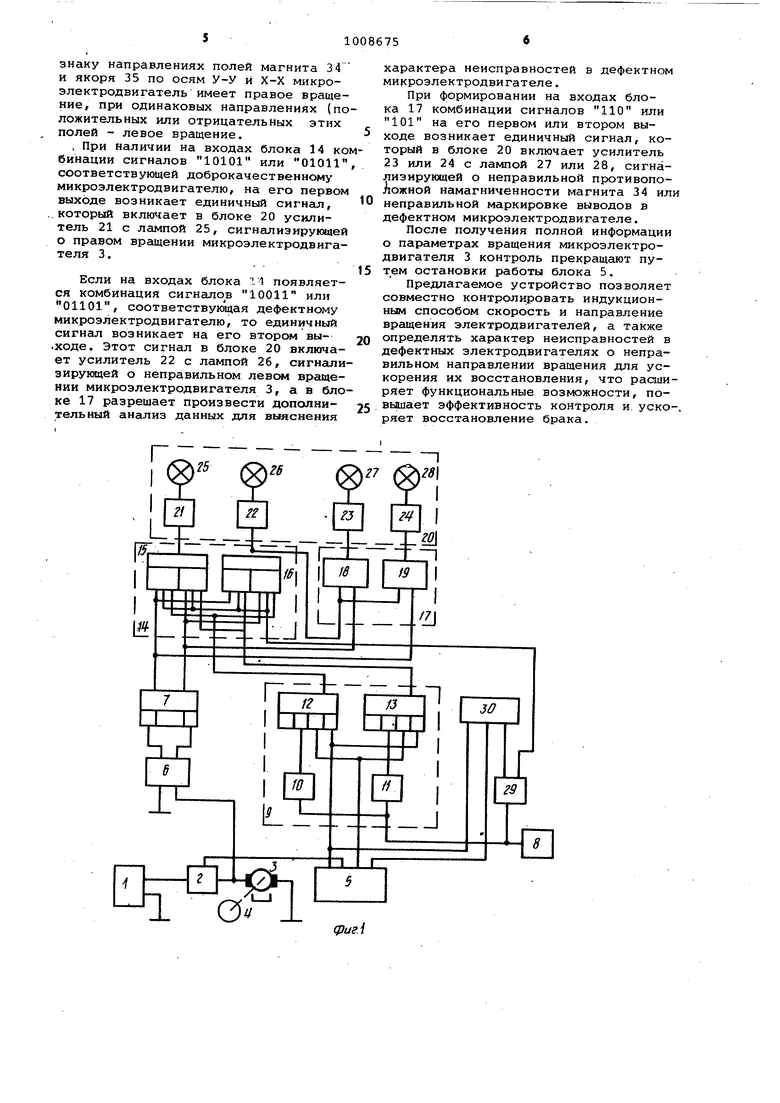
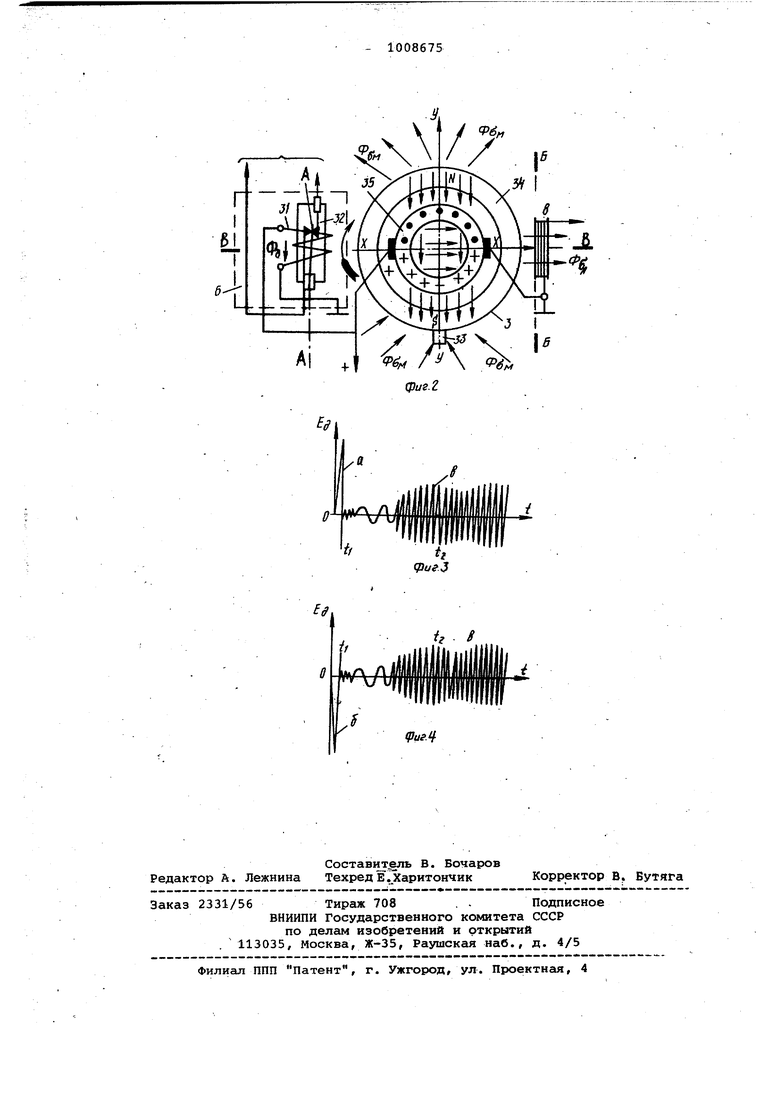
Изобретение относится к электроизмерительной технике и может быть использовано для контроля скорости направления вращения электродвигателей постоянного тока. Известно устройство для определе ния скорости и направления вращения вала, содержащее частотный генераторный датчик, ротор которого закреплен на контролируемом валу, блок преобразования частоты и среднее на пряжение и два пороговых устройства подключенные к обмоткам двух зубчат статоров датчика, блок регистрации знака сдвига фаз выходных напряжений датчика 13. Недостаток устройства - невозмож ность контроля электрических машин в закрытых электропроводах. Наиболее близким к предлагаемому по технической сущности является устройство для измерения скорости вращения электродвигателей постоянного тока с постоянными магнитами, содержгицее индукционный датчик, установленный Над поверхностью корпус электродвигателя в зоне одного из е полюсов, преобразователь сигналов и индикатор скорости вращения электро двигателя 2 . Недостаток этого устройства закл чается в невозможности одновременного контроля скорости и направлени вращения электродвигателя. Цель изобретения - расширение фу циональных возможностей устройства путем совмещения контроля скорости и наЛразления вращения электродвига теля. Поставленная цель достигается те что в устройство, содержащее источник постоянного тока, коммутационный элемент, через который электродвигатель подключен к источнику по.стоянного тока, программный блок, первый выход которого соединен с управляющим входом коммутационного элемента, индукционный датчик, установленный над поверхностью корпус электродвигателя, блок преобразователя сигналов, вход которого соединен с индукцио.ным датчиком, блок измерителя скорости, входы которого соединены соответственно с первым выходом блока преобразователя сигналов, с вторым и третьим выходами программного блока, введены магнит ный датчик для определения направл ния основного поля, элемент памяти блок определения направления поля якоря, блок обработки информации, блок определения неисправностей, блок индикации, причем входы блока обработки инф0 миации соединены соответственно с выходами элемента п мяти, блока определениянаправлени шоля якоря и с вторым выходом блок (преобразователя сигналов, входы бл ка определения неисправностей соединены с выходами элемента памяти и с вторым выходом блока обработки информации, входы магнитного датчика соединены с выходом коммутационного элемента и нулевой шиной источника постоянного тока, а выходы магнитного датчика соединены с входами элемента памяти, входы блока определения направления поля якоря соединены соответственно с индукционным датчиком, с