(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1990 |
|
SU1785896A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| Захватное устройство | 1986 |
|
SU1318505A1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват | 1986 |
|
SU1313700A1 |
| Грузоподъемный электромагнит | 1986 |
|
SU1435525A1 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
ЗАХВАТ МАНИПУЛЯТОРА, содержащий губки, снабженные приводом их перемещения, отличающийся тем, что, с целью расщирения функциональных возможностей при захвате деталей как за внутреннюю, так и за наружную поверхность, он снабжен направляющим элементом, на котором установлены губки, а привод их перемещения выполнен в виде двух последовательно расположенных блоков, каждый пз которых содержит постоянный магнит и электрома1нит, установленные с чередованием, при этом крайние элементы блоков жестко связаны с направляющим элементом, а средние - с губками.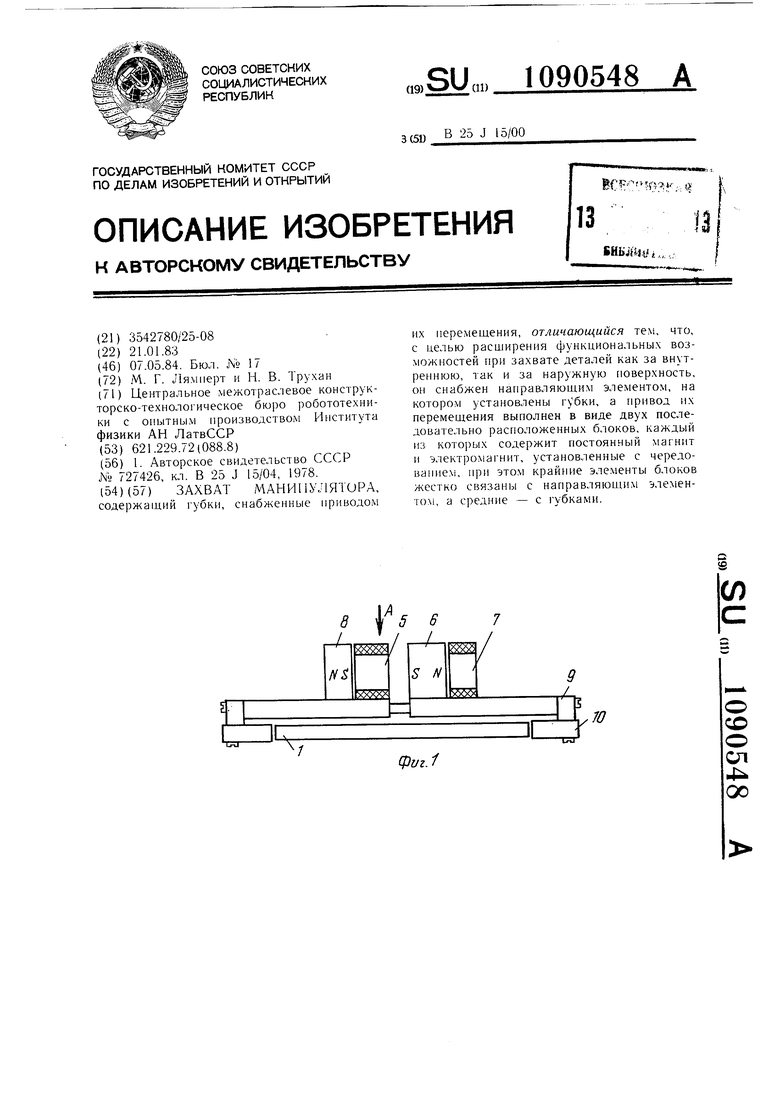
тгл7ff
У-3
СО
о
Фг/г.7
СП
4
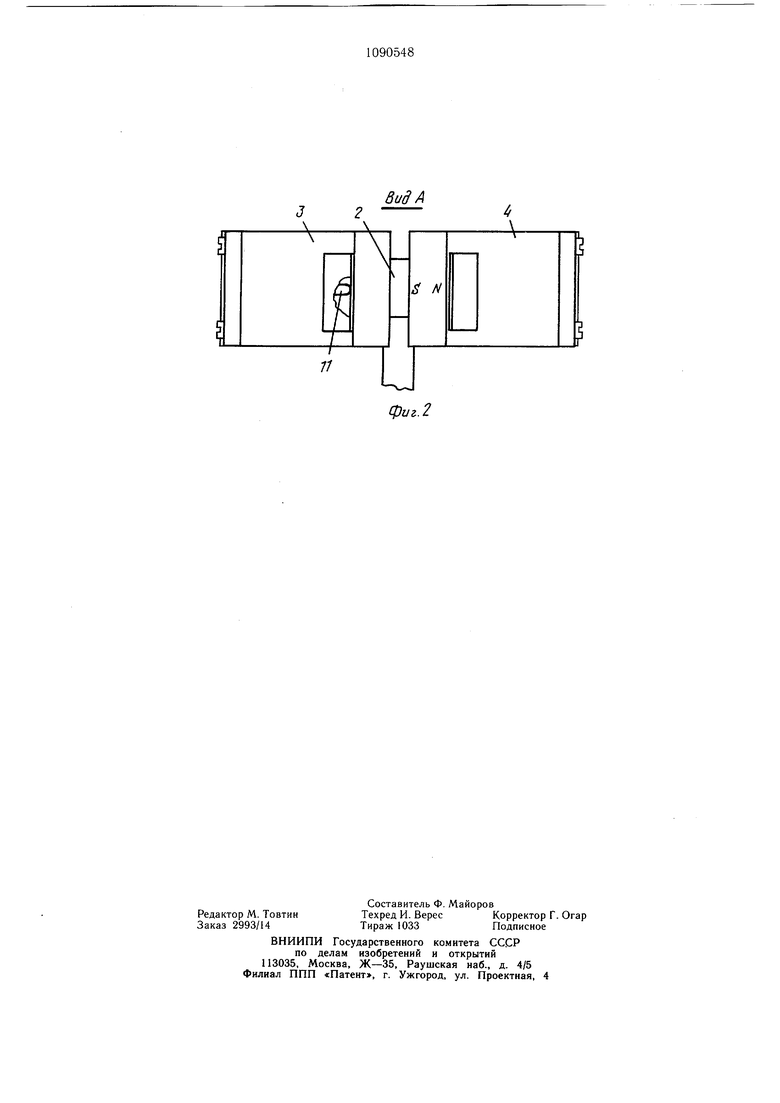
ОС Изобретение относится к аню.матизации производственных iipoij.eccoB с помошью манипуляторов и промышленных роботов и может найти применение в приборостроительной, радиоэлектронной и других отраслях промышленности для надежного захвата и транспортировки деталей. Известен захват манипулятора, содержащий привод, снабженный постоянным магнитом с кольцевой проточкой и катушкой индуктивности. Подвижный элемент захвата выполнен в виде имеющей форму кольца и несущей захватные губки мембраны, с одной стороны прикрепленной к корнусу, а с другой - к катушке индуктивности. Усилие зажима регулируется изменением подаваемого на катушку индуктивности напряжения. Устройство предназначено для захвата и манипулирования деталями типа пластин 11. Недостатком известного устройства является ограничепие функциональных возможностей, вызванное сложностями регулирования раскрытием схвата в достаточно широких пределах, что не позволяет захватывать крупные детали, а также невозможность захвата деталей как за внутреннюю, так и за наружную поверхность. Цель изобретения - расширение функциональных возможностей устройства при захвате как за внутреннюю, так и за наружную поверхность. Поставленная це.ть дости1ается тем, что захват манипулятора, содержащий губки, снабжепп1 1е приводом их перемещения, снабжен направляющи.м элементом, на котором установлены губки, а привод их перемещения выполнен в виде двух пос.тедовательно расположенных блоков, каждый из которых содержит постоянный магнит и электромагнит, установленные с чередованием, при этом крайние элементы блоков жестко связаны с направляющим элементо.