Изобретение относится к автоматизации в черной металлургии и может быть использовано в системах управления и контроля положением кислородной фурмы.
Известно устройство для определеНИН высоты фурмы в конвертере, где касание штыря с уровнем металла фик. сируется по резонансу магнитопровода, который охватывает фурму l .
Недостатком этого устройства- является необходимость изоляции корпуса фурмы, что приводит к снижению ег надежности.
Наиболее близким к изобретению является устройство для установки высоты кислородной фурмы в конвертере, которое состоит из кислородной фурмы, в сопле которой размещен щуп конец которого через корпус фурмы последоватльно соединен с детектором касания щупа и измерительным при бором, фурма через привод соединена со счетчиком высоты фурмы и задатчиком 2 .
Недостатком известного, устройства является низкая точность измерения положения кислородной фурмы, поскольку тепловое удлинение элементов подвески (цепи, троса) приводит к неправильному измерению уровня металла и вследствие этого неправильной уста новке фурмы относительно уровня металла. ;
Целью изобретения является повышение точности контроля положения фурмы относительно поверхности металла на протяжении всего цикла продувки..Поставленная цель достигается тем, что в устройство, содержащее щуп датчик высоты фурмы, счетчик ;высоты фурмы, детектор касания щупа, включены блок управления, три блока синхронизации, блок формирования, сум матор, регистр, схему И излучатель и приемник ультразвука, детектор фиксации прекращения ультразвука, детек тор фиксации ультразвука, счетчик высоты щупа, датчик высоты щупа, вход которого соединен с осью привода щупа, а его выход через блок формирования соединен с первым входом первого блока синхронизации, другой вход которого соединен с первым выходом блока управления, а выход первого блока синхронизации соединен со счетным входом счетчика высоты щупа, а вход Сбросв нуль счетчика высоты щупа соединен с выходом |1етектора фиксации прекращения ультразвука, вход которого соединен с общей точкой, соединяющей выход приемника ультразвука и входдетектора фиксации ультразвука, а выход счетчика высоты щупа соединен с первым входом сумматора, другой вход которого соединен с вторым выходом блока управления, третий вход сумматора соединен с выходом счетчика высоты фурмы, а выход сумматора соединен с вх дом регистра, выход которого соедине с первым входом схемы И, другой вход которрй соединен с выходом второго блока синхронизации, первый вход которого соединен с третьим выходом блока управления, а второй вход второго блока синхронизации соединен с выходом детектора касания щупа, вход которого соединен с приводом щупа, а выход схемы И соединен с входом Ввод числа счетчика высоты фурмы, вход Запись числа которого соединен с выходом детектора фиксаци ультразвука, счетный вход счетчика высоты фурмы соединен с выходом третьего блока синхронизации, первый вход которого соединен с четвертым выходом блока управления, а второй вход третьего блока синхронизации соединен с выходом датчика -высоты фурмы, вход которого соединен с приводом фурмы.
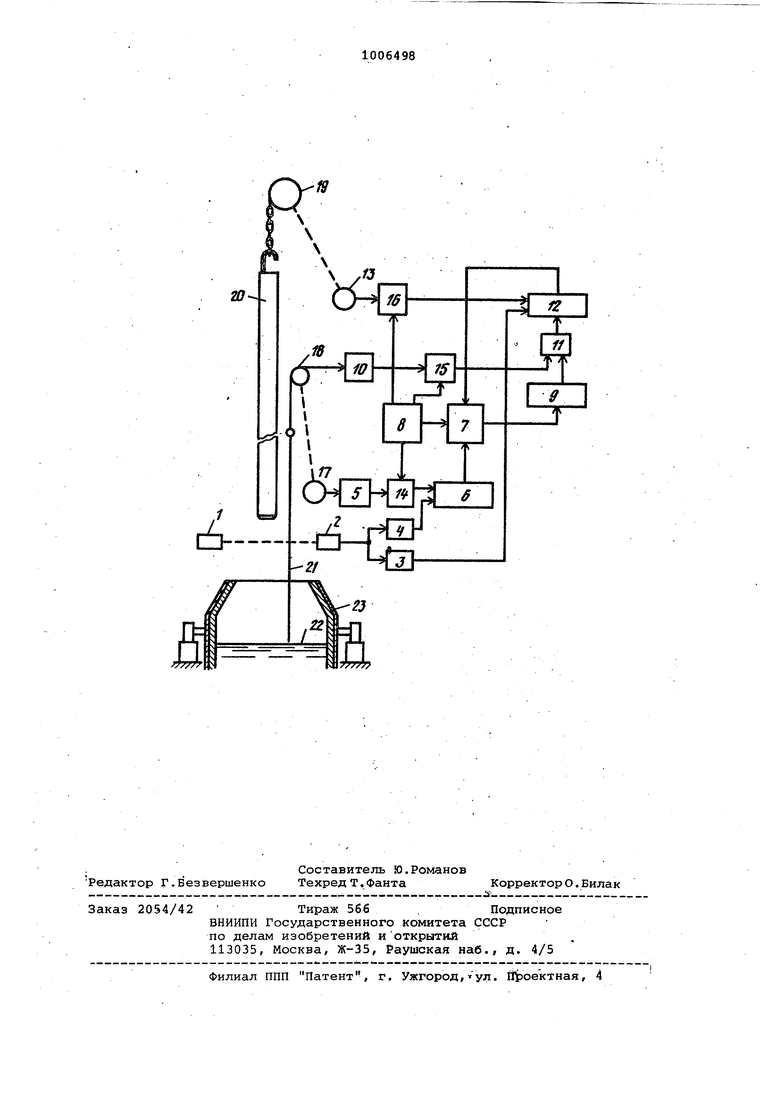
На чертеже представлена функциональная схема устройства.
