Изобретение относится к автомати зированньпУ системам контроля, в час ности к системам контроля цифроаналоговых аналого-цифровых, цифровых аналоговых узлов радиоэлектронной аппаратуры (РЭА). Изобретение может быть использовано при контроле интегральных микросхем и функциональных узлов на их основе (модули, ячейки, блоки), а также для их настройки. Известна программно управляемая автоматизированная система контроля функциональных узлов РЭА, содержаща блок ввода программы, блок управления, блок выработки тестовых наборо коммутатор, блок измерений, операци онный блок, блок синхронизации, бло регистрации, блок контроля программы блок совпадения. Система предназначена для контро ля параметров аналоговых, цифровых, дифроаналоговых и аналого-цифровых узлов РЭА 1. . Недостатком данной системы являются отсутствие возможности мнократного повторения (зацикливания) любого участка программы контроля, что затрудняет ее использование для проведения настроечных работ, а.также недостаточно эффективный самоконтрол „системы, позволяющий лишь контролировать нечетность., циркулирующую в системе информацию при отсутствии проверки работоспособности входящих в систему узлов. Наиболее близкой по технической сущности и достигаемому результату к предлагаемой является система для автоматического контроля параметров содержащее управляющую ЭВМ, соединен ную с генератором управляющих сигналов, входным и выходным регистрами адреса, входным и выходным регистрами кодовых комби-наций, коммутатор, связанный с генератором аналоговых сигналов, измерителем аналоговых сиг налов и регистром входной кодовой комбинации 2. Недостатками известной системы контроля являются отсутствие самоконтроля, что снижает достоверность контроля, невозможность останова на заданном наборе програг 4мы и зацикливания любого участка программы, что не позволяет использовать систему ДЛЯнастройки РЭА, а также нёвозможность работы системы с несколькими измерительными приборамиодновременн но, что снижает эффективьГость ее использования. Цель изобретения - расширение функциональных возможностей системы контроля и повышение эффективности ее использования за счет введения но вых режимов работы и повышение досто верности контроля за счет введения самоконтроля аппаратной части системы. Поставленная цель достигается тем, что в антоматизированную систему контроля параметров электронных схем содержащую пульт оператора, управляющую вычислительную машину, первые выходы которой соединены с первыми входами блока регистров адреса, с первыйми входами блока регистров входной информации, первые входы - с выходами блока регистров выходной информации, вторые входы и выходы управляющей вычислительной машины связаны с вторыми выходами и входами блока регистров адреса и с первыми выходами и входами блока синхронизации, вторые выходы которого подключены ко вторым входам блока регистров входной информации, к первым входам блока стимулирующих сигналов, блока измерителей и блока регистров выходной информации, вторые входы которого соединены с первыми выходами блока измерителей, вторы1 1и входами связанного с выходами блока регистров входной информации, ,с первыми входами первого коммутатора и вторыми входами блока стимулирующих сигналов, выходы которого соединены с вторыми входами первого коммутатора, первые выходы которого подключены к цифроBHjvi выходам системы, вторые выходы к аналоговым выходам системы, третьи входы - к цифровы входам системы, четвертые входы - к аналоговым входам системы, а третьи выходы соединены с третьими входами блока измерителей, дополнительно введены блок управления режимами, второй коммутатор, блок эталонных сигналов, выходы которого соединены с пятыми входами первого коммутатора, подключенного шестыми входами к выходам блока регистров входной информации, ко входам эталонных сигналов и к первым входам второго коммутатора, выходы которого соединены с первыми входами управляющей вычислительной машины, вторые входды - с выходами блока регистров адреса и со вторыми входами блока синхронизации, выходы которо--- го подключены к третьим входам второго коммутатора и к первьлм входам блока управления рел имамиг вторые входы которого подключены ко вторым выходам блока измерителей, четвертым входом соединенного с первым выходом блока управления режимами, третьи входы которого подключены к выходам пульта оператора, четвертые входы и вторые выходь - к третьим выходам и входам управляющей вычислительной машины, третьи выходы - к первым входам управляющей вычислительной машины, а третьи входы блока регистров выходной информации подключены к четвертым выходам первого коммутатора.
Введение вышеперечисленных блоков и связей позволяет осуществить эффективный самоконтроль системы, охватывающий практически всю ее аппаратную часть-, а также получить новые режимы работы, отсутствующие в прототипе и аналогах (заЦиклинивание любого учаска программы, останов на любом заданном шаге программы, автоматическая корректировка программы), что позволяет использовать систему не только для контроля функциональных узлов РЭА, но -и для их настройки.
