8 If
2. Схват, содержащий два двуилечих рычага, на одном плече каждого из которых установлены губки, а на Другом - основные постоянные магниты, и привод, включакяций шток и поршень, отличающийся тем, что, с целью обеспечения жесткой ориентации губок в исходном состоянии, он снабжен пластиной из ферромагнитного материала, эакрепленной в поршне вдоль, его оси, при
этом основные постоянные магниты обращены друг к другу одноименными полюсами и при сведении губок внутренние поверхности магнитов образуют зазор для захода пластины, а наружные поверхности образуют клин, при этом поршень выполнен из немагнитного материала и форма его рабочей поверхности соответствует форме клина, образованного основными постоянными магнитами.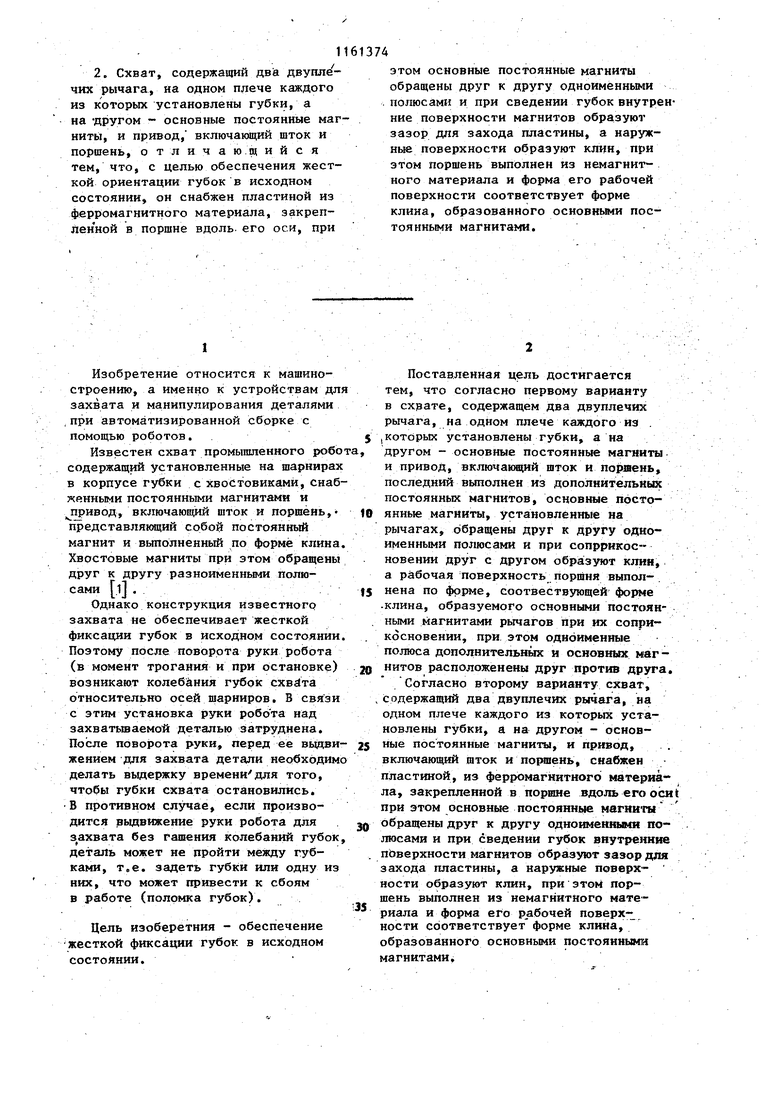
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1981 |
|
SU1007968A1 |
| Схват промышленного робота | 1983 |
|
SU1140945A1 |
| Захватное устройство | 1987 |
|
SU1445954A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват промышленного робота | 1980 |
|
SU906688A1 |
| Схват промышленного робота | 1984 |
|
SU1248796A2 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |

1. Схват, содержащий два двуплечих рычага, на одном плече каждого из которых установлены губки, а на другом - основные постоянные магниты, и привод, включающий шток и поршень, отличающийся тем, что, с целью обеспечения жесткости ориентации губок в исходном состоянии, поршень выполнен из дополнительных. постоянных магнитов, основные постоянные магниты, установленные на рычагах, обращены друг к другу одноименньми полюсами и при соприкоснове нии друг с другом образуют клин, а рабочая поверхность поршня по форме, соответствующей форме клина, образуемого основными постоянными магнитами рычагов при их соприкосновении, при этом одноименные полюса дополнительных и основных постоянных магнитов расположены друг против друга.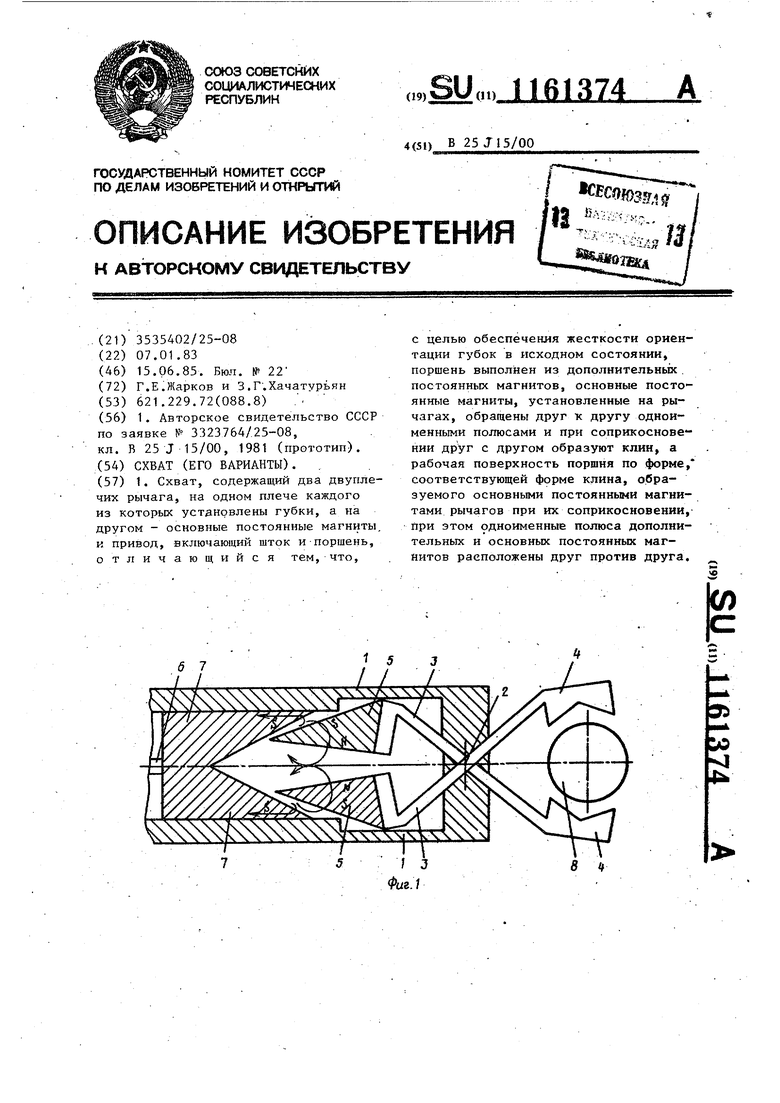
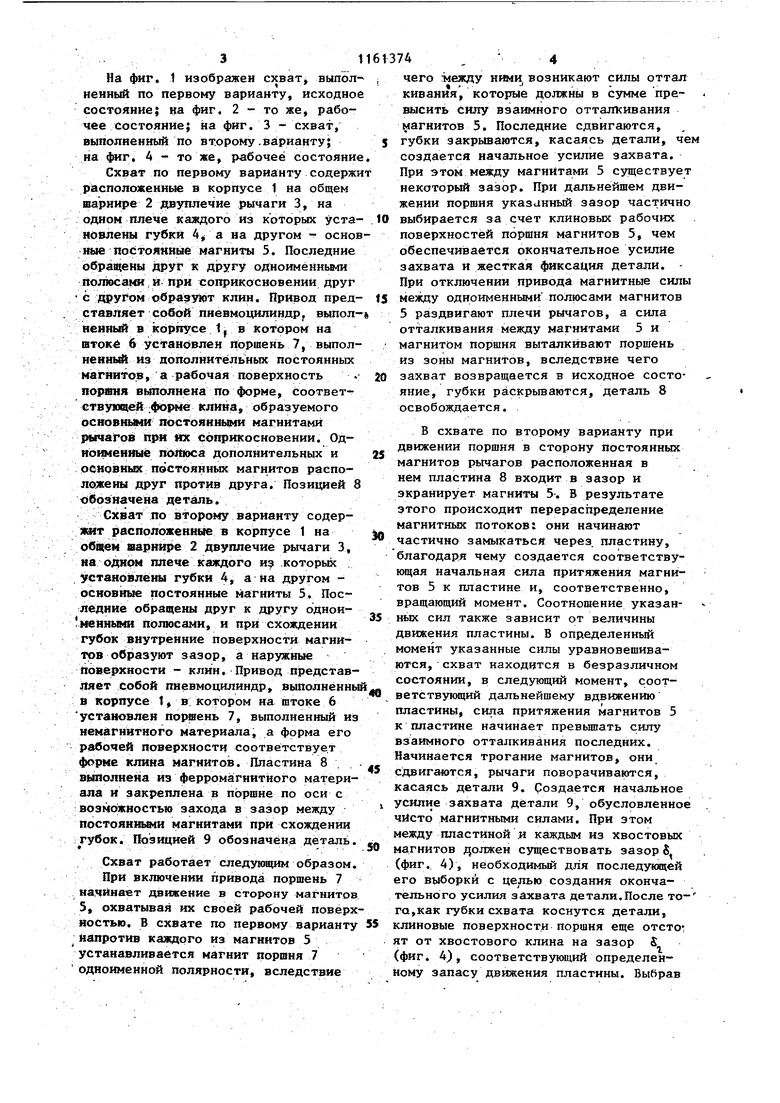
Изобретение относится к машиностроению, а именно к устройствам дл захвата и манипулирования деталями ,при автоматизированной сборке с помощью роботов. Известен схват промышленного робо содержащий установленные на шарнирах в корпусе губки с хвостовиками, снаб женными постоянными магнитами и привод, включающий шток и поршень,предетавлякяций собой постоянный магнит и выполненный по форме клина Хвостовые магниты при этом обращены друг к другу разноименными Полюсами l . Однако конструкция известного захвата не обеспечивает