первым, вторым и четвертым выходами программного блока. На фиг. 1 приведена блок-схема предлагаемого устройства; на фиг.2 конструкция и схема расположения датчиков относительно программного электродвигателя, на фиг. 3 и 4 осциллограммы сигналов в индукционном датчике при правом и левом вращениях микроэлектродвигателя. Устройство содержит источник 1 постоянного тока, коммутационный элемент 2, проверяемый микроэлектродвигатель 3 с нагрузкой 4, программный блок 5, магнитный датчик 6 для определения направления основного поля элемента памяти его сигналов, выполненного на триггере 7, индукционный датчик 8, блок 9 определения направления поля якоря, включающий селекторы 10 и 11 положительного и отрицательного импульсов и элементы памяти на триггерах 12 и 13, блок 14 обработки информации на элементах 2 И-ИЛИ 15 и 16,блок 17 определения неисправностей на элементах И 18 и 19,блок 20 индикации на выходных усилителях 21-24, нагруженных лампами сигнализации 25 (Правое вращение), 26 (Левое вращение), 27 (Неправильное намагничивание) и 28 (Неправильная маркировка выводов), блок 29 преобразователя сигналов и блок измерителя скорости. В качестве магнитного датчика б применено герконовое реле с обмоткой 31 и переключающимся контактом геркона 32, расположенное вблизи от корпуса микроэлектродвигателя 3. Индукционный датчик 8 выполнен в виде прямоугольной многовитковой рамки и установлен вплотную к корпусу микроэлектродвигателя 3. Продольная ось А-А геркона в датчике 6 и плоскость Б-Б расположения датчика 8 перпендикулярны осевой плоскости В-В, которая проходит через геометрическую нейтраль микроэлектродвигателя 3 и является одновременно плоскостью симмет рии датчиков 6 и 8. Средний вывод переключающегося контакта геркона 32 подсоединен к нулевой шине источника тока, его нормально закрытый и нормально открытый контакты - соответственно к первому и второму входам триггера 7, а обмотка 31 - к выходу коммутационного элемента 2 и нулевой шине источника 1 тока. Устройство работает следующим об разом. Перед контролем проверяемый микр электродвигатель 3 устанавливают на рабочую позицию (не показана , фикс руют .его положение .по выводной втул ке 33, позволяющей ориентировать Nполюса кольцевого магнита 34 по вер тикали, и подключают его выводные концы согласно маркировке в схему у равления . Коммутацию цепей управления осуществляют согласно заданной программе при помощи блока 5. В устройстве сочетаются индуктив ные способы косвенного контроля направления и скорости вращения микро электродвигателя, которые позволяют выделить необходимую информацию из сигналов, характеризующих параметры его внешнего электромагнитного поля рассеяния. Косвенный контроль напра ления вращения осуществляют во время пуска микроэлектродвигателя путем оп ределения направлений его основного поля и поля якоря и последующей логической обработки полученных данных а косвенный контроль скорости - вус тановившемся режиме работы микроэлек тродвигателя путем выделения из слож ного сигнала, характеризующего переменную составляющую его поля рассеяния, зубцовой гармоники и измерения ее частоты, пропорциональной действительной скорости .