Предметом изобретения является нееовой дозатор 1гепрерьшного действия Д.1И сыпучих материалов, оборудованный электромагиитны.м питателем, весовым транепортером и автоматической следящей системой.
Отличительная особенность конструкции описываемого дозатора состоит в том, что точиое дозирование материа.юв обеспечивается системой автоматического регулирования, основаииой на функциональной зависимости положения главного весовоjo коромысла от напряжения на катупшах электромагнитного питателя. В качестве чувствительно1о элемеига, фиксирующего отк,юнение весового коромысла от нулевого положения, применен дифференциальный индуктивный датчик с двухкаскадным магнитным усилителем, обратной связью и дросселем насыщения. В схему автоматического регулирования введено устройство, обеепечиваклцее по.чучеиие на выходе индуктивного датчика напряжения, про горционального отклонению весового коро гысла и скорости его движения.
Вариант конструктивного вьпюлнения системы автоматического регу/пгрования предусматривает нримеиеине следящей системы па ионных управ.чяемьгх вьп1рямителях д.тя регу.трования напряжения на оомотках электромагнит {ого питателя в .iai3HCHMOCTH от веса дозируемого ма1ериала.
Такое ycTpoiicTBt) дозатора обеспечивает его высокую производительность 11 возможность ее дистанционного измеиення, исключает необходимость корректирования при изменеинн уровня дозируемого материала в бункере но.тожения засло1н н (щибера) течки бункера, влажности, фракции мат.ериала и напряжения Н1ггак) электросети.
