Изобретение относится к электроизмерительной технике и может быть использовано для обнаружения дефектов в обмотках якорей микроэлектродвигателя постоянного и переменного тока при их производстве.
Известно Устройство для комплексного обнаружения основних: обмоточных дефектов в якоре электрической машины, содержащее П-образный индукторный датчик, подключенный к генератору переменного тока с частотой напряжения, обеспечивающей резонанс в обмотке якоря, и П-образный приемный датчик для измерения поля вра1р дающегося якоря, соединенный с индикатором, которые расположены над противоположныг-ш лобовыми частями обмотки якоря l.
Однако с помощью этого устройства нельзя уточнить вид дефектов в обмотке бракованного якоря, что необходимо для статистического анализа техпроцессов, точного определения причин брака и на основе этого принятия мер к его устранению. Кроме того, при работе с устройством необходимо активное участие контролеров, выполняющих ручные работы по
загрузке и выгрузке якорей и их разбраковки.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство для контроля обмотки якоря микродвигателя, содержащее приводной механизм проверяемого якоря, основные Ш-образные индукторный и приемный
10 датчики, размещенные в параллельных плоскостях на расстоянии друг от друга в пределах длины пакета проверяемого якоря, П-образный.индукторный и приемный датчики, установлен15ные в одной плоскости на расстоянии друг от друга, равном длине пакета проверяемого якоря, генератор переменного тока повышенной частоты, соединенный с П-образным индуктор20ным датчиком, три блока выделения сигналов, включающих входные усилители, а1«111литудные селекторы и триггеры, блок управления, первый вход которого соединен с установленными 25 входами триггеров, второй выход с управляюЕдими входами генератора и триггеров, общую панель для крепления датчиков 2 .
Однако данное устройство имеет
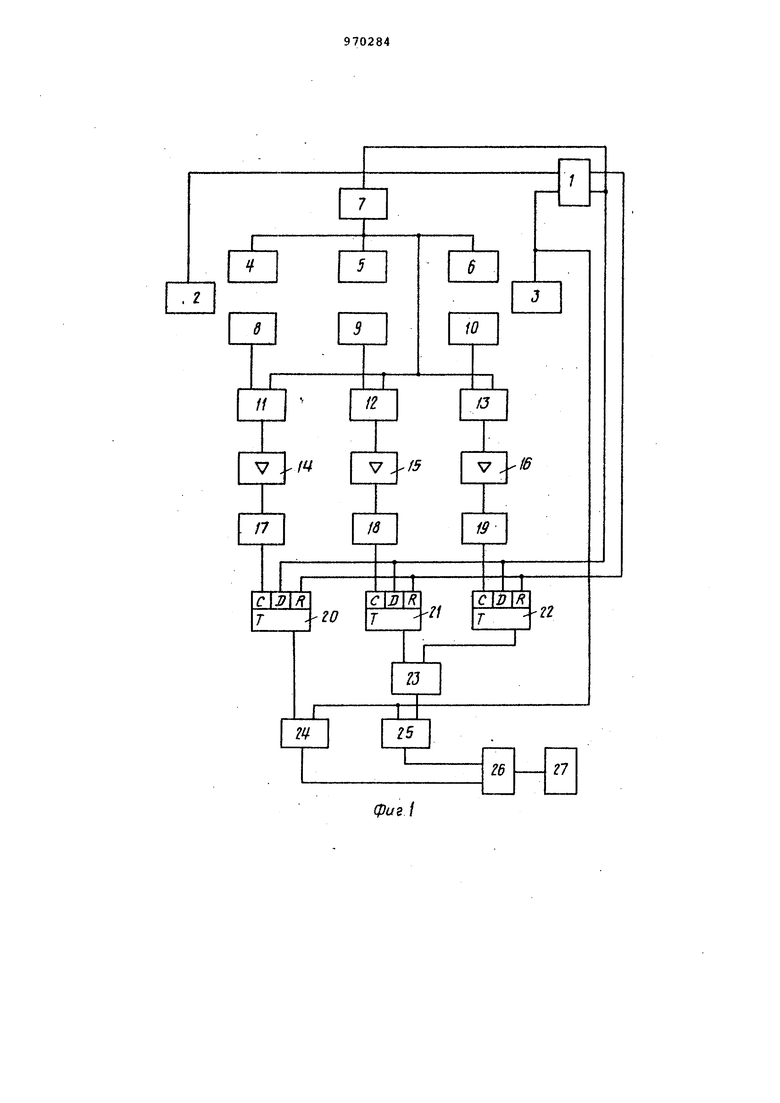
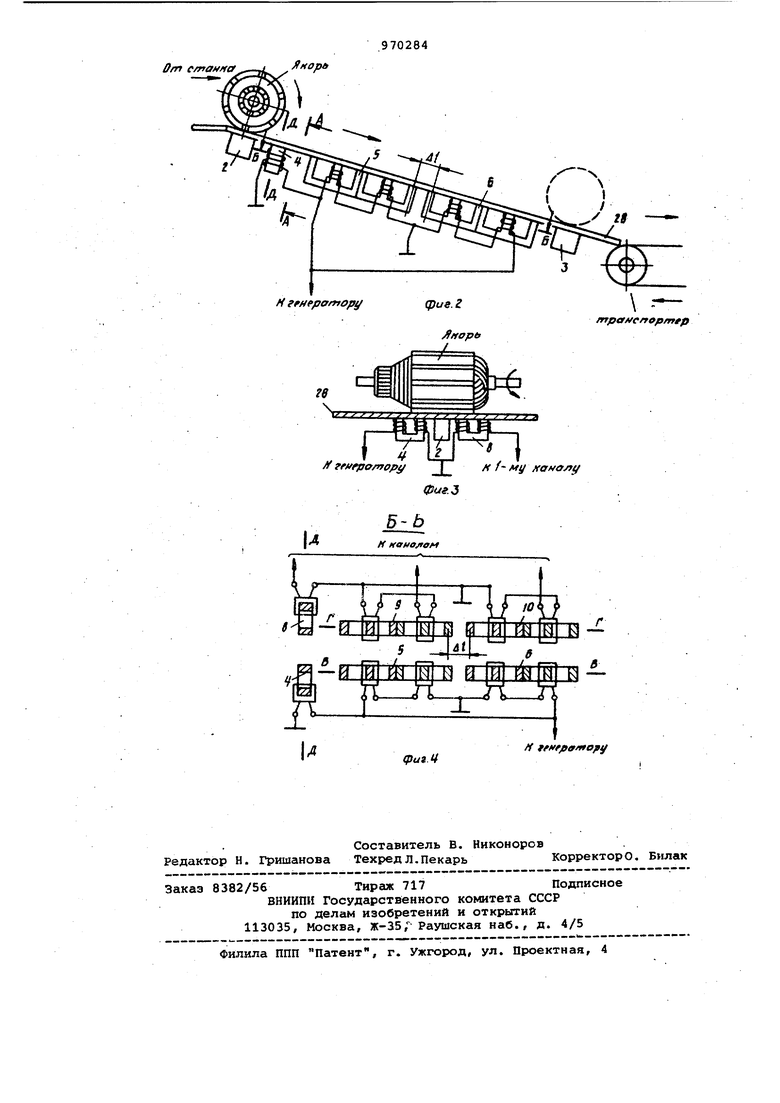
30 ограниченные возможности, поскольку не определяет обрывы проводников в обмотке якоря. Кроме того, применение этого устройства в составе автоматизированной технологической ли нии по изготовлению якорей, в условиях, их непрерывного потока и пер мещения при пооперационном изготовлении, связано с необходимостью вве дения ручного труда и разрыва техно логического цикла для обеспечения контроля и разбраковки якорей, что усложняет технологию, повьшает затр .