сд
4
сл
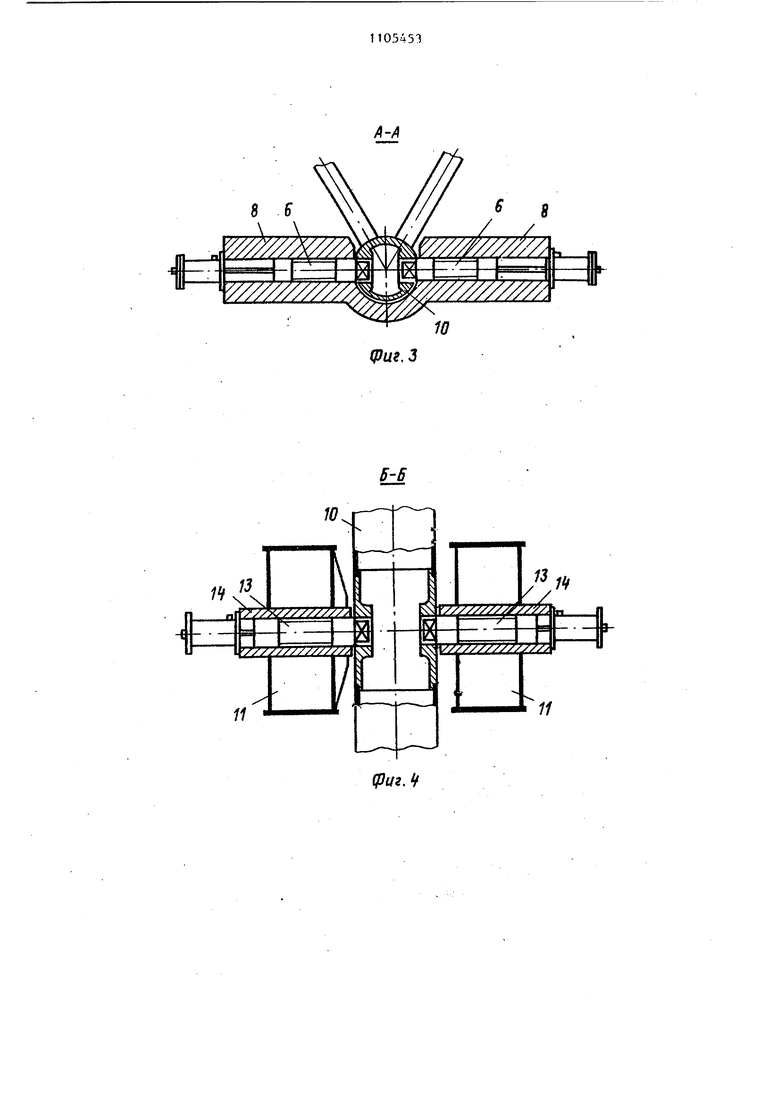
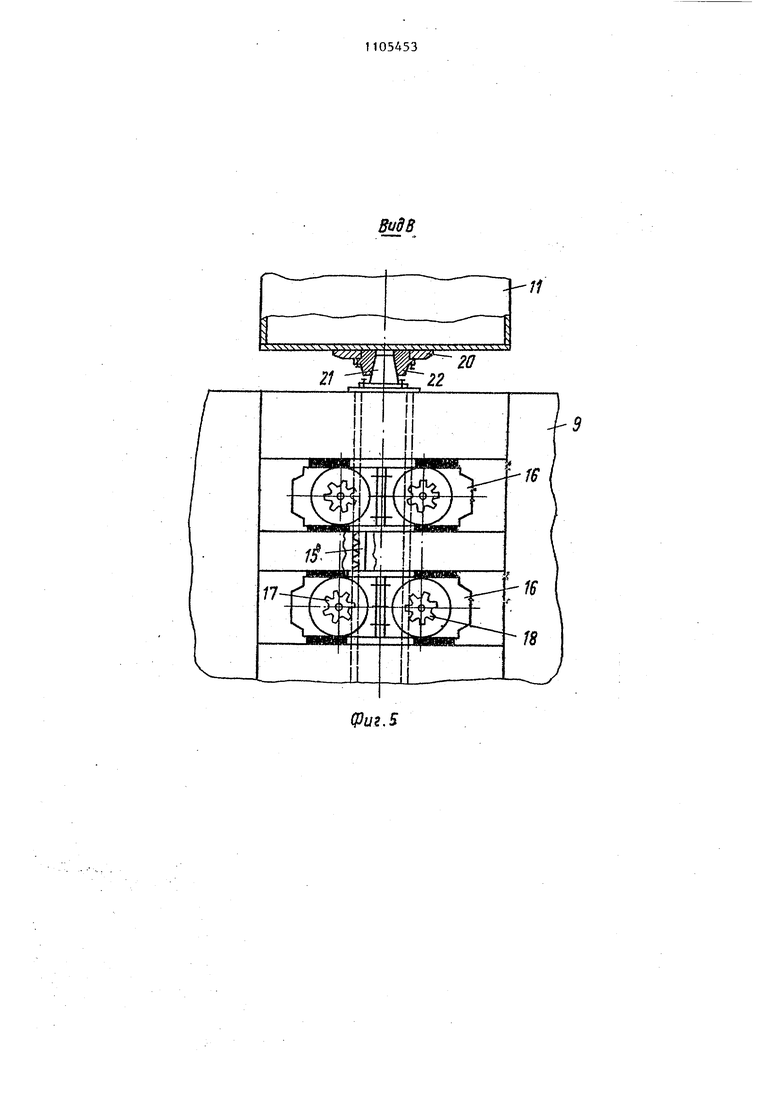
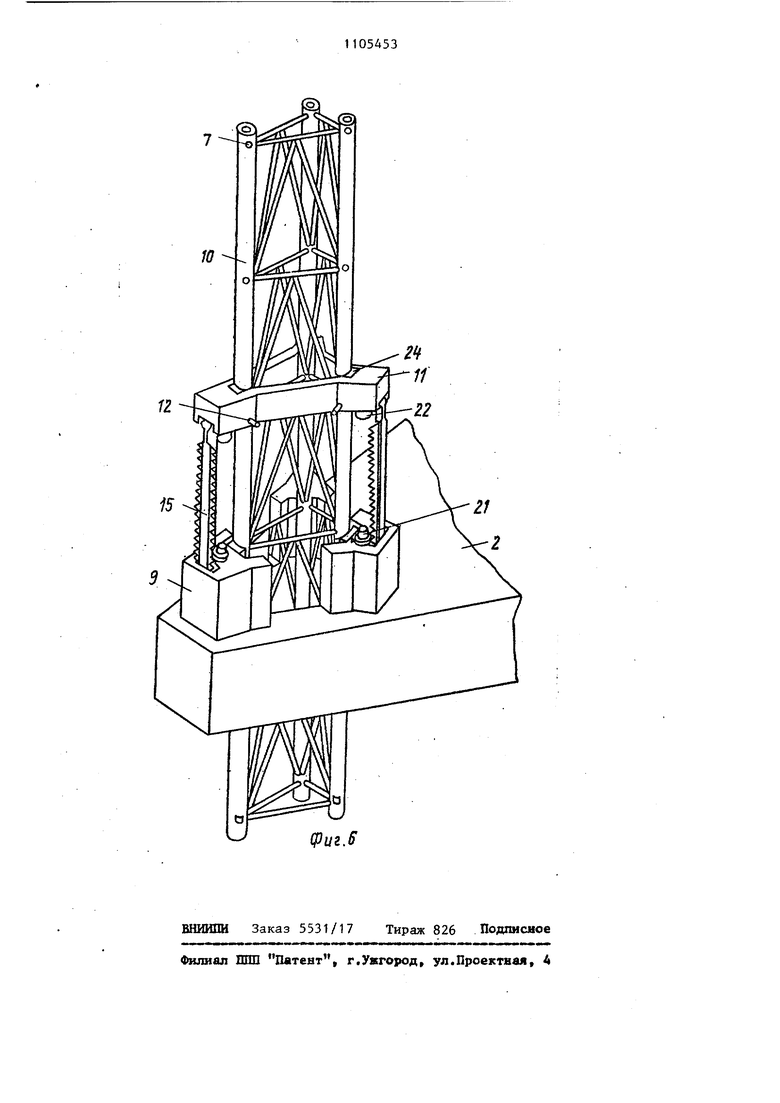
00 I Изобретение относится к плавучим платформам самоподъемного типа, в частности к ршиболее важной части плавучей самоподъемной платформы опорно-подъемным устройствам. По основному авт.св. № 982302 из вестно опорно-подъемное устройство, предназначенное для относительного перемещения корпуса платформы на опорных колоннах и задавливания последних во дно водоема. Известное ОПУ содержит вертикальные опорные колонны, пропущенные через проемы плавучей платформы и прикрепленные к ней опорные рамы с возможностью п ремешения относительно последних,пр этом каждая из опорных колонн имеет подвижную траверсу, к которой шарни но присоединены верхними концами зу чатые рейки, взаийодействуюгцие с приводными механизмами, смонтирован ными на опорных рамах, а плавучая платформа и подвижные траверсы имею механизмы фиксирования из относитес ,но опорных колонн. Указанные опорны рамы снабжены направляющими, выполненными по форме контактирующих с н ми поверхностей опорных колонн, а подвижные траверсы выполнены с консольными выступами, с которыми соед нены зубчатые рейки, размещенные с наружной стороны опорных рам, ji для дсоторых в платформе вьтолнены верти кальные гнезда. В процессе эксплуатации платформы ее буксируют к мест постановки на точку бурения, где указанным ОПУ опускают опорные колонны до дна. Далее последовательно опорную колонну задавливают в дно путем перемещения вниз опорно-подъем ным устройством, в котором зубчатая рейка приводится в движение зубчаты ми колесами с силовыми редукторами. Причем количество зубчатых колес и редукторов зависит от весогабаритных характеристик платформы и опорных колонн. Из практики эксплуатации самоподъемных плавучих платформ известно, что при нахождении платформы в походном положении, т.