Изобретение относится к машиностроению, а именно к устройствам преобразования непрерывного вращательного движения во вращение с остановками ведомого вала, и может найти применение в различных машинах-автоматах для точного позиционирования и плавного регулирования переменной скорости движения подвижных объектов и в приводах машин, где требуется временный останов ведомого вала при работающем двигателе.
Известен способ воспроизведения вращения с остановками, заключающийся в том, что разрывают кинематическую связь механического преобразователя между ведущим и ведомым валами [1]. Устройство для осуществления данного способа может быть выполнено в виде фрикционного сцепления и тормозной системы ведомого вала, или в виде кривошипно-коромыслового механизма угловых колебаний с периодически выключаемыми обгонными муфтами, или в виде кривошипно-кулисного механизма мальтийского креста [1].
Недостатком данного способа является значительная нагруженность привода из-за жестких ударов от разрыва кинематической цепи.
Известен также способ воспроизведения вращения с остановками, заключающийся в суммировании на ведомом валу переменных скоростей вращения механического преобразователя без разрыва кинематической связи между ведущим и ведомым валами [2]. Устройство для осуществления этого способа выполнено в виде совокупности кривошипно-коромыслового рычажного и зубчатого механизмов [2].
Недостатком данного способа являются приближенный характер "остановок" (во время которых ведомый вал поворачивается в другую сторону) и их ограниченная продолжительность из-за неодинаковых законов суммируемых скоростей ведомого вала (который из-за этого в действительности не останавливается).
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является способ воспроизведения вращения с остановками без разрыва кинематической связи механического преобразователя в виде механизма П.Л.Чебышева [3], заключающийся в том, что звенья преобразователя постоянной структуры перемещают по шатунной кривой переменного радиуса кривизны, которая в узких пределах принимается за приближенную окружность [3].
Недостатками указанного способа являются невозможность полной и неограниченной по продолжительности точной остановки вращающегося рабочего органа при работающем двигателе, а также отсутствие плавного регулирования закона вращения ведомого вала.
Целью изобретения предлагаемого способа является обеспечение возможности полной и неограниченной по продолжительности точной остановки без разрыва кинематической цепи вращающегося рабочего органа, а также возможности плавного регулирования закона его вращения.
Это достигается за счет того, что в способе воспроизведения вращения с остановками, заключающегося в том, что непрерывное вращение ведущего вала механическим путем преобразуют в прерывистое вращение ведомого вала без разрыва кинематической связи механического преобразователя - звенья преобразователя перемещают в плоскопараллельном движении по окружностям постоянного радиуса кривизны и в процессе этого движения изменяют структуру преобразователя из параллелограммного механизма в непараллелограммный двухкривошипный механизм путем изменения длины звеньев параллелограммного механизма или путем изменения в его крайних положениях параллельного расположения ведущего и ведомого кривошипов между собой на непараллельное и наоборот.
Также известен механизм для воспроизведения вращения с остановками за счет разрыва кинематической связи между ведущим и ведомым валами, выполненный в виде кривошипно-кулисного устройства мальтийского креста, имеющего посредством разрыва связи переменную структуру при переходе от вращения к остановкам [4].
Его известными недостатками являются большие динамические нагрузки из-за жестких ударов и ограниченный из-за этого угол остановки (обычно применяют 4- или 6-пазовый крест, так как уменьшение числа пазов до 3-х повышает инерционные нагрузки в 45-80 раз [4, с.420], а двухпазовый крест с продолжительным выстоем вообще невозможен [4, с.420]. Кроме того, мальтийский крест работает только при несоосном расположении входа и выхода.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является механизм для воспроизведения вращения с остановками, содержащий механический преобразователь непрерывного вращения ведущего вала в прерывистое вращение ведомого вала без разрыва связи между ними, кинематически связанный с ведомым валом посредством зубчатой передачи, в котором механический преобразователь выполнен в виде рычажного кривошипно-коромыслового механизма постоянной структуры; колеса зубчатой передачи установлены на разных звеньях рычажного механизма, одно из зубчатых колес жестко закреплено на ведущем кривошипе, а два других шарнирно установлены на шатуне и ведомом коромысле [5].
Недостатками указанного механизма являются:
1. Приближенная и ограниченная по продолжительности и точности позиционирования "остановка" ведомого вала (45-50° угла поворота ведущего кривошипа за цикл его поворота на 360° ).
2. Во время указанной приближенной остановки происходит движение ведомого вала в обратную сторону с ударной перекладкой зазоров, что снижает надежность и быстродействие работы механизма.
3. Невозможность полного продолжительного стопорения ведомого вала при работающем двигателе.
4. Отсутствует возможность плавной настройки на режим безостановочного регулируемого вращения ведомого вала.
5. Компоновка механизма требует несоосного расположения ведущего и ведомого валов, что увеличивает его габариты.