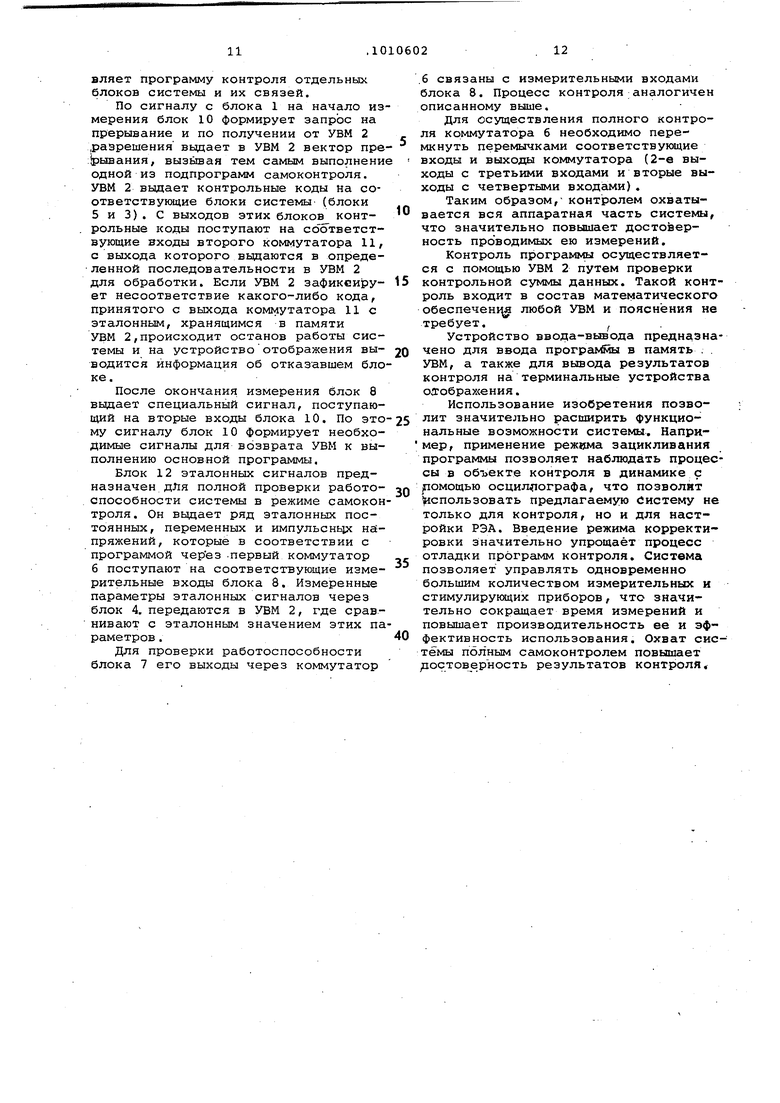
На фиг. 1 приведена блок-схема автоматизированной системы контроля параметров электронных схем; на фиг. 2 - 10 примеры выполнения отдел ных блоков, входящих в систему контроля .
Система содержит блой 1 синхронизации, управляющую вычислительную машину (УВМ) 2, блок 3 регистров входной информации, блок 4 регистров выходной информации, блок 5 регистров адреса, первый коммутатор 6, блок 7 стимулирующих сигналов, блок 8 измерителей, объект 9 контроля (контролируемая электронная«йсма) , блок 10 управления , ре), второй коммутатор 11, блох-12 эталонных сигналов, блок 13 ввода-вывода и пульт 14 оператора.
Блок 1 состоит из п одинаковых формирователей 15 управляющих cjarHaлов. Количество формирователей зависит от количесТв.а использованных в системе стандартных измерительных приборов, входящих в блоки 7 и 8, а также отразрядности регистров в блоках 3 |1 4, разрядности информационной шины управляющей вычислительной машины. Если, например, в качестве УВМ используются микроэвм Электроника НЦ-ОЗД с разрядностью информационной шины, равной 1б бит, то с помощью одного формирователя можно управлять-одним 128-разрядным регистром. Каждый из формирователей 15 состоит из дешифратора 16, элемента ИЛИ 17 и формирователя 18 сигнала подтверждения (ПТР). Структурная схема блока 1 приведена на фиг. 2.
В качестве управляющей вычислительной машины 2 может быть использована любая серийная микроэвм, ,например Электроника НЦ-ОЗД или машина, построенная на выпускаемых отечественной промышленностью микропро;цессорных комплектах БИС (например, -серии К580, К589) .
