Изобретение относится к лесозаготовительной технике и может быть использовано для валки и трелевки деревьев при ведении горных лесозаготово
Известна каретка для валки и трелевки деревьев, включающая корпус, перемещающийся по несущему канату с помощью ходовых тележек, и манипулятор с захватно-срезающим устройством 1 .
Недостатком конструкции является низкая механизация и автоматизация процесса валки и трелевки деревьев.
Цель изобретения - повышение механизации и автоматизации процесса валки и трелевки деревьев, а также . увеличение производительности труда на этих операциях.
Достигается это тем, что в каретке для валки и трелевки деревьев, включающей корпус, перемещающийся по несущему канату с помощью ходо-- вых тележек, и манипулятор с захвати но-срезающим устройством, в корпусе установлена двухсторонняя телескопическая балка с зажимами несущего каната, снабженными подвижной плитой и гидроцилиндром, а захватносрезающее устройство посредством рычага шарнирно присоединено к одному из зажимов и посредством дополнительного гидроцилиндра - к каретки.
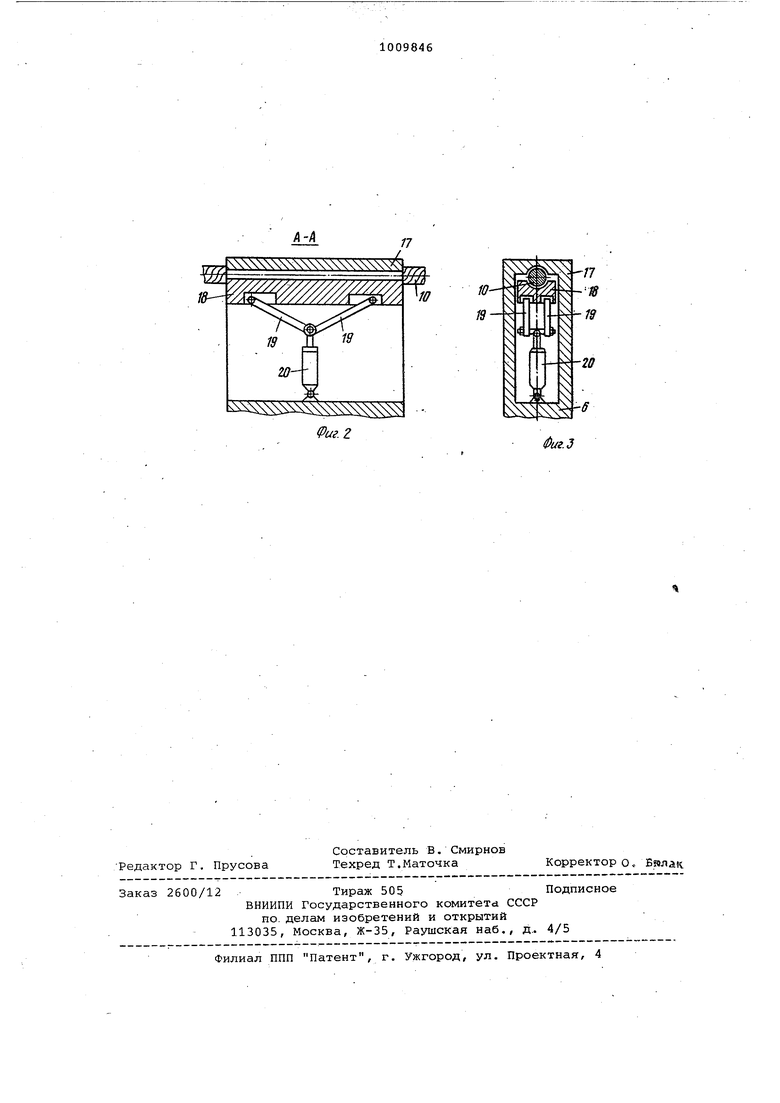
На фиг. 1 показана предлагаемая каретка для валки и трелевки дерег вьев, общий вид; на фиг.. 2 - разрез А-А на-фиг. 1; на фиг. 3 - автоматический зажим несущего каната, вид сбоку.
Каретка для валки и трелевки дере вьев содержит центральный корпус 1, в который вставлена двухсторонняя телескопическая балка 2, концы двухсторонней балки опираются на правый
3и левый 4 промежуточные корпусы каретки- и жестко соединены с правым
5и левым б автоматическими зажимами несущего каната. Центральный левый
4и правый3 корпусы каретки шарнирно соединены с ходовыми тележками 7-9, которые навешены на несущий канат 10. ,
К левому автоматическому зажиму
6шарнирно присоединен рычаг 11 манипулятора, к которому также шарнирно присоединено захватно-срезающее устройство 12, наёодка которого на дерево 13 осуществляется гидроцилиндром 14, шарнирно соединенным с захватно-срезающим устройством и рычагом 11 манипулятора и гидроцилинд- .
