Изобретение относится к машиностроению, в частности к механизмам, преобразующим непрерывное вращательное движение от привода в прерывистое вращательное движение рабочего объекта, например, стола с закрепленными на нем изделиями для автоматической сборки, с периодическими остановами заданной продолжительности.
Известен механизм для прерывистого вращения рабочего объекта, содержащий привод, ведущий и ведомый валы, установленный на последнем кривошип, взаимодействующий с пазами мальтийского креста, связываемого с рабочим объектом, узел, передающий вращение кривошипу, и узел программного управления, включающий пространственный кулачок, взаимодействующий с ним рычаг и фиксатор положения рабочего объекта.
Узел, передающий вращение кривошипу, выполнен в виде шестеренчатой передачи, а фиксатор положения выполнен в виде рабочего пальца кривошипа Cl3.
Недостатками известного механизма является то, что он не обеспечивает достаточно высокой точности и надежности позицирования рабочего объекта и достаточно широкого диапазона соотношений периодов его вращения и останова.
Это объясняется тем, что рабочий палец кривсо1ип.а, служащий одновременно фиксатором положения рабочего объекта, может перемещаться в пазу мальтийского креста под действием случайных силовых воздействий в период останова рабочего объекта.
Кроме .того, узел, передающий вращение кривошипу,выполненный в виде шестеренчатой передачи, ограничивае возможность изменения соотношения периодов останова и вращения рабочего объекта.
Целью изобретения является повышение точности и надежности позиционирования рабочего объекта при яю-бом соотношении периодов- его вращения и останова.
Указанная цель достигается тем, что в механизме для прерывистого вращения рабочего объекта, содержащем привод, ведущий и ведомый валы, установленный на последнем кривошип взаимодействующий с пазами мальтийского креста, связываемого с рабочи объектом, узел, передающий вращение кривошипу, и узел программного управления, включающий пространственный кулачок, взаимодействующий с ни рычаг и фиксатор положения рабочего объекта, последний выполнен с упоро .и соединен с рычагом, а узел, передающий вращение кривошипу, представляет собой обгонную муфту, звездочка которой соединена с ведомым валом, обойма - с ведущим, а вилка имеет палец, взаимодействующий с упо ром.
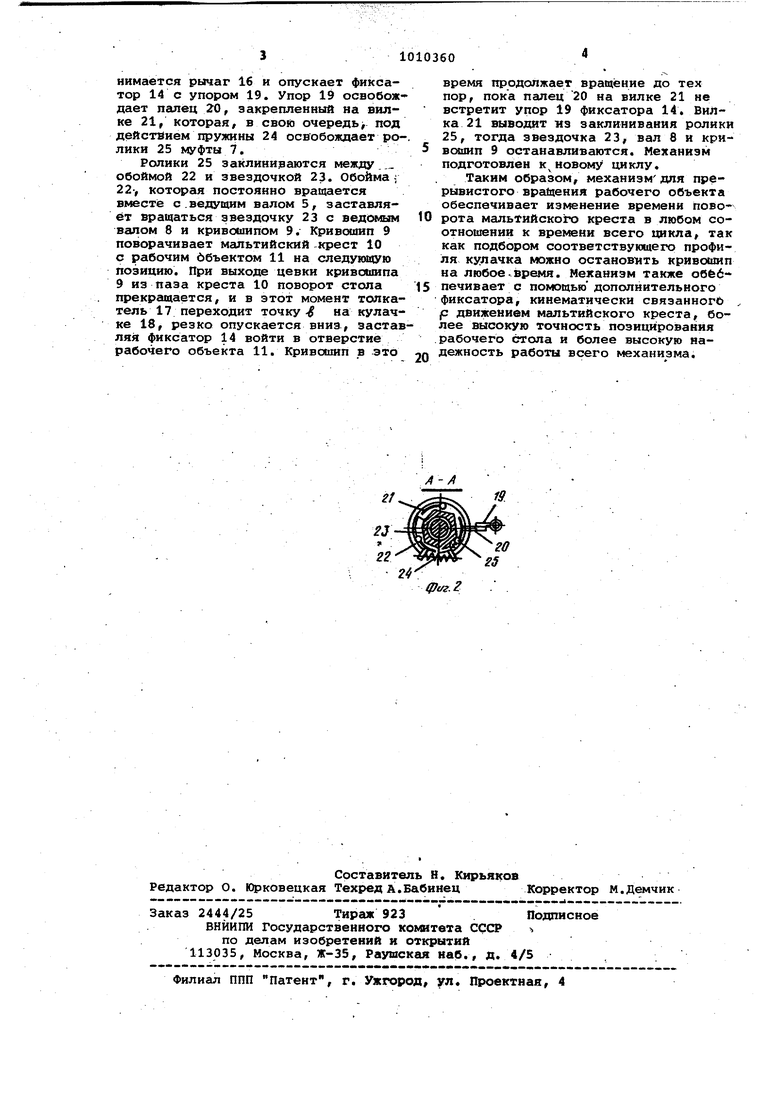
На фиг. 1 изображена кинематическая схема предлагаемого механизма; на фиг. 2 - разрез А-А на фиг. 1.
Механизм для прерывистого вращения рабочего объекта содержит электродвигатель I, соединенный через ре-
0|дуктор 2 и зубчатые,пары 3 и 4 с вё-. дущим валом 5 и йалом 6.
