1
.Изобретение относится к измерительной технике контроля процесса .плавки в черной металлургии, может быть использовано в системах управления и контроля положения кислородной фурмы и является усовершенствованием устройства по авт.св. № 1006498.
Целью изобретения является сокращение Времени продувки за счет получения достоверной информации о положении кислородной фурмы над по- верхностью жидкого металла на протяжении всего цикла плавки.На фиг.1 представлена функциональная схема устройства для определения высоты фурмы в конвертере; на фиг.2 - функциональная схема четвертого элемента синхронизации; на фиг.З - временные диаграммы, иллюстрирующие работу детектора прекращения и детектора фиксации ультра- ,звука; на фиг. 4 и 5 - электричес1245.598- 2
детектора 4 фиксации прекращения
35
40
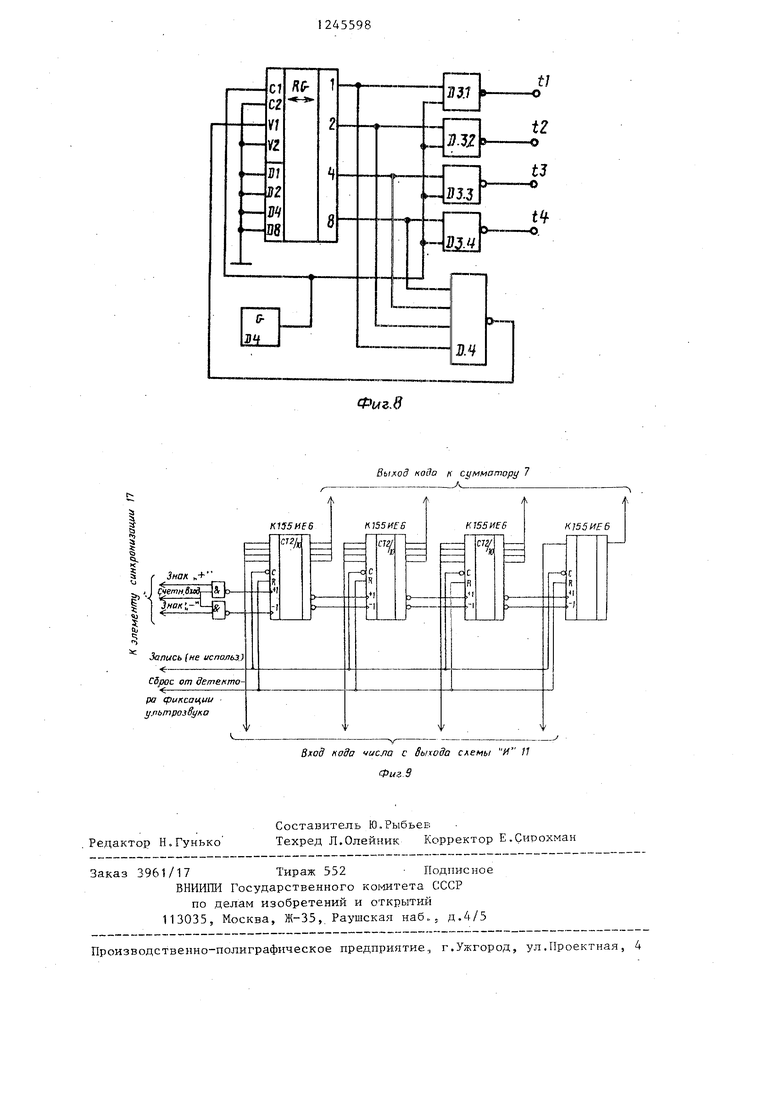
кие бхемы детектора фиксации ультра- звука и детектора фиксации прекращения ультразвука; на фиг.6 - электрическая схема блока формирования; на фиг.7 - то же, блока управления; на фиг.8 - то же, детектора касания щупа; на фиг.9 - то же, счетчика высоты фурмы.
