Изобретение относится к черной металлургии, конкретнее к получению стали в кис- лородных конвертерах, и может быть использовано для контроля положения продувочных кислородных фурм.
Целью изобретения является повышение точности и надежности контроля положения кислородной фурмы относительно уровня спокойного металла.
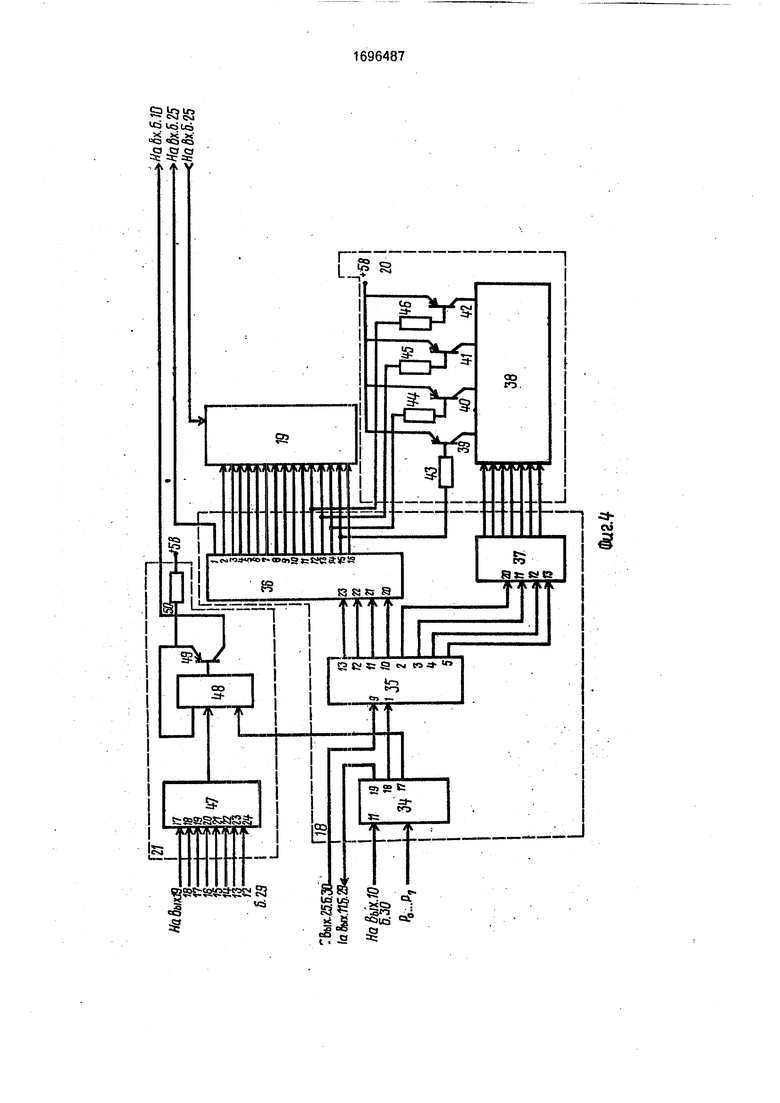
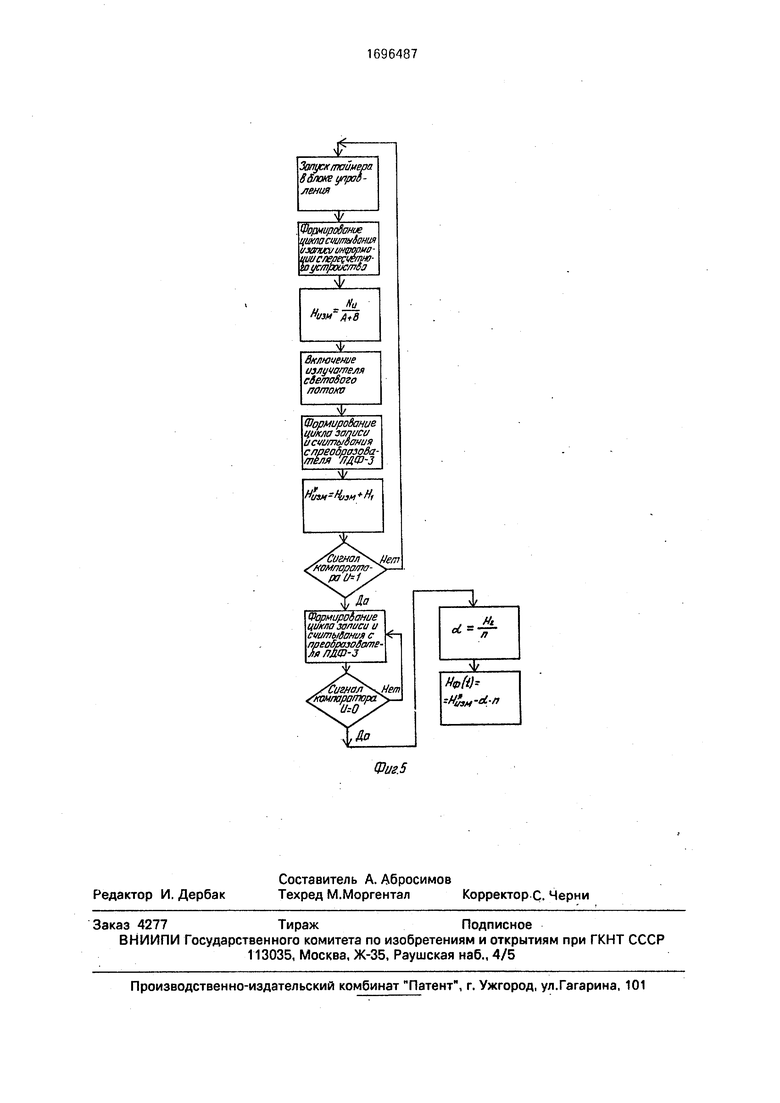
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - блок-схема микропроцессорного блока; на фиг. 3 - внутренняя структура блока гальванической развязки, блока интерфейса, последовательного блока обработки информации; на фиг. 4 - внутренняя структура блока дешифрации, блока индикации, цифроаналогового преобразователя; на фиг. 5 - блок-схема алгоритма работы устройства.
Устройство содержит (фиг. 1) преобразователь 1 угловой скорости вращения привода фурмы в частоту импульсов, первый выход которого соединен с первым входом микропроцессорного блока 2, а второй выход соединен с вторым входом микропроцессорного блока 2, блок 3 управления, первый