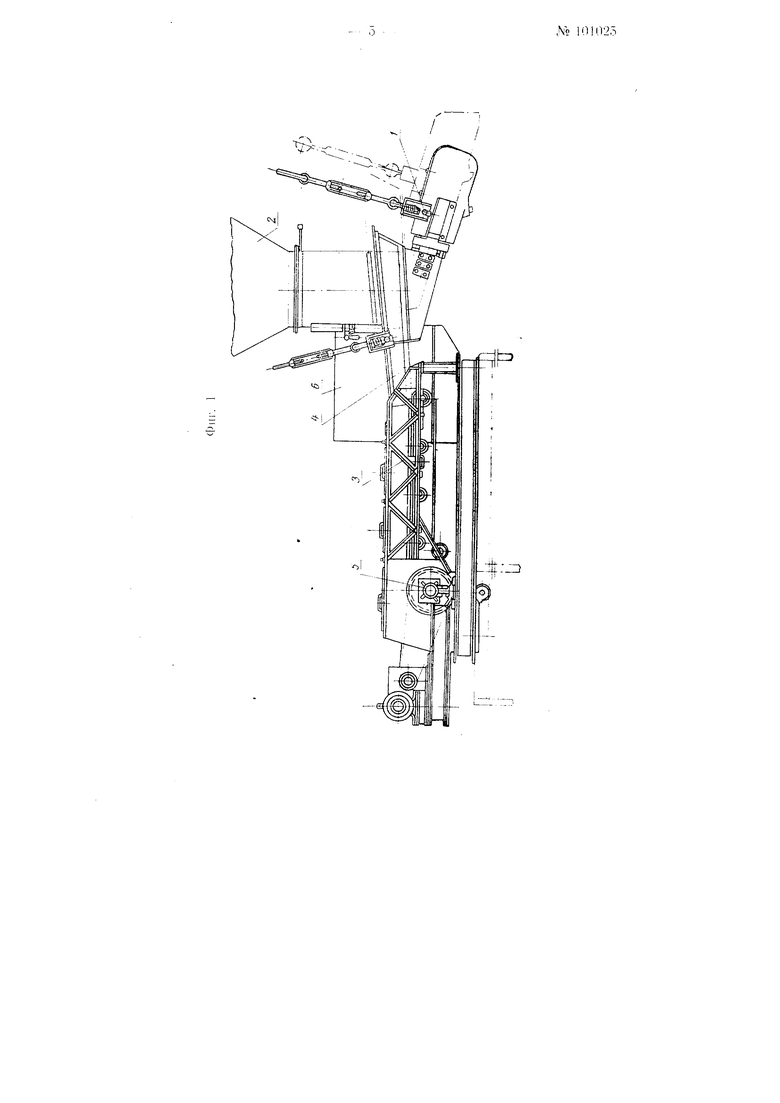
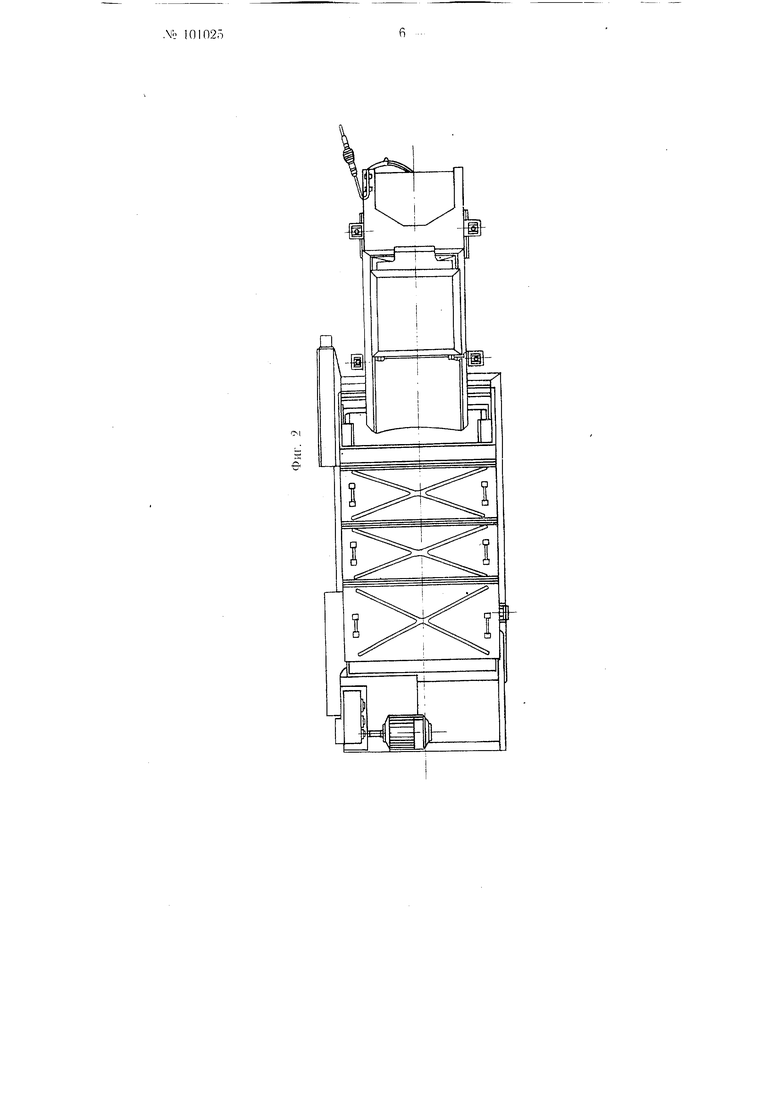
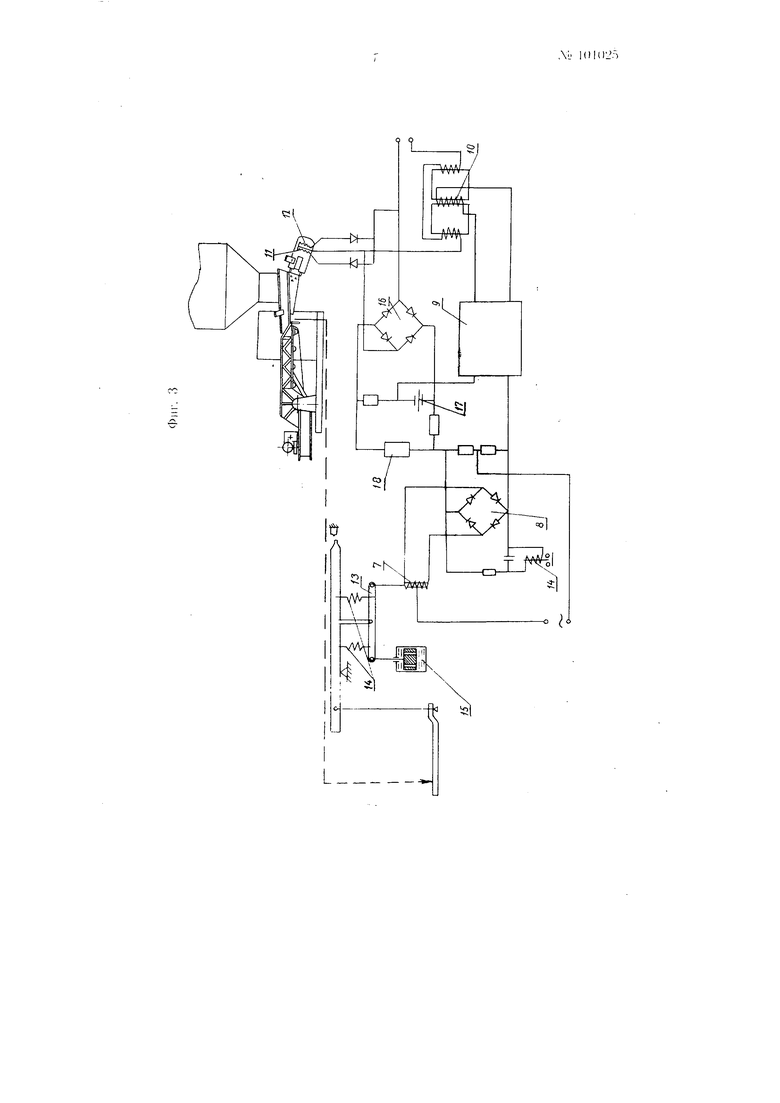
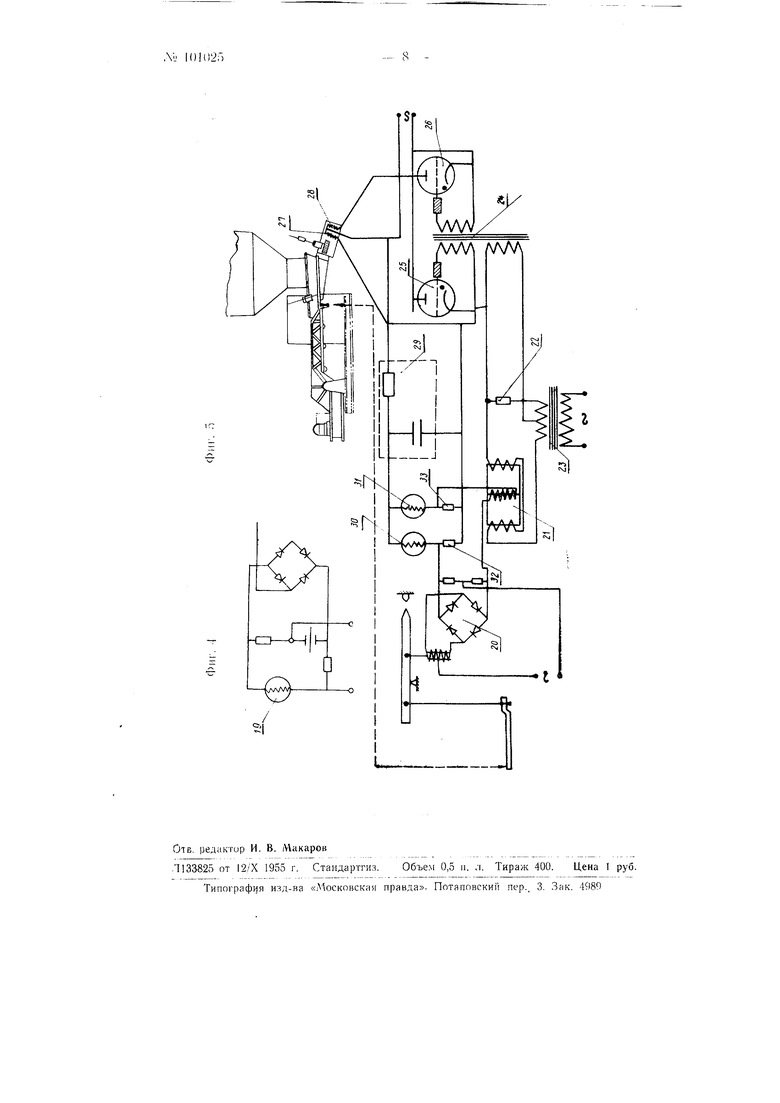
На фиг. 1 н 2 изображена моитажная схема дозатора в двух проекциях; на фиг. 3 схема автоматического регу.тнровання работы дозатора (1-й вариаит); на фиг. 4 - -- схема нелинейпого иперцнонного сопрогив.чення; иа фиг. 5 - схема автомагнческого регу.щроваиия работы .loчатора (2-й вариант).
Дозатор (фиг. 1 и 2) состоит из -j.ieKxpOMarHHTHoro гнггателя 1, расположеиного под расходным бункером 2, ленточного весового транспортера . и системы автоматического регу.тировагпгя, которая может быть выполнена в двух конструктивных вариантах (фиг- 3-о).