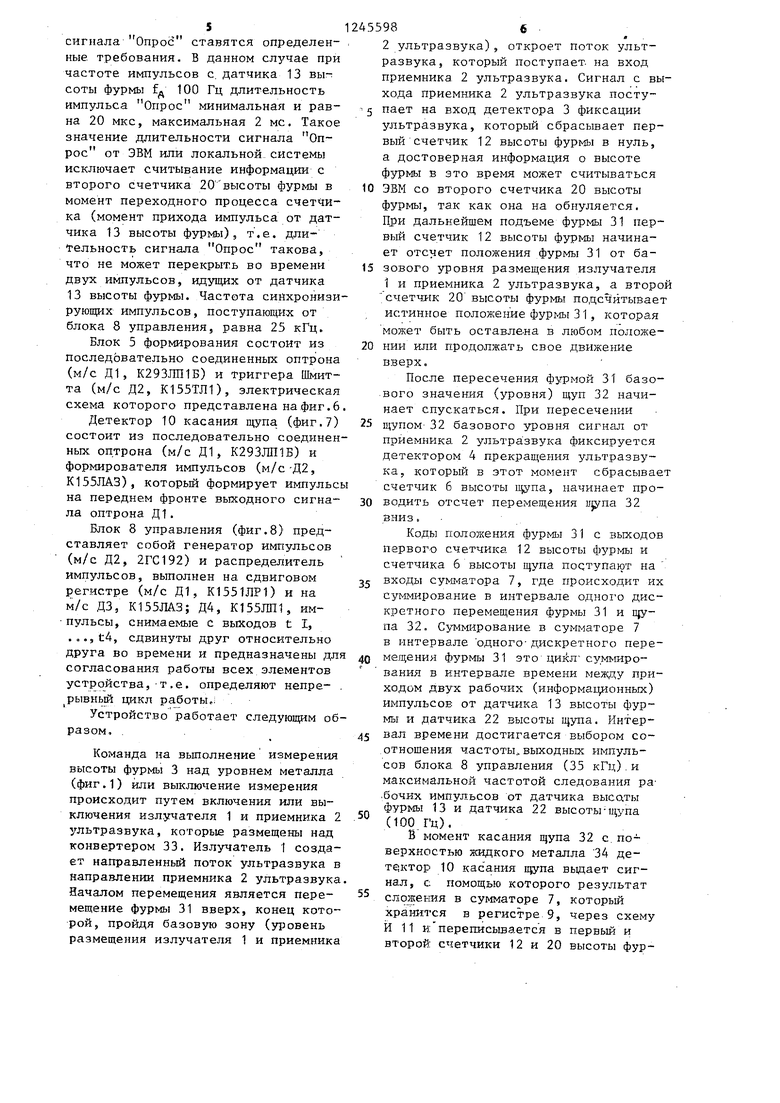
Устройство для определения высоты фурмы в конвертере содержит 1з- лучатель 1 и приемник 2 ультразвука, детектор 3 фиксации ультразвука де- тектор 4 фиксации прекращения ультразвука, блок 5 формирования, счетчик 6 высоты щупа, сумматор 7, блок 8 управления, регистр 9, детектор 10 касания щупа, схему И 11, первый счетчик 12 высоты фурмы, датчик 13 высоты фурмы, выход которого соединен с осью элекропривода 14, четыре элемента 15-18 синхронизации, вход етвертого элемента 18 синхронизации соединен с каналом 19 ЭВМ Опрос второй счетчик 20 высоты фурмы, .выход которого соединен с каналом 21 считывания информации, датчик 22 высоты щупа, вход которого .соед11нен с осью привоДа щупа 23, а его выход через блок 5 формирования - с первым выходом первого элемента 15 синхронизации, другой вход которого соединен с первым выходом блока 8 управления. Выход первого элемента 15 синхронизации соединен - со счетным; входом счетчика 6 высоты щупа, вход Сброс которого соединен с выходом
ультразвука, вход которого соедин с общей точкой, соединяющей выход приемника 2 ультразвука, вход дет
5 тора ,3 фиксации ультразвука. Выхо счетчика 6 высоты щупа соединен с первым входом сумматора 7, другой вход которого соединен с вторым в дом блока 8 управления, третий в
10 сумматора 7 соединен с выходом с чика 12 высоты фурмы, а выход сум тора 7 соединен с входом регистра выход которого соединен с первым в дом схемы И 11, другой вход котор
15 соединен с выходом второго элемен 16 синхронизации, первый вход кот рого соединен с третьим выходом б ка 8 управления, а второй вход вт го эл€:мента 16 синхронизации чере