выход которого соединен с входом излучателя 4 светового потока, приемник 5, выход которого соединен с входом компаратора б, а выход компаратора б соединен с
О
ю
ON
4 00 V4
третьим входом микропроцессорного блока 2, сцинтилляционный детектор 7, вход которого соединен с вторым выходом блока 3 управления, контейнер-коллиматор 8 с источником и затвором, вход которого соеди- нен также с вторым выходом блока 3 управления,пересчетное устройство 9, вход которого соединен с выходом сцинтилляци- онного детектора 7Ча выход - с четвертым входом микр%ЙрШ|ес с1)рнопо блока 2, реги- стрирую.щдОйЧГфибор , 1-0, вход которого соединен с выходом микропроцессорного блока 2, барабан 11, канат 12 и кислородную фурму 13. Кроме того на фиг. 1 условно показан уровень 14 спокойного металла.
Преобразователь 1 угловой скорости вращения привода фурмы в частоту импульсов может быть представлен в виде унифицированного преобразователя ПДФ-3,
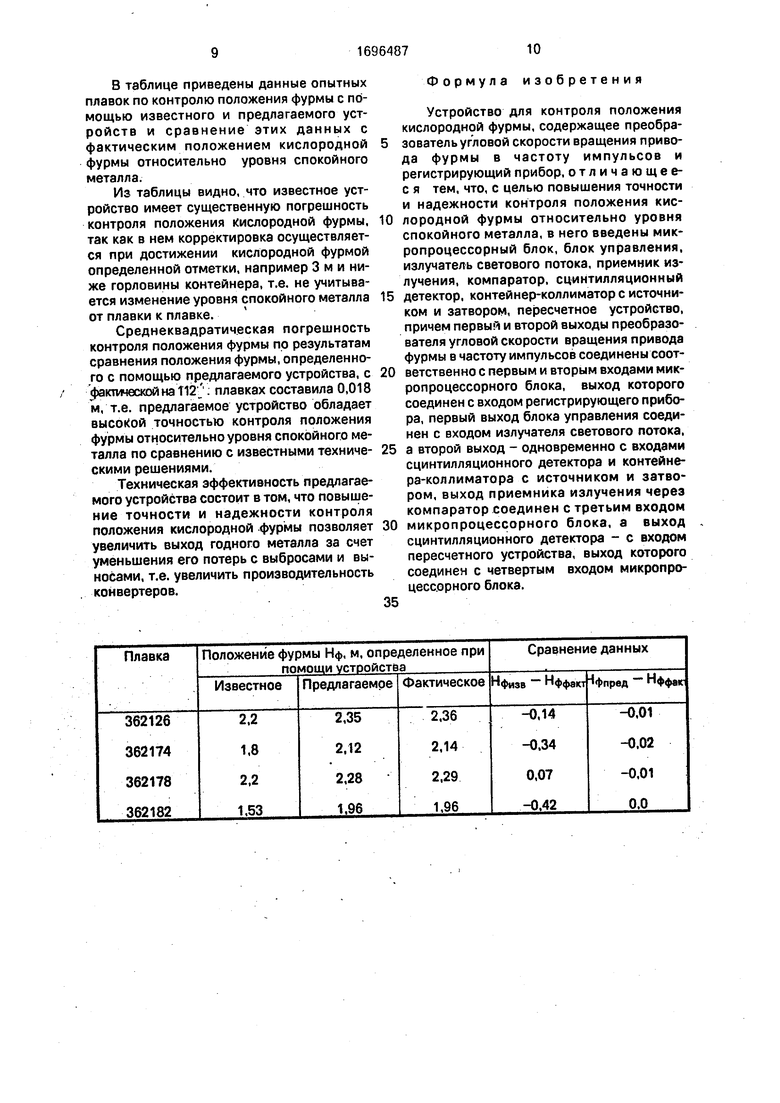