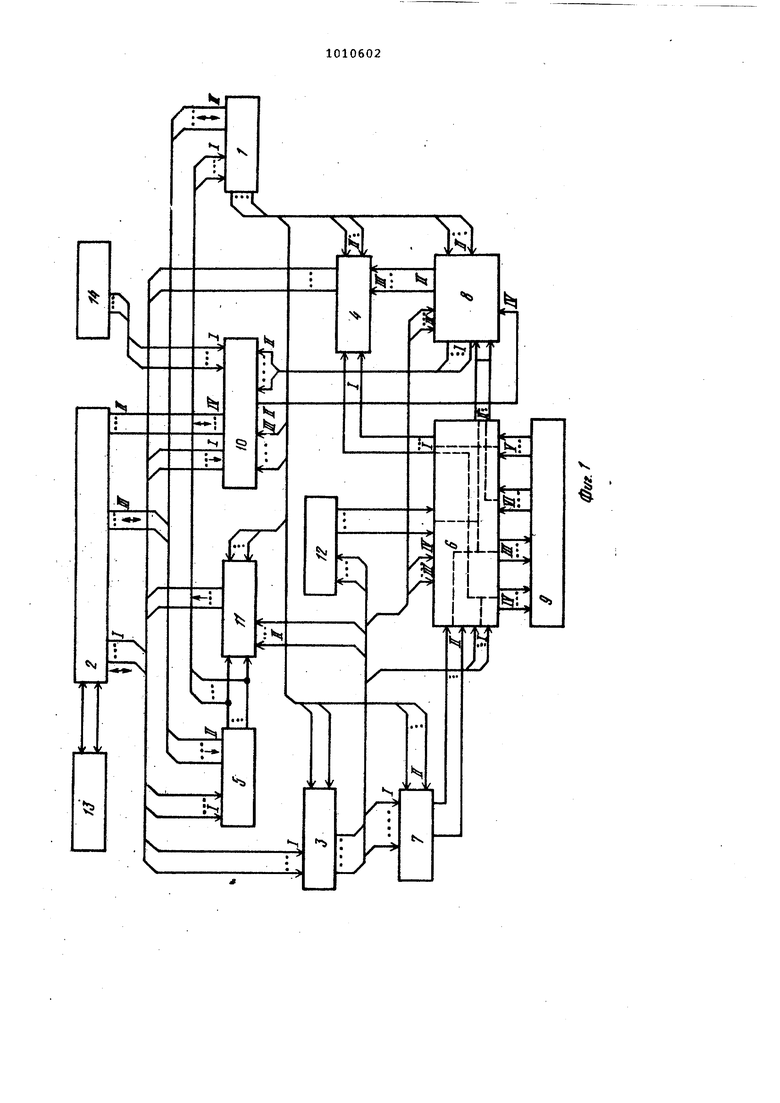
Блок 3 содержит п одинаковых 16 разрядных регистров, каждый из которых состоит из четырех 4-разрядных статических регистров 19,-например 133ТМ5. На выходах регистров 19 включены блоки согласования 20. Тип блока 20 согласования зависит от назначения регистра 19. Если регистр 19
предназначен для выдачи цифровой йнформации на объект контроля, то блок 20 согласования состоит из магистральных усилителей 109ЛИ1. Если регистр 19 предназначен для управления релей)ыми входами приборов, входящих в блоки 7 и В, то блок 20 согласования состоит из ключей 146КТЗ. Структурная схема блока 3 показана на фиг.З.
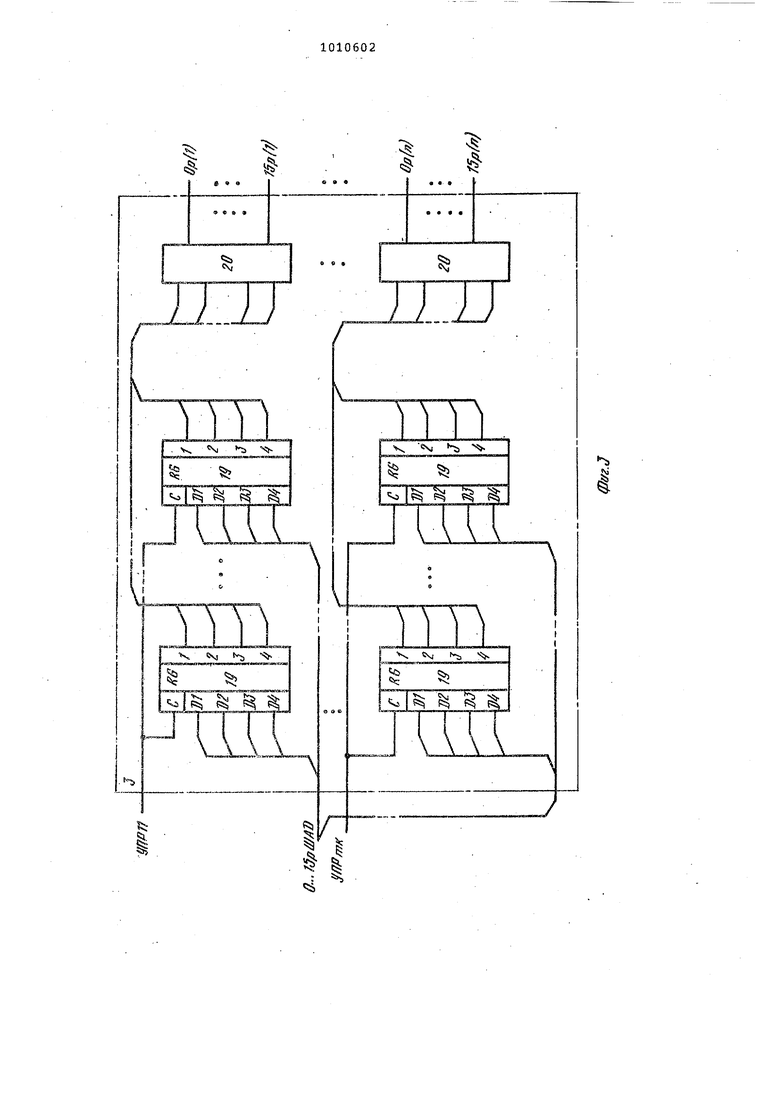
Аналогичную структуру имеет и блок 4. Отличие его от блока 3 заключается в том, что блоки 20 согласования состоят из схем с открытым коллектором 133ЛА8, соответствующие выходы которых объединены в монтажное ИЛИ (нагрузочные резисторы находятся в УВМ). Структурная схема блока 4 показана на иг. 4.