вращения микроэлектродвигателя, где 2 - число зубцов якоря/ п - частота вращения микроэлектродвигателя (об/мин). I Устройство включают в работу путем запуска программного блока 5. При этом на его втором выходе появляется кратковременный сигнал, который срабатывает информацию в блоках 9 и 30 и устанавливает их в исходное положение. После этого на пер вом выходе блока 5 возникает действу ющий до конца программы управляющий сигнал, включающий коммутационный элемент 2, через который обмотка якоря 35 микроэлектродвигателя 3 и обмотка 31 датчика б запитываются постоянным напряжением определенной полярности от источника 1 тока. Одновременно на его четвертом выходе появляется управляющий сигнал длительностью 50-100 мс, разрешающий запись информации в триггеры 12 и 13 блока 9. После выдачи питания вокруг микроэлектродвигателя 3 формируется внешнее электромагнитное поле, образованное продольными и поперечными магнитными потоками рассеяния кольцевого магнита 34 и якоря Zn 35. Направления п.отоков Ф 59 измеряемых датчиками б и 8, совпадают соответственно с направлениями основного ПОЛЯ и поля якоря внутри микроэлектродвигателя 3. В датчике 6 заданный по направлению магнитный поток Ф. обмотки 31 суммируется или вычитается с магнитным потоком При суммировании этих потоков замыкается нормально открытый контакт геркона 32, а при их вычитании его нормально замкнутый контакт остается в исходном положении. В соответствии с этим к нулевой шине подключается первый или второй вход триггера 7 и на его выходах возникает комбинация сигналов 10 или 01, свидетельст-вующая об отрицательном или положительном направлении основного поля по оси У-У. В датчике 8 в начальный интервал времени (0-t-,) индуцируется положительный а или отрицательный 6 импульс (фиг. 3 и 4) указывающий на появление в зоне геометрической нейтрали микроэлектродвигателя 3 магнитных потоков рассеяния от поля якоря 35 положительного или отрицательного направления,по оси ХтХ. При этом характер начального импульса, снимаемого с датчика 8, анализируют в блоке 9, где его селектируют по амплитуде и полярности в . .селекторе 10 или 11 и запоминают в триггере 12 или 13, на выходе которого устанавливается единичный сигнал. Появление на выходах блока 9 комбинации сигналов 10 или 01 свидетельствует о положительном или отрицате.