м, а средние - с губками. На фиг. 1 изображен захват, общий вид; на фиг. 2 - вид А на фиг. 1. Схват для захвата плоских деталей 1 состоит из направляюш.его элемента 2, на котором установлены две подвижные платформы 3 и 4. На платформе 3 закреплен электромагнит 5, а на платформе 4 - постоянный магнит 6. Для фиксации платформ 3 и 4 в резвернутом состоянии и привода их перемспиения нан1)отив постоянного магнита б на платформе 4 предусмотрен электромагнит 7, а напротив электромагнита 5 установлен постоянный магнит 8, образующие блоки. С торцов платформ 3 и 4 на кронштейнах 9 прикреплены губки 10. Электромагнит 5 и постоянный магнит 6 могут перемещаться вместе с платформами 3 и 4, а электромагнит 7 и постоянный магнит 8 неподвижно крепятся к направляющему элементу 2 через соединительный элемент, для которого предусмотрен паз 11. Схват носле установки его на руку манипулятора работает следующим образом. В исходном ноложении платформы 3 и 4 разведены, по команде ЭЦПУ манипулятора в электромагниты 5 и 7 подается импульс такого направления, что на полюсах образуется магнитный полюс такого же знака, что и у постоянных магнитов 6 и 8 (в зоне контакта электромагнита 7 с постоянным магнитом б и зоне контакта электромагнита 5 и постоянным магнитом 8 соответственно). Полюса постоянных магнитов б и 8 сфазированы таким образом, чтобы между внутренними элементами пар электромагнит - магнит благодаря наличию противоположных полюсов возникали силы притяжения и они стремились сбли31 ться, т.е. при зажиме детали 1 притяжению платформ способствуют и электромагниты. При сближении платформ губки 10 зажимают деталь. В зажатом состоянии деталь может быть перенесена на позицию, |де для ее освобождения в электро.магниты 5 и 7 подается импульс противоположного направления, средние элементы пар отталкиваются кроме того, происходит притяжение в парах электромагнит 5 - постоянный магнит 8, электромагнит 7 - постоянный магнит 6 соответственно. Освобожденный от детали схват по команде возвращается для захвата очередной детали. Для за хвата деталей за внутреннюю поверхность требуется только изменение конструкции прижимных губок и изменение порядкаподачи импульсов на электромагниты, а именно - отталкивание средних элементов пар на этапе захвата и сближение - на этапе освобождения захвата от детали. Использование изобретения позволяет расширить функциональнве возможности захвата при захвате деталей как за внутреннюю, так и за наружную поверхность.
фиг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват | 1978 |
|
SU727426A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