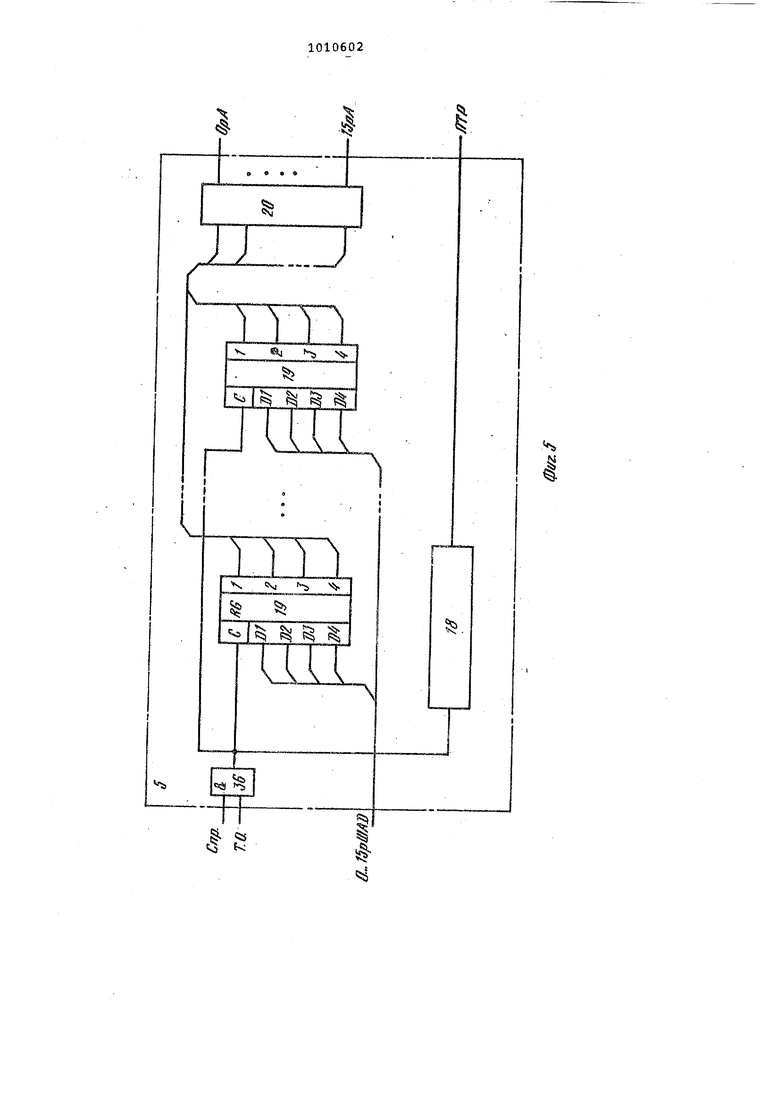
В блоке 5, структурная схема которого показана на фиг. 5, блок 20 согласования построен на схемах 133ЛА6.
Первый коммутатор 6,структурная схема которого показана на фиг. 6, состоит из релейных блоков 21, в состав которых входят реле 22 и 23, реле 24, соединителей 25, реле 26 - 28 объединенных в блоки 29. В блоке использованы реле типа РЭС55.
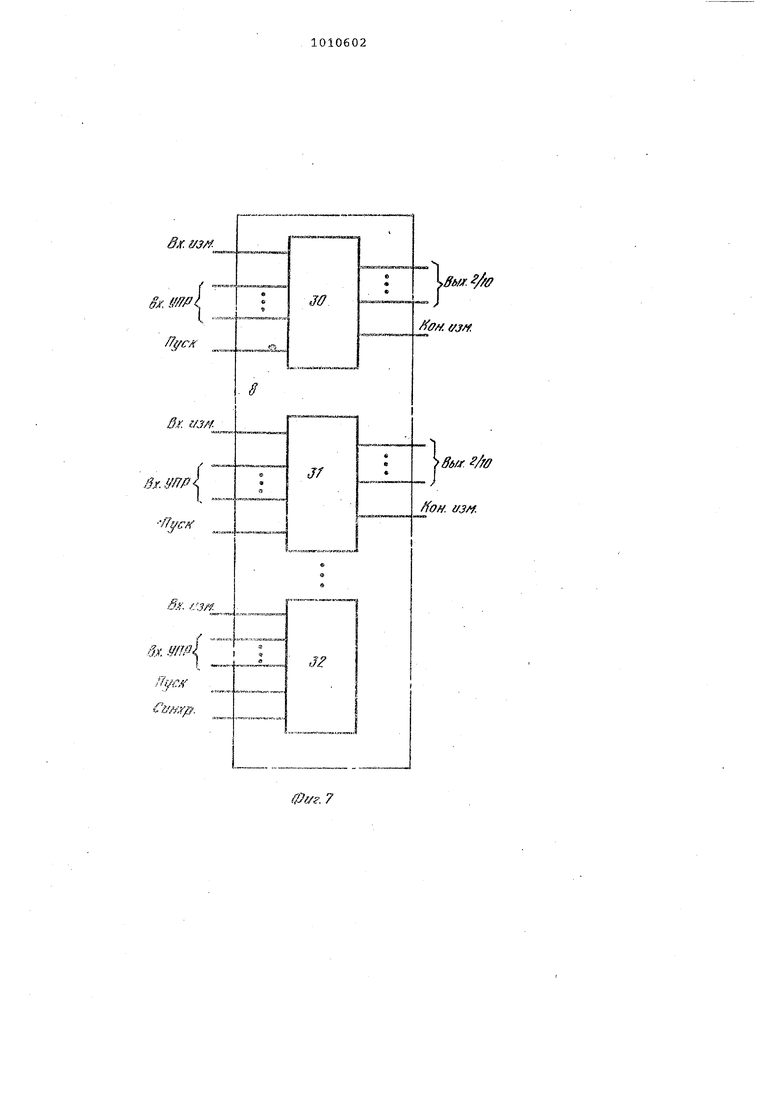
Блоки 7 и 8 cT iyKTypa которых показана на фиг. 7,;,представляют собой набор стандартных измерительных приборов с цифровым дистанционным управлением, например вольтметр 30 (В7-18 с преобразовател ем В9-1), частотомер 31 (43-54), осциллограф 32 (С7-17) и т.д.
