/6,2
ел ю
ос 00
О5
е.;
Изобретение относится к гидротехническому строительству и может быть использовано при бурении разведочных скважин на шельфе морей и океанов, а также при производстве строительно-монтажных работ в море.
Цель изобретения - повышение надежности работы платформы путем предотвращения перегрузки отдельных ее стоек.
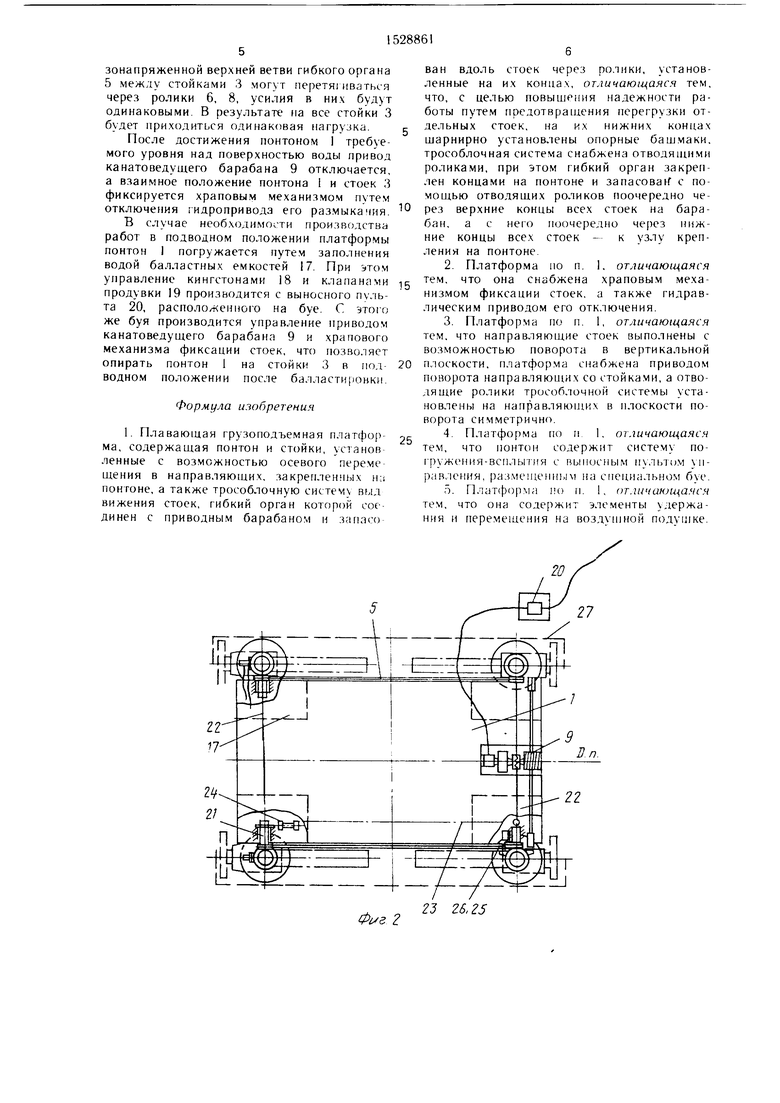
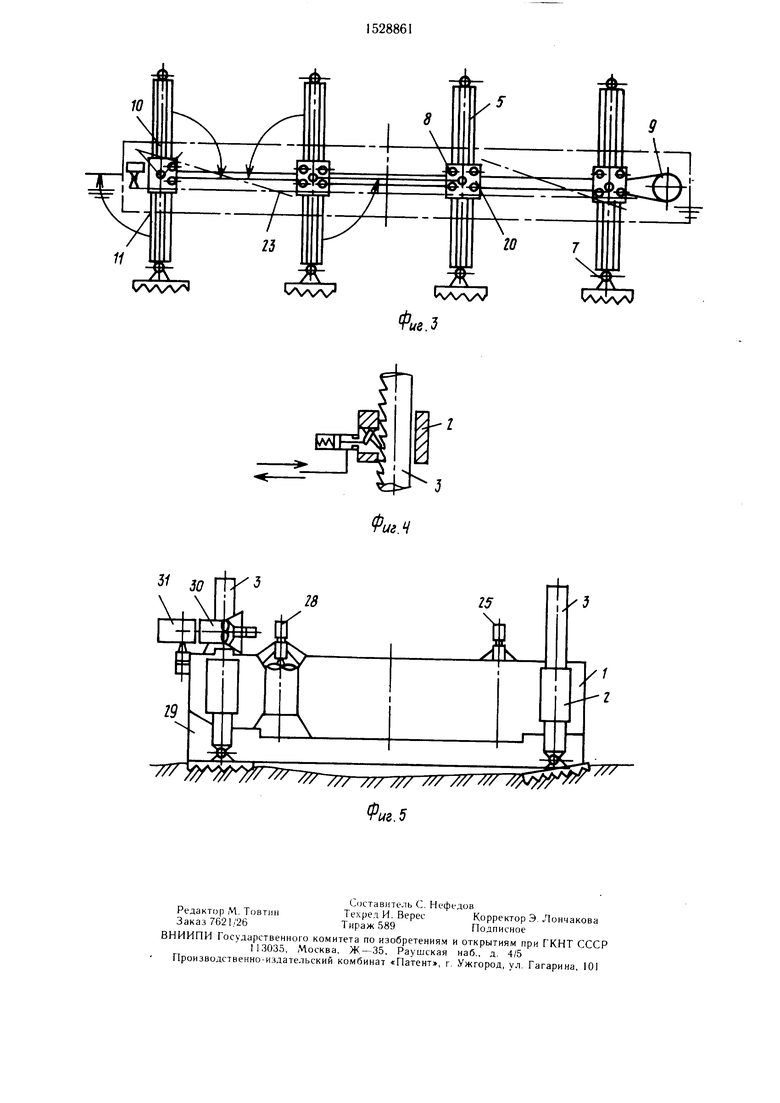
На фиг. 1 изображена предлагаемая платформа, общий вид; на фиг. 2 - план; на фиг. 3 - кине.матическая схема выдвижения стоек; на фиг. 4 - храповой механизм фиксации стоек; на фиг. 5 - исполнение предлагаемой платформы с : лемента- ми перемещения на воздушной подушке,
Плавающая грузоподъемная платформа содержит понтон 1 со смонтированными на нем направляющими 2. в которых уста новлены с возможностью осевого перемещения стойки 3. На концах стоек 3 шар- нирно закреплены опорные башмаки 4.
Платфор.ма снабжена трособлочной системой выдвижения стоек, включаюшей гибкий орган 5, направляющие ролики 6 и 7, расположенные соответственно на верхни.х и нижних концах стоек 3, а также от- водящие ролики 8. расположенные на направляющих 2. Система выдвижения стоек снабжена приводным канатоведущим барабаном 9. Гибкий орган 5 закреплен одним концом в узле 10 и запасован поочередно вдоль верхних участков каждой стой- ки 