Это достигается за счет того, что в механизме для воспроизведения вращения с остановками по предлагаемому способу, содержащем кинематически связанный с ведомым валом посредством зубчатой передачи механический преобразователь, последний снабжен устройством изменения его структуры и выполнен в виде рычажного параллелограммного механизма с ведущим и ведомым кривошипами одинаковой длины и кинематически связывающего их шатуна меньшей по сравнению с кривошипами длины, ведущий кривошип шарнирно соединен со стойкой, ведомый кривошип шарнирно соединен с ползуном, подвижно установленным на стойке и образующим с ней поступательную пару вдоль стойки, а зубчатая передача выполнена в виде ведущего и ведомого зубчатых колес одинакового диаметра, установленных вдоль ведущего кривошипа в зацеплении через промежуточную шестерню, ведущее зубчатое колесо закреплено на шатуне со стороны ведущего кривошипа, ведомое зубчатое колесо закреплено на ведомом валу соосно шарниру, соединяющему ведущий кривошип со стойкой. Ползун с ведомым кривошипом подпружинен относительно стойки, а устройство изменения структуры преобразователя может быть выполнено в виде винтовой самотормозящейся передачи, или в виде установленного на стойке поворотного кулачка, или в виде сблокированного с ведомым кривошипом выпуклого кулачка, взаимодействующего с жестко установленным на стойке ограничительным роликом, установленным со смещением относительно оси вращения ведущего кривошипа.