жесткой фиксации губок в исходном состоянии Поэтому после поворота руки робота (в момент трогания и при остановке) возникают колебания губок сквйта относительно осей шарниров. В связи с этим установка руки робота над захватьшаемой деталью затруднена. После поворота руки, перед ее вьщви жением для захвата детали необходим делать выдержку временидля того, чтобы губки схвата остановились. В противном случае, если производится вьщвижение руки робота для з ахвата без гашения колебаний губок деталь может не пройти между губками, т.е. задеть губки или одну из них, что может привести к сбоям в работе (поломка губок). Цель иэоберетния - обеспечение жесткой фиксации губок в исходном состоянии. Поставленная цель достигается тем, что согласно первому варианту в схвате, содержащем два двуплечих рычага, на одном плече каждого из (Которых установлены губки, а на другом - основные постоянные магниты. и привод, включающий шток и по|шень, последний выполнен из дополнительных постоянных магнитов, основные постоянные магниты, установленные на рычагах, обращены друг к другу одноименными полюсами и при сопррикооновении друг с другом обра:зуют кдшн, а рабочая поверхность порЩня выполнена по форме, соотвествующей форме -клина, образуемого основными постоявными магнитами рычагов йри их соприкосновении, при этом одноименные полюса дополнительньпс и основных магнитов расположенены друг против друга. Согласно второму варианту схват, содержащий два двуплечих рычага, на одном плече каждого из которых установлены губки, а на другом - основные постоянные магниты, и привод, включающий шток и по1яоень, снабжен пластиной, из ферромагнитного материала, закрепленной в поршне вдоль его оси t при этом основные постоянные магниШ обращены друг к другу одноименнь си полюсами и при сведении губок внутренние поверхности магнитов образуют зазор для захода пластины, а наружные поверхности образуют клин, при этом поршень выполнен из немагнитного материала и форма еГо рабочей поверхности соответствует форме клниа, образованного основными постоянными магнитами. 3 На фиг. 1 изображен схват, выпол ненный по первому варианту, исходно состояние; на фиг. 2 - то же, рабочее состояние; на фиг. 3 - охват, выполненный по второму.