Микропроцессорный блок 2 (фиг.2) со- держит блок 15 гальванической развязки, блок 15 последовательного интерфейса, блок 17 обработки информации, блок 18 дешифрации, блок 19 клавиатуры, блок 20 индикации, блок 21 цифроаналогового преобразователя.
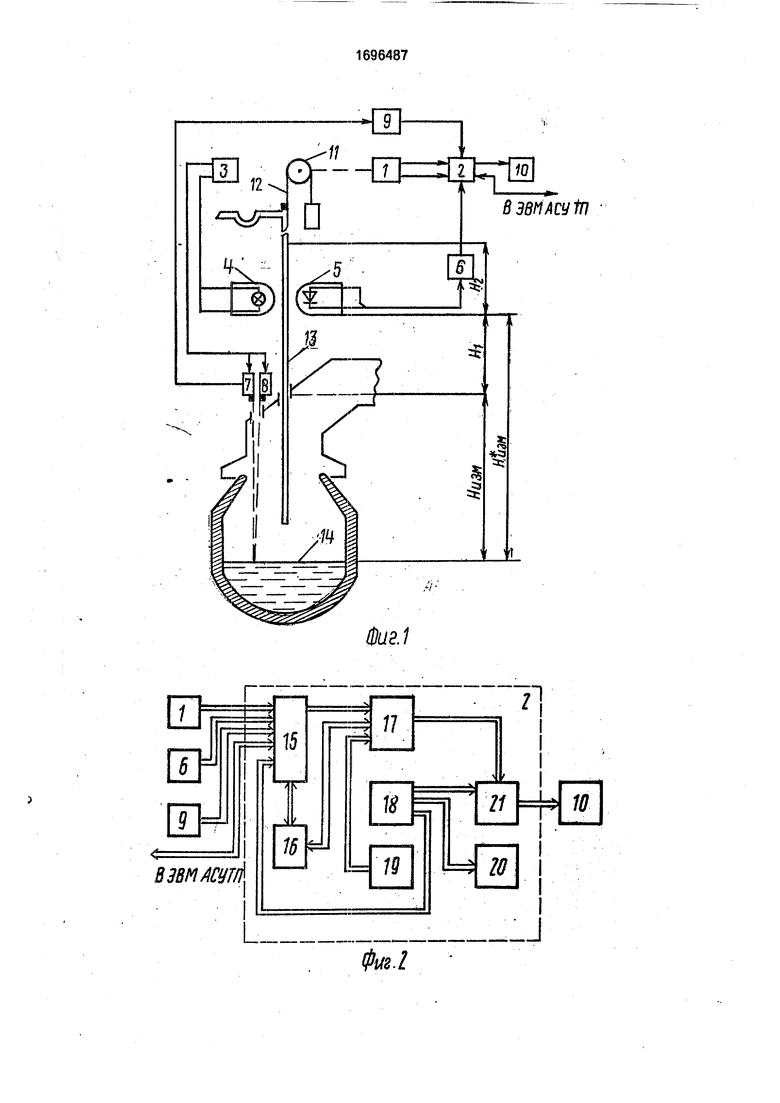
Блок 15 гальванической развязки включает в себя (фиг.З) блоки 22-25 согласования, представляющие собой группы оптопар, например, типа АОТ. Блок 16 по- следовательного интерфейса включает в себя транзисторный ключ, состоящий из транзистора 26 и резистора 27, и синхронно-асинхронный приемопередатчик 28, который может быть реализован на микросхеме типа КР 580ВВ51. Блок 17 обработки информации включает в себя шинный формирователь 29, который может быть реализован на микросхеме КР 580ВА86, центральный процессор 30, который может быть реализован на однокристальной мик- роЭВМтипа KM 1816BE35, регистр 31 адреса, который может быть реализован на микросхеме КР 589ИР12, шинный формирователь 32, который может быть реализован на микросхеме КР 580ВА86, постоянное запоминающее устройство 33, которое может быть реализовано на микросхеме КР 573РФ2.
