Од СГ5
Изобретение относится к плавучим самоподъемным установкам и может быть использовано на лесосплавных предприятиях лесной промышленности и в других отраслях народного хозяйства при проведении гидротехнических изыскательских и различных специализированных работ на неглубоководных речных, озерных и прибрежных морских акваториях, а также на водохранилиах.
Известна плавучая самоподъемная установка, содержащая платформу, коонны с приводом подъема и опускания, выполненного в виде гидроцилиндра 1.
Известна также плавучая самоподъемная установка, содержащая платорму с направляющими, в которых смонтированы колонны с башмаками, и приводы подъема и опускания платформы и колонн, связанные между собой 2.
Недостатком данной установки является то, что приводы подъема и опускания платформы и .колонн, выполненные в виде гидроиилиндров, имеют конечные длины, а значит при необходимости больших перемещений исполнительных органов (больше длины цииндров) должны работать ступенчато с применением дополнительных механизмов, что усложняет конструкцию приводов.
Кроме того, гидравлический привод данной установки, вследствие равенства диаметров цилиндров гидроподъемника и гидродомкратов, а также гидравлического соединения полостей цилиндров общим трубопроводом, не позволяет осуществлять полезного перераспределения нагрузок, так как давление в системе поддерживается постоянным. Поэтому усилия подъема груза и усилия, передаваемые на грунт от гидродомкратов, всегда равны, и в случае проседания грунта под одной из опор соответствующий гидродомкрат переместится до такЪго положения, пока реакция со стороны грунта не уравняется под всеми опорами.
Целью изобретения является упрощение конструкции приводов и снижения их энергоемкости.
Эта цель достигается тем, что каждый из приводов подъема и опускания платформы и колонны выполнен в виде двух приводных барабанов с