ром.15, шарнирно соединенным с рычагом манипулятора и левым промежуточным корпусом 4 каретки.
Головка 16 левого и правого автоматического зажима имеет верхнюю
опору 17 и нижнюю подвижную плиту 18 .шарнирно соединенную рычагами 19 с гидроцилиндром 20, установленным в корпусе автоматического зажима несущего каната.
Работает каретка для валки и трелевки деревьев следующим образом.
Предварительно на лесосеке монтируется канатная система, состоящая из несущего каната 10 и самоходной лебедки С не показано) .Зауемна несущий канат навешиваются ходовые тележки 7-9 валочно-трелевочной каретки. Оператор, управляя дистанционно, включает цилиндр 20 левого автоматического зажима 6, при этом подвижная плита 18 прижимает несущий канат 10 к верхней опоре 17, а правый автоматический зажим 5 остается свободным. Затем подается команда на складывание двухсторонней телескопической балки 2, при. этом ходовые тележки 8 и 7 перемещаются по канату к ходовой тележке 9,
Как только балка полностью сложилась, правый автоматический зажим 5 закрепляется на несущем канате, а левый б освобождается и сразу же автоматически выдается команда на раздвигание телескопической балки 2, ходовые тележки 9 и 8 отходят от ходовой тележки 7. таким образом ва;Лочно-трелевочная каретка перемеща(ется по несущему канату.
По дистанционной команде оператора в месте валки деревьев левый б и правый 5 автоматические зажимы закрепляются на несущем канате 10, а оператор, дистанционно управляя рычагом 11 манипулятора с помощью 40 гидроцилиндров 14 и 15, наводит захватно-срезающее устройство 12 на дерево 13 и срезает его с корня, при этом захватно-срезающее устрой- . ство из вертикального положения г переходит в горизонтальное и сразу же освобождается левый автоматический Зажим б и двухсторонняя телескопическая балка 2 начинает складываться и перемещаться в обратном направлении, трелюя дерево 13, зажатое в захватно-срезающем устройстве 12 к подножию склона, причем высота поднятия комля над грунтом ле.