Блок 10 состоит из п одинаковых формирователей 33, каждый.из которых состоит из элемента ИЛИ 34, элемента Запрет 35, элемента И 36, формирователя 37 вектора прерывания и элемента ИЛИ 38. Формирователи 33 включены последовательно по схеме дейзицепочки. В состав блока 10 входят
.также двоично-десятичный счетчик 39,
блоки 40 и 41 сравнения и формирователь 42 импульса синхронизации осциллографа. Структурная схема блока 10 доказана на фиг, 8 и 9.
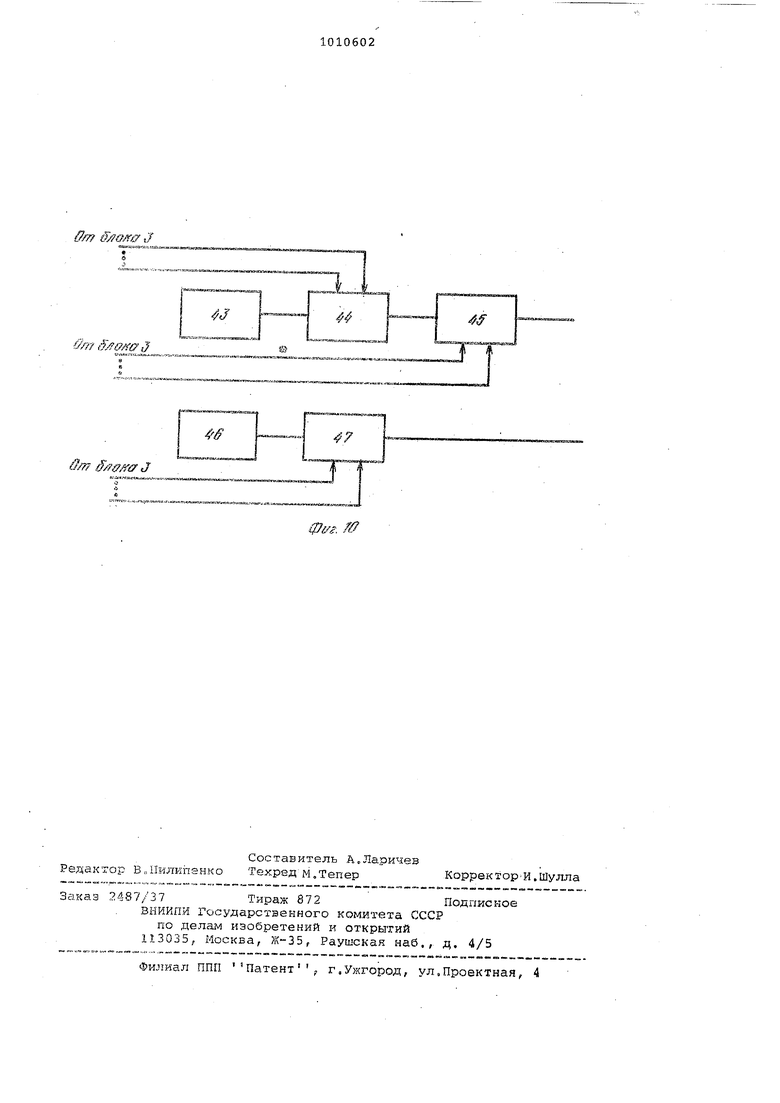
На фиг. 10 показана структурная схема блока эталонных сигналов, состоящего из генератора 43 импульсов с управляемым делителем 44 частоты, управляемого аттенюатора 45, источвика 46 питания с управляемым делителем 47 напряжения.
Формирователь 18 4фиг.. 2) содержит элементы И 48, резистор 49 и кон
денсатор 50.
Назначение и работа блоков, входящих в автоматизированную систему
,контроля, следующие.