льном направлении поля якоря 35 по оси Х-Х. В течение интервала времени скорость микроэлектродвигателя 3 нарастает до номинального значения, и он начинает работать в установившемся режиме. В датчике 8 устанавливаются периодические сигналы В, несущие информацию о -скорости вращения микроэлектродвигателя 3 (фиг. 3 и 4). В блоке 29 их селектируют и преобразовывают в сигналы, удобные для дальнейшей обработки. Через 1-1,5 с после включения блока 5 на его третьем выходе появляется .управляющий .сигнал определенной длительности, по которому в блоке 30 производится подсчет поступающих с первого выхода блока 2f9 импульсов, частота которых определяет скорость вращения микроэлектродвигателя 3. Одновременно для определения направления его вращения в блоке 14 анализируют данные сигналов, поступающих с выходов триггера 7, блока 9 и с второго выхода блока 29. На основании закона взаимодействия тока в проводнике и магнитного поля известно, что при неодинаковых по знаку направлениях полей магнита 34 и якоря 35 по осям У-У и Х-Х микроэлектродвигатель имеет правое вращение, при одинаковых направлениях (по ложительных или отрицательных этих полей - левое вращение. . При наличии на входах блока 14 ко бинации сигналов 10101 или 01011 соответствующей доброкачественному микроэлектродвигателю, на его первом выходе возникает единичный сигнал, который включает в блоке 20 усилитель 21 с лампой 25, сигнализирующей о правом вращении микроэлектродвигателя 3. Если на входах блока 1.1 появляется комбинация сигнало в 10011 или 01101, соответствующая дефектному микроэлектродвигателю, то единичный сигнал возникает на его втором выходе. Этот сигнал в блоке 20 включает усилитель 22 с лампой 26, сигнали зирующей о неправильном левом вращении микроэлектродвигателя 3, а в бло ке 17 разрешает произвести дополнительный анализ данных для выяснения характера неисправностей в дефектном микроэлектродвигателе. При формировании на входах блока 17 комбинации сигналов 110 или 101 на его первом или втором выходе возникает единичный сигнал, который в блоке 20 включает усилитель 23 или 24 с лампой 27 или 28, сигнализирующей о неправильной противопоАожной намагниченности магнита 34 или неправильной маркировке выводов в дефектном микроэлектродвигателе. После получения полной информации о параметрах вращения микроэлектродвигателя 3 контроль прекращают путем остановки работы блока 5. Предлагаемое устройство позволяет совместно контролировать индукционным способом скорость и направление вреицения электродвигателей, а также определять характер неисправностей в дефектных электродвигателях о неправильном направлении вращения для ускорения их восстановления, что расширяет функциональные возможности, повышает эффективность контроля и. уско-. ряет восстановление брака.