Блок 18 дешифрации (фиг.4) включаете себя регистр 34, который может быть реализован на микросхеме КР 589ИР12, регистр 35, который может быть реализован на микросхемах К555ИР1, дешифратор 36, который может быть реализован на микро- схеме К155ИДЗ. Блок 20 индикации включает в себя дешифратор 37, который может быть реализован на микросхеме К555ИД18, блок 38 индикаторов, который может быть реализован на светодиодных индикаторах
типа КЛЦ, транзисторные ключи, которые могут быть реализованы на транзисторах 39-42 и резисторах 43-46.
Цифроаналоговый преобразователь 21 включает в себя однокристальный цифроа- налоговый преобразователь 47, который может быть реализован на микросхеме К 1801ПА1, устройство 48 выборки и хранения, которое может быть реализовано на микросхеме К1100СК2, усилитель тока, который может быть реализован на транзисторе 49 и резисторе 50.
Блок 3 управления может быть пред- старлен, например, в виде таймера, который по команде от ЭВМ АСУТП или по команде мастера-технолога выдает две чередующиеся между собой команды, сдвинутые по времени, например в пределах от 30 до 75 с, определяемых экспериментально. Излучатель 4 светового потока может быть представлен, например, в виде лампы накаливания. Приемник 5 излучения может быть представлен, например, в виде фотодиода. Излучатель 4 светового потока и приемник 5 излучения расположены один напротив другого на таком расстоянии, которое обеспечивает свободное прохождение кислородной фурмы между ними. Узлы приемной 5 излучения и излучателя 4 светового погоса устанавливаются в корпусе, содержащие специальные окна для попадания света от излучателя 4 на приемник 5, когда срез сопел кислородной фурмы находится выше приемника 5 излучения и излучателя 4 светового потока. Излучатель 4 светового потока и приемник 5 излучения устанавливают на расстоянии Hi (фиг.1), равном, например, 1,8 м от уровня расположения контейнера-коллиматора 8 с источником и затвором, а также сцинтил- ляционного детектора 7.
Компаратор 6 представляет собой операционный усилитель, первый вход которого подключен к выходу приемника 5 излучения, а второй вход операционного усилителя подключен к выходу источника опорного напряжения.
Сцинтилляционный детектор 7 может быть представлен, например, спектрометрическим блоком детектирования типа 6931-20, который помещается в водоохл аж- даемый кожух. В корпусе выполнено резьбовое отверстие для помещения штока-держателя источника и коллимационное отверстие. Источник гамма-излучения может быть представлен, например, в виде изотопа Cs .
Контейнер-коллиматор 8 с источником и затвором, а также сцинтилляционный детектор 7 может быть установлен на расстоянии (фиг.1), равном, например. 5,1 м от среза горловины конвертера/. Диаметр коллимационного отверстия выбирается в зависимости от мощности источника с таким условием, чтобы угол раскрытия луча обеспечивал получение точных и воспроизводимых результатов на всех значениях уровня спокойного металла от минимального до максимального значения. Пределы значений диаметра коллимационного отверстия при активности источника 5,4 К составляет 5-7 мм.
Пересчетное устройство 9 может быть представлено, например, в виде радиометра РГТ-20046 (производства ГДР) или ПС02- 4ЕМ (производства СССР).
Регистрирующий прибор 10 может быть представлен в виде самописца, например, типа КСП-4.
Аппаратная часть устройства работает следующим образом.
