Изобретение относится к измерител ной технике и может быть использовано в системах автоматического контроля, управления и регулирования. По основному авт. св. 934282 известен датчик углового положения и скорости враадения вала, содержащий генератор импульсов, первьй и второй счетчики f формирователь опорных сигналов, фазовращатель, нуль-орган, пе вый и второй регистры, управляемый ключ,, формирователь задержанных импульсов и триггер, в котором выход генератора импульсов подключен непосредственно к первому счетчику и. ЧВрез ключ, управлякхдий вход которого соединен с выходом дополнительного триггера, к второму счетчику, при этбм вход нуль-органа через последовательно соединенные фазовращатель и формирователь опорных сигналов подключен к выходу старшего разряда первого счетчика, выходы всех разрядов которого соединены с входами первого регистра. Вход разрешения записи первого регистра, первый вход триггера и вход формирователя задержанных импульсов соединены с выходом нуль-органа. Первый, второй, и трети выходы формирователя задержанных импульсов соеди.нены соответственно с входом разрешения записи второго регистра, входом сброса второго счетчика и вторым входом триггера. Выходы разрядов второго счетчика соедине ны с информационными входами второго регистра Cl. Недостатком известного датчика яв ляется отсутствие возможности одновр менного измерения ускорения вращения вала, .что ограничивает функциональны возможности датчика .Цель изобретения - расширение функциональных возможностей датчика за счет измерения ускорения вращения вала. Поставленная цель достигается тем, что в датчик углового положения и скорости вращения вала дополнитель но введены цифровой измеритель сдвиг фаз, фазовый дискриминатор, интегратор и управляемый генератор, при этом первые входы цифрового измерите ля сдвига фаз и фазового дискриминатора соединены с выходом нуль-органа а их вторые входы соединены с выходом управляемого генератора, вход которого через интегратор подключен к выходу фазового дискриминатора, при этом опорный вход цифрового измерителя сдвига фаз соединен с ..выходом генератора импульсов. На чертеже изображена блок-схема предлагаемого датчика. Датчик содержит генератор 1,импул сов, первый счетчик 2, формирователь 3 опорных напряжений, фазовращатель 4, нуль-орган 5, первый регистр б, второй счетчик 7, управляемый- ключ 8, триггер 9, формирователь 10 задержанных импульсов, второй регистр 11, фазовый дискриминатор 12, интегратор 13, управляемый генератор 14, цифровой измеритель 15 сдвига .фаз. Датчик работает следующим образом. Импульсы с генератора 1 импульсов через первый счетчик 2- поступают .на формирователь 3 опорных напряжений., где вырабатываются.напряжения питания для фазовращателя 4, Нуль-орган 5 вырабатывает из выходного напряжения фазовращателя 4 прямоугольные импульсы, по переднему фронту которых производится запись текущего значения кода счетчика 2 в регистр б,а также устанавливается в О триггер 9, закрывающий управляемый ключ 8, Одновременно с этим запускается формирователь 10 задержанных импульсов, первый сигнсш которого на выходе 16.. используется для переноса информации из второго счетчика 7 во второй регистр 11, в котором записывается код, пропорциональный изменению прирс1щения периода импулЬсов на выходе фазовращателя по отношению к периоду опорного напряжения. Код в счетчике 7 формируется следующим образом. По сигналу, формируемому на выходе 17 формирователя 10 задержанных импульсов, в счетчик 7 заносится код, соответствующий числу импульсов генератора 1, прошедших .за время пере- записи кода в регистр 11, в момент, открытия управляемого ключа 8 при установке в 1 триггера 9 по сигналу на выходе 18 формирователя 10 задержанных импульсов, что. позволяет исключить влияние переходных процессов на измерение. При определении ускорения выходной сигнал нуль-органа 5 поступает на первый вход фазового дискриминатора 12 и на первый вход цифрового измерителя .15 сдвига-фаз, который определяет величину относительного, смещения фронтов импульсов, поступающих на его входы А и В. В установившемся режиме частоты управляемого генератора 14 поддерживается равной частоте выходного сигнала фазовращателя 4, напряжение на интеграторе постоянно. Фазовое рассогласование между импульсами нуль-органа 5 и управляемого генератора 14 отсутствует. Цифровой измеритель разности фаз формирует нулевой код. При изменении скорости вращения вала изменяются и фазовые соотношения сигналов на входах А и В цифрового измерителя 15 разности фаз. Так как сигнал с выхода фазового дискриминатора поступает на вход управляемого генера.тора через интегрирующую цепь, то из-за задержки во времени
3 1008659.
подстройки гёнератора на новое значе- сдвига фаз формирует нулевой код ние частоты цифровой измеритель сдвига ускорения вращения.
