SSS
/ 5
Изобретение относится к захватным устройствам промышленных роботов.
Известен захват, содержащий губки с хвостовиками, установленные шарнирно на корпусе и снабженные возвратной пружиной, и привод, включающий шток и поршень с рабочей поверхностью, выполненной по форме клина. Хвостовики снабжены направляющими роликами 1 .
Однако конструкция данного захвата сложна. Кроме того, она не обеспечивает различные усилия при схватывании, что снижает ее технологические возможности.
Цель изобретения - упрощение конструкции и расширение технологических возможностей путем обеспечения различных усилий при схватывании деталей.
Поставленная цель достигается тем, что в захвате, содержащем губки с хвостовиками, установленные шарнирно на корпусе, и привод, включающий шток и поршень с рабочей поверхностью в виде клина, хвостовики губок представляют собой постоянные магниты, обращенные друг к другу разноименными полюсами, а поршень представляет собой постоянный магнит, нейтральная плоскость которого проходит через ось поршня, при этом полюсы магнита поршня обращены к одноименным полюсам магнитов хвостовиков губок.
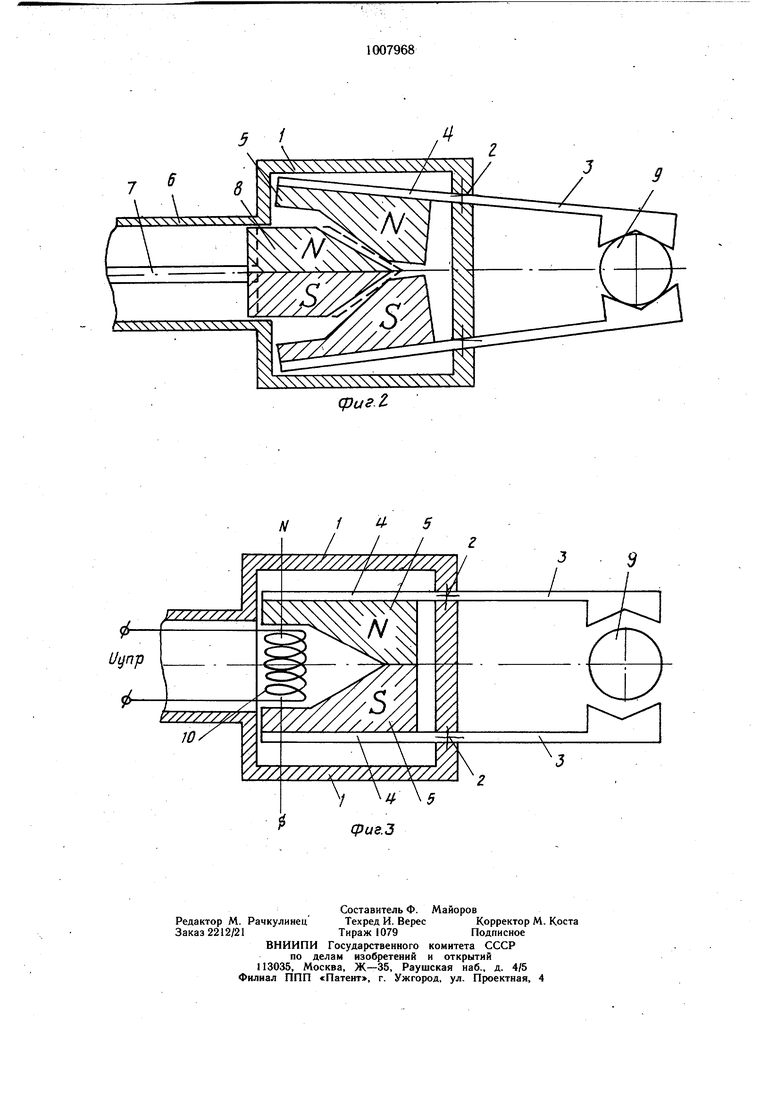
На фиг. 1 показан предлагаемый захват, общий вид; на фиг. 2 - элементы захвата в рабочем положении; на фиг. 3 - привод губок, выполненный в виде электромагнита.
.Захват (фиг. 1) содержит расположенные в корпусе 1 на шарнирах 2 губки 3 с хвостовиками 4, на которых установлены постоянные магниты 5, обращенные друг к другу разноименными полюсами. Привод представляет собой пневмоцилиндр 6 с расположенным в нем на штоке 7 порщнем. Поршеньпредставляет собой постоянный магнит 8, полюсы которого разделены плоскостью, проходящей по оси поршня, при этом полюсы магнита поршня обращены к одноименным нолюсам магнитов хвостовиков. Позицией 9 обозначена схватываемая деталь.
При положении- всех элементов захвата, указанных на фиг. 1, последний находится в исходном состоянии: приводные магниты 8 зафиксированы магнитными силами отталкивания между полюсами магнитов 5 и 8, хвостовые магниты 5 притянуты друг к другу и губки 3 раскрыты, деталь 9 не зажата.