намотанными на них гибкими элементами, причем свободный конец одного из гибких элементов закреплен на башмаке колонны, а свободный конец другого гибкого элемента - на платфорг ме и огибает направляющие ролики, установленные в верхней части колонны, при этом первый барабан имеет скорость вращения в два раза меньшую
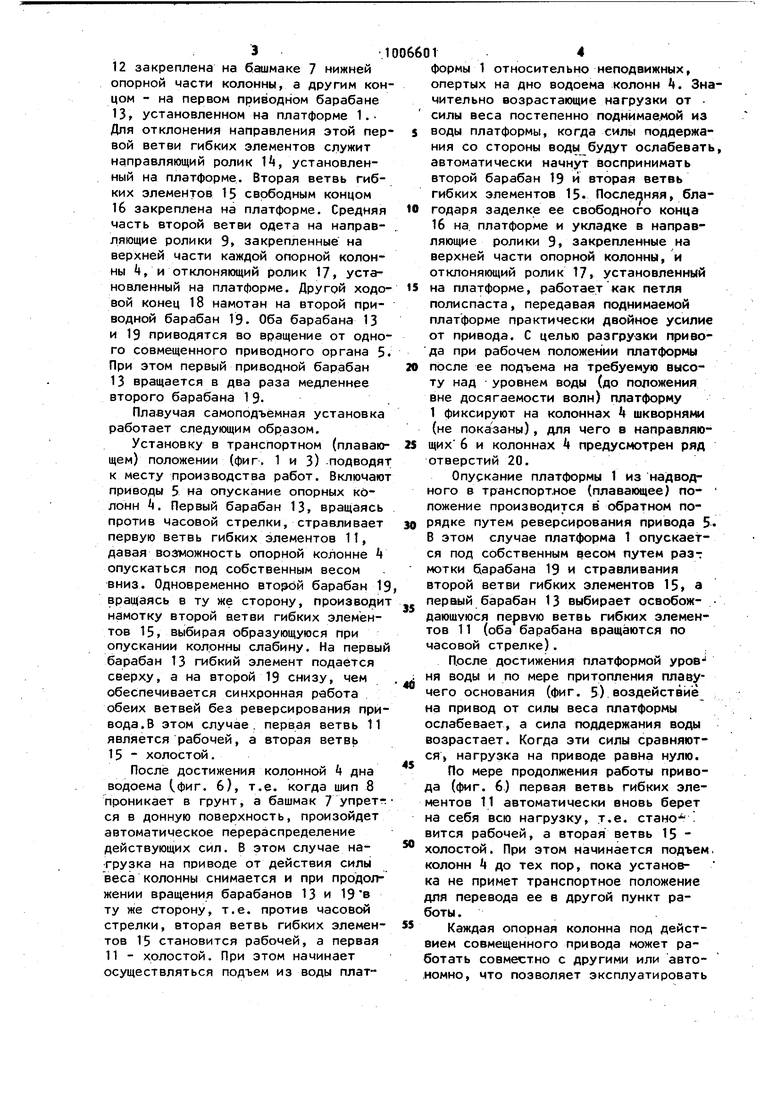
o скорости вращения второго барабана. . На фиг., 1 представлена плавучая самоподъемная установка в ее транспортном (плавающем) положении, вид сбоку; на фиг. 2 - то же, в рабочем
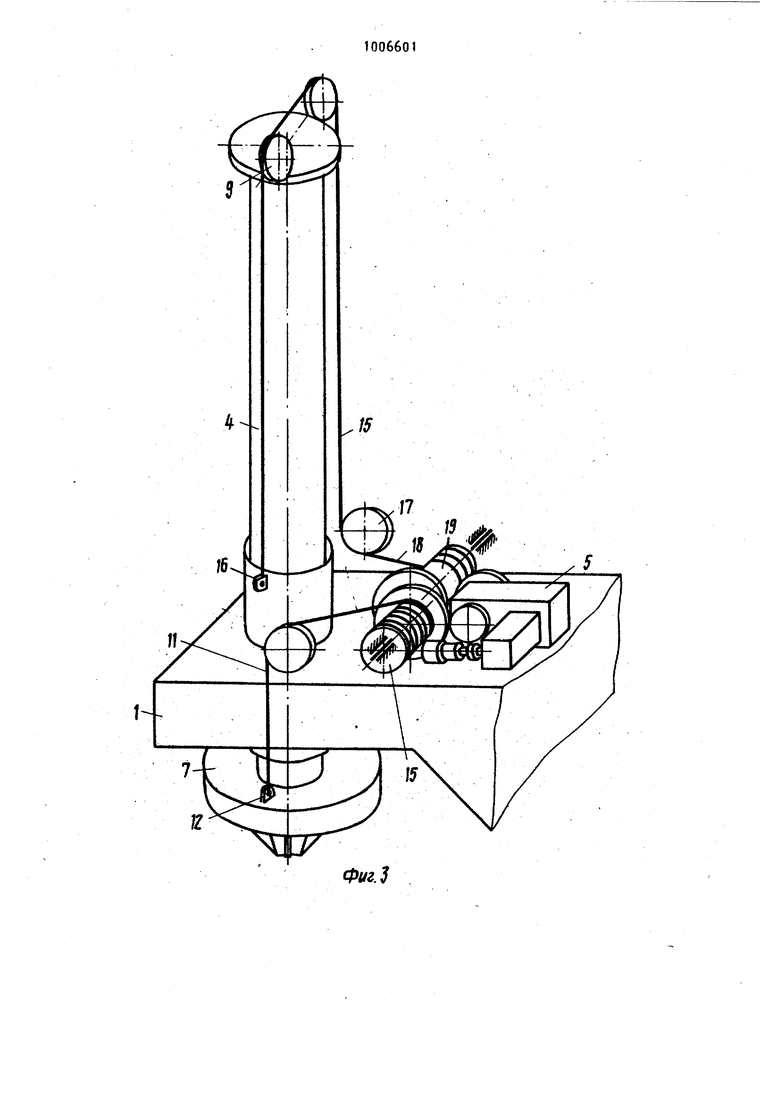
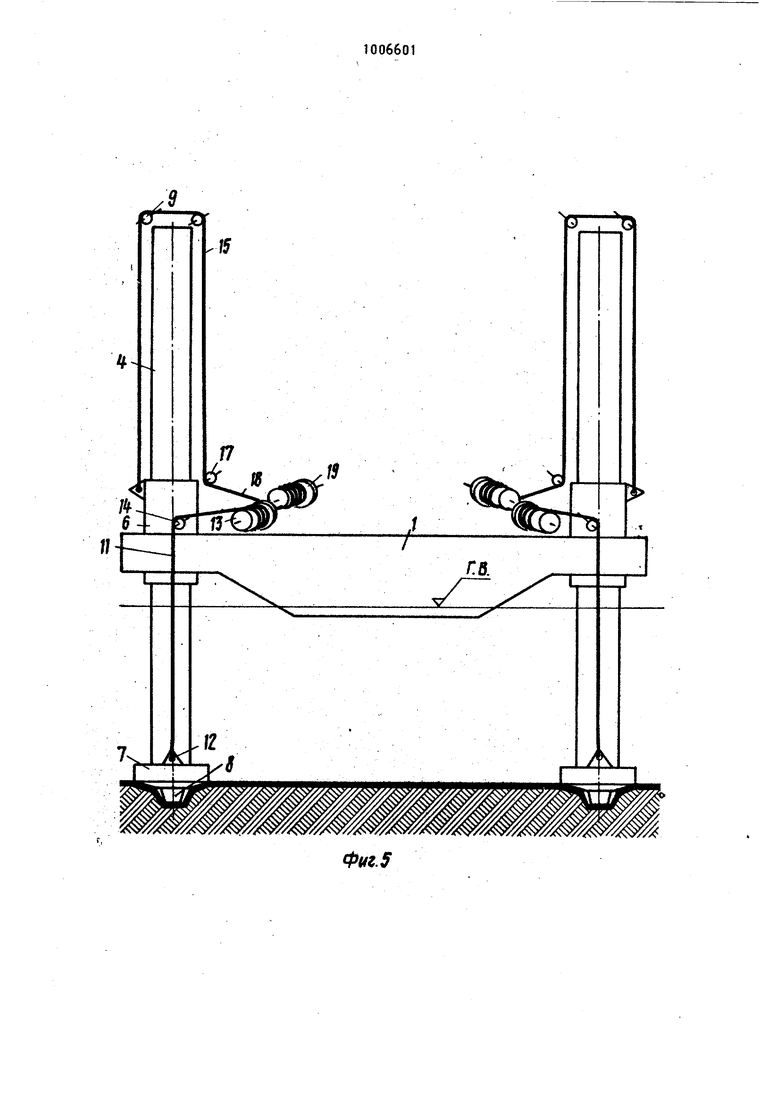
5 (надводном) положении; на фиг. 3 схема совмещенного привода подъема или опускания опорной колонны и плавучей платформы; на фиг. - схема привода при рабочем (надводном) положении установки; на фиг. 5 - то же,
при опускании платформы на воду; на
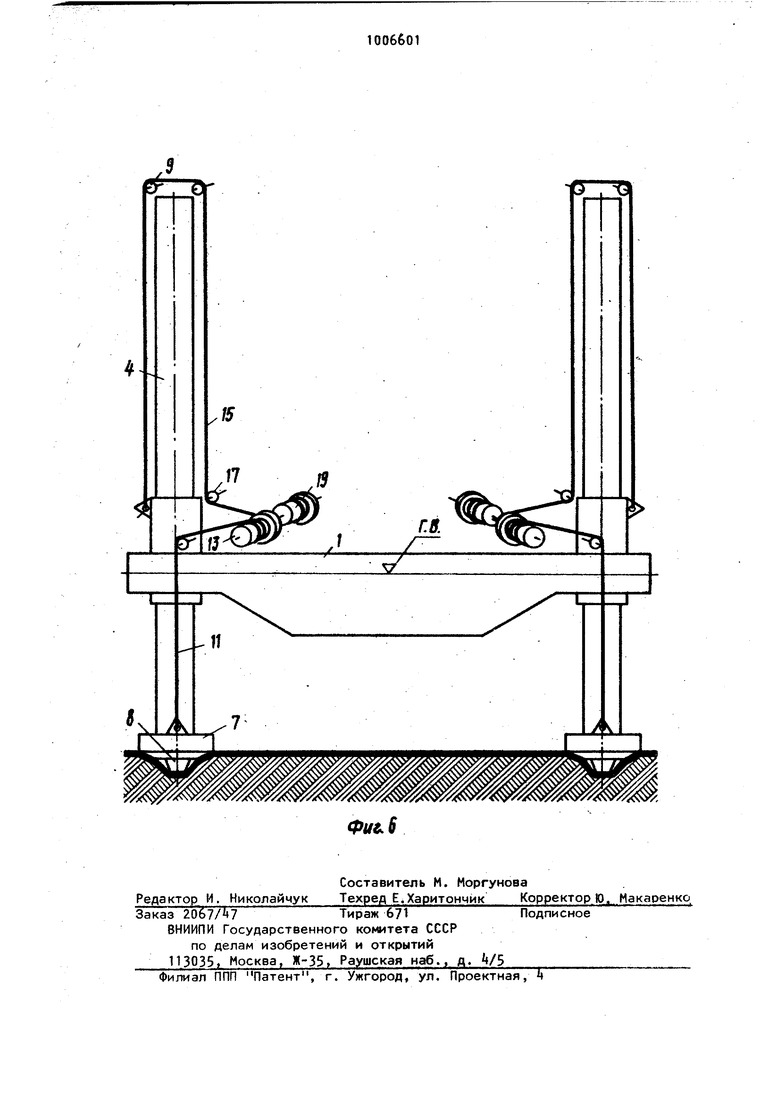
фиг. 6 - то же, при подъеме опорных
колонн в транспортное положение.