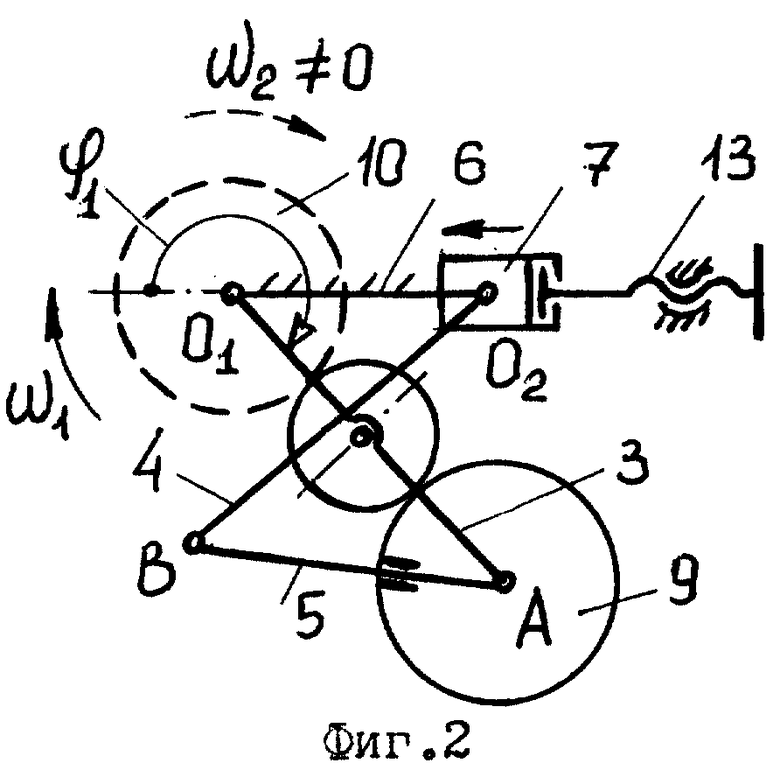
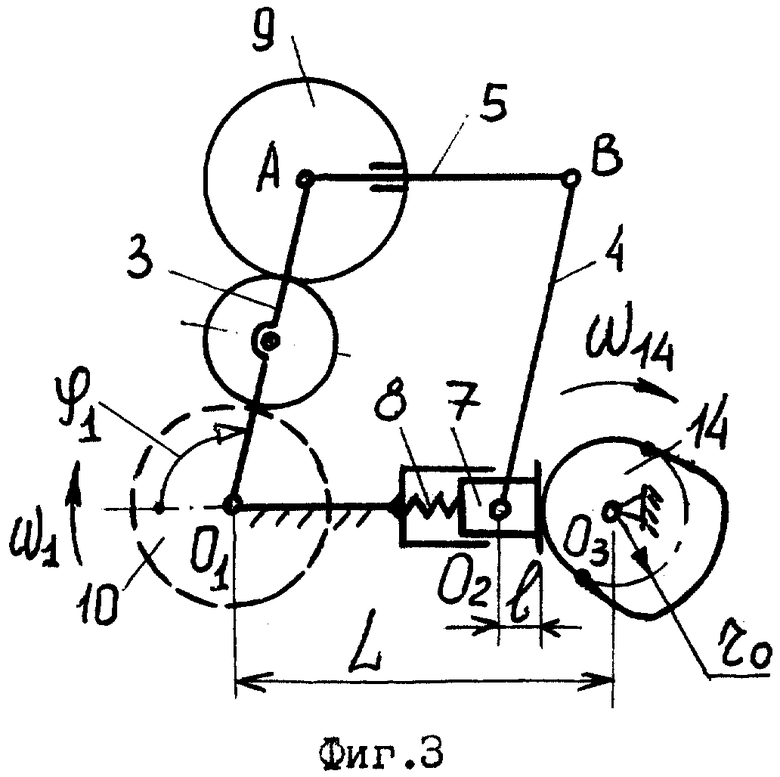
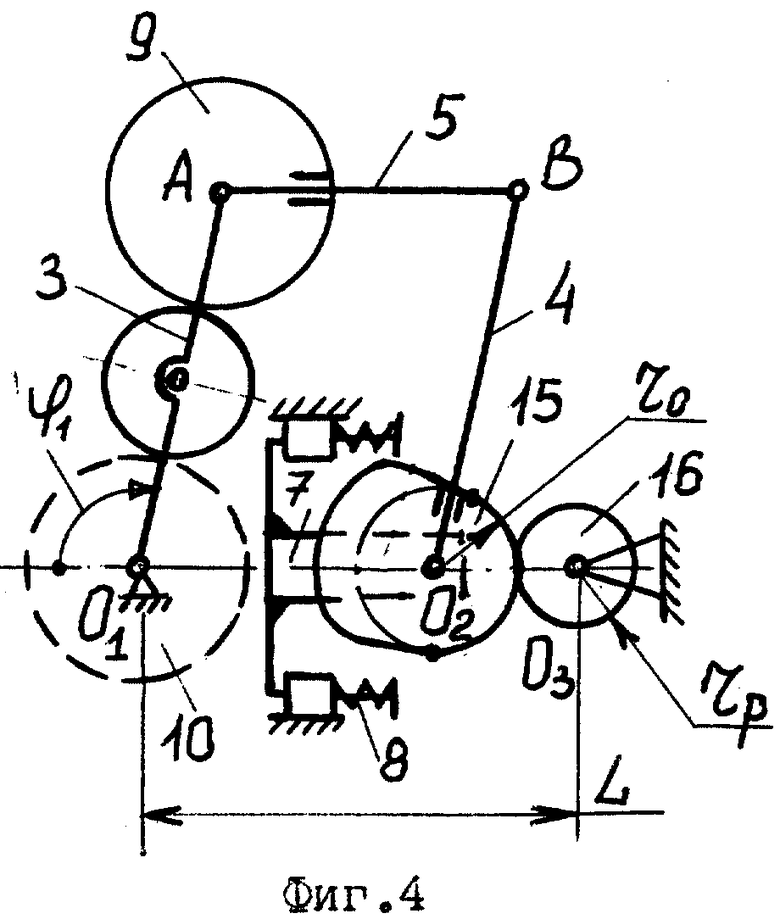
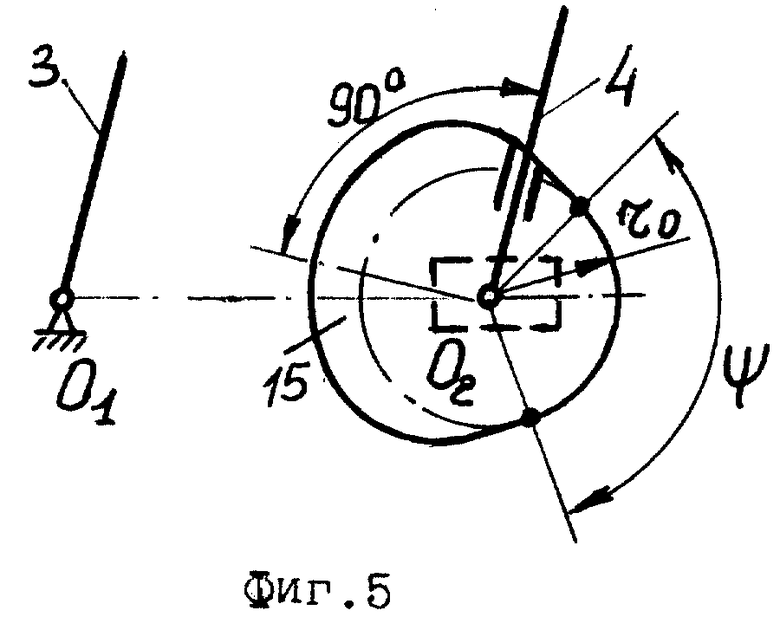
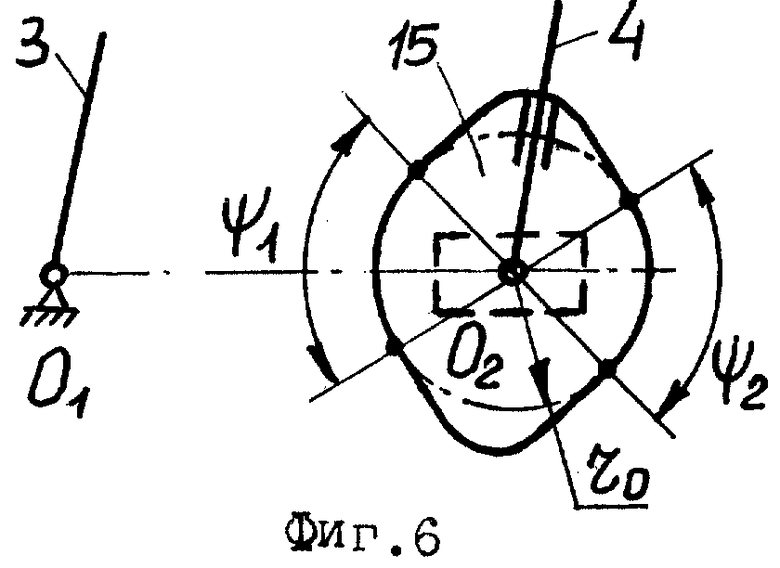
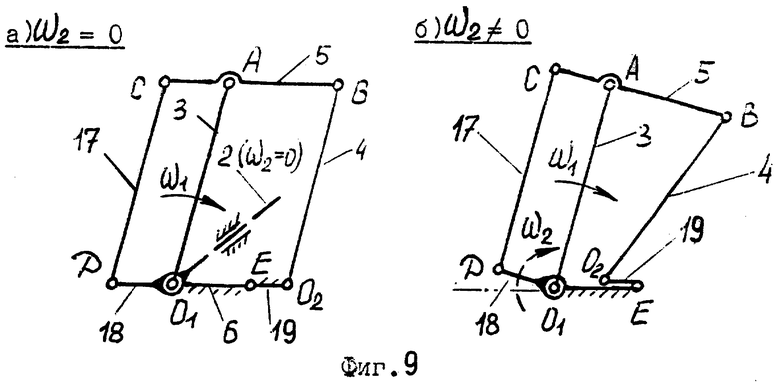
На фиг.1 и 2 представлена кинематическая схема механизма, осуществляющего предлагаемый способ воспроизведения вращения с остановками (на фиг.1 показана фаза остановки ведомого вала при O1O2=АВ, на фиг.2 показана фаза вращения ведомого вала при O1O2<АВ). На фиг.2 представлен вариант выполнения устройства изменения структуры преобразователя в виде самотормозящейся винтовой передачи. На фиг.3 представлен вариант выполнения устройства изменения структуры преобразователя в виде установленного на стойке поворотного кулачка. На фиг.4 представлен вариант выполнения устройства изменения структуры преобразователя в виде кулачка, сблокированного с ведомым кривошипом. На фиг.5 показана блокировка ведомого кривошипа с односторонне выпуклым кулачком, на фиг.6 - блокировка ведомого кривошипа с двухсторонне выпуклым кулачком.
Механизм содержит механический преобразователь непрерывного вращения ведущего вала 1 в прерывистое вращение ведомого вала 2, выполненный в виде рычажного параллелограммного механизма с ведущим кривошипом 3 и ведомым кривошипом 4 одинаковой длины  и кинематически связывающего их шатуна 5 меньшей по сравнения с кривошипами 3 и 4 длины