сосеки регулируется гидроцилиндрами 14 и 15. По прибытию к месту складирования подается команда на раскрытие рычагов захватно-срезающего устройства, дерево выпадает и цикл перемещения каретки, а затем валки и трелевки очередного дерева повторяется 0 Технико-экономический эффект достигается за счет сокращения монхажно-демонтажных работ, а также сокращения ручного труда на валке и трелевке деревьев, что позволит 5 поднять сменную производительность.
Фиг. г
Фиг.З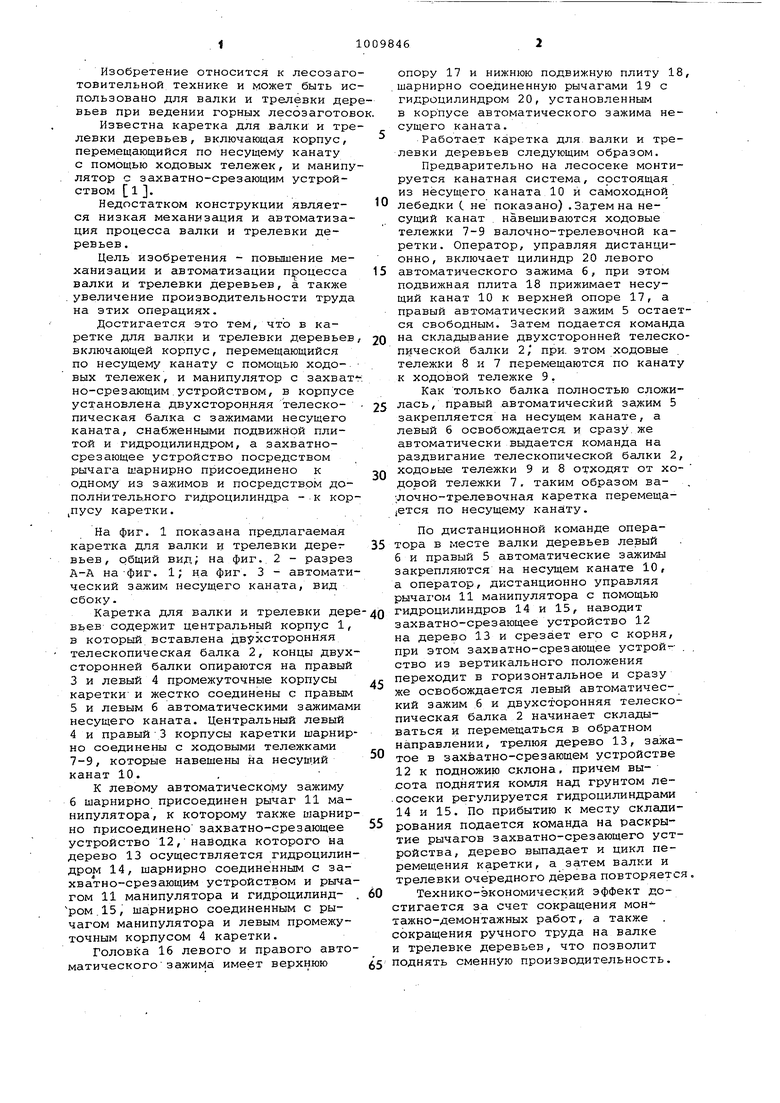
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| СПОСОБ РАЗРАБОТКИ ЛЕСОСЕКИ С УСТРАНЕНИЕМ ЗАВИСИМОСТИ РАБОТ ОТ ПРИРОДНЫХ УСЛОВИЙ | 2007 |
|
RU2366161C2 |
| Лесозаготовительная машина | 1971 |
|
SU439264A1 |
| Установка для валки и трелевкидЕРЕВьЕВ | 1979 |
|
SU829047A1 |
| Лесозаготовительная машина | 1981 |
|
SU1061753A1 |
| Устройство для валки,пакетирования и транспортирования деревьев | 1980 |
|
SU873973A1 |
| Трелевочная каретка | 1977 |
|
SU617310A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1991 |
|
RU2021159C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 2006 |
|
RU2318370C1 |
| Трелевочная каретка | 1981 |
|
SU1009849A1 |
КАРЕТКА ДЛЯ ВАЛКИ И ТРЕЛЕВКИ .ДЕРЕВЬЕВ, включаяхцая корпус, перемещающийся по несущему канату с помощью ходовых тележек, и йанипулятор с захватно-срезающим устройством, отличающаяся тем, что, с целью повышения механизации и автоматизации процесса валки и трелевки деревьев, а также увеличения производительности труда, в корпусе каретки установлена двухсторонняя телескопическая балка с зажимами несущего каната, снабженными подвижной плитой и гидроцилиндром, а за сватно-срезающее устройство посредством рычага шарнирно присоединено к одному из зажимов и посредством дополнительного гидроцилиндра - к корпусу каретки.(П См СО 00 4 qt)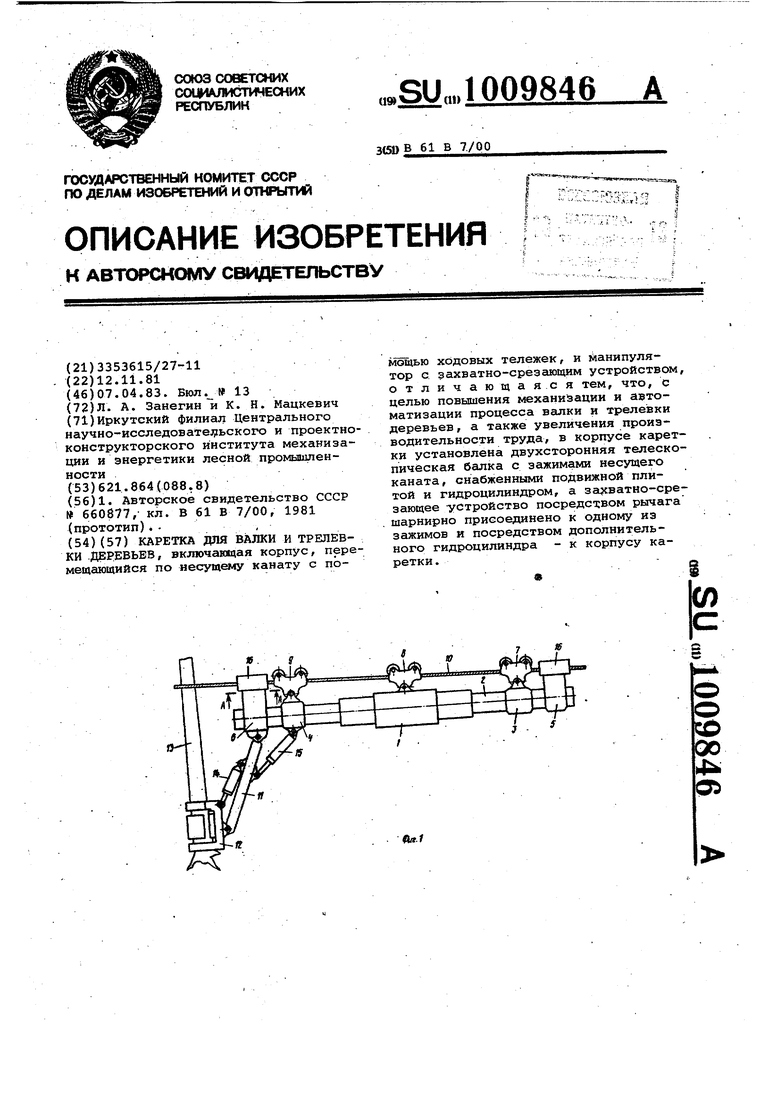
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Канатная трелевочная установка | 1977 |
|
SU660877A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