3 через их направляющие ролики 6 и отводящие ролики 8, а затем, охватывая барабан 9, через отводящие ролики 8 и направляющие ролики 7 - вдоль нижних участков каждой стойки 3 к узлу крепления 11 его второго конца. Для фиксации крайних положений стоек 3 при выдвижении они снабжены ограничителями 12.
С целью освобождения привода выдвижения стоек 3 от перегрузки после установки понтона 1 на заданном уровне стойки снабжены храповым механизмом фиксации их положения, содержащим собачки 13, кинематически связанные через систему шарнирных звеньев с поршнем 14 гидроцилиндра 15, Поршень 14 поджат в направлении замыкания храпового механизма пружиной 16.
Для перевода платфор.мы в подводное положение понтон 1 ocHanj.eH балластными емкостями 17 с кингстонами затопления 18 и клапанами продувки 19. Выносной пульт 20 управления кингстонами 18 и клапанами продувки 19 размешен на специальном буе.
Для перевода стоек 3 в походное по.ю- жение направляющие 2 закреплены к понтону I с воз.можностью поворота на осях 21 Механизм поворота включает валы 22 и шар- нирные звенья 23, а также гидро|.1илиндр 24, сочлененный рычагом с осью 21 одной из направляюших 2. Для фиксации направ
j.
g
0
о 5
0
5
0
5
ляющих в походном или рабочем положа НИИ они снабжены щтырями 25, с гидроцилиндрами 26. В походном положении стойки 3 защищены ограждением 27.