и кинематически связывающего их шатуна 5 меньшей по сравнения с кривошипами 3 и 4 длины . Ведущий кривошип 3 шарнирно соединен в точке O1 со стойкой 6, ведомый кривошип 4 шарнирно соединен в точке O2 с ползуном 7, подвижно установленным на стойке 6 и образующим с ней поступательную пару вдоль стойки. Ползун 7 с ведомым кривошипом 4 может быть подпружинен относительно стойки 6 посредством упругих элементов 8. Выполнение в параллелограммном механизме шатуна 5 меньшей длины по сравнению с кривошипами 3 и 4 позволяет при уменьшении длины стойки перемещением ползуна 7 (в зоне O1O2<АВ) сохранить возможность полного поворота на 360° обоих кривошипов 3 и 4 в непараллелограммном двухкривошипном механизме.
. Ведущий кривошип 3 шарнирно соединен в точке O1 со стойкой 6, ведомый кривошип 4 шарнирно соединен в точке O2 с ползуном 7, подвижно установленным на стойке 6 и образующим с ней поступательную пару вдоль стойки. Ползун 7 с ведомым кривошипом 4 может быть подпружинен относительно стойки 6 посредством упругих элементов 8. Выполнение в параллелограммном механизме шатуна 5 меньшей длины по сравнению с кривошипами 3 и 4 позволяет при уменьшении длины стойки перемещением ползуна 7 (в зоне O1O2<АВ) сохранить возможность полного поворота на 360° обоих кривошипов 3 и 4 в непараллелограммном двухкривошипном механизме.