Плавучая самоподъемная установка
5 состоит из платформы 1 с установленным на ней оборудованием 2, включающим энергетический и жилищно-бытовой блоки 3, опорных колонн k и совмещенных приводов 5 подъема или
0 опускания опорных колонн и платформы.
Платформа 1 выполнена в виде плавучего основания катамаранного типа. В корпусе платформы предусмотрены направляющие 6, в которых перемещаются опорные колонны . На платформе может быть установлено любое оборудование 2, в зависимости от значения установки (изыскательские и гидрометеорологические приборы, буровое, водолазное, специализированное, технологическое и прочее оборудование) , а также энергетический и жилищно-бытовой блоки 3 для обслуживающего персонала.
Опорные колонны k в нижней части имеют уширенные башмаки 7 с шипами 8. В верхней части каждой опорной колонны закреплены обоймы направляю щих роликов 9 привода 5. Бйшмаки 7 в транспортном положении расположены в шинах 10 платформы 1, что снижает габаритную осадку установки и обеспечивает повышенную проходимость ее в условиях мелководных акваторий. Приводы 5 (фиг. 3) выполнены автономными для каждой колонны и состоят из двух ветвей гибких элементов, одна из которых 11 свободным концом
12закреплена на башмаке 7 нижней опорной части колонны, а другим концом - на первом приводном барабане 13, установленном на платформе 1.Для отклонения направления этой первой ветви гибких элементов служит направляющий ролик 1А, установленный на платформе. Вторая ветвь гибких элементов 15 свободным концом 16 закреплена на платформе. Средняя часть второй ветви одета на направляющие ролики 9, закрепленные на верхней части каждой опорной колонны 4, и отклоняющий ролик 17, установленный на платформе. Другой ходовой конец 18 намотан на второй приводной барабан 19. Оба барабана 13 и 19 приводятся во вращение от одного совмещенного приводного органа 5. При этом первый приводной барабан
13вращается в два раза медленнее второго барабана 19Плавучая самоподъёмная установка работает следующим образом.
Установку в транспортном (плавающем) положении (фиг, 1 и 3) подводят к месту производства работ. Включают приводы 5 на опускание опорных колонн . Первый барабан 13, вращаясь против часовой стрелки, стравливает первую ветвь гибких элементов 11, давая возможность опорной колонне А опускаться под собственным весом вниз. Одновременно второй барабан 19 вращаясь в ту же сторону, производит намотку второй ветви гибких элементов 15, выбирая образующуюся при опускании колонны слабину. На первый барабан 13 гибкий элемент подаётся сверху, а на второй 19 снизу, чем обеспечивается синхронная работа обеих ветвей без реверсирования привода. В этом случае, первая ветвь 11 является рабочей, а вторая ветвь 15 холостой.