Обгонная муфта 7 соединяет ведущий вал 5 с ведомым валом 8, на котором жестко закреплен кривошип 9,
5 взаимодействующий с пазами мальтийского креста 10, который управляет движением рабочего объекта 11 относительно неподвижного стола 12 с исполнительными элементами (не .указаны), управляемыми кулачками 13, закрепленными на валу 6, фиксатор 14 положения рабочегообъекта выполнен раздельно от кривошипа 9 и вводится в отверстие рабочего объекта при остановах последнего посредством пружины 15.
Одновременно фиксатор 14 соединен с рычагом 16, другой конец которого через толкатель 17 взаимодействует с кулачком 18 жестко закрепленным на валу ь.
Кроме того, фиксатор 14 имеет упор 19, взаимодействующий с пальцем 20, закрепленными на вилке 21 обгонной муфты 7, обойма 22 которой
соединена с ведущим валом 5, а звездочка 23 - с ведомым валом 8.
Кроме того, звездочка 23 и вилка 21 соединены между собой пружиной 24, а ролики25 установлены между звездочкой 23 и обоймой 22.
Обгонная муфта 7 служит у,злом, передающим вращение кривошипу.
Фиксатор 14, рычаг 16 и кулачок 18 составляют узел программного управления кривошипом 9 и рабочим объектом 11.
Механизм работает следующим образом.
Ведущий вал 5 и вал 6 постоянно вращаются от электродвигателя 1 через редуктор 2 и зубчатые пары 3 и 4, причем вал 6 при помощи кулачков .13 и 18 управляет работой всего механизма по заданной программе. Каждый
цикл начинается с положения, в котором толкатель 17 находится у точки внизу, а фиксатор 14 под действием пружины 15 надежно фиксирует рабочий объект 11 с изделиями.
При вращении вала 6 от точки до точки Р происходит выполнение соответствующих операций исполнительными элементами, управляемыми от кулачков. 13.. В процессе перемещения
трлкателя от точки а до точки поднимается рычаг 16 и опускает фиксатор 14 с упором 19. Упор 19 освобождает псшец 20, закрепленный на вилке 21, которая, в свою очередь под действием пружины 24 освобождает ролики 25 муфты 7.
Ролики 25 заклиниваются между ... обоймой 22 и звездочкой 23. Обойма.; 22-, которая постоянно вращается вместе с.ведущим валом 5, заставляет вращаться звездочку 23 с ведомым валом 8 и кривошипом 9. Кривошип 9 поворачивает мальтийский крест 10 с рабочим ббъектом 11 на следуиицую позицию. При выходе цевки кривсшипа 9 из паза креста 10 поворот стола прекреицается, и в этот момент толкатель 17 переходит точку - на кулачке 18, резко опускается вниз, застав ляя фиксатор 14 войти в отверстие рабочего объекта 11. Кривошип в это
время продолжает вращение до тех пор, пока палец 20 на вилке 21 не встретит упор 19 фиксатора 14. Вилка 21 выводит из заклинивания ролики 25, тогда звездочка 23, вал 8 и кривсхоип 9 останавливаются. Механизм подготовлен коновому циклу.
Таким образом, механизм для прерывистого вра цения рабочего объекта обеспечивает изменение времени пово-
0 рота маль ийско1Х) креста в любом соотношении к времени всего цикла, так как подбором соответствующего профиля кулачка можно остановить кривошип на любое.время. Механизм также обёбпечивает с помощью дополнительного
5 фиксатора, кинематически связанного р движением мальтийского креста, более высокую точность позицйрования рабочего стола и более высокую надежность работы всего механизма.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Револьверный суппорт токарного автомата | 1981 |
|
SU992124A1 |
| БИБЛИОТЕКА | 1973 |
|
SU368696A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Устройство смены рисунка по утку к бесчелночному ткацкому станку | 1983 |
|
SU1170015A1 |
| МАЛОГАБАРИТНАЯ ХЛОПКОПРЯДИЛЬНАЯ МАШИНА ДЛЯ ВЫРАБОТКИ ПРЯЖИ ИЗ ЛЕНТЫ | 1952 |
|
SU98484A1 |
| УСТРОЙСТВО ОДНОСТОРОННЕГО ПЕРИОДИЧЕСКОГОДВИЖЕНИЯ | 1972 |
|
SU340806A1 |
| Мальтийский механизм | 1974 |
|
SU504033A1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| Устройство для прессования порошковых материалов | 1991 |
|
SU1834811A3 |
| Полуавтомат для закладки клиньев в пазы статора электрической машины | 1984 |
|
SU1354349A1 |
МЕХАНИЗМ ДЛЯ ПРЕРЫВИСТОГО ВРЩЕНИЯ РАБОЧЕГО ОБЪЕКТА, содержащий привод, ведущий и ведомый валы, установленный на последнем кривошип, взаимодействующий с пазами мальтийского креста, связываемого с рабочим объектом, узел, передающий вращение кривсяиипу, и узел программного управления, включающий пространственный кулачок, взаимодействующий с ним рычаг и фиксатор положения рабочего объекта, о тличающийся тем, что, с целью повышения точности и надежности позиционирования рабочего объекта при любом соотношении периодов его вращения и останова, фиксатор положения выполнен с упором и соединен с рычагом,, а узел, передающий вращение кривсяиипу, представляет собой обгонную муфту, звездочка которой соединена с ведомым валом, обойма - с ведущим, а вилка имеет палец, взаимодействующий с р & упором.
19
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА МАЛЬТИЙСКОГО КРЕСТА | 0 |
|
SU304384A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