Механический преобразователь в виде рычажного параллелограммного механизма кинематически связан с ведомым валом 2 посредством зубчатой передачи, состоящей из ведущего зубчатого колеса 9 и ведомого зубчатого колеса 10 одинакового диаметра, установленных вдоль ведущего кривошипа 3 в зацеплении через промежуточную шестерню 11. Ведущее зубчатое колесо 9 закреплено на шатуне 5 со стороны ведущего кривошипа 3, а ведомое зубчатое колесо 10 закреплено на ведомом валу 2 соосно шарниру O1, соединяющему ведущий кривошип 3 со стойкой 6.
Дополнительно механический преобразователь снабжен устройством изменения его структуры 12, которое осуществляет периодическую перестройку параллелограммного механизма в непараллелограммный двухкривошипный механизм посредством перемещения ползуна 7 с ведомым кривошипом 4 вдоль стойки 6 и может быть выполнено в виде самотормозящейся винтовой передачи 13 (фиг.2) или в виде взаимодействующего с ползуном 7 поворотного кулачка 14 (фиг.3), установленного на стойке 6 со смещением L относительно оси O1, вращения ведущего кривошипа 3, равным:
L=lAB+l+rO, (1)
где lAB - длина шатуна АВ, L - расстояние от контактного торца ползуна до центра O2 вращения ведомого кривошипа, rO - минимальный радиус профиля кулачка.
На фиг.4 представлен вариант устройства изменения структуры преобразователя, выполненного в виде сблокированного с ведомым кривошипом 4 выпуклого кулачка 15, взаимодействующего с ограничительным роликом 16, жестко установленным на стойке 6 со смещением L относительно оси O1 вращения ведущего кривошипа 3, равным:
L=lAB+rP+rO, (2)
где LAB - длина шатуна АВ, rP - радиус ограничительного ролика, rO - минимальный радиус профиля кулачка.
Кулачок 15 может быть выполнен с односторонне выпуклым профилем и сблокирован с ведомым кривошипом 4 перпендикулярно последнему, т.е. линии ВО2 (фиг.5) или выполнен с двухсторонне выпуклым профилем и сблокирован с ведомым кривошипом вдоль его длины ВО2 (фиг.6). Кулачок 15 в пределах профильного угла ψ содержит участок круглого профиля постоянного минимального радиуса rO, определяющий продолжительность точной остановки ведомого вала 2.
Предлагаемый механизм, осуществляющий способ воспроизведения вращения с остановками без разрыва кинематической связи между ведущим и ведомым валами, работает следующим образом.
При вращении ведущего кривошипа 3 с угловой скоростью (ω 1) величина угловой скорости ведомого вала 2 с установленным на нем ведомым колесом 10 (ω 2) будет определяться скоростью переносного вращения с ведущим кривошипом (ω 1) и скоростью относительного поворота в шарнире А шатуна 5 с ведущим колесом 9 относительно ведущего кривошипа 3 (ω 5-3). Согласно формуле Виллиса [5, с.139] уравнение вращения с остановками ведомого вала 2 имеет вид:

где z9, z10 - числа зубьев ведущего колеса 9 и ведомого колеса 10, ω 5-3 - скорость поворота шатуна 5 вокруг кривошипа 3 в шарнире А.
Выполнение в предлагаемом механизме колес 9 и 10 одинакового диаметра, т.е. с одинаковым числом зубьев (z9=z10) и выполнение преобразователя в виде параллелограммного механизма с одинаковой длиной кривошипов 3 и 4 обеспечивают синхронное плоскопараллельное движение (в случае равенства O1O2=АВ) как шатуна 5, так и ведущего колеса 9 по окружностям постоянного радиуса кривизны R, равного длине кривошипов (R=lO1A=lBO2). Особенностью плоскопараллельного движения звеньев 5 и 9 является нулевая абсолютная угловая скорость их вращения, т.е. происходит криволинейное поступательное движение звеньев 5 и 9 строго параллельно стойке 6, но с относительным их поворотом вокруг шарнира А со скоростью
ω 5-3 ≠ω 1. Подставляя в выражение (3) указанные значения: z9=z10, ω 5-3 ≠ ω 1, получаем ω 2=0, т.е. при непрерывном вращении ведущего вала 1 происходит полная и точная остановка неограниченной продолжительности ведомого вала 2 без разрыва кинематической связи между ними и без применения каких-либо тормозов.