е. когда опорные колонны матссимально подняты возможны значительные горизонтапьные нагрузки, обусловленные колебаниями опорных колонн при волнении моря или при ветрах. Горизонтальные нагрузки имеют характер моментов, верхняя сила которых действует на опорную раму платформы, а нижняя нагрузка действует в обратном направлении и 32 прилегается к нижней кромке стенки проема понтонной платформы. Известно также, что для уменьшения ВЕЛИЧИНЫ этих горизонтальных усилий стремятся увеличить плечо между ними, т.е. стремятся по возможности максимально удалить точки приложения этих сил. Для этого на палубе платформы, а также со стороны ее днища крепятся различные опорные кронштейны ij. Однако увеличение размеров опорных рам по высоте требует увеличения металлоемкости устройства, к тому же такая мера не обеспечивает компактность и надежность устройства в целом. Целью изобретения является обеспечение надежности платформы и снижения металлоемкости. Поставленная цель достигается тем, что устройство снабжено фиксирующими приспособлениями для фиксации траверсы относительно опорной колонны, при этом на внутренних сторонах траверсы выполнены направляющие с профилем, соответствующим профилю .поверхности опорной колонны. Кроме того, в опорно-подъемном устройстве каждое фиксирующее приспособление выполнено из конических штырей и конических отверстий, соответственно няя.;щящихся на нижней стороне консол. jix выступов и на поверхности опорной рамы. На фиг.1 схематически изображена самоподъемная плавучая платформа, поднятая над уровнем моря на опорных колоннах, вид сбоку; на фиг.2 фрагмент плавучей платформы с опорной колонной, в увеличенном масштабе; на фиг.З - разрез А-А на фиг.2; на фиг.4 разрез Б-Б на фиг.2; на фиг.З - вид В на фиг.2; на фиг.6 - аксонометрическое изображение опорно-подъемного устройства, в увеличенном масштабе. Плавучая самоподъемная платформа, на которой используются опорно-подъемные устройства 1, содержит собственно понтонную платформу 2, имеющую вертикальные проемы 3, или колодцы, в которых расположены опорные колонны 4 или ноги. Опорные колонны 4 помещены в вертикальные проемы 3 с зазором так, что они могут перемещаться вверх или вниз. Для фиксации опорных колонн 4 относительно понтонной платформы 2 имеются известного