20 детектор 10 касания щупа соединен приводом щупа 23. Выход схемы И соединен общей точкой с входом В числа второго счетчика 20 высоты фурмы и входом Ввод числа перво .25 счетчика 12 высоты фурмы, вход Сброс в нуль которого соединен .с выходом детектора 3 фиксации ул развука, а счетный вхоД первого ,счетчнка 12 высоты фурмы соединен
30
выходом третьего элемента 17 синх низации, первьй вход которого со нен общей точкой с четвертым вых блока 8 управления и первым вход четвертого элемента 18 синхрониза другой вход которого соединен общ точкой с выходом датчика 13 высот фурмы и вторым входом третьего эл мента 17 синхронизации, третий вх четвертого элемента 18 синхрониз соединен с каналом 19 ЭВМ Опрос а выход четвертого элемента 18 си хронизации соединен со счетным вх дом второго счетчика 20 высоты фу мь, выход которого соединен с кан лом 21 считывания информации.
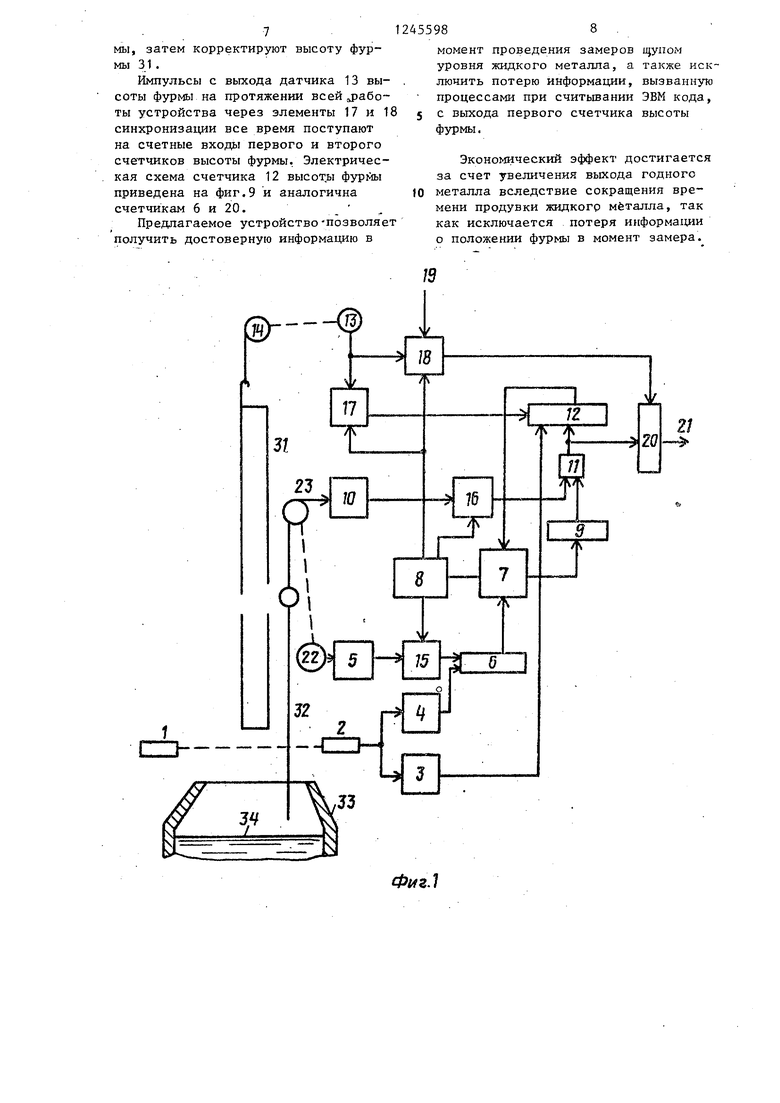
Второй счетчик 20 высоты, фурмы (фиг.1) по схемной реализадаи ана гичен первому счетчику 12 высоты фурмы и предназначен для хранения точной информацией о высоте фурггы протяжении всей плавки. Четвертый элем ёнт 18 синхронизации (фиг. 2) тоит из трех триггеров 24-26, дву схем И 27 и 28., схемы ИЛИ 29 и сх мы 30 задержки. Схемы и д 55 ствия элементов 15-17 синхронизац аналогичны элементу 18 синхрониза только не используется в них кана 19 Опрос.
50
35
40
ультразвука, вход которого соединен с общей точкой, соединяющей выход приемника 2 ультразвука, вход детек5 тора ,3 фиксации ультразвука. Выход счетчика 6 высоты щупа соединен с первым входом сумматора 7, другой вход которого соединен с вторым выходом блока 8 управления, третий вход