Изменение с помощью устройства 12 структуры преобразователя из параллелограммного механизма с параллельным расположением между собой ведущего 3 и ведомого 4 кривошипов (случай O1O2=АВ) на непараллелограммный двухкривошипный механизм с непараллельным расположением ведущего 3 и ведомого 4 кривошипов (случай O1O2<АВ) приводит к тому, что шатун 5 с колесом 9 начинают перемещаться не параллельно стойке 6 с относительной скоростью ω 5-3≠ω 1 вокруг шарнира А, в результате чего согласно выражению (3) ведомый вал с колесом 10 также начнет вращаться (ω 2≠0). Для указанной структурной перестройки нужно устройством 12 переместить ползун 7 вдоль стойки 6 в направлении уменьшения ее длины (lO1O2<lAB). При этом за полный оборот ведущего вала 1(ϕ 1=360° ) ведомый вал 2 также повернется точно на 360° (это установлено автором на действующей модели механизма).
Отметим, что вращение ведомого вала 2 происходит с переменной внутри цикла угловой скоростью ω 2, закон которой можно регулировать за счет перемещения шарнира О2 вдоль стойки 6 в зоне O1O2<АВ (в случае увеличения длины стойки в области O1O2>АВ ведущее звено 3 не может совершать полный поворот на 360° и превращается в коромысло).
Показанный на фиг.4 вариант выполнения устройства 12 изменения структуры преобразователя в виде сблокированного с ведомым кривошипом 4 кулачка 15 обеспечивает при непрерывном вращении ведущего вала 1 автоматическое изменение структуры из параллелограммного механизма (когда кулачок 15 контактирует с роликом 16 на профиле минимального радиуса rо в пределах профильного угла ψ , это обеспечивает равенство O1O2=АВ, т.е. точную и полную остановку ведомого вала 2) в непараллелограммный двухкривошипный механизм (когда кулачок 15 контактирует с роликом 16 на выпуклой по сравнению с окружностью радиуса rо части профиля, это приводит к сдвиганию ползуна 7 в направлении O1 и уменьшению O1O2<АВ, которое сопровождается вращением ведомого вала 2). При этом применение односторонне выпуклого кулачка (фиг.5) с одним участком круглого профиля с углом ψ (rо=const) обеспечивает вращение вала 2 с одной точной остановкой внутри цикла, а применение двухсторонне выпуклого кулачка (фиг.6) с двумя участками круглого профиля (rо=const) с углами ψ 1 и ψ 2 обеспечивает вращение вала 2 с двумя точными остановками внутри цикла одинаковой (при ψ 1=ψ 2) или разной (при ψ 1≠ψ 2) продолжительности. Аналогичное вращение показанного на фиг.3 поворотного кулачка 14 (установленного отдельно от кривошипа 4) с угловой скоростью ω 14<ω 1 увеличивает продолжительность остановки ведомого вала 2 до нескольких оборотов ведущего вала 1 в пределах угла его поворота ϕ 1=ϕ 1 ост, равного:
где ψ - профильный угол круглой части профиля кулачка минимального радиуса rо=const.
Указанная на фиг.5 и на 6 блокировка кулачка 15 с ведомым кривошипом 4 перпендикулярно звену 4 (односторонне выпуклый кулачок на фиг.6) или вдоль звена 4 (двухсторонне выпуклый кулачок на фиг.6) обеспечивает уменьшение длины стойки 6 по сравнению с длиной шатуна 5 (lO1O2<lAB) в крайних положениях (когда кривошипы вытягиваются вдоль стойки) позволяет исключить в параллелограммном механизме (за счет О1О2<АВ) оба мертвых неуправляемых положения звеньев и за счет этого повысить надежность работы данного типа рычажного механизма и снизить точность его изготовления.