Г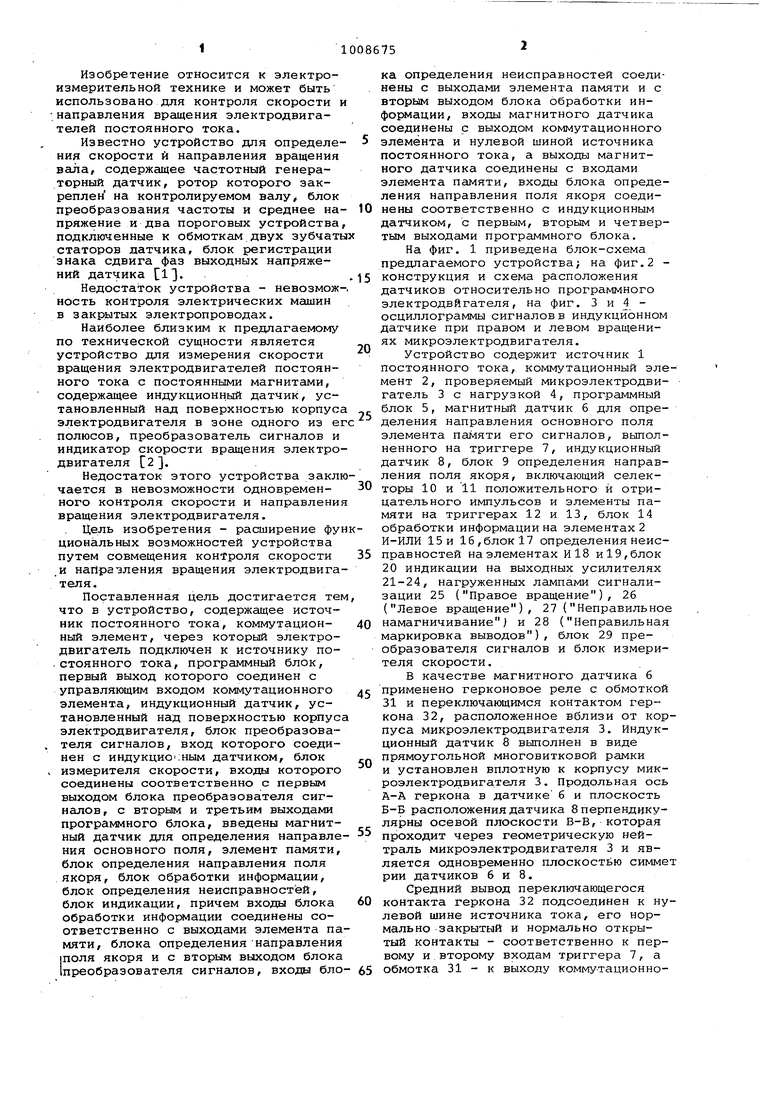

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля обмотки якоря микроэлектродвигателя | 1981 |
|
SU970284A1 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2526500C1 |
| Сканер активных датчиков антиблокировочной системы автомобиля | 2023 |
|
RU2799955C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФУНКЦИОНИРОВАНИЯ КОММУТАЦИОННОЙ ЭЛЕКТРОАППАРАТУРЫ | 1973 |
|
SU393700A1 |
| Вентильный электродвигатель | 1984 |
|
SU1325632A1 |
| Электропривод постоянного тока | 1986 |
|
SU1339855A1 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ИСПРАВНОСТИ ОБМОТКИ ЭЛЕКТРОМАГНИТНОГО МЕХАНИЗМА, ЦЕЛОСТНОСТИ ЦЕПЕЙ УПРАВЛЕНИЯ ТАКОЙ ОБМОТКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2020 |
|
RU2759588C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2016 |
|
RU2646934C1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Индукционный измеритель положения вращающегося вала | 2019 |
|
RU2704672C1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПА РАМЕТРОВ ВРАЩЕНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН ПОСТОЯННОГО ТОКА, содержащее источник постоянного тока, коммутационный элемент, через который электродвигатель подключен к источнику постоянного тока, программный блок, первый выход которого соединен суправляющим входом коммутационного элемента, индукционный датчик, установленный над поверхностью корпуса электродвигателя, блок преобразователя сигналов, вход которого соединен с индукционным датчиком, блок измерителя скорости, входы которого соединены соответственно с перэ|дм выходом блока преобразователя сигналов с вторым и третьим выходами программного блока, отличающееся тем, что, с целью расширения функдиональных возможностей путем совмещения контроля скорости и направления вращения электродвигателя, в него введены магнитный датчик для определения направления основного поля, элемент памяти, блок определения направления поля якоря, блок обработки информации, б/йзк определения неисправностей, блок индикации, причем входы блока обработки информации соединены соответственно с выходами элемента памяти, блока определения направления поля, якоря и с вторым выходом блока преобразователя сигналов, входы блока определения неисправное- , тей соединены с выходами элемента памяти и с вторым выходом блока обсл работки информации, входы магнитного датчика соединены с выходом коммутационного элемента.и нулевой шиной источника постоянного тока, а выходы магнитного датчика соединены с входами элемента памяти, входы блока определения направления поля якоря соединены соответственно с индуОтивнь1М .датчикомг с первым, вторым и четвертым выходами программного блооо да ка. СП
| Устройство для определения скорости и направления вращения вала | 1973 |
|
SU470742A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4138642, кл.С 01 R 31/02, 1979 (прототип). | |||
