Изобретение относится к приборостроению и может быть использовано в измерителях, например, напряжения.
Целью изобретения является уменьшение колебательности системы.
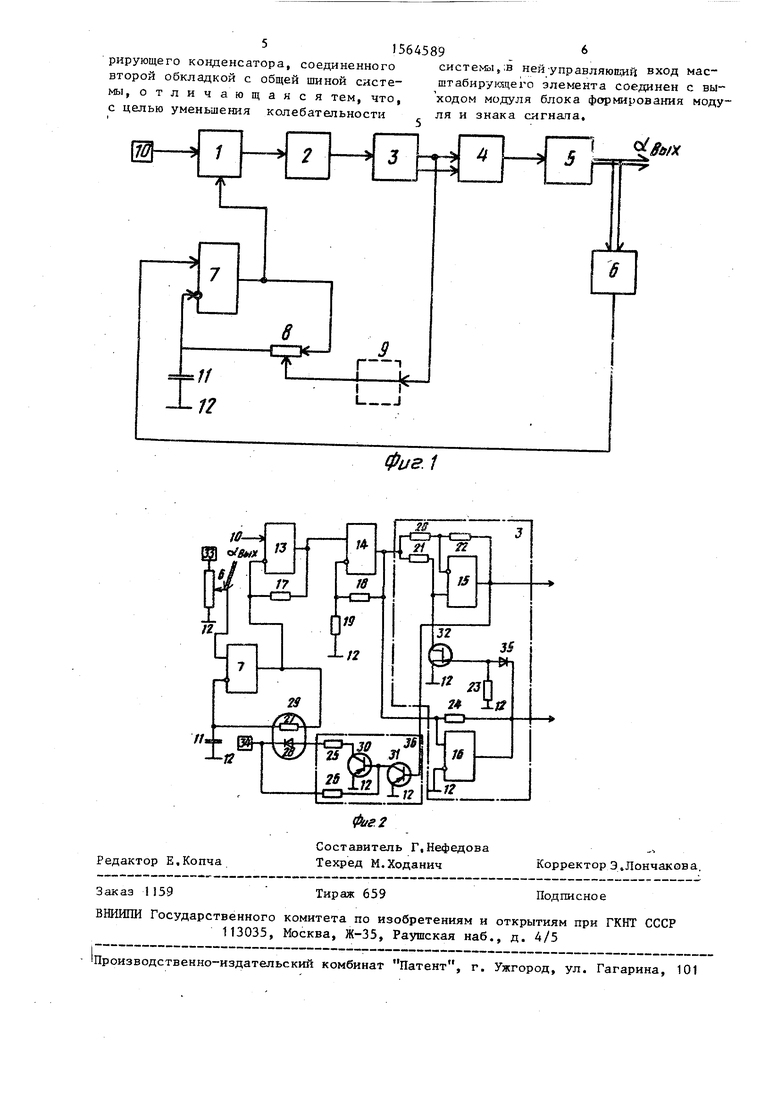
На фиг, 1 изображена функциональная схема системы; на фиг. 2 - принципиальные электрические схемы основных блоков системы, пример выполнения.
Следующая система содержит измери- . тель 1 рассогласования, усилитель 2, блок 3 формирования модуля и знака сигнала, усилитель 4 мощности, испол- штельный двигатель 5, датчик 6, опе- р ационный усилитель 7, масштабирующий элемент 8, согласующий блок 9, задатчик 10, интегрирующий конденсатор 11, общую шину 12, операционные усилители 13-16, резисторы 17-261, фоторезистор 27, свето- диод 28, - фоторезистивный оптрон 29, транзисторы 30-32 , источники 33 и 34 постоянного напряжения, диод 35, блок 36 управления питанием оптрона. Кроме того,
на фиг. 1 и 2 позициями обозначены U - выходной сигнал 1-го блока; U.f - сигнал на J-м выходе i-ro элемента; - выходной сигнал системы.
Блок 9 (см. фиг. 1) не выполняет в данной системе никаких функциональных преобразований сигначов, а служит в ней только для согласования входных и выходных конструктивных параметров блока 3 и масштабирующего элемента 8, и на функциональной схеме системы блок обозначен пунктиром, как блок, fie имеющий функционального назначения.
На модульном выходе блока 3 формируется сигнал, пропорциональный модулю регулирующего сигнала, а на знаковом выходе - сигнал (О или 1), отражающий знак регулируемого сигнала.
Коэффициент масштабирования масштабируемого элемента 8 изменяется в функции от модуля выходного сигнала блока 3, В качестве управляемого масштабируемого элемента 8 может быть приС/3
Јл
Ьэ
.Ј
сд
00
со
менен, например, фоторезистивный оп- трон 29, состоящий из фоторезистора 27 и светодиода 28 с блоком 36 управления питанием оптрона (см.фиг, 2),
В качестве дополнительного двигателя 5 в системе может быть использован, например, бесколлекторный исполнительный двигатель.