ты времени на контрольные операции и снижает производительность линии. Цель изобретения - повышение точ ности разбраковки якорей по виду де фектрв в процессе изготовления. Поставленная цель достигается. ,тем, что в устройство введены допол нительные Ш-образные индукторные и приемные датчики, два датчика контроля положения проверяемого якоря, три компенсатора помех, схема сборки, две схемы совпадения, блок формирования команд и подключенный к нему исполнительный б.лок для удаления и разбраковки дефектных якорей. Причем основные и дополнительные Ш-образные датчики объединены в две группы последовательно соединенных индукторных датчиков, которые подключены к генератору переменного то ка, и в две группы последовательно соединенных приемных датчиков, кото рые вместе с П-образными индукторным и приемным датчиками закреплены перпендикулярно к общей панели, уст новленной под углом относительно го ризонтальной плоскости, и размещены на панели последовательно по ходу перемещения проверяемого якоря так, .что плоскость расположения П-образных датчиков перпендикулярна плоскостям расположения Ш-образных датчиков, а датчики для контроля положения проверяемого якоря установлен на панели соответственно перед П-об разными датчиками и после Ш-образных датчиков, причем выходы П-образного приемного датчика и двух групп Ш-образных приемных датчиков подключены к основным входам соответствующих компенсаторов помех, вспомогательные входы которых соеди нены с выходом генератора, их выходы - с входами соответствующих блоков выделения сигналов, выходы двух из которых подключены через схему сборки к первому входу второй схема совпадения, первый вход блока уп равления соединен с одним из датчиков контроля положения проверяемого якоря, второй его вход - с другим датчиком контроля положения проверяе мого якоря и с вторыми входами схем совпадения, выходы которых подключе ны к соответствующим входам блока формирования команд для исполнительного блока. В каждой из групп Ш-образные датчики установлены линейно в одной плоскости вплотную друг к другу, образуя единую электромагнитную систему, причем обмотки индукторных датчиков соединены последовательносогласно, обмотки приемных датчиков - последовательно-встречно, а первые