типа фиксирующие приспособления 5, каждое из которых образовано штыря3ми 6, подвижными в горизонтальной плоскости, и отверстиями 7, которые выполнены на поверхностях опорных колонн 4. Направляющие втулки 8 штырей 6 жестко связаны с понтонной платформой 2, Каждый проем 3 обрамлен опорной рамой 9. В зависимости от назначения и конфигурации плавучая платформа может иметь несколько, от 3 и более, опорньк колонн 4. Приэтом опорные колонны 4 в поперечном сечении могут иметь различный профиль. Опорные колонны 4 имеют треугольную ферменну конструкцию, по углам каждой из кото рых установлены трубчатые стойки 10. Опорно-подъемное устройство содержит траверсу 11, которая свободно охватывает соответствующую опорн.ую колонну 4 и имеет возможность переме1цаться вниз - вверх относительно последней. Для фиксации траверсы 11 относительно опорной колонны 4 имеют ся фиксируюпще приспособления 12, образованные подвижными штырями 13 и отверстиями 7. Направляющие втулки 14 штьфей 13 жестко прикреплены к траверсе 11, а взаимодействующие со штырями 13 отверстия 7 выполнены на трубчатых стойках 10 опорных колонн 4. Траверса 11 несет по меньшей мере три двусторонние зубчатые рейки 15, которые своими верхними концами шарнирно прикреплены к траверсе 11. В каждой опорной раме 9 установле ны приводные механизмы 18, имеющие приводные шестерни 17 и 18. Приводные шестерни 17 и 18 попарно взаимодействуют с указанными двусторонними зубчатыми рейками 15. Со стороны палубы понтонной платформы 2, в последней выполнены глухи вертикальные гнезда 19, служащие для прохода зубчатых реек 15 при опускании соответствующей опорной колонны 4 и соответственно при подъеме понтонной платформы 2. На нижних сторонах консольных выступов 20 траверсы 11 и на верхних поверхностях опорных рам 9 имеются взаимодействующие элементы (штыри 21 и втулки 22) фиксирующего приспособления 23, образованного вертикальными коническими штьфями 21 и втулками 22 с коническими отверстиями. Конические штыри 21 вертикально установлены на поверхностях опорных рам 9, и втулки 22 прикреплены на нижних 534 