Рабочей частью двухтактного электромагннтного питателя с.тужнт .шток 4. составляюппп одно целое с
якорем обоих с)лекгромагнитов питателя; питлние электромагнитов осуществляется по схеме с однополупериодным выпрямлением. При прохождении тока через катушку каждого электромагнита последний попеременно притягивает и отпускает якорь, который колеблется вместе с лотком с частотой колебаний, равной частоте переменного тока. Лоток через систему плоских рессор связан с массивным корпусом питателя; жесткость пакета рессор подбирается из условия работы питателя в резонанс. Изменение производительности питателя осуществляется посредством кз.менения напряжения, подаваемого на об Мотки электромагнитов.
Весовой ленточный транспортер снабжен ножевыми опорами 5 и связан передаточными рычагами с весовым устройством, состоящим и:-. главного и нескольких рабочих коромысел, заключенных в 6 и включаемых в работу дистанционно посредством электро-или пневмопривода. На главном коромысле распо.-южен датчик системы автоматического регулирования; рабочие коро.мысла снабжены подвин ными гирями, которые служат для изменения производительности дозатора.
Точность дозирования материала обеспечивается системой автоматического регулирования, действие которой заключается в создании необходимой функциональной зависимости между положением главного коромысла весового устройства и напряжением на катушках электромагнитного гштателя. Система автоматического регулирования может быть конструктипио выполнена в двух варианта.х.
В нервом варианте (фиг. 3) в качестве чувствительиого элемента, поскрипи мающего отк.чопемио коромыс.ча iiy.ieBoro положения, примепсп диффере1П|па.Из}и 1Й индуктивпый датчик 7, вк;иоче1П1ЫЙ в мостовую схему. Напряжение рассогласования после выпрямления посредством фазсчувствите. ьного выпрямите.тя 8 усиливается двухкаскадныч .магнитным усилителем 9-10 и подается па катуинчи // и 12 соответственно электромагнитов rnrraTc.isi и гЛ)1прямите,чя.
Первый каскад является усилите.1ем напряжения и выполнен в виде .магиит1юго усилителя с внутренней ио.тожительной обратной связью, обеспечивающей высокий коэффициент усиления, и вы.ход на постоянном токе. Второй каскад является усилителе.м мощности и представляет собой дроссель насыщения, включенный в цепь электромаппп1ЮГО питателя.
Для повышения устойчивости и быстрого срабатывания автолгатического устройства применено регулирование по производной от сигнала рассогласования и жесткая обратная связь. С этой целью в схему введено -дифференциирующее устройство, выгюлненное в виде про.межуточпого рычага 13, связанного с главным весовым коромыслом щарниром и двуJмя пружинами 14. Один конец рычага соединен с порищем масляного демпфера 15, а другой - с сердечником индуктивного датчика. Жесткая обратная связь осуществляется посредством подачи части выходноп; сигнала (с катушек питателя) на вход магнитного усилите.тя навстречу сигналу индуктивного датчика.
Напряжение с выхода системы пос.че выпрямления при прохождении через выпрямитель 16 поступает на мостовую схему с нелинейным сопротивлением 17 в качестве одного плеча моста. Напряжеиие на диагонали моста, соединенной с входом магнитного усилителя, изменяется относительио иекоторого среднего знамеиия при изменении напряжения на электромагнитном питателе. Среднее значение иапрял еиия задается в зависимости от требуемой производительности дозатора посредством реостата 18 задания, включенного в одно из плеч моста.
Для исключения из схемы реостага задаПИЯ и уменьшения величины остаточной неравномерности в систему автоматического регулирования может 6biTij введена гибкая обратная связь. В этом случае в мостик обратной связи вместо реостата задания нк.-поче1-1О пе.тинейное инерционное сопротивление 19 (фиг. 4).
Во втором вариаите (фиг. о) для регл.чирования напряжения па обмотках катмисК 1И1тате,1я псп(.).1 дуется следящая система на ионных управляемг 1х выпрямителях.
Напряжение рассогласования гнимается с мостовой схемы датчнка. включающей кольцевой фазочувствнтельный выпрямитель 20, и вместе с напряжением на выходе цепи обратной связи подается на обмотку подмагничивапня дросселя 21 пасындения. Последний совместно г coTipcтнв.теннем 22 к р,торичной обмотко| | трансформатора 23 составляет (Ьазос 1ец1;аЕО1цую схему- Выходное Haiipn женис с фазосмещаюшей схемы подается иа первичную обмотку ппктрансформатора 24, две р торичнг11х oб roтки кото1)ото вк.гюче1п 1 в сеточные цепи тиратронов 25 и 2fi. регу.тирующих ток в обмо-тках г).1ектроматиитов 27 и 28 питателя.