варианту; на фиг, 4 - то же, рабочее состояни Схват по первому варианту содерж р асположенные в корпусе 1 на общем шарнире 2 двуплечие рычаги 3, на одном плече к вдого из которых уста новлены губки 4 а на другом - осно ные постоянные магниты 5. Последние обращены друг к другу одноимёнными йолюса(О1,й при соприкосновений друг 6 другом )т клин. Привод пред ставляет собой пневмоцилиндр, выпол ненньА в корпусе 1, в котором на штоке 6 установлен Чоршень 7, выцол неннь из дополнительных постоянных магнитов, а рабочая поверхность поршня выполнена по форме, соответствующей -форме клина, образуемого основными постоянньб ш магнитами рычагов при их соприкосновении. Одноимейные nojtioca дополиительных и основное постоянных магнитов расположены друг против друга. Позицией обозначена деталь. Схдат по второму варианту содержит расположенные в корпусе 1 на общей шарнире 2 двуплечие рычаги 3, на одном плече каждого из которых : Устано 9ЛёнЫ губки 4, а На другом основные постоянные магниты 5. Последние обращены друг к другу одноииенными Полюсами, и при схождении губок внутренние поверхности магнитов образуют зазор, а наружные поверхности - клин. Привод представЯяет собой пневмоцилиндр. выполненны - , В корпусе 1 в котором на штоке 6 установлен поршень 7, выполненный из немагнитного материала, а форма его рабочей поверхности соответствует форме клина магнитов. Пластина 8 вьтолнейа из ферромагнитного материала и закреплена в поршне по оси с возможностью захода в зазор между постоянньши магнитами при схождении губок. Позицией 9 обозначена деталь Схват работает следующим образом При включении привод поршень 7 начинает движение в сторону магнитов 5, охватывая их своей рабочей поверх ностью. В схвате по первому варианту напротив каждого из магнитов 5 устанавливается магнит поршня 7 одноименной полярности, вследствие 74 чего между mtuK возникают силы оттал кивания , которые должны в сзгмме превысить силу взаимного отталкивания магнитов 5. Последние сдвигаются, губки закрываются, касаясь детали, чем создается начальное усилие захвата. При этом между магнитами 5 сзпцествует некоторый зазор. При дальнейшем движении поршня указанный зазор частично выбирается за счет клиновых рабочих поверхностей поршня магнитов 5, чем обеспечивается окончательное усилие захвата и жесткая фиксация детали. При отключении привода магнитные силы между одн оименными полюсами магнитов 5 раздвигают плечи рычагов, а сила отталкивания между магнитами 5 и магнитом поршня выталкивают поршень из зоны магнитов, вследствие чего захват возвращается в исходное состояние, губки раскрьшаются, деталь 8 освобождается. В схвате по второму варианту при движении поршня в сторону постоянных магнитов рычагов расположенная в нем пластина 8 входит в зазор и экранирует