Две последовательности импульсов, сдвинутые относительно одна другой на 90°, с выхода преобразователя ; 1 поступают на вход блока 23 согласования (фиг.З), а с выхода блока 23 согласования поступают на тестированные входы центрального процессора 30. В блоке 17 обработки информации происходит преобразование последовательностей импульсов в цифровой код, с учетом направления вращения привода фурмы (по сдвигу фаз между импульсами) и с учетом коэффициента масштабирования а. Выходные потенциальные сигналы, поступающие с пересчетного устройства 9, нормализуются в блоке 24 согласования и с выходом блока 24 согласования поступают на двунаправленные выходные шины шинного формирователя 29; к этим шинам подключен входной канал информации цифроаналогового преобразователя 21. Входные шины шинного формирователя 29 подключены к двунаправленным шинам центрального процессора 30.
В зависимости от уровня логического сигнала, поступающего на управляющий вход шинного формирователя 29 с выхода 19 регистра 34, шинный формирователь 29 принимает информацию с блока 24 согласования и выдает ее на двунаправленные шины центрального процессора 30. или же шинный формирователь 29 передает информацию, поступающую с шин центрального процессора 30, во входной канал цифроаналогового преобразователя 21 (фиг.4), в котором цифровой код преобразуется однокристальным цифроаналоговым преобразователем 47 в аналоговый сигнал. Аналоговый сигнал записывается в устройство 48 выборки и хранения по сигналу, поступающему на его управляющий вход с выхода блока 17 регистра 34, выделяется на выходе устройства 48 выборки и хранения и усиливается усилителем тока на транзисторе 49, к которому подключается регистрирующий прибор 10.
Информация, поступившая на двунаправленные шины центрального процессора 30 с выходных шин шинного формирователя
0 29, преобразуется в блоке 17 обработки информации в соответствии с заданной программой. Результаты преобразования заносятся во внутреннее оперативное запоминающее устройство центрального про5 цессора 30.
Управление блоком 19 клавиатуры и блоком 20 индикации осуществляется с помощью блока 18 дешифрации, в котором цифровой код, поступающий с центрально0 го процессора 30, заносится в регистры 34 и 35. С выхода регистра 35 цифровой код поступает на входы дешифратора 36 и 47. Дешифратор 36 управляет блоком 19 клавиатуры, блоком 25 согласования (низкий уро5 вень напряжения, поступающего с выхода дешифратора 36, позволяет открыться опт- рону в блоке 25 согласования, вход которого соединен с выходом компаратора 6) и ключами на транзисторах 39-42, подключенны0 ми к катодам индикаторов блока индикаторов 38.
Связь микропроцессорного блока 2 с ЭВМ АСУТП осуществляется через последовательный интерфейс 16. Выходной сиг5 нал с приемопередатчика 28 через ключ на транзисторе 26 поступает на первый вход блока 22 согласования и с первого выхода блока 22 согласования поступает в ЭВМ АСУТП, сигнал от ЭВМ АСУТП поступает на
0 второй вход блока 22 согласования и с второго выхода блока 22 согласования поступает на приемный вход приемопередатчика 28.
Центральный процессор 30 работает
5 по программе, записанной в постоянном запоминающем устройстве 33. Фиксирование первых восьми разрядов адреса, выставляемых центральным , процессором 30 на шины постоянного запоминающего устройства
0 33, осуществляется в регистре 31, остальные (старшие) разряды адреса поступают через шинный формирователь 32.