Блок 1 предназначен для формирования сигналов управления (упр. 11.. упр.8 п), необходимых для записи информации в блоки 3 и 4 для считывания контрольных кодов с .блоков 3-5 для управления форьМрователями векторов прерываний лока 10, для органи зации прерывания, для запуска прибо ров , входящих Ь блоки 7 и 8. Дешифраторы 16 дешифруют младшие разряды адреса, поступающие из блок 5 и Bbtuaipt управляющие сигналы (упр. 11 ... упр. 8 п) на блоки 3, 4, 7, 8, 10 и на второй коммутатор 11. Етаршие разряды адреса дешифруются в буферном блоке (не показан) и служат для выбора номера формирователя 16. Сигналы сопровождения информации (СПРО и типа обмена (ТО) поступают из УВМ 2. Сигнал СПР свидетельствуе о достоверности вьщаваемой информации, а сигнал ТО определяет, какая информация находится в данный момен на магистрали (адрес или данные). В ответ на сигнал СПР формирователь 18 формирует и выдает в УВМ 2 сигнал ПТР, который оповещает УВМ 2 и том, что соответствующие сигналы управле ния сформированы. Сигнал ПТР задержан относительно сигнала СПР на время, определяемое КС-элементами схемы (0,5 - 1 мкс). На выходе формировате ля 18 включены элементы с открытым коллектором, образующие монтажное ИЛИ . УВМ 2 предназначена для управления работой системы. Блок 3 предназначен для записи и хранения текущих кодов цифровых сигналов, подаваемых на объект контроля а также цифровых кодов, управляющих работой первого коммутатора 6, и бло ков 7, 8, 12. Запись информации в блок 3 осуществляется с адресно-информационной шины УВМ (0...15 р ШАД) через буферные усилители (не показаны) под действием сигналов управления Упр. 11...Упр.. , поступакидих с гЧК блока 1. Блок 4 предназначен для приема и выдачи в УВМ ВЫХОДНЕ1Х цифровых кодов объекта контроля, а также цифровых кодов, соответствующих параметрам объекта контроля, измеренных блоком 8. Управляющие сигналы Упр.31... Упр,5 поступают с соответствующих выходов формирователей блока 1.1. . .м разряды коммутатора поступают с соответствующих выходов первого коммутатора 6 (на фиг. 1с четвертых выходов первого коммутатора), 1..N разряды изм. поступают с соответствующих выходов блока 8 (на фиг. 1с первых выходов, блока 8) . Блок 5 предназначен для хранения адресных кодов, если адресная шина .УВМ 2 совмещена с шиной данных,как, например, и микроэвм Электроника НЦ-ОЗД. Запись информации в регист адреса осуществляется по сигналам СПР и ТО, поступающих от УВМ 2. Формиро ватель 18 входящий в состав бло ка 5, осуществляет задержку сигнала СПР на время 0.5-1 мкс и выдает его обратно в УВМ 2 в виде сигнала ПТР, который информирует УВМ 2 а том, что переданная информация (адрес) принята. , Первый коммутатор 6 предназначен для коммутации входов-выходов объекта контроля к соответствующим выходам блока 3, к соответствующим выходс1М блока 7, к соответствующим входам блоков 4 и 8, а также для коммутации шестых входов коммутатора .на его четвертые выходы и его пятых входов на его третьи вьлходы для осуществления самоконтроля системы. Реле, входящие в состав коммутатора б, управляются от регистра коммутации, который находится в блоке 3. .- С помощью группы petoe 26 осуществляется отделение цифровых входов объекта 9 контроля (ОК) от всех остальных его цепей. Если контакты реле 26 находятся в верхнем положении, то данные цепи ОК являются цифровыми входами и цифровая информация с соответствующего регистра блока 3 поступает на соответствующие контакты ОК. Если контакты реле находятся в нижнем положении, то соответствующие цепи ОК могут быть как аналоговыми входами и выходами, так и цифровыми вы.ходами. Причем, если это цифровые выходы, то контакты группы реле 27 находятся в верхнем положении, а контакты группы реле 28 - в нижнем. При этом информация с цифровых, выходов ОК поступает на соответстЬующий регистр блока 4. Если данные цепи ОК являются аналоговыми входами или выходами, то контакты группы реле 27 находятся в нижнем положении и эти цепи ОК подключены к соединителям 25 и далее к группе реле 23. С помощью групп реле 22 и 23, а также соединителя 25 к любому аналоговому выходу ОК можно подключить любой прибор, входящий в блок 8. Точно также к любому аналоговому входу ОК можно подключить любой прибор, входящий в блок 7. Группа реле 28 предназначена для коммутации информации блока 3 в блок 4 в режиме самоконтроля. С помощью группы реле 25 выходы стимулирующих приборов, входящих в блок 7, подключаются ко входам измерительных приборов, входящих в блок 8 в режиме самоконтроля системы. Блок 7 предназначен для подачи на объект контроля стимулирующих сигнаов, а блок 8 - для измерения выходных сигналов объекта контроля. Измерительные входы (Вх.изм.) с помощью коммутатора 6 подключаются к нужным выходам ОК. По сигналу Пуск, подаваемому с блока 1, при6op измеряет поступивший на его вход сигнал. По окончании измерения он вьщает сигнал (Кон.