Для удобства работы в прибрежной зоне платформа оснащена устройствами для пере- М(мцения на воздушной подущке, включая вентиляторы 28, подающие сжатый воздух через щахты под днище понтона 1, а также гибкую завесу 29, закрепленную по его периметру. На понтоне I смонтирована также движительная вентиляторная установка 31., за которой установлена поворотно на вертикальной оси рулевая плоскость 31.
Плавающая грузоподъемная платформа работает следующим образом.
По прибытии на точку производства работ направляющие 2 со стойками 3 переводятся из походного в рабочее положение. Для этого гидроцилиндром 26 производится расштыривание направляющих 2, после чего они поворачиваются гидроцилиндром 24 до принятия стойками 3 вертикального положения. В этом положении направляющие 2 вновь фиксируются с помощью механизма защтыривания.
Для опускания стоек производится размыкание храпового механизма. С этой целью включается подача рабочего тела в гидро- ци,пиндр 15. Пружина 16 поджимается, во;1действуя через систему шарнирных звеньев па собачку 13. Последняя освобождает стойку 2, после чего та оказывается Г01ОВОЙ к выдвижению.
Выдвижение стоек обеспечивается включением канатоведущего барабана 9, который, вращаясь (на фиг. 3 по часовой стрелке), перематывает гибкий орган 5. При этом длина ветви гибкого органа, охватывающей ве)хние участки стоек 3 уменьшается, а д, 1ина ветви, охватывающей их нижние участки увеличивается, в рез льтате, чего стойки опускаются.
По достижении опорным бац.маком одной из стоек грунта опускание ее прекратится. После этого гибкий орган 5 перематывается через ее направляющий ролик 7 без измене1шя длины своего участка, охватывающего нижнюю часть этой стойки. Дальнейшее же увеличение длины нижней ветви гибкого органа 5, происходящее вследствие его сма1ывания с барабана 9, приводит к ускоренному опусканию стоек, еще не достигших грунта. После достижения рунта всеми стойками 3 дальнейшая перемотка барабаном 9 гибкого органа 5 и сокращение его верхней ветви, огибающей ролики 6, приведет к натяжению последней, а затем к подъему понтона 1, при сохранении им горизонтального положения.. В процессе подъема вес понтона 1 передается через гибкий орган 5 и ролики 6 на стойки 3, а с них через башмаки 4 на грунт. Поскольку при это.м участки грузонапряженной верхней ветви гибкого органа 5 между стойками 3 могут перетя иваться через ролики 6, 8, усилия в них будут одинаковыми. В результате на все стойки 3 будет приходиться одинаковая нагрузка.
После достижения понтоном I требуемого уровня над поверхностью воды привод канатоведущего барабана 9 отключается, а взаимное положение понтона 1 и стоек 3 фиксируется храповым механизмом путем отключения гидропривода его размыкания.
В случае необхолимо1. ти производства работ в подводном положении платформы понтон 1 погружается путем заполнения водой балластных емкостей 17. При управление кингстонами 18 и клапанами продувки 19 производится с выносного пульта 20, расположенного на буе. Г. этого же буя производится управление приводом канатоведущего барабана 9 и храпового механизма фиксации стоек, что позволяет опирать понтон I на стойки 3 в подводном положении после балластировки.
Формула изобретения
1. Плавающая грузоподъемная платформа, содержащая понтон и стойки, установ ленные с возможностью осевого переме щения в направляющих, закрепленных ни понтоне, а также трособлочную систему выд Бижения стоек, гибкий орган которой соединен с приводным барабаном и запасо
0
5
ван вдоль стоек через ролики, установленные на их концах, отличающаяся тем, что, с целью повышения надежности работы путем предотвращения перегрузки отдельных стоек, на их нижних концах щарнирно установлены опорные башмаки, трособлочная система снабжена отводящими роликами, при этом гибкий орган закреплен концами на понтоне и запасоваьГ с помощью отводящих роликов поочередно через верхние концы всех стоек на барабан, а с него поочередно через нижние концы всех стоек - к узлу крепления на понтоне.