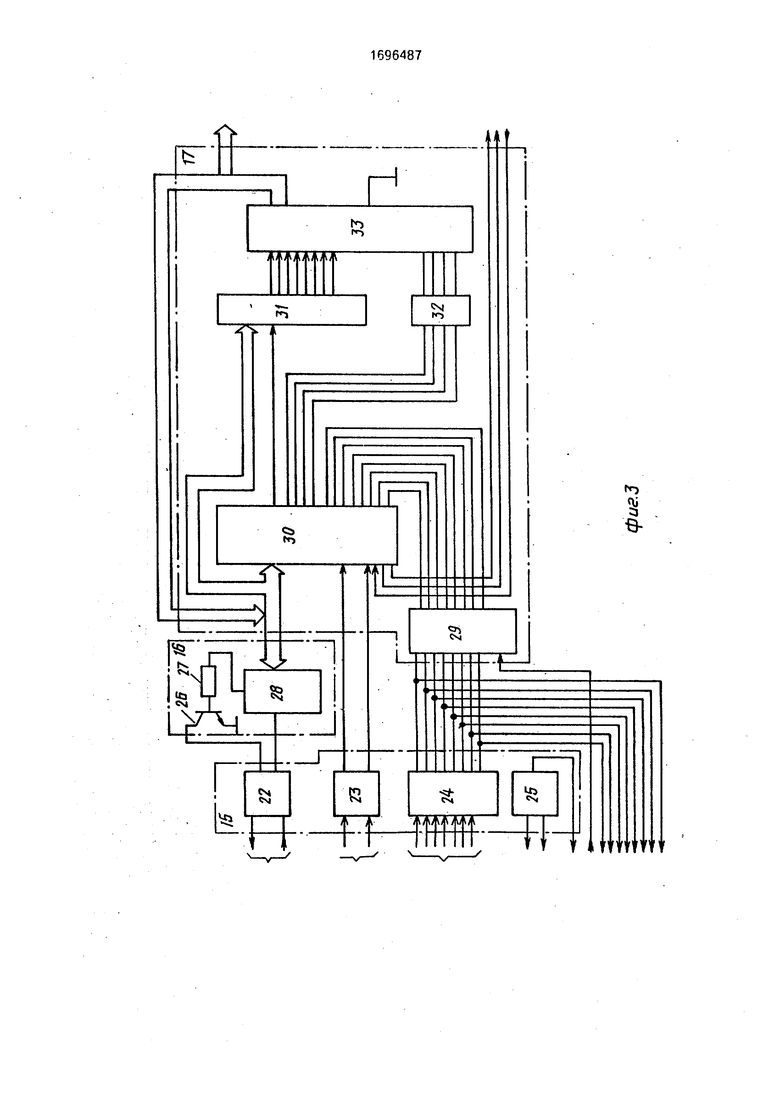
Устройство работает следующим образом (фиг.5).
5 При переводе конвертера в вертикальное положение после окончания технологического процесса заливки чугуна по команде от ЭВМ АСУТП или по команде от мастера-технолога блокЗ управления выдает две чередующиеся между собой команды,
сдвинутые по времени в пределах от 30 до 75 с, определяемых экспериментально. По первой команде открывается затвор контейнера-коллиматора 8 с источником и гамма-излучение проходит через коллиматор и достигает поверхности спокойного металла; отражаемый поток гамма-излучения, попадая в сцинтилляционный детектор 7, преобразуется в нем в серию электрических импульсов, которые поступают в пересчетное устройство 9. На выход пересчетного устройства 9 выдается цифровой код, пропорциональный интенсивности обратно рассеянного гамма-излучения, который поступает в микропроцессорный блок 2.
В микропроцессорном блоке 2 информация обрабатывается в соответствии со следующей зависимостью:
Низм -
NM
А + В
где Низм - измеряемая высота от уровня спокойного металла до среза контейнера- коллиматора 8 с источником и затвором, м;
N4 - количество импульсов, подсчитанных пересчетным устройством 9, и пропорциональное интенсивности обратно рассеянного гамма-излучения;
А,В - эмпирические коэффициенты, зависящие от типа используемого источника гамма-излучения.
Значение Низм запоминается в микропроцессорном блоке 2.
По второй команде блока 3 управления включается излучатель 4 светового потока, световой поток поступает на приемник излучения (кислородная фурма находится в верхнем положении - поднята на максимальную отметку) и по сигналу от приемника излучения на выходе компараторов 6 появляется сигнал, соответствующий 1.
В дальнейшем по команде от ЭВМ АСУТП или, по команде мастера-технолога производится опускание кислородной фурмы для того, чтобы начать процесс продувки. При опускании кислородной фурмы происходит поворот вала лебедки, сочлененного безлюф- товой муфтой с преобразователем 1 угловой скорости вращения привода фурмы в частоту импульсов (фиг. 1), на первом и втором выходе которого появляется последовательность импульсов, сдвинутых один другого на 90°. которые поступают на вход микропроцессорного блока 2. В микропроцессорном блоке 2 прои-зводится подсчет количества импульсов. Одновременно с началом отсчета в микропроцессорном блоке 2 осуществляется суммирование по зависимости
Н изм.;
Низм + Hi,
(2)
где Нхизм - расстояние от уровня спокойного металла до уровня излучателя светового
5 потока с приемником излучения, м;
Hi - расстояние от затвора контейнера- коллиматора с источником до уровня излучателя светового потока с приемником излучения, м.
10 Значение НхИзм запоминается в микропроцессорном блоке 2.