группы индукторных и приемных датчиков смещены по ходу перемещения проверяемого якоря относительно их вторых групп на половину расстояния между зубцами проверяемого якоря. На фиг.1 изображена структурная схема устройства; на фиг.2 - конструкция и расположение датчиков в варианте устройства для контроля якорей двухполюсных микроэлектродвигателей ; на фиг.3 - сечение А-А на ; на фиг. 4 - сечение Б-Б на фиг.2. Устройство содержит блок 1 управления, начальный 2 и конечный 3 датчики контроля положения якоря, П-образный индукторный датчик 4 и две группы Ш-образных и индукторных датчиков 5 и 6, подключенные к выходу генератора 7 переменного тока повышенной частоты, П-образный приемный датчик 8 и две группы Ш-образнык приемных датчиков 9 и 10, три селективных канала, которые включают компенсаторы 11 - 13 помех и три блока вьщеления сигналов, состоящих из входных усилителей 14 - 16. амплитудных селекторов 17 - 19 и триггеров 20 - 22, схемы сборки 23, две схемы 24 и 25 совпадения, блок 26 формирования команд и подключенное к его выходу исполнительное устройство 27 для удаления и разбраковки дефектных якорей. Первый вход блока 1 управления соединен с начальным датчиком 2, второй вход - с конечным датчиком 3 и с вторыми входами схем 24 и 25 совпадения, выходы KOTopfciDi подкдаочены к первому и второму входам блока 26 формирования команд. Первый выход блока 1 соединен с установочными входами триггеров 20 - 22, в-торой выход - с управляющими входами генератора 7 и триггеров 20 и 22„ Выходы приемного датчика 8 и двух групп приемных датчиков 3 и 10 подключены соответственно к основным входа 5 крмпенсаторов 11-13 помех вспомогательные входы которых соединены с выходом генератора 7, выходы - с входами усилителей 14 - 15. Информационные входы триггеров 20 - 22 соединены через селекторы 17 - 19 с выходами усялителей 14 - It. а выходы триггера 20 и триггеров 21 и 22 - соответственно с первым входом схемы 24 совпадения и через схему 23 сборки с первым входом схемы 25 совпадения.
Конструктивно датчики предлагаемого устройства установлены на общей панели 28, являющейся частью наклонного желоба (не показан ), над или под которой скатываются по направляющим изготовленные якори, например от автоматического намоточного станка на транспортер, для дальнейшего их перемещения по автоматической технологической линии.