Обратная связь в схеме с.чужи: .ч.чя стабилизации системы и спимается с одной из катушек электромагнита через фильтр 29. В схеме нримеиеиа запаздывающая изодромная связь, осуществляемая посредством мостика из двух нелинейных сопротивлений 30 и 31 н двух постоянных сопротивлений 32 ц 55.
Для дистанционного контроля за правильностью работы дозатора в обоих вариантах схемы предусмотрена возможность включения в мостовую схему датчиков реле време1П1, отрегулировашюто таким образом, чтобы оно срабатывало нри нахо-ждеииц главного весового коромысла одном из крайних положений. Реле угастраивается на определенный интервал врелгени, после выдержки которого реле срабатывает н включает н.епи сигнальных устройств. Световой или звуковой сигналы уве.домляют обслуживающий персонал о нарушении правильной работы дозатора.
П р е л. м с т и :- обре .г е н и я
I. Весовой дозатор сыпучих матер и а.то в. состоящий и, -;лектромаг итног(; пнтате.гя. весового транс юртера ч автоматической следяще;; системы, о т л и ч а ю щ и и с я тем, что, с нелыо регулирования производительностн /лозатора, изменение ве.гичины напряжения тока в обмотках - лектромагнитов питателя в зависимости от нарушения заданного веса
.юзнруемого материа.1а осу1цеств.тено посредством дросселя насыщения, обмотка управления которого питается через усилитель от индуктивного датчика, кинематически связанного с коромыслом весового транс юртера.
2.Дозатор по п. 1, о т л и ч а ю1и и и с я , что изменение напря/1%чмп я на электромагнитах питателя осун ествлено посредством ионных 1 111 1рямителей, сеточные цени которых 1Н1таются от тни -трансформатора, включенного в диагональ фазосмещающего мостика, одним из которого служпт дроссель, под 1агнич ваемы1 1 выпрямленным напpяжeииe от иидуктивного датчика, к1П1ематически связанного с коромыслом весового транспортера.
3.Дозатор по пп. 1 и 2, отлич а ю щ и и с я тем, что, с целью достижения устойчивого регулирования его производительности, в следящей системе применена отрицательная обратная связь, осуществляемая посредством подачи напряжения с электромагнитного питателя на вход магнитного усилителя через вынрямитель и мостовую схему, плечами которой являются два постоянных сопротивления, иел1щейпое сопротивление и регуиГгируемое сонротивление для задания производительности.
4.Дозатор по пп. 1-3, отлич а кт И1 i-i и с я тем, что. с целью ;10лучс1И я гибкой обратной связи и автоматической перестройки следя цей системы на требуемую произво.дительность дозатора, в мостик обратиой связи взамен реостата включено иелииейно.е инерционное сонротивление.
5.Дозатор по нп, 1-4, о т л ич а ю щ и и с я тем, что в следящет системе применено регулирование по отклонешпо н скорости отклонения ,есового коромысла, для чего сердечник индуктивного датчзнча соединен с ;2есовым коромыслом дополнительным пычагом, К1П1ематически связаичым с коромыслом упругими тягами ii снабженным на одном конце лемифером.
6.Дозатор по нп, 1-5, отлич а ю 1Ц и и с я тем, что в следящей системе применена гибкая обратная
ль 1U10254
связь с запаздыванием, д:1и чеги мое-чающийся тем, что. с целью обестик связи составлен из постоянныхпечения правильности его работы, в II нелинейных сопротивлений, обла-пень индуктивного датчика вк.тючено дающих различными характеристи-реле времени, включающее аварийками и разными постоянными вре-ный снгнал при нахождении весовомени,го коромысла в одном нз крайних по7. Дозатор по пп. 1 --6, о т,т и-.тожений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор цикличного действия для сыпучих и кусковых материалов | 1953 |
|
SU107995A1 |
| Весовой дозатор непрерывного действия для сыпучих и кусковых материалов | 1951 |
|
SU94512A1 |
| Вибросмеситель для приготовления бетонных и растворных смесей | 1958 |
|
SU118751A1 |
| Электровибрационное устройство | 1958 |
|
SU122426A1 |
| Газоанализатор для определения кислорода | 1960 |
|
SU142812A1 |
| Станок для формовки бетонных и железобетонных безнапорных труб | 1948 |
|
SU95700A1 |
| Устройство для определения магнитных свойств различных материалов | 1948 |
|
SU84572A2 |
| Способ повышения чувствительности магнитного газоанализатора на кислород и устройство для осуществления этого способа | 1954 |
|
SU101954A1 |
| Дозатор заполнителей бетона | 1958 |
|
SU138849A1 |
| АВТОМАТИЧЕСКИЙ ДОЗАТОР | 1972 |
|
SU336527A1 |
L