В момент прохождения среза сопел кислородной фурмы уровня излучателя 4 светового потока исчезает выходной сигнал с
15 приемника 5 излучения и с выхода компаратора 6 в микропроцессорный блок 2 поступает сигнал, соответствующий О. В микропроцессорном блоке 2 осуществляется определение значения коэффициента
20 масштабирования а по зависимости:
а
Н2
(3)
где Н2 - расстояние между отметкой верхнего (максимального) положения кислородной фурмы и уровнем излучателя 4 светового потока;
п - количество импульсов, подсчитан- ное устройством с момента начала опускания кислородной фурмы.
В дальнейшем определение положения кислородной фурмы относительно уровня спокойного металла осуществляется мик- ропроцессорным блоком 2 по зависимости; Нф(1).п(4)
где Нф(т) - положение кислородной фурмы относительно уровня спокойного металла,м;
п - количество импульсов, подсчитанное устройством с момента начала опускания кислородной фурмы;
а- коэффициент масштабирования.
На выходе микропроцессорного блока 2 получают аналоговый сигнал, пропорциональный положению кислородной фурмы относительно уровня спокойного металла, регистрируемый регистрирующим прибором 10.
Учет изменения уровня спокойного металла в конвертере из-за изменения геометрических параметров полости конвертера в связи с износом его футеровки, а также изза изменения объема шихтовых материалов (лома и чугуна) повышает точность и надежность контроля положения кислородной фурмы относительно уровня спокойного металла.
В таблице приведены данные опытных плавок по контролю положения фурмы с помощью известного и предлагаемого устройств и сравнение этих данных с фактическим положением кислородной фурмы относительно уровня спокойного металла.
Из таблицы видно, что известное устройство имеет существенную погрешность контроля положения кислородной фурмы, так как в нем корректировка осуществляется при достижении кислородной фурмой определенной отметки, например 3 м и ниже горловины контейнера, т.е. не учитывается изменение уровня спокойного металла от плавки к плавке.
Среднеквадратическая погрешность контроля положения фурмы по результатам сравнения положения фурмы, определенного с помощью предлагаемого устройства, с фактической на 112, . плавках составила 0,018 м, т.е. предлагаемое устройство обладает высокой точностью контроля положения фурмы относительно уровня спокойного металла по сравнению с известными техниче- скими решениями.
Техническая эффективность предлагаемого устройства состоит в том, что повышение точности и надежности контроля положения кислородной фурмы позволяет увеличить выход годного металла за счет уменьшения его потерь с выбросами и выносами, т.е. увеличить производительность конвертеров.
Формула изобретения
Устройство для контроля положения кислородной фурмы, содержащее преобразователь угловой скорости вращения привода фурмы в частоту импульсов и регистрирующий прибор, отличающее- с я тем, что, с целью повышения точности и надежности контроля положения кислородной фурмы относительно уровня спокойного металла, в него введены микропроцессорный блок, блок управления, излучатель светового потока, приемник излучения, компаратор, сцинтилляционный детектор, контейнер-коллиматор с источником и затвором, пересчетное устройство, причем первый и второй выходы преобразователя угловой скорости вращения привода фурмы в частоту импульсов соединены соответственно с первым и вторым входами микропроцессорного блока, выход которого соединен с входом регистрирующего прибора, первый выход блока управления соединен с входом излучателя светового потока, а второй выход - одновременно с входами сцинтилляционного детектора и контейнера-коллиматора с источником и затвором, выход приемника излучения через компаратор соединен с третьим входом микропроцессорного блока, а выход сцинтилляционного детектора - с входом пересчетного устройства, выход которого соединен с четвертым входом микропроцессорного блока.