При положении всех элементов захвата, указанных на фиг. 2, последний находится в рабочем состоянии, деталь 9 зажата.
Привод губок может быть выполнен в виде электромагнита 10.
Захват работает следующим образом. При включении привода магнит 8 вдвигается в паз. Напротив каждого из магнитов 6 устанавливается магнит 8 одноименной полярности, .вследствие чего между ними возникают силы отталкивания, которые должны в сумме превысить силу взаимного притяжения магнитов 5. Последние раздвигаются, а губки 3 закрываются. При отключении привода магнитные силы между одноименными магнитами 5 выталкивают магнит 8. Магниты 5 по мере выталкивания магнита 8 сходятся друг к другу вследствие
силы притяжения между ними и захват возвращается в исходное состояние.
Благодаря упругим свойствам магнитного поля деталь 9, зажатая в захвате, может перемешаться относительно указанной на чертежах оси захвата на сборочной позиции,
0 что позволяет применить для сборки способы самоориентирования деталей, повышая тем самым надежность процесса сборки.
В случае жесткой фиксации детали относительно указанной оси при захвате детали достаточно осуществить выборку (ликвидацию) зазора между магнитами 5 и 8, доведя магнит 8 после зажатия детали до упора с магнитами 5 (на фиг. 2 обозначено пунктиром).
Размеры пневмоцилиндра и магнитов,
Q форма полюсов магнитов и их силовые качества должны быть такими, чтобы в исходном состоянии обеспечивалась надежная фиксация магнитов 8, а при их вдвижении в паз суммарный вектор силы отталкивания между одноименными полюсами магнитов 5
5 и 8 превысил силу взаимного притяжения между магнитами 5.
При выполнении привода губок в виде электромагнита 10 при включении его возникает электромагнитное поле указанной на фиг. 3 полярности, т. е. напротив каждого
0 из магнитов 5 образуется одноименный полюс электромагнита. Так как одноименные полюсы отталкиваются; магниты 5 раздвигаются, а губки 3 закрываются. При отключе1А1И электромагнита магниты 5, приj тягиваясь друг к другу, сдвигаются, а губки 3 раскрываются.