фаз будет формировать код ускорения . Величина постоянной интегрирования вращения тем больший, чем более рез- выбирается исходя как из диапазона иэмег кие изменения претерпевала скорость рения ускорения вращения вал а, так и из вращения вала. При достижении нового 5 требований к точности измерения, установившегося значения скорости вра- Использование широкофункциональнощения среднее напряжение на выходе го датчика позволит существенно улучфазоврго дискриминатора 12 становит- шить качество регулирования систем ся равным нулю, фазовое рассогласо- . автоматического управления и регули между импульсами на входах А Ю рования и в ряде случаев повысить их и В устраняется, цифровой измеритель быстродействие.

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик углового положения,скорости и ускорения вращения вала | 1981 |
|
SU994990A2 |
| Датчик углового положения,скорости и ускорения вращения вала | 1983 |
|
SU1101740A1 |
| Датчик углового положения, скорости и ускорения вращения вала | 1982 |
|
SU1107055A2 |
| Цифровой тахометр | 1989 |
|
SU1615615A1 |
| Датчик углового положения,скорости и ускорения вращения вала | 1983 |
|
SU1213417A2 |
| Датчик углового положения и скорости вращения вала | 1988 |
|
SU1615619A2 |
| Датчик углового положения и скорости вращения вала | 1989 |
|
SU1695233A2 |
| Устройство для коррекции показаний датчика положения нажимных устройств прокатной клети | 1986 |
|
SU1338914A1 |
| Преобразователь код-угол | 1980 |
|
SU858053A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1121691A1 |
ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ И СКОРОСТИ ВРАЩЕНИЯ ВАЛА по авт.св. №934382, отличающийся тем, что, с целью расширения его фукнциональных возможностей за счет измерения ускорения вращения вала, в него дополнительно введены цифровой измеритель сдвига фаз, фазовый дискриминатор, интегратор и управля емьй генератор, при этом первые входы цифрового измерителя сдвига фаз и фазового дискриминатора соединены с выходом нуль-органа, а вторые их входы соединены с выходом управляемого генератора, вход которого через интегратор подключен к выходу фазового дискриминатора, при этом опорный вход цифрового измерителя .сдвига фаз соединен с выходом генератора импульсов. О) с as СП 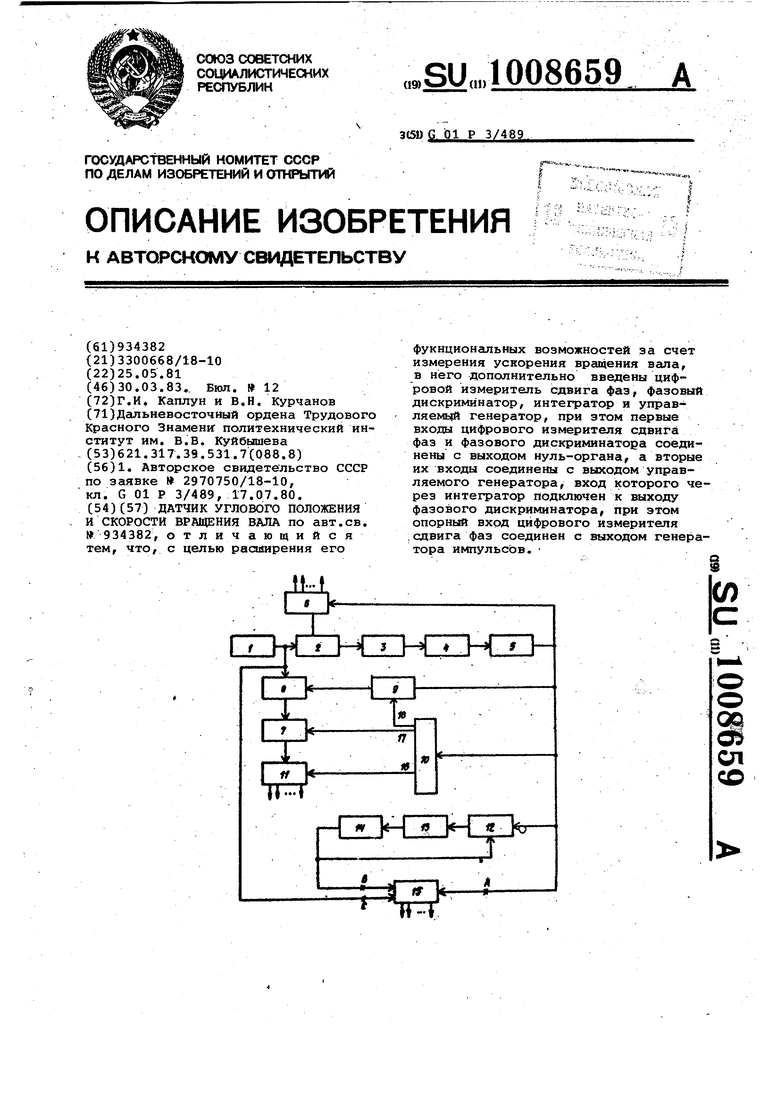
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке 2970750/18-10, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
