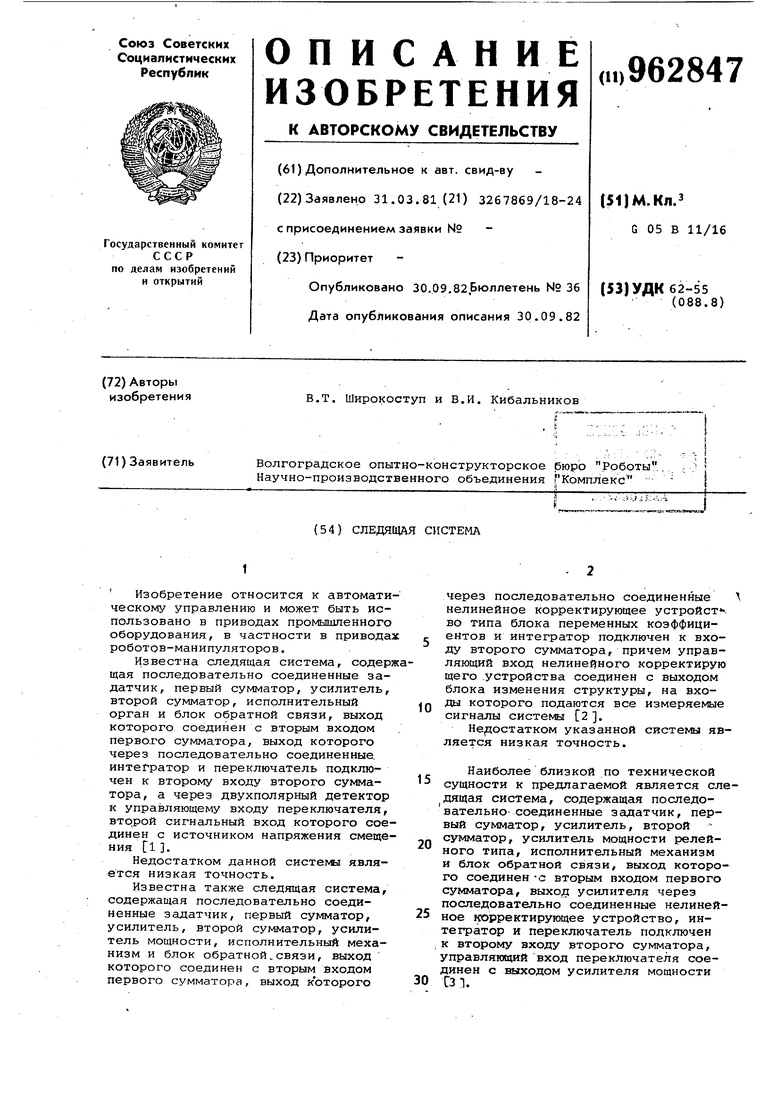
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Следящий пъезопривод с коррекцией неоднозначной статической характеристики | 1982 |
|
SU1120279A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Устройство для регулирования скоростидВигАТЕля | 1979 |
|
SU798748A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Нелинейный адаптивный регулятор | 1985 |
|
SU1303994A1 |
| Следящая система | 1985 |
|
SU1325402A1 |
-4н
//
фиг. У
2/
24