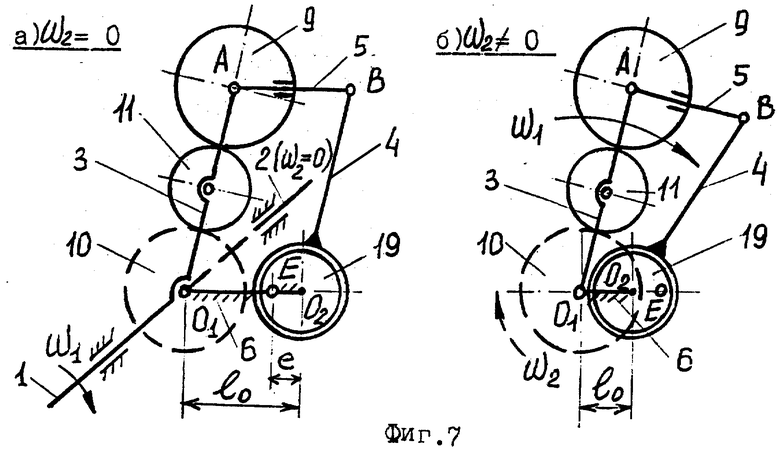
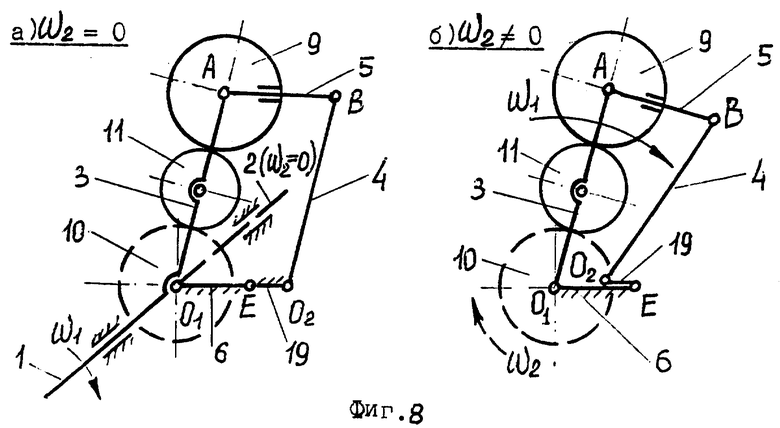
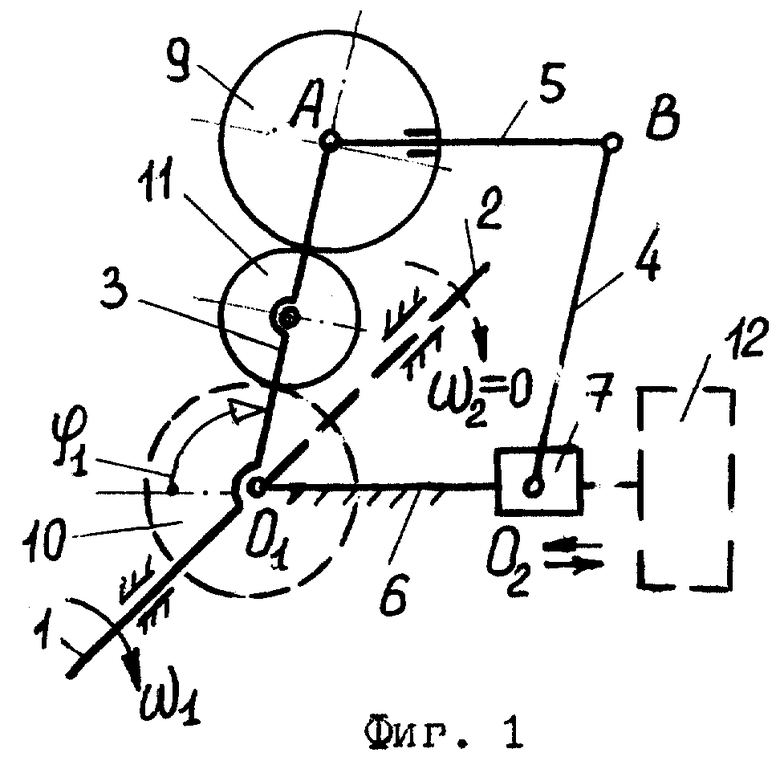
На фиг.7, 8, 9 даны дополнительные примеры выполнения схем механизмов, осуществляющих способ по пп.1 и 2. На фиг.7,а, 8,a, 9,а показана фаза остановки ведомого вала (когда механический преобразователь - это параллелограммный механизм); на фиг.7,б, 8,б, 9,б показана фаза вращения ведомого вала (когда механический преобразователь - это непараллелограммный двухкривошипный механизм): для указанного изменения структуры преобразователя уменьшают длину стойки (lo) по сравнению с длиной противоположно ей расположенного шатуна (lAB) за счет углового поворота эксцентрика (звено 19).
На фиг.7 и 8 показана кинематическая схема механизма, в котором механический преобразователь связан с ведомым валом посредством зубчатой передачи, а устройство изменения структуры механического преобразователя выполнено в виде поворотного эксцентрика 19, установленного между ведомым кривошипом (подвижное звено 4) и стойкой (звено 6). На фиг.7 показан вариант выполнения поворотного эксцентрика 19 в виде диска со смещенным на величину эксцентриситета "е" центром вращения Е относительно центра диска О2, на фиг.8 - в виде рычага длиной “е”, установленных с возможностью поворота относительно стойки и последующей фиксации на ней.
Величина эксцентриситета "е" выбирается таким образом, чтобы в крайнем правом положении поворотного эксцентрика (фиг.7,а, 8,а, 9,а) длина стойки была равна длине шатуна АВ(lO=lAB) тогда при повороте эксцентрика (звено 19) в крайнее левое положение (фиг.7,а, 8,а, 9,а) длина стойки уменьшается (lO<lAB). В пределе при выборе  при повороте эксцентрика (звено 19) в крайнее левое положение его центр О2 совместится с центром вращения ведущего вала O1 и весь механизм вращается как одно целое (ω 2=ω 1=const).