0 сумматора 7 соединен с выходом счетчика 12 высоты фурмы, а выход сумма- тора 7 соединен с входом регистра 9, выход которого соединен с первым входом схемы И 11, другой вход которой
15 соединен с выходом второго элемента 16 синхронизации, первый вход которого соединен с третьим выходом блока 8 управления, а второй вход второго эл€:мента 16 синхронизации через
20 детектор 10 касания щупа соединен с приводом щупа 23. Выход схемы И 11 соединен общей точкой с входом Ввод числа второго счетчика 20 высоты фурмы и входом Ввод числа первого 25 счетчика 12 высоты фурмы, вход Сброс в нуль которого соединен, .с выходом детектора 3 фиксации ультразвука, а счетный вхоД первого ,счетчнка 12 высоты фурмы соединен с
30
выходом третьего элемента 17 синхронизации, первьй вход которого соединен общей точкой с четвертым выходом блока 8 управления и первым входом четвертого элемента 18 синхронизации, другой вход которого соединен общей точкой с выходом датчика 13 высоты фурмы и вторым входом третьего элемента 17 синхронизации, третий вход четвертого элемента 18 синхронизации соединен с каналом 19 ЭВМ Опрос, а выход четвертого элемента 18 синхронизации соединен со счетным вхо- дом второго счетчика 20 высоты фур- мь, выход которого соединен с каналом 21 считывания информации.
Второй счетчик 20 высоты, фурмы (фиг.1) по схемной реализадаи аналогичен первому счетчику 12 высоты фурмы и предназначен для хранения точной информацией о высоте фурггы на протяжении всей плавки. Четвертый элем ёнт 18 синхронизации (фиг. 2) состоит из трех триггеров 24-26, двух схем И 27 и 28., схемы ИЛИ 29 и схемы 30 задержки. Схемы и дай- . 55 ствия элементов 15-17 синхронизации аналогичны элементу 18 синхронизации, только не используется в них канал 19 Опрос.