2.Платформа по п. 1, отличающаяся тем, что она снабжена храповым механизмом фиксации стоек, а также гидравлическим приводом его отключения.
3.Платформа по п. 1, отличающаяся тем, что направляющие стоек выполнены с возможностью поворота в вертикальной плоскости, платформа снабжена приводом попорота направляющих со стойками, а отводящие ролики трособлочной систе.мы установлены на нап|завляюии{х в плоскости поворота симметрично.
4.Платформа по п. 1, отличающаяся тем, что понтон содержит систему по- г ружения-вспльпия с выносным пультом управления, размещенном на специальном буе.
5.Платформа но п. 1, отличающаяся тем, что она содержит элементы удержания и перемещения на воздуп ной подушке.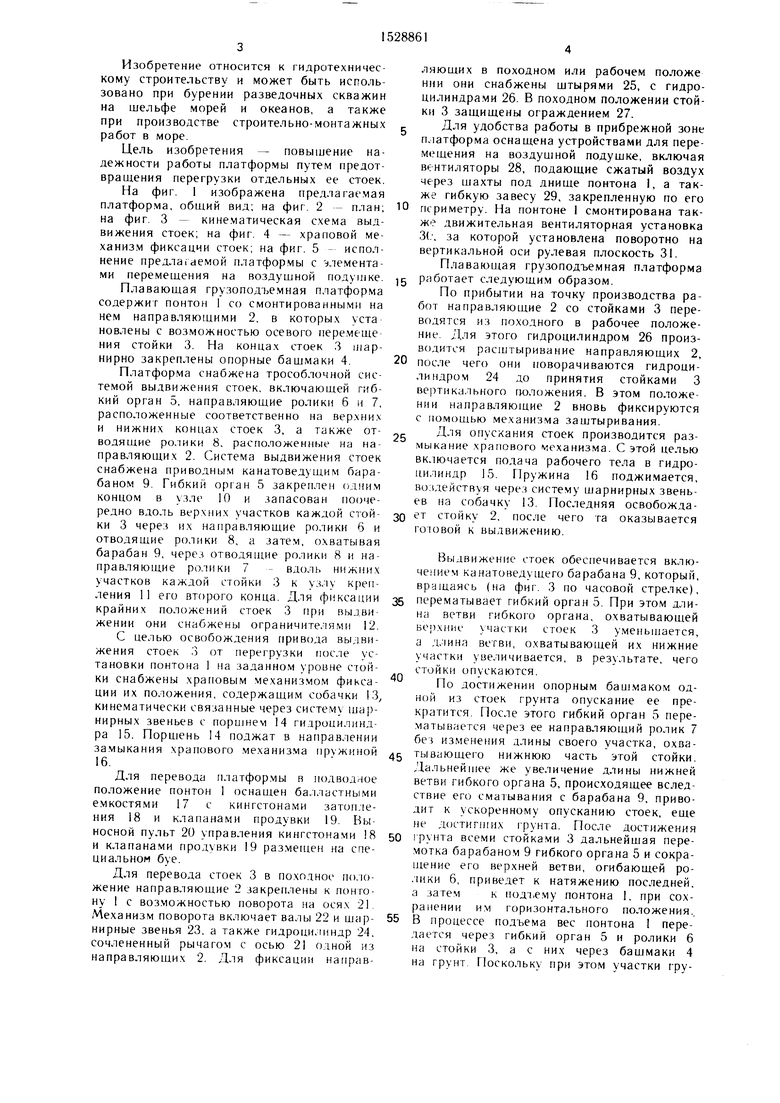
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемная установка для обслуживания нефтяных скважин | 1991 |
|
SU1774985A3 |
| Плавучая буровая установка | 1991 |
|
SU1801161A3 |
| Посадочное устройство вертолета | 1989 |
|
SU1819807A1 |
| Подъемные подмости | 1980 |
|
SU939688A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |
| БУКСИРУЕМОЕ ШАГАЮЩЕЕ УСТРОЙСТВО | 1990 |
|
RU2019464C1 |
| СПОСОБ ПОГРУЗКИ И РАЗГРУЗКИ ДЛИННОМЕРНОГО ГРУЗА С ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2057660C1 |