Устройство для определения высоты фурмы в конвертере содержит излучатель 1 и приемник 2 ультразвука, детектор 3 фиксации ультразвука, детектор 4 фиксации прекращения ультразвука, блок 5 формирования, счетчик 6 высоты щупа, сумматор 7, блок управления, регистр 9, детектор 10 касания щупа, схему И 11, счетчик 12 высоты фурмы, датчик 13 высоты фурмы, три блока 14-16 синхронизации, датчик 17 высоты.щупа, вход которого соединен с осью привода 18 щупа, а его выход через блок 5,формирования соединен с первым входом первого блока 14 синхронизации, другой вход которого соединен с первым выходом блока 8 управления, а выход первого блока 14 синхронизации соединен с счетным входом счетчика 6 высоты щупа. Вход Сброс в нуль сче чика 6 соединен с выходом детектора 4 фиксации прекращения ультразвука, вход которого соединен с общей. точкой, соединяющей выход приемника 2 ультразвука и вход детектора 3 фиксации -ультразвука, а выход счетчика 6 соединен с первым .входом сумматора 7, другой вход которого соединен с вторым выходом блока 8 управрения. Третий вход сумматора 7 соединен с выходом счетчика 12 высоты .фурмы, а выход сумматора 7 соединен с входом регистра 9, выход которого соединен с первым входом схемы И 11, другой вход которой, соединен с выходом второго блока 15 синхронизации, первый вход которого соединен с третьим -вуходом блока 8 управления, а второй вход второго блока 15 синхронизации соединен с выходом детектора 10 касания щупа, вход которого соединен с осью привода 18 щупа Выход схемы И 11 соединен с входом Ввод числа счетчика 12 высоты фурмы, вход Запись числа которого соединена с выходом детектора 3 фикюадии ультразвука, а счетный вход счетчика 12 высоты фурмы соединен с выходом третьего блока 16 синхронизации, первый вход которого соединен с четвертым выходом блока 8 управления, а второй вход третьего блока 16 синхронизации соединен с выходом датчика 13 высоты фурмы, вход которого соединен с приводом 13 фурмы. Блок 5 формирования представляет собой два триггера Шмитта, которые формируют импульсы на перепадах на:пряжения (cинycoидej , которые поступают от датчика 17 высоты щупа , и логическую схему, позволяющую выделять на своем выходе только те импульсы, которые соответствуют переме щению щупа 21 только вниз. Это необ ходимо для того, чтобы исключить по счет импульсов счетчиком 6 высоты щупа при перемещении щупа 21 вверх, что в свою очередь повышает надежность работы устройства. Блок 8 управления состоит из ген ратора импульсов и делителя частоты которые необходимы для разделения во времени операции сложения в сумматоре 7, подсчета импульсов в.счет чике.. 12 высоты фурмы, в сзчетчике 6 высоты щупа и перезаписи результат суммирования из регистра 9 в счётчик 12 высоты фурмы. Устройство работает следующим об разом. Команда на .выполнение измерения высоты фурмы 20 происходит путем вк чения излучателя 1 и приемника 2 ультразвука, которые размещены над конвертором 23 в безопасной зоне от факела конвертера в так называемой базовой зоне-. Излучатель 1 создае направленный поток ультразвука в на правлении приемника 2 ультразвука. Они расположены таким образом, что фурма 20 и щуп 21 при перемещении м гут перекрывать ультразвуковой поток . В момент подачи команды на измер ние высоты фурмы 20 относительно уровня металла 22, фурма 20 может находиться выше базовой зоны или ;ниже ее. В первом случае фурму 20 необходимо ввести в зону, чтобы счетчик 12 высоты фурмы сбросиЛся в нуль и поднять ее вверх. В другом случае (фурма 20 находится ниже ба ) ее необходимо только прднять выше базовой зоны. В том и другом случае щуп 21 находится над базовой зоной. . Началом измерения является перемещение фурмы 20 вверх, конец которой, пройдя базовую зону (уровень размещения излучателя 1 и приемника 2 ультразвука) открывает поток ультразвука, который поступает на вход приемника 2 ультразвука. Сигнал с выхода приемника 2 ультразвука поступает на вход детектора 3 фиксации ультразвука, который фиксирует момент поступления yJibTpassyкового потока и сбрасывает счетчик 12 высоты фурмы в нуль. При дальнейшем подъеме фурмы 20 счетчик 12 высоты фурмы начинает отсчет положения фурмы 20 от базового уровня размещения излучателя 1 и. приемника 2 ультразвука. Далее фурма 20 может быть остановлена в любом месте или продолжать свое движение. После пересечения фурмой 20 базового уровня шуп 21 начинает опускаться. При пересечении щyпcяv 21 базового уровня размещения излучателя 1 и | приемника 2 ультразвука сигнал от приемника 2 ультразвука фиксируется детектором 4 прекращения ультразвука, который в этот момент сбрасывает счетчик 6 высоты щупа в нуль и при дальнейшем опускании щупа 21 счетчик.