Наличие магнитной связи между приводом и губками взамен кинематической упрощает, в первую очередь, изготовление и последующую сборку захвата, так как отпадает необходимость в изготовлении ряда деталей, и расщиряет технологические возможности захвата, обеспечивая различные усилия при схватывании детали.
gjus.Z ч v ХУ-УчХЧХЧХЧУЧХХЧУчУ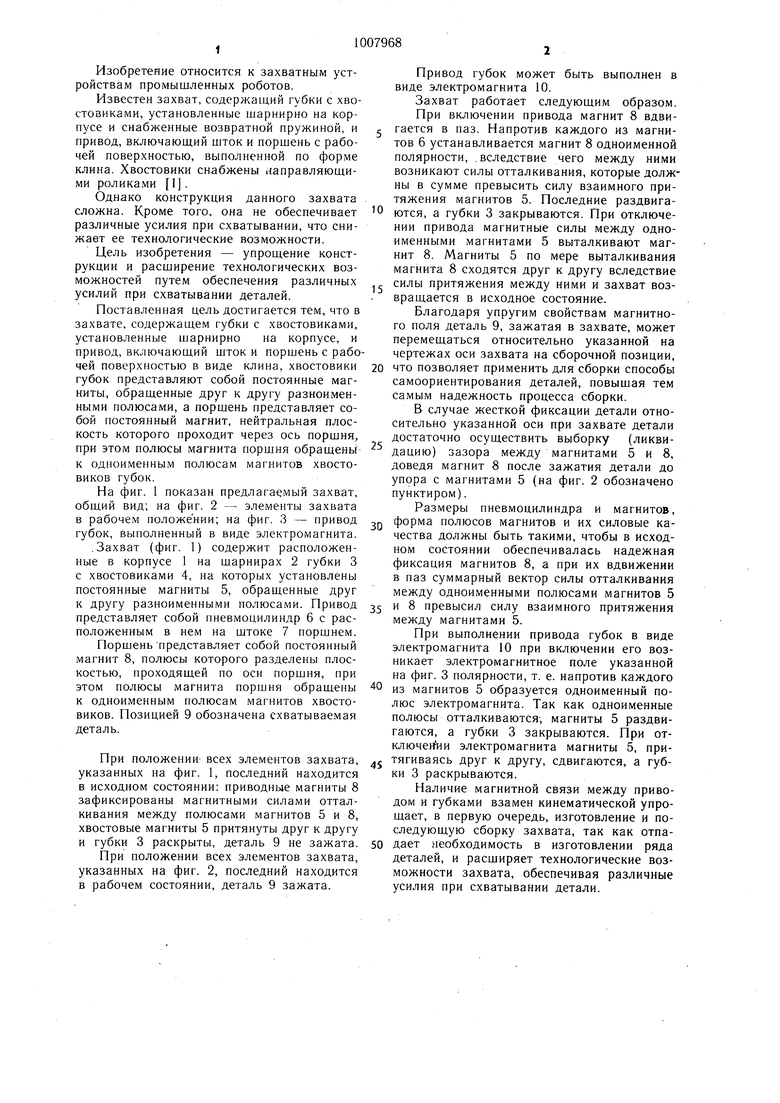
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| Свободнопоршневой компрессор | 1990 |
|
SU1753031A1 |
| Захват манипулятора | 1983 |
|
SU1090548A1 |
| Пневматический индикатор | 1987 |
|
SU1509654A1 |
| Гидравлический аккумулятор | 1979 |
|
SU850941A2 |
| ПРИВОД КЛАПАНОВ ГАЗОРАСПРЕДЕЛЕНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2606723C1 |
| ХОЛОДИЛЬНЫЙ АППАРАТ С ПЛАСТМАССОВОЙ ФРОНТАЛЬНОЙ РАМКОЙ | 2006 |
|
RU2401402C2 |
| Объемная регулируемая гидромашина | 1980 |
|
SU885611A1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ НАГРУЗКИ | 2013 |
|
RU2525806C1 |
| МАГНИТНАЯ ЗАЩЕЛКА | 2014 |
|
RU2697279C2 |
ЗАХВАТ, содержащий губки с хвостовиками, установленные шарнирно на корпусе, и привод, включающий щток и поршень с рабочей поверхностью г вило клии. отличающийся тем, что, с целью упрощения конструкции и расп ирепия технологических возможностей нуте.м обеспечения различных усилий при схватывании деталей, хвостовики губок представляют собой постоянные магниты, обращенные друг к другу разноименными полюсами, а поршень представляет собой постоянный магнит, нейтральная плоскость которого проходит через ось порщня, при этом полюсы .MfirHHTa поршня обращены к одноименным полюсам магнитов хвостовиков губок.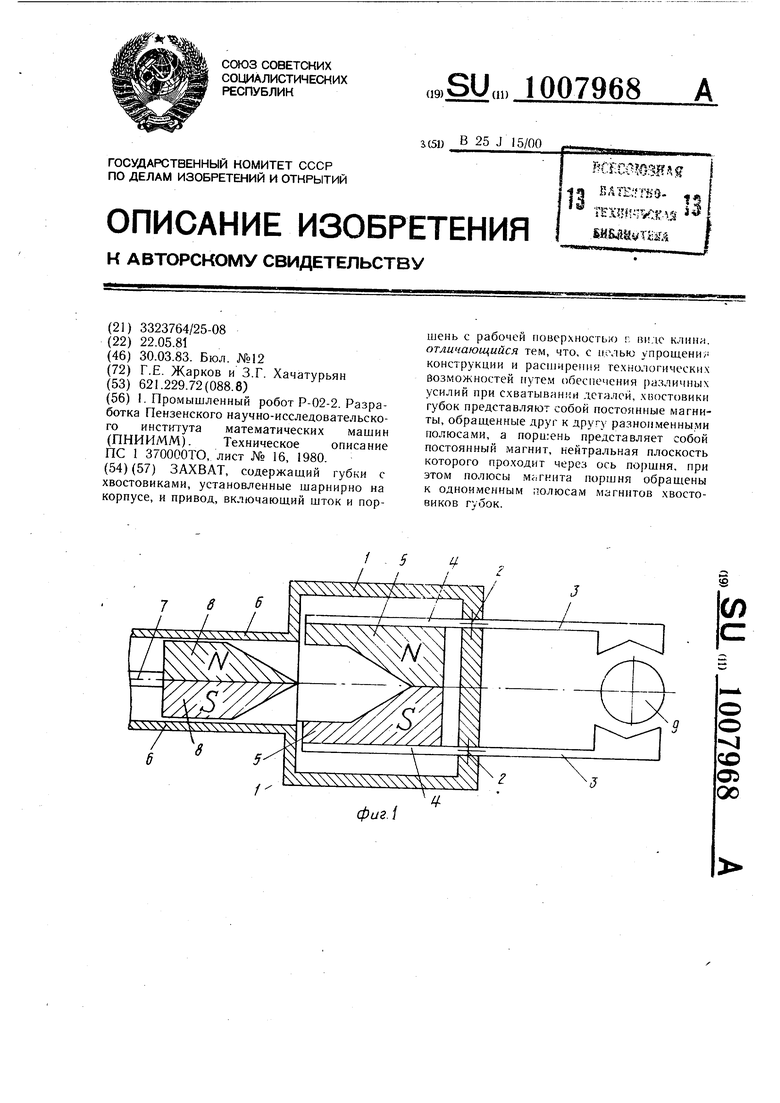
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разработка Пензенского научно-исследовательского института математических машин (ПНИИММ) | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