поверхностях консольных выступов 20 траверсы 11. На внутренних сторонах траверсы 11 установлены направляющие вкпадыши 24, имеющие профиль, соответствующий участку поверхности трубчатой стойки 10 опорной колонны 4. Опорноподъемное устройство плавучей платформы работает следующим образом. В исходном положении плавучей платформы опорные колонны 4 подняты и зафиксированы от вертикальных перемещений относительно понтонной платформы 2 фиксирующими приспособленйями 5. Траверса 11 каждого опорноподъемного устройства 1 находятся в Нижнем положении, т.е. вблизи от поверхностей опорных рам 9. По достижении мест.проведения на дне моря работ плавучей платформы осуществляют подъем последней. Для этого включают приводные механизмы 16, шестерни 17 и 18 которых, взаимодействуя с зубчатыми рейками 15, поднимают соответствующую траверсу 11 (холостой ход) и фиксируют относительно опорной колонны 4 фиксирующим приспособлением 12. При этом штыри 13 вводят в йтверстия 7, имеютциеся на трубчатых стойках 10 опорных колонн 4. Манипулируя фиксирующими приспособлениями 5, освобождают каждую опорную колонну относительно платформы 2. Реверсивно включают приводные механизмы 16, шестерни 17 и 18 которых, вращаясь в обратную сторону и взаимодействуя с зубчатыми рейками 15, увлекают последние вниз. Опорная колонна 4, связанная через траверсу 11 с зубчатыми рейками также опускается (рабочий ход). По окончании хода зубчатых реек 15 вниз опорную колонну 4 фиксирующими приспособлениями 5 фиксируют от вертикального перемещения относительно понтонной плaтфop iы 2. Траверсу 11 освобождают относительно опорной колонны 4, для чего каждый штьфь 13 извлекают из соответствующего отверстия 7 на трубчатой стойке 10 опорной колонны 4. Реверсивно включают приводные механизмы 16, шестерни 17 и 18 которых, взаимодействуя с зубчатыми рейками 15, поднимают траверсу 11 (холостой ход). В дальнейшем цикл опускания опорных колонн дискретно повторяют. По достижению башмаками 25 опорн колонн 4 дна моря, опускание послед продолжают до их устойчивого упора. После того, как все опорные коло