| Устройство для продвижения бревен по воде | 1987 |
|
SU1474060A1 |
| УСТРОЙСТВО ДЛЯ СТРОИТЕЛЬСТВА ПОКРЫТИЯ | 1992 |
|
RU2038442C1 |
| СПЛОТОЧНОЕ УСТРОЙСТВОШСШОЮЗНАЯ | 1972 |
|
SU337319A1 |
Изобретение относится к гидротехническому строительству. Цель изобретения - повышение надежности работы путем предотвращения перегрузки опорных стоек. На понтоне 1 смонтированы направляющие 2 со стойками 3. На нижних концах стоек 3 закреплены опорные башмаки 4. Платформа снабжена трособлочной системой выдвижения стоек, гибкий орган 5 которой закреплен концами на понтоне 1 и запасован поочередно вдоль верхних участков каждой стойки 3 на канатоведущий барабан и затем - поочередно вдоль нижних участков каждой стойки 3. Выдвижение стоек 3 осуществляется включением барабана, который перематывает гибкий орган 5 с верхних участков стоек 3 на нижние. Наличие единого гибкого органа 5 уравнивает усилия в стойках 3, благодаря чему исключаются их перегрузки. По окончании выдвижения стойки 3 фиксируются храповым механизмом. 4 з.п. ф-лы, 5 ил.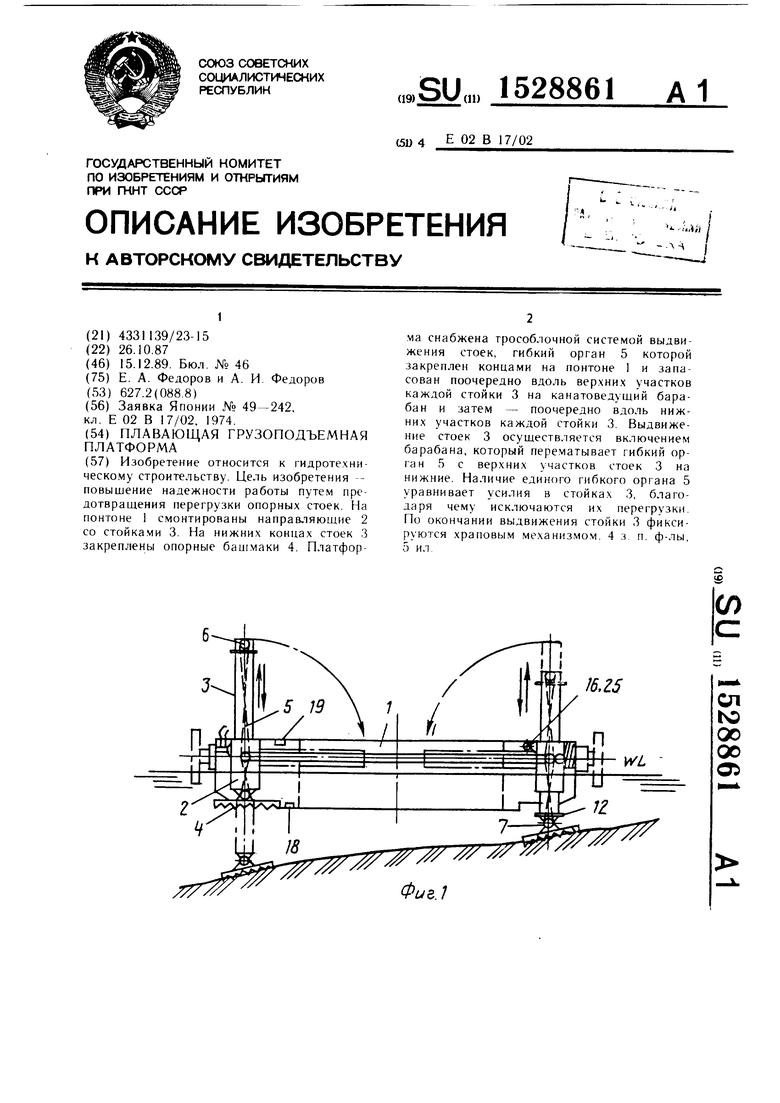
ЙУг 2
ZJ Z6,2S
kAA/V
//X
.г.
АлХА
5
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