В качестве усилителя 4 мощности может быть использован, например, коммутатор цепей бесколлекторного двигателя с широтно-импульсным модулятором,
Система работает следующим образом,
При появлении на первом входе измерителя 1 рассогласования задающего напряжения U. на его выходе формируется напряжение рассогласования. Это напряжение усиливается усилителем 2 и поступает на вход блока 3, в котором операционный усилитель 16 охвачен положительной обратной связью, и при появлении на его входе напряжения разбаланса на его выходе практически мгновенно устанавливается соответст- венно положительное или отрицательное напряжение, равное его максимальному выходному напряжению. Этим напряжением через диод 35 управляется транзисторный ключ, реализованный на транзисторе 32, При положительном напряжении рассогласования, поступившем на вход блока 3, на выходе операционного усилителя 16 напряжение также положительно, диод 35 закрыт, а транзистор 32 открыт и шунтирует неинвертирующий вход операционного усилителя 15.
Напряжение рассогласования поступает при этом только на инвертирующий вход операционного усилителя 15. Резистор 22 в цепи его обратной связи выбран таким образом, что операционный усилитель 15 обеспечивает единичное усиление. Следовательно, на выхо- де операционного усилителя 15 появится напряжение рассогласования, имеющее отрицательную полярность. При отрицательном напряжении рассогласования на входе блока 3 диод 35 открыт, а транзистор 32 закрыт отрицательным напряжением, получаемым с выхода операционного усилителя 16,
Напряжение рассогласования в этом случае поступает на оба входа операционного усилителя 15, а напряжение
ивьо( на его выходе при этом будет равно напряженияю Uflx на его входе и также отрицательно, потому что
U
ёых
-u8r()+(-uex)
0
,
0 5
Q5
0
5
где -JU-1J
R/ и R0
v
- величины сопротивлений резисторов 20 и 22,
Полученное однополярное напряжение рассогласования поступает на входы широтно-импульсного преобразователя коммутатора 4, обеспечивающего работу исполнительного двигателя 5 со ско- , пропорциональной напряжению рассогласования и одновременно на вход блока 36 управления питанием оп- jrpoHa,
Блок 36 управления питанием оптрона обеспечивает прохождение максимального тока через светодиод 28 при минимальном напряжении рассогласования. Сопротивление фоторезистора 27 в этом случае будет минимальным, а постоянная времени интегрирующей цепи операционного усилителя 7 будет наименьшая,
По мере увеличения напряжения рассогласования ток через светодиод 28 будет уменьшаться, а сопротивление фоторезистора 27 возрастать и соответственно -увеличиваться постоянная времени интегрирующей цепи операционного усилителя 7, Изменение постоянной времени интегрирующей цепи операционного усилителя 7 приведет к изменению степени коррекции переходного процесса.
Таким обоазом, достигается коррекция переходного процесса, .пропорциональная величине рассогласования, с введением которой уменьшается динамическая ошибка системы, а переходный процесс в системе становится апериодическим при любых скачках входного сигнала, т.е. уменьшается колебательность системы,
Формула изобретения Следящая система, содержащая последовательно соединенные задатчик, измеритель рассогласования, усилитель, блок формирования модуля и знака сигнала, исполнительный двигатель и датчик , подключенный выходом к неинвертирующему входу операционного усилителя, соединенного выходом с вторым входом измерителя рассогласования и , с информационным входом масштабируемого элемента, подключенного выходом к инвертирующему входу операционного усилителя и к первой обкладке интег515645896
рирующего конденсатора, соединенногосистемы,в ней управляющий вход масвторой обкладкой с общей шиной системы, отличающаяся тем, что, с целью уменьшения колебательности
штабирукщего элемента соединен с вы ходом модуля блока формирования моду ля и знака сигнала.
системы,в ней управляющий вход масштабирукщего элемента соединен с вы- ходом модуля блока формирования модуля и знака сигнала.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления дуговой сваркой | 1987 |
|
SU1505705A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Операционный усилитель | 1978 |
|
SU746570A1 |
| Электрогидравлическая система | 1989 |
|
SU1714219A1 |
| Источник питания с защитой | 1977 |
|
SU696434A1 |
| Оптоэлектронное множительное устройство | 1974 |
|
SU489123A1 |
| Способ электропитания постоянного напряжения | 1978 |
|
SU742901A1 |
| Устройство для контроля положения стационарных плужковых сбрасывателей | 1990 |
|
SU1813686A1 |
| Многоканальный источник питания | 1982 |
|
SU1109723A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
Изобретение относится к приборостроению и может быть использовано в измерителях, например, напряжения. Целью изобретения является уменьшение колебательности системы. Поставленная цель достигается за счет того, что постоянная времени интегрирующей цепи главной обратной связи изменяется в зависимости от величины регулирующего сигнала. 2 ил.
фиг 2
Составитель Г.Нефедова Редактор Е.КопчаТехред М.ХоданичКорректор Э. Лончаков а.
Заказ 1159
Тираж 659
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фиг. 1
Подписное
| Следящая система | 1983 |
|
SU1142811A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система с нелинейной коррекцией | 1982 |
|
SU1049862A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Operating and service manual X-Y | |||
| Электромагнитный привод для буквопечатающих телеграфных аппаратов | 1926 |
|
SU7046A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