50
в излучателе 1 и приемнике 2 ультразвука чувствительным элементом ультразвуковых колебаний является магнитострикционный элемент, рабочая частота которого равна 16-18 кГц. Диаметр излучателя t и приемника 2 составляет 25 мм, максимальное расстояние между ними может быть до 7 м. Специальные насадки позволяют уменьшить диаметр ультразвукового луча до 6 мм, что делает эффективным применение ультразвука для контроля перемещений фурмы 31 и щупа 32, используя теневой эффект. Магнитострикционный приемник представляет собой колебательную систему, аналогичную излучателю 1. Поступающие на мембрану приемника ультразвуковые колебания вызывают в нем переменные механические напряжения благодаря чему в катушке возбуждается переменная ЭДС, которая усиливается. Далее этот сигнал поступает на входы детектора 3 фиксации ультразвука и детектора 4 Фиксации прекращения ультразвука, В детекторе 3 фиксации ультразвука сигнал (фиг.Зй) детектируется, фильтруется, т.е. происходит вьще- ение огибающей (фиг. ) , на переднем фронте которой формируется импульс Сброс (фиг.ЗЕ.), предназнаенный для сбрасывания счетчика 12
Высоты фурмы в ноль.
Диаграммы на фиг.З также иллюстрируют работу детектора 4 фиксации прекращения ультразвука. Кривые фиг.За и б аналогичны кривым детектора 3 фиксации ультразвука за исключением того, что импульс Сброс (фиг.Зг) формируется на заднем фронте огибающей, котррый предназначен ля сброса счетчика 6 высоты щупа в ноль-.
Таким образом, с выхода детектоов 3 и 4 ультразвукового излучения снимаются импульсы (фиг.ЗЬ и 2.) , коорые необходимы для сбрасывания четчиков б и 12 в ноль.
Электрическая схема детектора 3 фиксации ультразвука (фиг.4) состои из операционного усилителя Д1 (К19Т401Б), конденсатора С1, предназначенного для фильтрации высокочастотных составляющих выходного сигнала приемника 2 ультразвука, диода УД1, осуществляющего вьщеление положительной огибающей (фиг.3б,о), триггера Шмитта Д2 (м/с К155ТЛ1),
. 10
15
20
245598. 4
формирующего прямоугольные импульсы, и формирователя импульсов по переднему фронту (м/с-ДЗ, К155ЛАЗ, конд. С2).
Электрическая схема детектора фиксации прекращения ультразвука 4 (фиг.5) включает элементы Д1, С1, УД1, Д2 выполняют функции, аналогичные детектору 4 фиксации ультразвука, -за исключением элементов ДЗ (м/с К 155ЛАЗ),которые формируют им- пульсы по заднему фронту огибающей (фиг.З-,).
Четвертый, элемент 18 синхронизации работает следующим образом (фиг.2). Импульс с выхода датчика 13 высоты фурмы, пройдя ШШ 29, устанавливает первьш триггер 24 в единичное состояние, единичный выход которого через первую схему И 27 пропускает синхроимпульс от блока 8 управления, который переводит, второй триггер 25 также в единичное состояние, единичный выход которого через вторую схему И 28 пропускает импульс синхронизации на выход четвертого элемента 18 синхронизации, который через 30 задержки и устанавливает в нулевое (исходное) состояние триггеры 24 и 25. Далее цикл повторяется,
Триггер 26 предназначен для запоминания направления вращения датчика 13 высоты фурмы и передачи этой информации на вход Знак (фиг.9) счетчика 20 высоты фурмы.
При считывании информации ЭВМ или .локальной системой управления на первую схему И 27 четвертого элемента 18 синхронизации (фиг.2) поступает сигнал Опрос, который запрещает дальнейшее прохождение синхроимпульсов от блока 8 управления через . схему И 27 при единичном состоянии триггера 24, который запоминает им- пульс от датчика 13 высоты фурмы, исключая .тем самым потерю информации при считывании. После окончания сигнала Опрос открывается первая схема И 27 и синхроимпульс от блока 8 управления проходит далее аналогично описанному.
