Изобретение относится к автоматизации технологических процессов и предназначено, в частности, для автоматического удаления жидкости из конденсатосборников газовых сепараторов, работающих под давлением.
Известен пневматический регуля- тор уровня жидкости,. содержащий первое и второе трехмембранное реле, вход питания последнего из которых подключен к датчику давления, управляющая камера - к датчику минимальной величины, а выход - к одному из входов первого трехмбмбранного реле, соединенного своим выходом с управлякчч.им входом исполнительного механизма, и датчик максимальной величины 1.
Недостатком указанного регулятора является сложность конструкций, кроме того, наличие постоянного управляющего питания на исполнительном механизме не всегда рационально и эффективно. Это .связано с тем, что жидкость поступает в конденсатосборник сепараторов в небольших количествах, а перепады давления на регулирующих органах больше. Присутствие в жидкости абразивных материалов (песка, гематика и др.) выносимых
из скважин, ограничивает возможность применения нещзерывного регулирования, так как снижается время эксплуатации исполнительного механизма.
Наиболее близким по технической сущности к изобретению является пневматический регулятор уровня жидкости, содержЕцдий канал питания, датчик минимального и датчик максимального
to уровня с пневмовыходами, трехмембранное реле, имеющее камеры с нормально открытым и нормально закрытым соплами и расположенные между ними две глухие камеры, выход которого
15 соединен с входом исполнительного механизма, установленного в сливной магистрали емкости С 2.
Однако такой регулятор сложен конструктивно, не имеет режима руч20ной налсшки, датчик максимального уровня постоянно расходует воздух (энергоноситель), так как сопло этого датчика нормально открыто и эа.иакается только в момент поднятия
25 уровня жидкости до поплавка датчика
Цель изобретения - повывюние надежности регулятора.
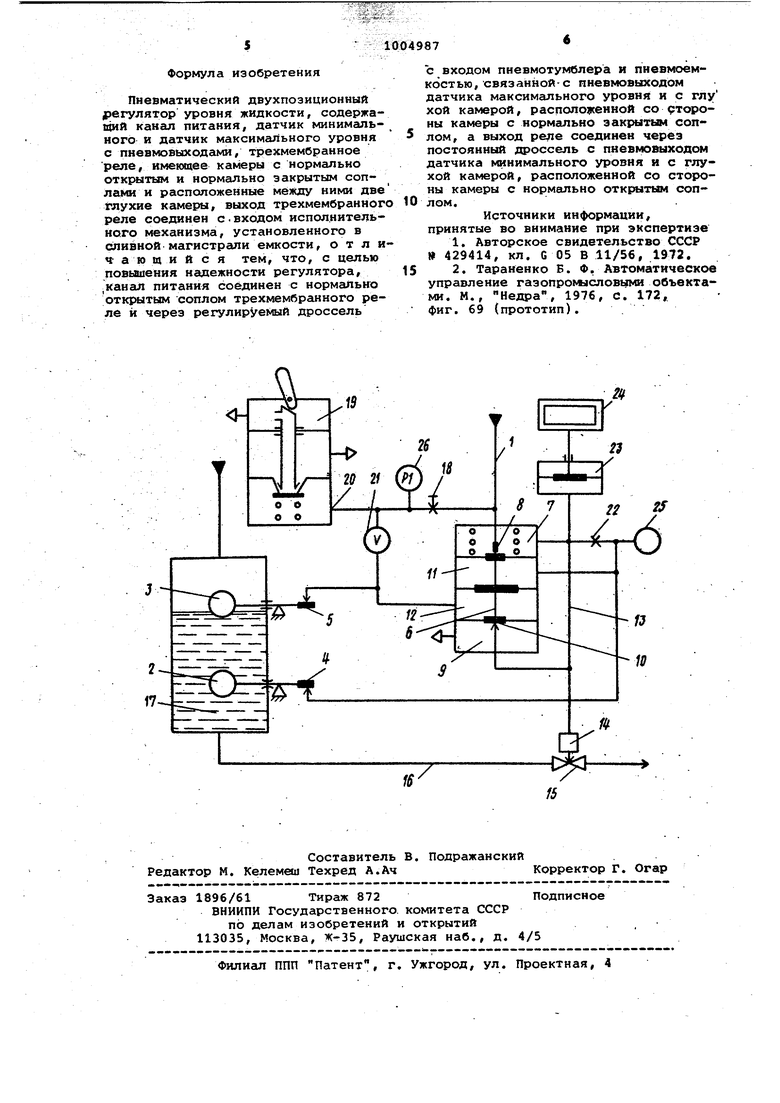
Поставленная цель достигается тем, что в пневматическом двухпози30ционном регуляторе уровня жидкости канал питания соединен с нормально открытЕлм соплом трехмембранного реле и через регулируеьый дроссель с входом пневмотумблера и пневмоемкостью, связанной с пневмовыходом датчика максимального уровня и с {глухой камерой, расположенной со ст роны камеры с нормально закрытым соплом, а выход реле соединен через постоянный.дроссель с пневмовыходом датчика минимального уровня и с глухой камерой, расположенной со стороны камеры с нормально открытым Соплом, На чертеже изображена схема пнев матического двухпоэиционного регуля тора уровня жидкости. Регулятор содержит канал 1 питания, датчик 2 минимального уровня и датчик 3 максимального уровня с пневмовыходами 4 и 5- соответственно, трехмембранное реле б, имеющее: камеру 7 с нормально открытым соплом 8 камеру 9 с нормально закрытым соплом 10, расположенную со стороны ка меры 7 глухую камеру 11, расположен ную со стороны камеры 9 глухую каме ру 12, и выход 13, соединенный с входом 14 исполнительного механизма 15, установленного в сливной магист рали 16 емкости 17, регулируе1 влй дроссель 18, пневмотумблер 19 с вхо дом 20, пневмоемкость 21, постоянны дроссель 22, мембранный привод 23, счетчик 24 импульсов и манометры 25 и 26. Устройство работает следующим образом. При подаче питания в камеру 7 открывается исполнительный механизм 15 установленный в сливной магистрали 16 емкости 17, срабатывает мембранный привод 23 счетчика 24 импульсов который производит отсчет срабатывания исполнительного механизма 15. Кроме того, через постоянный дроссель 22 питание подается в глухую камеру 11 этого же трехмембранного