В устройстве для контроля якорей двухполюсных микроэлектродвигателей фиг.2) датчики 4 и 8, группы датчиков 5 и 9, б и 10 закреплены перпендикулярно к панели 28, установленной под углом 10-20° относительно горизонтальной плоскости, и размещены на ней последовательно по ходу перемещения якоря. Датчик 2 установлен на панели 28 перед датчиками 4 и 8, а датчик 3 - после группы датчиков б и 10.
Каждая из групп датчиков 5 или б и 9, или 10 включает два Ш-образных датчика, охватывающих при движении якоря более половины его пазов, которые установлены в одной плоскос ти линейно вплотную друг к другу, образуя единую электромагнитную систему. В Ш-образных датчикс1Х расстояние между центральным стержнем с обмоткой и его крайними стержнями соответствует расстоянию между зубцами якоря.
Группы индукторных 5 и 6 и приемных 9 и 10 датчиков размещены в параллельных плоскостях В-В и Г-Г, расстояние между которыми установлено в пределах длины пакета якоря, а индукторный 4 и приемный 8 датчики, расстояние между осями которых равно длине пакета якоря, - в плоскости Д-Д, перпендикулярной плоскостям В-В и Г-Г. I
Для исключения пропуска бракованных якорей, возможного при попадании их пазов на полюса Ш-образных датчиков, группы датчиков б и 10 смещены относительно групп ;;атчиков и 9 на половину расстояния между зуцами якоря.
Для снижения уровня помех от полей рассеяния групп индукторных датчиков 5 и б, обмотки в которых соединены последовательно-согласно, в группах 9 и 10 обмотки приемных датчиков соединены последовательно-, встречно.
При движении над панелью 28 изготовленный якорь, вращаясь, последовательно проходит через три зоны контроля: над индукторным и приемным датчиками 4 к 8, нгщ группами индукторных и приемных датчиков 5
и 9, б н 10 и через зону удаления бракованных якорей.
В первой зоне контроля в обмотке проверяемого якоря определяют обрывы проводников, а в остальных зонах контроля - наличие различных замыканий .
При появлении якоря над начальным датчиком 2 на его выходе возникает импульсный сигнал, который по первому входу запускает блок 1 управления. При зтом на установочные входы триггеров 20 - 22 с первого выхода блока 1 управления поступает импульсный сигнал, который устанавливает их в исходное положение. На выходе триггера 20 возникает сигнал 1, на выходах триггеров 21 и 22 - сигналы О. Одновременно на втором выходе блока 1 управления появляется управляющий сигнал, который включает генератор 7 переменного тока и дает разрешение на прием информации триггера 20 - 22. На обмотки индукторного датчика 4 и групп индукторных датчиков 5 и б поступает переменное напряжение повышенной частоты от генератора 7.
При перемещении доброкачественного якоря в первой зоне контроля электромагнитным полем индукторного
0 датчика 4 воздействуют на одну из лобовых частей его обмотки и возбуждают в ее секциях ряд синфазных ЭДС, создающих в замкнутом контуре секций якоря ток и, следовательно, собствен5ное поле. В обмотке бракованного якоря с обрывом ток в разомкнутом контуре его секций и поле отсутствуют.
Одновременно приемным датчиком 8
0 измеряют над другой лобовой частью обмотки доброкачественного якоря не только его собственное поле, но и, несмотря на экранирование, поле рассеяния близко расположенного ин5дукторного датчика 4. Причем сигналы помех в нем от индукторного датчика 4 соизмеримы с полезными сигналами, индуцированными собственным полем якоря.