ны 4 относительно жестко упрутся в дно моря, понтонная платформа 2, опираясь на опорные колонны 4, начнет подниматься. Установив этот факт, понтонную платформу 2 нагружают бапластом. Для этого в полость понтонной платформы 2 нагнетают морскую воду в количестве примерно равном весу понтонной платформы 2. Снова опускают опорные колонны 4 и под действием опорноподъемных устройств 1 и веса платформы с балластом опорные колонны 4 максимально заглубляются в грунт. После прекращения заглубления опорных колонн 4 балласт сбрасываетс Приводные механизмы 16 включают на опускание опорных колонн, при этом, поскольку колонны вертикально неподв -1жны, понтонная платформа, опираясь -на них, поднимается над уровнем моря. Осухцествляя несколько циклов подъема платформы, последнюю поднимают на заданную высоту над уровнем моря. В процессе работы опорно-подъемного устройства 1 конец конич кого штыря 21 не доходит до конического отверстия втулки 22, т.е. фиксирующее приспособление 23 не срабатывает Это объясняется тем, что ход траверсы 11 имеет длину меньшую, чем рас-стояние между концом конического штыря 21 и отверстием конической втулки 22 при крайнем верхнем положении траверсы 11. Это достигается известнь)ми средствами автоматики, например, с помощью путевых выключателей (не показаны), управляющих фиксируюшлми приспособлениями 5 и 12, соответственно фиксации опорной колонны 4 относительно понтонной платформы 2 и траверсы 11 относительно опорной колонны 4. При переводе плавучей платформы из стационарного в походное положение опорные колонны 4 поднимаются в крайнее верхнее положение, и фиксируются относительно понтонной платформы 2. В походном положении ход траверсы 11 вниз больше расстояния между концом конического штыря 21 и отверстием втулки 22. Таким образом, при опускании траверсы 11 и ее укладки на опорную раму 9, конические штыри 21 входят в конические отверстия втулок 22, жестко закрепленных на опорных рамах 9. Благодаря этому траверса 11 и опорная рама 9 оказываются жестко связанными. Этими исключается горизонтальное мещение траверсы 11 и, следоательно, охваченной ею опорной коонны 4. Реализ1...;ия изобретения позволит овысить надежность эксплуатации саоподъемной буровой установки при ереходе морем с поднятыми опорными олоннами. Ж-ЖЛ ь . , Г stv II 41 I П