После достижения колонной Ц дна водоема (.фиг. 6), т.е. когда шип 8 проникает в грунт, а башмак 7 упрется в донную поверхность, произойдет автоматическое перераспределение действующих сил. В этом случае нагрузка на приводе от действия силы веса колонны снимается и при продолжении вращения барабанов 13 и 19в ту же сторону, т.е. против часовой стрелки, вторая ветвь гибких элементов 15 становится рабочей, а первая 11 - холостой. При этом начинает осуществляться подъем из воды платформы 1 относительно неподвижных, опертых на дно водоема колонн А. Значительно возрастакмцие нагрузки от силы веса постепенно поднимае.мой из воды платформы, когда силы поддержания со стороны воды будут ослабевать автоматически начнут воспринимать второй барабан 19 и вторая ветвь гибких элементов 15. Последняя, благодаря заделке ее свободного конца 16 на. платформе и укладке в направляющие ролики 9, закрепленные на верхней части опорной колонны, и отклоняющий ролик 17, установленный на платформе, работает как петля полиспаста, передавая поднимаемой платформе практически двойное усилие от привода. С целью разгрузки привода при рабочем положении платформы после ее подъема на требуемую высоту над уровнем воды (до положения вне досягаемости волн) платформу 1 фиксируют на колоннах шкворнями (не пока-заны), для чего в направляющих 6 и колоннах 4 предусмотрен ряд отверстий 20.
Опускание платформы 1 из надводного в транспортное (плавающее) попоженив производится в обратном порядке путем реверсирования привода 5 В этом случае платформа 1 опускается под собственным весом путем paat мотки барабана 19 и стравливания второй ветви гибких элементов 15 а первый барабан 13 выбирает освобождающуюся первую ветвь гибких элементов 11 (оба барабана вращаются по часовой стрелке).
П.осле достижения платформой уровня воды и по мере притопления плавучего основания (фиг. 5) воздействй(В на привод от силы веса платформы ослабевает, а сила поддержания воды возрастает. Когда эти силы сравняются нагрузка на приводе равна нулю.
По мере продолжения работы привода (фиг. 6) первая ветвь гибких элементов 11 автоматически вновь берет на себя всю нагрузку, т.е. становится рабочей, а вторая ветвь 15 холостой. При этом начинается подъем колонн Ц до тех пор, пока установка не примет транспортное положение для перевода ее в другой пункт работы.
Каждая опорная колонна под действием совмещенного привода может работать совместно с другими или автономно, что позволяет эксплуатировать
установку при значительных неровностях дна водоема. Причем независимо от привода, например, бесконтрольно всплывать, благодаря постоянной кинематической связи с последним, колонны не могут.
Наличие совместно работающих двух, ветвей гибких элементов и барабанов привода для подъема или опускания опорных колонн и платформы позволяет в отличие от известных установок автоматически перераспределять нагрузки и рационально использовать силы веса и плавучести колонн и платформы без переключения привода, исключает неуправляемый экипажем процесс подъема колонн со дна водоема под действием сил плавучести, чем значительно повышает надежность и безопасность работы плавучей самоподъемной установки.
По предварительным расчетам потребность только лесной промышленности в данных установках составляет 150 единиц (из расчета одной установки на лесосплавной рейд). Ожидаемый экономический эффект от внедрения установки 10 тыс. руб. Суммарный годовой экономический эффект по отрасли составит 1,5 млн. руб.