изм.), необходимый для перехода УВМ 2 к обработке результатов измерений. Результат измерения выдается в двоично-десятичном коде на специальные выходы и через блок 4 поступает в УВМ 2 для обработки. Для синхронизации осциллографа 32 блоком 10 вырабатывается спе циальный сигнал Синхр. , принцип формирования которого показан на фиг. 9. Блок 10 предназначен для перевода работы УВМ 2 на программу обработ ки режима, набранного на пульте 14 для выхода УВМ 2 на программу самоконтроля во время измерения параметров блоком 8, для формирования синхроимпульса синхронизации осциллографа в режиме зацикливания участка про граммы контроля. Рассмотрим работу блока 10. Пример. Пусть от пульта 14 поступил внешний запрос на прерывание ЗПР-1 ВНШ, соответствующий какому-либо режиму работы системы. Этот сигнал, пройдя через все формирователи 33, поступит в УВМ 2 в виде сиг нала ЗПР1. В ответ на этот сигнал УВМ 2 вьщает сигнал РЗР1 (разрешение) , , пройдя через последовательно включенные формирователи 33 дойдет до того формирователя, на который поступил сигнал внешнего запроса. Дальнейшее распространение это го сигнала блокируется сигналом запроса, поступающим с выхода элемента 38 ИЛИ данного формирователя 33 на запрещающий вход элемента 35 запрет Эти сигналы (запрос и разрешение) через элемент 36 И активизируют формирователь 37 векторов прерываний, который при условии, что линия свободна сигнал Занято отсутствует), выдает в УВМ сигнал Прерывание и вектор прерывания. Вектор прерывания представляет собой адрес ячейки памяти в ЗУ УВМ с началом программы, соответствующей режиму, заданному на пульте 14. В. шифраторах всех формирователей 37 жестко зашито по два вектора пре рываний (для организации модификации режимов). Номер вектора выбирается с помощью сигнала управления, поступающего от блока 1. Интерфейсные сигналы, например Занято, подаются по стандартной схеме организации, обмена между УВМ 2 и внешними . устройствами. После приема вектора прерываний УВМ 2 приступает к выполнению программы, соответствующей заданному режиму. Как только будут при ведены все подготовительные операции по сигналу управления от блока 1 оди из измерительных приборов начнет измерение соответствующего параметра ;ОК Время измерения составляет от 10 мс до 1 с, что во много раз превышает время обработки информации в УВМ 2. Поэтому во время измерения УВМ 2 мойет заниматься решением других задач, например управлять самоконтролем системы или подготовкой новых измерений. Для этого сигнал управления запуском измерительного прибора от блока 1 подается также на соответствующий формирователь 33 и формирует запрос на прерывание. По получении разрешения от УВМ 2 формируется вектор прерывания и УВМ 2 переходит к .управлению процессом самоконтроля или подготовкой последующих измерений. Как только измерительный прибор закончит измерение он выдает сигнал об (ончании измерения, который поступает в цепь внешнего .запроса соответствующего формирователя 33. Формирователи, связанные с блоком 8 . измерителей, имеют более высокий приоритет, чем формирователи, связанные с пультом 14. Поэтому по окончании элементарного акта обмена УВМ 2 возвращается к выполнению основной программы, т.е. принимает информацию от измерительного прибора,обрабатывает ее, вьщает в случае необходимости результат, переходит к выполнению следующего набора программы. Для организации режимов Останов на заданном наборе , Зацикливание участка программы , а также для синхронизации осциллографа любым набором программы в режиме Зацикливание в блок 10 входят двоично-десятичный счетчик 39 наборов, блоки 40 и 41 сравнения и формирователь 42 импульса синхронизации, состоящий иэ элементов И 51, резистора 52 и конденсатора 53. , На блок 41 с переключателя пульта 14 подается двоично-десятичный код номера набора, с которого необходимо осуществить возврат к нужному набору программы. Как только текущий номер набора в счетчике 39 совпадает с номером, набранным на пульте оператора 14, блок 41 выдает сигнал запроса, поступающий в линию ЗПР1 формирователя 33 (фиг. 8). Далее осущес.твляется стандартная процедура формирования прерывания и УВМ 2 переходит к обработке режима зацикливания. При этом в счетчик 39 по сигналу управления, подаваемому на вход С2 от блока 1, записывается номер набора, с которого необходимо начать повторение прогргилмы. Далее счетчик 39 осуществляет двоично-десятичный счет по сигналу, подаваемому от блока 1 на вход С1, и считает вновь до того же набора и т.д. При этом, как только текущий номер набора в счетчике 39 совпадает с номером, набранным на пульте 14, блок 40 и формирователь 42 вырабатывают синхроимпульс, которым можно синхронизировать осци лограф 32, входящий в блок 8. Таким образом, на экране осциллографа мож но наблюдать устойчивую картину, вы деляя любое место программы. Аналогично реализуется режим Останов на заданном наборе . Здесь также осуществляется переход к подпрограмме, результатс)М выполнения которой является останов. Блок 12 предназначен для организации самоконтроля системы. Источник 46 питания с управляемым .делителем 47 напряжения предназначе ны для проверки вольтметра 30 посто янного тока, В блок могут входить и другие датчики в зависимости от сос тава блока 8. В процессе эксплуатации системы блок 12 периодически проверяется. Устройство работает следующим об разом. Информация, хранимая в запоминаю щем устройстве .