б начинает производить отсчет перемещения щупа 21 вниз. Коды положения фур1-и 20, со счетчика 12 высоты фурмы и высоты щупа 21 со счетчика 6 поступают на входы сумматора 7, где происходит их суммирование в интервале одного, дискретного перемещения фурмы 20 и щупа 21. Это необходимо, чтобы не было потери инфор ации, вызванной изменением скорости перемещения фурмы 20 и щупа 21.. В момент касания щупа 21 с поверхностью жидкого металла 22 детектор 10, касания щупа выдает сигнал, с помощью которого результат сложения в сумматоре 7, который хранится в регистре9, через схему Н 11 переписывается ,в рчетчик 12 вцсоты фурмы. Результат вычислений сумматора 7 .(в момент касания щупа 21 поверхнос-,ти жидкого металла 22 в конвертере 2 будет точным положением фурмы 20 над. уровнем металла 22. Измерение в период плавки необходимо из-за -растяжения троса (цепи) подвески фурмы, а также вследствие изменения самого уровня жидкого металла 22 в период продувки. Использование изобретения обеспечивает увеличение выхода годного металла вследствие сокращения времени продувки жидкого металла и снижения количества выбросов.
w
й---..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения высоты фурмы в конвертере | 1985 |
|
SU1245598A1 |
| Устройство для контроля процесса шлакообразования в конвертере | 1990 |
|
SU1710580A1 |
| Устройство для контроля процесса шлакообразования в конверторе | 1988 |
|
SU1581749A1 |
| Устройство для контроля кислородно-конвертерного процесса | 1985 |
|
SU1364640A1 |
| Устройство для контроля положения кислородной фурмы | 1990 |
|
SU1696487A1 |
| Устройство для определения содержания углерода в металле | 1991 |
|
SU1781307A1 |
| Устройство контроля уровня ванны в конвертере во время продувки | 1981 |
|
SU973625A1 |
| Устройство для сортировки деталей на конвейере по типоразмеру | 1985 |
|
SU1319932A1 |
| Устройство для считывания графической информации | 1979 |
|
SU877584A1 |
| Устройство контроля температуры металла в конверторе | 1980 |
|
SU1073290A1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ФУРМЫ В КОНВЕРТЕРЕ, содержащее щуп, датчик высоты фурмы, счетчик /высоты .фурмы, детектор касания щупа 1C расплавом, отличающееся тем, что, с целью повышения точности измерения положения кислородной фур-мы над поверхностью жидкого метал,ла, оно содержит блок управления, j три блока синхронизации, блок формирования, сумматор, регистр, схему И, излучатель и приемник ультразвука, два детектора,счетчик высоты щупа, датчик высоты щупа, вход которого соединен с осью привода щупа, а его выход через блок формирования соединен с первым входом первого блока синхронизации, другой вход которого соединен с первым выходом блока управления, а выход первого блока элемента синхронизации соединен со счетным входом счетчика высоты щу- i ;па, вход Сброс в нуль счетчика вы-. , соты щупа соединен с выходом детектора фиксации прекращения ультраj звука,- вход которого соединен с рбГщей точк.ой, соединяющей выход при- емника ультразвука и вход детектора фиксации ультразвука, а выход счетчика высоты щупа соединен с первым входом сумматора, другой вход которого соединен с вторым выходом блока управления, третий .вход сумматора соединен с выходом счетчика высоты фурмы, а выход сумматора соединен с входом регистрам, выход которого соединен с первым входом схемы И, другой вход которой соединен с выходом второго блока синхронизации, первый вход которого соединен с третьим выходом блока управления, , (Л а второй вход второго блока синхронизации соединен с выходом детектора касания щупа, вход которого соедивен с приводом щупа, а выход схемы И соединен с входом Ввод числа счетчика высоты фурмы, вход Запись числа которого соединен С выходе детектора фиксации ультра}звука, счетный вход счетчика, высоты фурмы соединен с выходом третьего .блока синхронизации, первый вход которого соединен с четвертым выходом ot блока управления, а второй вход третьего блока синхронизации соединен 4:2 с выходом датчика высоты ф.урмы, вход со которого соединен с пр иводом фуроо мы.