0
Для выделения полезной информации с приемного датчика 8 подают в первый селективный канал. В этом канале в компенсаторе 11 путем амплитудной и фазовой подстройки напряжения от
5 генератор 7 формируют компенсирующий сигнал, равный по амплитуде и противоположный по фазе мешающему сигналу, смешивают его с поступгшэщим от приемного датчика 8 сигнала0ми, подавляя в них помехи и выделяя полезные сигналы. С выхода компенсатора 11 полезные сигналы следуют в усилитель 14, где их усиливают до уровня, обеспечивающего четкую работу амплитудного селектора 17. Пос
5 ле амплитудной селекции сигналы с выхода селектора 17, пропускающего сигналы только от доброкачественного якоря, поступают на информационный вход триггера 20, который, срабатнвая фиксирует наличие сигналов, а появление на его выходе сигнала О указывают на отсутствие обрывов в обмотке якоря. При наличии обрыва в обмотке якоря сигналы на выходе селектора 17 отсутствуют. Триггер 20 остается в исходном положении, а сигнал 1 на его выходе указывает на наличие обрыва и обмотке якоря. При перемещении вращающегося доброкачественного якоря во второй и третьей зонах контроля электромагнитным полем индукторных датчиков 5 и б последовательно воздействуют на активные стороны секций в каждом из его пазов и возбуждают в обыргке яко ря встречные ЭДС, в результате чего ток и поле в нем отсутствуют. Если в проверяемом якоре имеются межвитковые, межсекционные или коллекторные замыкания, то над пазами его возбуждаемых дефектных секций возникает по ле, образованное токами короткоеамкнутых контуров. Одновременно приемными датчиками 9 и 10 измеряют над пазами возбуж даемых секций якоря не только его по ле, но и, несмотря на экранирование, поле рассеяния индукторных датчиков 5 и 6. Причем сигналы неустраненных помех, предварительно сниженных встречным включением обмоток этих датчиков, соизмеримы или превышают полезные сигналы, индуцированные в них полем дефектного якоря с малыми витковыми замыканиями или с замыканиями через повышенные переходные сопротивления. Для выделения полезной информации измеренные сигналы с приемных датчиков 9 или 10 подают во второй или третий селективный канал, где их пропускают через компенсатор 12 или 13 помех, подавляя в них помехи, уси ливают в усилителе 15 или 16, селектируют по амплитуде в селекторе 18 или 19, пропускающего только сигналы замыканий, и при дешьнейшем прохождении ф 1ксируют в 21 .или 22. При срабатывании последних на их выходах появляются сигн&лы I которые через схему 23 сборки поступают на первый вход схемы 25 сов падения, указывая наличие замыканий в обмотке проверяемого якоря. Бели контролируемые сигналы не проходят через селекторы 18 и 19, т триггеры 21 к 22 остаются в исходно положении и сигналы О на их выхадах указывают на отсутствие замыканий S проверяемом якоре. В момент прохождения проверяемого якоря над конечным датчиком 3 контроль его обмотки прекращается, производите анализ полученной информации и на его основе принятие решения о годности или дефектности якоря, пропуска на дальнейшие технологические операции или его удаление и разбраковку по виду дефекта. При этом на выходе датчика 3 появляется кратковременный сигнал 1, который поступает на вторые входы схемы 24 и 25 совпадения и на второй вход блока 1 управления, прерывая его работу. Отключается генератор 7 и запираются входы триггеров 20 - 22. Одновременно, если проверяемый якорь является дефектным, на выходе схемы 24 или 25 совпадения формируется кратковременный сигнал О, который поступает на второй или первый вход блока 26 формирования команд, управляющего исполнительным 27. При попадании дефектного якоря в зону удаления брака исполнительный блок 27 по команде с блока 26 формирования команд снимает этот якорь с панели 28 и транспортирует его в зависимости от вида дефекта в соответствуюций бункер, а затем возвращается в исходное положение. Если проверяемый якорь является доброкачественным, то он беспрепятственно проходит зону удаления брака и попадает на транспортер технологической линии. Предлагаемое устройство наиболее целесообразно применять для проверки якорей на заводах в условиях массового производства микродвигателей, на автоматизированных технологических линиях, где необходима автоматизация контроля, удаления и разбраковки якорей на промежуточных и окончательной стадиях их изготовлеиия. I Предлагаемое устройство в отличие от известных обеспечивает автоматизацию контроля и разбраковки якорей В процессе их перег ющения в технологических линиях, снижение затрат времени на контрольные операции. Формула изобретения 1. Устройство для контроля обмотки якоря мнкроэлектродвигателя, со держащее приводной механизм проверяемого якоря, основные Ш-образные и индукторный и приемный датчики, размещенные в параллельных плоскостях на расстоянии друг от друга в пределах длины пакета проверяемого якоря, П-образные индукторным и приемный датчики; установленные в одной