25
30
35
40
50
Для нормальной работы четвертого элемента 18 синхронизации в режиме 55 считывания информации с выхода второго счетчика 20 высоты фурмы, к частоте импульсов, идущих с датчика 13 высоты фурмы, и длительности
сигнала Опрос ставятся определен- ные требования. В данном слз чае при частоте импульсов с. датчика 13 высоты фурмы f 100 Гц длительность импульса Опрос минимальная и равна 20 МКС, максимальная 2 мс. Такое значение длительности сигнала Опрос от ЭВМ или локальной системы исключает считывание информации с второго счетчика 20 высоты фурмы в момент переходного процесса счетчи- ка (момент прихода импульса от датчика 13 высоты фурмы), т.е. длительность сигнала Опрос такова, что не может перекрыть во времени двух импульсов, идущих от датчика 13 высоты фурмы. Частота синхронизирующих импульсов, поступающих от блока 8 управления, равна 25 кГц.
Блок 5 формирования состоит из последовательно соединенных оптрона (м/с Д1, К293ЛП1Б) и триггера Шмит- та (м/с Д2, К155ТЛ1), электрическая схема которого представлена на фиг.6.
Детектор 10 касания щупа (фиг.7) состоит из последовательно соединенных оптрона (м/с Д1, К293ЛП1Б) и формирователя импульсов (м/С Д2, К155ЛАЗ), который формирует импульсы на переднем фронте выходного сигнала оптрона Д1.
Блок 8 управления (фиг.8) представляет собой генератор импульсов (м/с Д2, 2ГС192) и распредехштель импульсов, выполнен на сдвиговом регистре (м/с Д1, К1551ЛР1) и на м/с ДЗ, К155ЛАЗ; Д4, К155ЛП1, им- пульсы, снимаемые с выходов t I, .o.,t4, сдвинуты друг относительно друга во времени и предназначены для согласования работы всех элементов устройства,-т,е. определяют непре- . рывньй цикл работы.:
Устройство работает следующим образом.
Команда на выполнение измерения высоты фурмы 3 над уровнем металла (фиг.1) или выключение измерения происходит путем включения или выключения излучателя 1 и приемника 2 ультразвука, которые размещены над конвертером 33. Излучатель 1 создает направленньй поток ультразвука в направлении приемника 2 ультразвука Началом перемещения является перемещение фурмы 31 вверх, конец которой, пройдя базовую зону (у1:овень размещения излучателя 1 и приемника
2 ультразвука), откроет поток ультразвука, который поступает, на вход приемника 2 ультразвука. Сигнал с выхода приемника 2 ультразвука посту- 5 пает на вход детектора 3 фиксации ультразвука, который сбрасывает первый счетчик 12 высоты фурмы в нуль, а достоверная информация о высоте фурмы в это время может считываться 0 ЭВМ со второго счетчика 20 высоты фурмы, так как она на обнуляется. Цри дальнейшем подъеме фурмы 31 первый счетчик 12 высоты фурмы начинает отсчет положения фурмы 31 от ба- 5 зового уровня размещения излучателя 1 и приемника 2 ультразвука, а второй счетчик 20 высоты фурмы подсч йтывает истиньгое положение фурмы 3 1, которая может быть оставлена в любом положе- 0 НИИ или продолжать свое движение вверх.
После пересечения фурмой 31 базового значе1шя (уровня) щуп 32 начинает спускаться. При пересечении 5 щупоМ 32 базового уровня сигнал от приемника 2 ультра звука фиксируется детектором 4 прекращения ультразвука, который в этот момент сбрасывает счетчик 6 высоты iijyna, начинает про- 0 водить отсчет перемещения 32 вниз.
Коды положения фурмы 31 с выходов первого счетчика 12 высоты фурмы и счетчика б высоты щупа поступают на 5 входы сумматора 7, где происходит их суммирование в интервале одно1 о дискретного перемещения фурмы 31 и щупа 32. С -ммирование в сумматоре 7 в интервале одного- дискретного пере- 0 мещения фурмы 31 это цикл суммирования в интервале времени между приходом Двух рабочих (информационных) импульсов от датчика 13 высоты фурмы и датчика 22 высоты щупа. Интер- 5 вал времени достигается выбором со- отнощения: частоты, выходных импульсов блока 8 управления (35 кГц).и максимальной частотой следования ра- бочих импульсов от датчика высаты фурмы 13 и датчика 22 высоты-щупа (100 Гц).