Фиг.1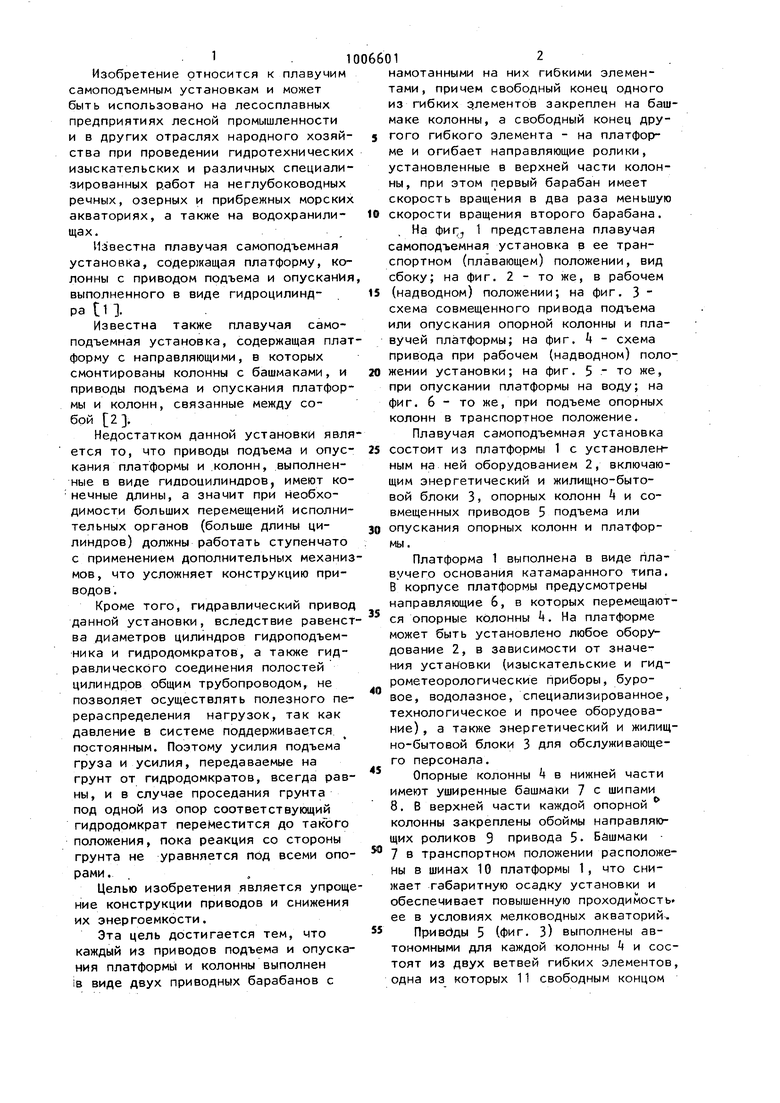
| название | год | авторы | номер документа |
|---|---|---|---|
| Опорно-подъемное устройство самоподъемной плавучей установки | 1981 |
|
SU1105453A2 |
| АГРЕГАТ КОЛТЮБИНГОВЫЙ ДЛЯ РЕМОНТА И ОБСЛУЖИВАНИЯ СКВАЖИН УГЛЕВОДОРОДНОГО СЫРЬЯ | 2019 |
|
RU2723425C1 |
| САМОПОДЪЕМНАЯ ПЛАТФОРМА | 1991 |
|
RU2010916C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2755358C1 |
| Опорная колонна плавучей самоподъемной платформы | 1982 |
|
SU1049616A1 |
| Способ монтажа опорных колонн самоподъемной плавучей буровой установки | 1983 |
|
SU1134471A1 |
| Плавающая грузоподъемная платформа | 1987 |
|
SU1528861A1 |
| ОПОРНАЯ КОЛОННА САМОПОДЪЕМНОЙ ПЛАВУЧЕЙ ПЛАТФОРМЫ СО СЪЕМНЫМ БАШМАКОМ И СПОСОБ СОЕДИНЕНИЯ УПОМЯНУТОЙ ОПОРНОЙ КОЛОННЫ С БАШМАКОМ | 1997 |
|
RU2133794C1 |
| Способ постройки и спуска самоподъемной плавучей буровой установки | 1982 |
|
SU1131759A1 |
| Опорно-подъемное устройство самоподъемной плавучей установки | 1981 |
|
SU982302A1 |

ПЛАВУЧАЯ САМОПОДЬЕМНАЯ УСТАНОВКА, содержащая платформу с направляющими, в которых смонтированы колонны с башмаками, и. приводы подъе ма и опускания платформы и колонн, связанные между собой, о т л и чающаяся тем, что, с целью упрощения конструкции приводов и снижения их энергоемкости, каждый из приводов подъема и опускания платформы и колонны выполнен в виде двух приводных барабанов с намотанными на них гибкими элементами, причем свободный конец одного из гибких элементов закреплен на башмаке колонны, а свободный конец другого гибкого элемейта - на платформе и огибает направляющие ролики, установленные в верх ней части колонны, при этом первый 6apa6ah f имеет скорость вращения в i два раза меньшую скорости вращения второго барабана.
Фиг. I.
Фиг.
fp«.4
L G
J
ft
Фиг.У
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Коробчатый воздушный змей | 1930 |
|
SU23777A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| () | |||