плоскости на расстоянии друг от друга, равном длине пакета проверяемого якоря, генератор переменного тока повышенной частоты, соединенный с П-образным индукторным датчиком, три блока выделения сигналов, включающих входные усилители, амплитудные селекторы и триггеры, блок управления, первый вход которого соединен с установочными входами триггеров, второй выход - с управляющими входами генератора и триггеров, общую панель для крепления датчиков, отличающееся тем, что, с целью повышения точности разбраковки якорей по виду дефектов в процессе изготовления, в устройство введены дополнительные Ш-образные индукторные и приемные датчики, два датчика контроля положения проверяемого якоря, три компенсатора помех, схема сборки, две схемы совпадения, блок формирования команд и подключенный к нему исполнительный блок для удёшения и разбраковки дефектных якорей, основные и дополнительные Ш-образные датчики объединены в две группы последовательно соединенных индукторных датчиков, которые подключены к генератору переменного тока, и в две группы последовательно соединенных приеммых датчиков, которые вместе с П-образными индукторным, и приемным датчиками закреплены перпендикулярно к общей панели, установленной под углом относительно горизонтальной плоскости, и размещены на панели последовательно по ходу перемещения проверяемого якоря так, что плоскость расположения П-образных датчиков перпендикулярна плоскостям расположения Ш-образных датчиков, а датчики для контроля положения проверяемого якоря установлены на панели соответственно перед П-образными датчиками и после Ш-образных датчиков, причем выходы П-образного приемного датчика и двух групп Ш-обраэных приемных датчиков лодключены к основным входам соответствующих компенсаторов помех, вспомогательные входы которых соединены с выходом генератора, их выходы - с входами соответствующих блоков выделения сигналов, выходы двух из которых подключены через схему сборки к первому входу второй схемы совпадения, выход третьего - к первому входу первой схемы совпащения, первый вход блока управления соединен
с одним из датчиков для контроля положения проверяемого якоря, второй его вход - с другим датчиком для контроля положения якоря и с.вторыми входами схем совпадения, выходы
которых подключены к соответствующим входам блока формирования команд для исполнительного блока.
2. Устройство по п. 1, отличающееся тем, что, с целью
повышения точности контроля, в каждой из групп Ш-обраэные датчики установлены линейно в одной плоскости вплотную друг к другу, образуя единую электромагнитную систему, причем
обмотки индукторных датчиков соедийены последовательно-согласно, обмотки приемных датчиков - последовательно-встречно, а первые группы индукторных и приемных датчиков смещены по ходу перемещения проверяемого якоря относительно их вторых групп на половину расстояния между зубцами проверяемого якоря
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 535666, кл. Н 02 К 15/00, 1973.
2. Авторское свидетельство СССР 657527,кл.Н 02 К 15/00, 1977,
fffffpO/TfOpf/
м
0uf.J
H KotfojtoM mpaMCfrop/nfft

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для комплексного контроля дефектов в обмотке якоря электрической машины | 1976 |
|
SU657527A1 |
| Устройство для контроля параметров вращения электрических машин постоянного тока | 1980 |
|
SU1008675A1 |
| Вихретоковый дефектоскоп для контроля цилиндрических изделий | 1988 |
|
SU1589196A1 |
| Устройство для обнаружения замыканий при испытании изоляции обмоток электрических машин | 1983 |
|
SU1114988A1 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2526500C1 |
| Система телемеханики с временным разделением каналов для электрической централизации стрелок и сигналов | 1985 |
|
SU1345362A1 |
| Устройство для проверки магнитных сердечников | 1980 |
|
SU930182A1 |
| Автомат для контроля и разбраковки деталей | 1987 |
|
SU1470363A1 |
| Устройство для разбраковки и контроля микросхем постоянной памяти | 1985 |
|
SU1336121A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ БИОЛОГИЧЕСКОЙ АКТИВНОСТИ МОЗГА | 1993 |
|
RU2076625C1 |