В момент касания щупа 32 с. поверхностью жидкого металла 34 детектор 10 касания щупа вьодает сигнал, с помощью которого результат сложения в сумматоре 7, который
хранится в регистре,9, через схему И 11 к переписьшается в первый и второй счетчики 12 и 20 высоты фурмы, затем корректируют высоту фурмы 31 .
Импульсы с выхода датчика 13 высоты фурмы на протяжении всей работы устройства через элементы 17 и 18 синхрониза1щи все время поступают на счетные входы первого и второго счетчиков высоты фурмы. Электрическая схема счетчика 12 высоты фурмы приведена на фиг.9 и аналогична счетчикам 6 и 20.
Предлагаемое устройство-позволяет получить достоверную информацию в
момент проведения замеров уровня жидкого металла, а лючить потерю информации, процессами при считывании с выхода первого счетчика фурмы,
Экономический эффект достигается за счет увеличения выхода годного металла вследствие сокращения времени продувки жидкого металла, так как исключается потеря информахши о положении фурмы в момент замера.
Фиг.1
29
г
г
т
Синхр.
импульсы . о
Закрытие приёг нила излучения п/зм SSutKCHuu тупа 8низ
О/ппр /тив приё лникаj
изучения при движении/
(pypMti бберг./
7
,j
/илл/ ллл t
.,а
Оеадающая ,
/
1Ы1
Ht nujitc с5рос с(рормироВант и на уыноВе детектора 3
Лей
(li imnbc Сдроо, ccf opMUpoSaHHf u на Kixode детектора Ч
:t-..
26
вымд к SCtf знака
Z5
28
Выход к 5Ci на счетный 5 в}(од
opMUpoSaHHf u а Ч
:t-..
0-1.
Фиг.6
ТГ
JL
6
Т-Г
8
Л
.7
Вход кода числа с выхода слемь/ 1 П Фиг.9
Редактор Н.Гунько
Составитель Ю.Рыбьев
Техред Л.Олейник Корректор Е.Сирохман
Заказ 3961/17Тираж 552 Подписное
ВНИИШ- Государственного ког штета СССР
по делам изобретений и открытий 113035, Москва, Ж-35,. Раушская наб,.. д.4/5
Производственно-полиграфическое предприятие,, г.Ужгород, ул.Проектная, 4
Фиг.&
Вынод кода к а мматору 7

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения высоты фурмы в конвертере | 1980 |
|
SU1006498A1 |
| Устройство для контроля процесса шлакообразования в конвертере | 1990 |
|
SU1710580A1 |
| Устройство для контроля кислородно-конвертерного процесса | 1985 |
|
SU1364640A1 |
| Устройство для контроля процесса шлакообразования в конверторе | 1988 |
|
SU1581749A1 |
| Устройство стабилизации амплитуды видеосигнала | 1989 |
|
SU1748283A1 |
| Устройство цифрового контроля положения кислородной фурмы | 1984 |
|
SU1178771A1 |
| Устройство для сопряжения цифровой вычислительной машины с общей магистралью | 1980 |
|
SU907536A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТЕЛЕВИЗИОННЫМ ПРИЕМНИКОМ | 1987 |
|
RU2066931C1 |
| Устройство для сортировки деталей на конвейере по типоразмеру | 1985 |
|
SU1319932A1 |
| Устройство для контроля перемещения подвижных объектов | 1989 |
|
SU1652965A1 |

| Устройство для определения высоты фурмы в конвертере | 1980 |
|
SU1006498A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