вЗВМАСУК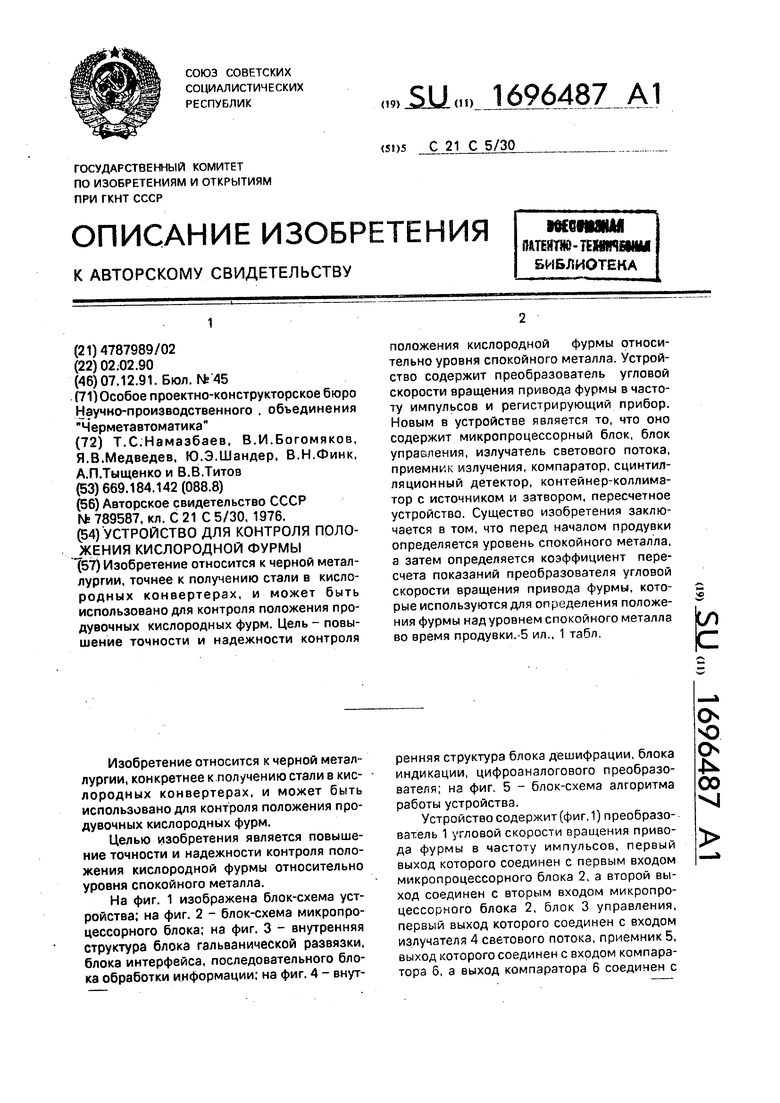



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля уровня шлака в конвертере | 1984 |
|
SU1219653A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НЕПРЕРЫВНОГО КОНТРОЛЯ СОСТОЯНИЯ ОБЪЕКТА, СОДЕРЖАЩЕГО ГЕРМЕТИЧНЫЕ КОНТЕЙНЕРЫ С ВЫСОКОТОКСИЧНЫМИ РАДИОАКТИВНЫМИ МАТЕРИАЛАМИ | 2021 |
|
RU2757867C1 |
| Устройство для контроля процесса шлакообразования в конверторе | 1988 |
|
SU1581749A1 |
| Устройство для контроля процесса шлакообразования в конвертере | 1990 |
|
SU1710580A1 |
| Ультразвуковой терапевтический аппарат | 1989 |
|
SU1717106A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1990 |
|
RU2025042C1 |
| Устройство для контроля уровня расплава в конверторе | 1984 |
|
SU1295753A1 |
| Устройство для контроля уровня шлака в конвертере | 1983 |
|
SU1089141A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БОЛЬШИХ ВЫСОТ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БОЛЬШИХ ВЫСОТ | 1993 |
|
RU2072530C1 |
| УЛЬТРАЗВУКОВОЙ ВОЛНОВОДНЫЙ СИГНАЛИЗАТОР УРОВНЯ ЖИДКОСТИ | 2015 |
|
RU2592045C1 |
Изобретение относится к черной металлургии, точнее к получению стали в кислородных конвертерах, и может быть использовано для контроля положения продувочных кислородных фурм. Цель - повышение точности и надежности контроля положения кислородной фурмы относительно уровня спокойного металла. Устройство содержит преобразователь угловой скорости вращения привода фурмы в частоту импульсов и регистрирующий прибор. Новым в устройстве является то, что оно содержит микропроцессорный блок, блок управления, излучатель светового потока, приемник излучения, компаратор, сцинтил- ляционный детектор, контейнер-коллиматор с источником и затвором, пересчетное устройство. Существо изобретения заключается в том, что перед началом продувки определяется уровень спокойного металла, а затем определяется коэффициент пересчета показаний преобразователя угловой скорости вращения привода фурмы, которые используются для определения положения фурмы над уровнем спокойного металла во время продувки.-5 ил., 1 табл. fe
A«7
r со ч«О Oi
u
Запуск таймера
6
ления
Ж
Формирование цикла считдания
UX3WCU 1/НфОРМГ
ииасаересчелр wtftynjxucffrfy
Ни Ниэм А+В
Включение излучателя светового патока
Формирование цикла записи и считывания слреоброзова- тёля ПДОЗ-З
JL
Непм Низн+Н1
| Устройство для контроля положения кислородной фурмы | 1978 |
|
SU789587A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