реле 6 к пневмовыходу 4 датчика 2 ми нимального уровня и к манометру 25, Одновременно нарастает давление в линии питания пневмовыхода 5 датчика 3 максимального уровня, которое конт ролируется манометрром 26, в глухой камере 12 трехмембранного реле 6 с задержкой по времени. Задержка по времени настраивается регулируемым дросселем 18 и пневмоемкостью 21. Исполнительный механизм 15 при этом открыт, так как давление в глухой камере 12 трехмембранного реле 6 не может преодолеть усилие пружины трехмембранного реле 6 и усилия, развиваемого давления питания датчика 3 минимального уровня в глухой камере 11 этого же реле. В таком состоянии регулятор уровня находится до срабатывания датчика 2 минимального уровня, при срабатывании котоpoio (что соответствует снижению уровня жидкости в емкости 17) открывается пневмовыход 4 и давление из глухой камеры 11 трехмембранного реле сбрасывается. Давление в глухой камере 12 реле б преодолевает усилие пружины, реле переключается и соединяет вход 14 исполнительного механизма 15 с атмосферой. Исполнительный механизм 15 закрывается. Уровень жидкости в емкости 17 повышается и при достижении уровня, при котором срабатывает датчик 2 минимального уровня, закрывается пневмовыход 4, но реле 6 не переключается, так как датчик 2 минимального уровня получает питание только во время работы исполнительного механизма 15. При дальнейшем повышении уровня жидкости срабатывает датчик 3 максимального уровня, открывая пневмовыход 5. Давление из пневмоемкости 21 и из глухой камеры 12 сбрасывается под действием пружины реле 6 переключателя и давление питания подается на вход 14 исполнительного механизма 15, который открывается , и цикл работы повторяется. Включение пневмотумблера 19 эквивалентно отк{м 1тию пневмовыхода 5 датчика 3 максимального уровня и ведет к срабатыванию исполнительного механизма 15 на открытие. Регулятор позволяет осуществить работу с любым одним датчиком уровня жидкости при выходе из строя второго датчика. При выходе из строя датчика 2 минимального уровня, его отключают от регулятора. При этом открытие исполнительного механизма 15 происходит от датчш а 3 максимального уровня, а закрытие исполнительного механизма происходит по истечению времени задержки настроенной на инерционном звене регулируемый дроссель 18 - пневмоемкость 21. При выходе из строя датчика 3 максимального уровня, его отключают, а линию питания закрывают заглушкой, открытие исполнительного механизма 15 производится пневмотумблером 19, а закрытие - от датчика 2 1иинимапьного уровня. При выходе из строя двух датчиков уровня управление осуществляется по месту или дистанционно включением пневмотумблера 19, а закрытие - по временной задержке, настроенной на регулируемом дросселе 18 и пневмоемкости 21. Такое резервирование весьма важно и полезно на объектах газовой промышленности , где длительное время (до полгода и более) не представляется возможным осуществлять ремонт датчиков, установленных в аппаратах при выходе их из строя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР УРОВНЯ | 1972 |
|
SU358684A1 |
| Пневматическое устройство управления расходом | 1981 |
|
SU1015345A2 |
| Устройство для создания пневмоперитонеума | 1980 |
|
SU889006A1 |
| Пробоотборник | 1978 |
|
SU763723A1 |
| Устройство для порционного дозирования жидкостей | 1980 |
|
SU1037076A1 |
| Пневматический плотномер жидкости | 1982 |
|
SU1062563A1 |
| Устройство для создания пневмоперитонеума | 1981 |
|
SU1007680A2 |
| Объемный насос-дозатор | 1977 |
|
SU734428A1 |
| УСТРОЙСТВО для НАГНЕТАНИЯ КРОВИ | 1973 |
|
SU364324A1 |
| Устройство для дозирования жидких продуктов | 1989 |
|
SU1688117A1 |