при повороте эксцентрика (звено 19) в крайнее левое положение его центр О2 совместится с центром вращения ведущего вала O1 и весь механизм вращается как одно целое (ω 2=ω 1=const).
На фиг.9 показан вариант схемы механизма, где преобразователь связан с ведомым валом (звено 2) посредством дополнительного параллелограммного механизма (образованного звеньями 3, 5, 17, 18).
Достигаемый в предлагаемом способе и осуществляющем его механизме положительный эффект заключается в следующем:
1. Периодическое вращение ведомого вала с остановками происходит без разрыва его кинематической связи с ведущим валом, что исключает динамические соударения звеньев и повышает плавность работы, надежность и быстродействие механизма.
2. Возможна настройка на один из трех режимов работы:
а) периодический поворот ведомого вала с точными и полными остановками в зависимости от профиля установленного на ползун кулачка;
б) вращение ведомого вала без остановок с переменной угловой скоростью (случай O1O2=const в области O1O2<АВ);
в) полная и неограниченная по продолжительности остановка ведомого вала (случай O1O2=АВ) без размыкания кинематической цепи и применения тормозных систем (в этом случае механизм на фиг.1 представляет собой новый тип устройства - кинематический тормоз, который в отличие от фрикционного сцепления и тормоза не имеет пробуксовок, нагрева и износа в процессе торможения.
3. Возможность плавного бесступенчатого регулирования закона вращения ведомого вала за счет перемещения шарнира O2 ведомого кривошипа вдоль стойки в области О1О2<АВ.
4. Возможность передачи вращения с остановками при соосном расположении ведущего и ведомого валов.
5. Возможность вращения ведомого вала с двумя точными внутрицикловыми остановками одинаковой или разной продолжительности за 1 оборот ведущего вала (фиг.6).
6. Исключаются мертвые неопределенные положения звеньев параллелограммного механизма за счет автоматического уменьшения кулачковым устройством длины стойки при совпадении направления одного из кривошипов с направлением стойки - это позволяет повысить надежность работы и снизить точность изготовления данного типа рычажного механизма.
Источники информации
1. Фролов К.В. и др. Теория механизмов и машин. М.: Высшая школа, 1998, с.414, рис.17.2 - аналог способа.
2. Артоболевский И.И. Механизмы в современной технике. Т.3. - М.: Наука, 1979, с.57 - аналог способа.
3. Боренштейн Ю.П. Исполнительные механизмы со сложным движением рабочих органов. - Л.: Машиностроение, 1973, с.13, рис.13 - прототип способа.
4. Фролов К.В. и др. Теория механизмов и машин. - М.: Высшая школа, 1998, с.416, рис.17.3 - аналог устройства.
5. Озол О.Г. Теория механизмов машин. - М.: Наука, 1984, с.138, рис.7.16 - прототип устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2247273C2 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ МЕХАНИЗМ С ПЕРИОДИЧЕСКИМИ ОСТАНОВКАМИ В.И. ПОЖБЕЛКО | 2003 |
|
RU2252350C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2246056C1 |
Изобретение относится к области машиностроения и может быть использовано в машинах-автоматах для точного позиционирования и плавного регулирования переменной скорости движения с остановками подвижных объектов и в приводах машин, где требуется временный останов ведомого вращающегося вала при работающем приводном двигателе. Способ заключается в том, что непрерывное вращение ведущего вала механическим путем преобразуют в прерывистое вращение ведомого вала без разрыва кинематической связи механического преобразователя путем перемещения его звеньев в плоскопараллельном движении и изменения его структуры из параллелограммного механизма в непараллелограммный двухкривошипный механизм за счет изменения длины стойки посредством перемещения вдоль нее подвижного шатуна с ведомым кривошипом преобразователя с помощью устройства изменения его структуры. Технический результат заключается в расширении кинематических возможностей способа и механизма, повышении надежности работы, обеспечении точной остановки рабочего органа с последующей регулируемой переменной скоростью его движения на одном из трех возможных режимов работы, автоматическом устранении мертвых положений в параллелограммном механизме и исключении его неопределенности, а также возможности полного продолжительного стопорения ведомого вала при работающем двигателе - без применения как фрикционного сцепления, так и каких-либо тормозов. 2 с. и 9 з.п. ф-лы, 9 ил.
| Рычажно-зубчатый двухкривошипный механизм | 1984 |
|
SU1216501A1 |
| RU 94016943 A1, 10.05.1996 | |||
| US 5547064 А, 20.08.1996 | |||
| Способ крепления наклонно-направленных скважин | 1986 |
|
SU1368425A1 |