магниты 5. В результате этого происходит перераспределение магнитных потоков: они начинают частично зa я Iкaтьcя через, пластину, благодаря чему создается соответствующая начальная сила притяжения магнитов 5 к пластине и, соответственно, вращающий момент. Соотношение указанньк сил также зависит от величины движения пластины. В определенный момент указанные силы уравновешиваются, схват находится в безразличном «состоянии,в следующий момент, соответствукндии дальнейшему вдвижению пластины, сила притяжения магнитов 5 к пластине начинает превьшгать силу взаимного отталкивания последних. Начинается трогание магнитов, они сдвигаются, рычаги поворачиваются, касаясь детали 9. Создается начальное усилие захвата детали 9, обусловленное чисто магнитными силами. При этом между пластиной я каждым из хвостовых магнитов ;5олжен существовать зазор 8. (фиг. 4), необходимый для последующей его выборки с целью создания окончательного усилия захвата детали,После то- га,как губки схвата коснутся детали, клиновые поверхности поршня еще отстоят от хвостового клина на зазор S (фиг. 4), соответствующий определенному запасу движения пластины. Выйрав этот запас вдвижеыия, выбирается зазор 5 5 клиновые поверхности порш ня начинают давить на ма1 нитЫэ верти кальные составляющ1 е усилий при этом обеспечивают дожатие магнитов, части ную выборку зазора 5. и окончательно усилие захвата детали. При отключени привода поршень движется в обратном направлении, пластина выходит из магнитного зацеп.пениЯ; У агниты 5 раздвигаются, губки 4 раскр1 пяются, разжимая деталь 9. Далее процесс работы схвата повтор 1ется. Обеспечение зазора (S, осуществляется разностью фаз касания губок с деталью и магнитов 5 с пластиной. В случае опережения касания губок с деталью зазор 5 будет обеспечен. Для того. чтобы указанное опережение не зависело от размеров детали, на губках могут быть установлены CMenuf-ie зажимы под конкретную деталь. В общем случае поршень может быть установлен на пластине с возможностью перемещения относительно последней для целей регулировки зазора , Обеспечить опережение можно также установлением магнитов 5 с возможностью перемещения, например вра1цения относительно точки А (фиГ. 4), .Однако в этом случае может усложниться конструкция схвата. Пред.иагаемый схпат. Имеет устойчивое исходное положение смалой гюстоянной возврата и упрощенную конструкцию.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3323764/25-08, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