руг.; ч .f у
Ж ///////// :
/
10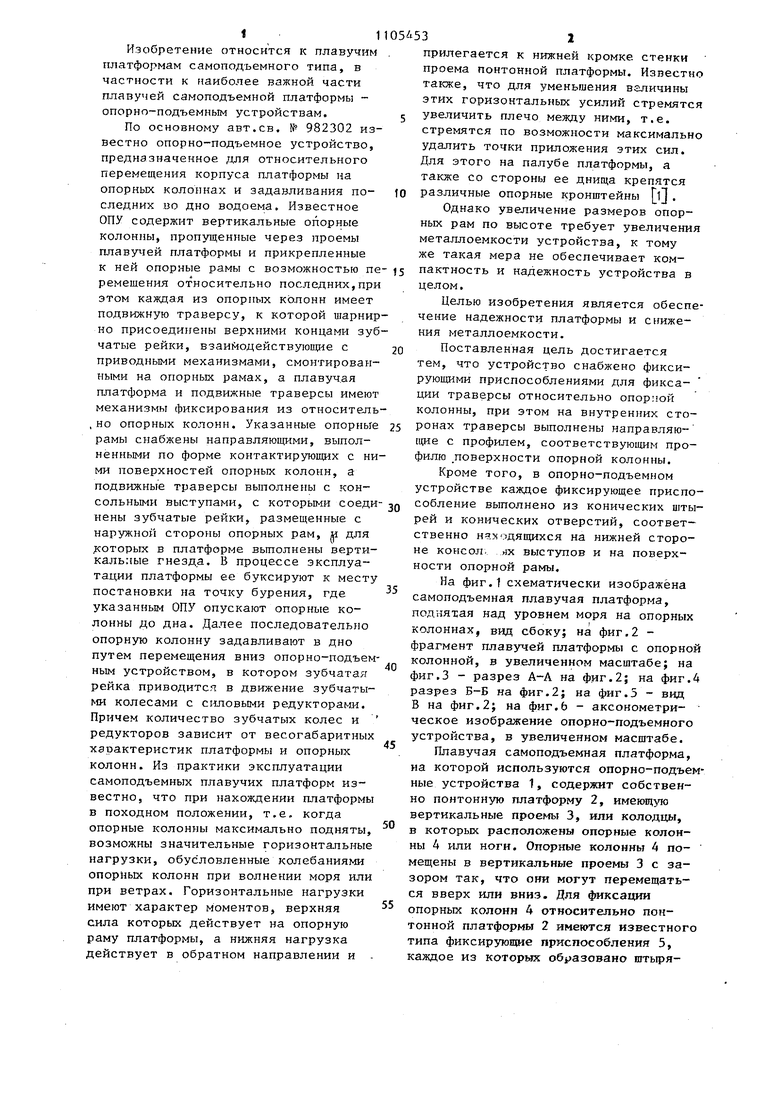
| название | год | авторы | номер документа |
|---|---|---|---|
| Опорно-подъемное устройство самоподъемной плавучей установки | 1981 |
|
SU982302A1 |
| Опорно-подъемное устройство для самоподъемной установки | 1983 |
|
SU1109500A1 |
| Опорно-подъемное устройство самоходной плавучей установки | 1982 |
|
SU1154854A2 |
| Устройство для управления опорно-подъемным механизмом самоподъемной установки | 1983 |
|
SU1263609A1 |
| Опорно-подъемное устройство самоподъемной плавучей платформы | 1987 |
|
SU1470856A1 |
| Опорно-подъемное устройство самоподъемной плавучей установки | 1981 |
|
SU1045513A2 |
| Стопорное устройство для закрепления платформы в рабочем положении | 1985 |
|
SU1273445A1 |
| Самоподъемная плавучая установка | 1988 |
|
SU1634754A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ОПОРНЫХ КОЛОНН САМОПОДЪЕМНОЙ ПЛАВУЧЕЙ ПЛАТФОРМЫ | 1998 |
|
RU2140489C1 |
| Опорно-подъемное устройство для самоподъемной плавучей буровой установки | 1986 |
|
SU1313950A1 |

1. ОПОРНО-ПОДЪЕМНОЕ УСТРОЙСТВО САМОПОДЪЕМНОЙ ПЛАВУЧЕЙ УСТАНОВКИ по авт.св. № 982302, отличающееся тем, что, с целью обеспечения надежност и платформы и снижения металлоемкости, оно снабжено фиксирующими приспособлениями для фиксации траверсы относительно опорной колонны, при этом на внутренних сторонах траверсы выполнены направляющие с профилем, соответствующим профилю поверхности опорной колонны. 2. Опорно-подъемное устройство по п. 1, отлича. ющееся тем, что каждое фиксирующее приспособление , выполнено из конических щтырей и конических отверстий, соответственно находящихся на нижней стороне консольных выступов и на поверхности опорной Q рамы. (Л
11
(ри,В
12
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3224633/27-11, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