УВМ 2, в соответствии с программой контроля, хранимой тамже, передается на информационные вхо ды блока б, куда записывается по сиг налам управления от УВМ, поступающим на управляющие входы блока 5. Информация с выхода блока 5 посту пает НС. вторые входы блока 1, где Дв шифруется. По управляющим сигналам с выходов блока 1 информация записывается в блок 3, предназначенный для выдачи цифровых сигналов через первый коммутатор 6 на объект 9 контро(Ля, для задания рабочих режимов блоiка 7, для выбора пределов и характера,:измерений блока -8, для управления первым коммутатором б для выбора режима работы блока 12. Цифровые данные с выхода объекта 9 контроля через первый коммутатор б поступают на третьи входы блока. 4 с выходов которого они поступают в УВМ 2 для обработки в соответствии с программой контроля. Блок 7 через первый коммутатор 6 выдает необходимые аналоговые сигналы на аналоговые входы объекта 9 контроля. Ответные сигналы с аналоговых выходов объекта 8 контроля через первый коммутатор 6 поступают на из 1ерительные (третьи) входы блока 8, где измеряются и соответствии с программой контроля. В блоке б результаты измерений преобразуются в цифровую форму и с его первых выходов поступают на вторые входы.блока 4 , с выходов которого передаются в УВМ 2 для обработки. Блок 1 вырабатывает в соответствии с программой управлякяаие сигналы предна.эначенные для синхронной работы всех блоков системы. Блок 10 предназначен для организации следукиаих режимов работы систе мы: 1) автоматическая одноразовая проверка с фиксацией результато)в проверки на выходном устройстве (напри|мер, дисплей или konsul) без осТанова при наличии сбоев в объекте контроля; 2) то же, с осиановом после каждого сбоя; 3) пошаговый режим работы с остановом после каждого элементарного цикла измерений; 4) автоматическая одноразовая проверка с остановом на любом заданном наборе программы контроля; 5) автоматическая многоразовая проверка путем зацикливания любого участка программы контроля; б) режим корректировки программы; 7) режим самоконтроля системы. По сигналам с пульта 14 и блока 1 блок 10 формирует и вьщает на управляющие входы УВМ 2 сигнал запроса на прерывание, и при Получении разрешения от УВМ 2 выдает в нее вектЬр прерывания. Вектор прерывания представляет собой адрес ячейки памяти в УВМ 2 с началом программы, соответствующей заданному режиму, и выдается только той ячейке, в которую поступил запрос от внешнего абонента. Если запросы поступили от нескольких абонентов, то обрабатывается запрос от абонента с более высоким приоритетом. В блоке имеется несколько резервных ячеек формирования векторов прерывания, что позволяет вводить новые режимы работы или новые измерительные приборы. Входящая в состав блока управления режимами схема сравнения с формирователем формирует синхроимпульс , как только текущий номер программы станет равньм номеру, за- . данному оператором с пульта. Вторая схема сравнения формирует сигнал Конечный набор (как только текущий номер набора станет равным номеру, заданному оператором). При зацикливании участка программы по сигналу Конечный набор происходит переход системы на отработку данного режима. В счетчик наборов записьшается новое значение йомеранабора, с которого начнется выполнение программы зацикливания. Таким , образом, программа будет многократно, повторяться от набора, записанного в счетчик наборов по прерыванию, и до конечного набора, заданного на пульте оператора. Второй коммутатор И предназначен для осуществления самоконтроля системы во время выполнения основной программы контроля объекта. Такой режим возможен потому, что время измерения параметров сигналов блоком 8 велико по сравнению с машинным циклом УВМ (превышает не менее, чем в 1000 раз)., Поэтому во время измерения выходного сигнала, блоком 8 УВМ 2 осущэствляет программу контроля отдельных блоков системы и их связей. По сигналу с блока 1 на начало из мерения блок 10 формирует запрос на прерывание и по получении от УВМ 2 разрешения вьадает в УВМ 2 вектор пре ;|рьшания, вызывая тем самым выполнени одной из подпрограмм самоконтроля. УВМ 2 выдает контрольные коды на соответствующие блоки системы-(блоки 5и 3) . С выходов этих блоков контрольные коды поступают на соответствующие входы второго коммутатора 11, с выхода которого вьщаются в определенной последовательности в УВМ 2 для обработки. Если УВМ 2 зафиксирует несоответствие какого-либо кода, принятого с выхода коммутатора 11 с эталонным, хранящимся в памяти УВМ 2,происходит останов работы системы и на устройствоотображения выводится информация об отказавшем бло ке. После окончания измерения блок 8 выдает специальный сигнал, поступающий на вторые входы блока 10. По это му сигналу блок 10 формирует необходимые сигналы для возврата УВМ к выполнению основной программы. Блок 12 эталонных сигналов предназначен дЛя полной проверки работоспособности системы в режиме самокон троля. Он выдает ряд эталонных постоянных, переменных и импульснь х напряжений, которые в соответствии с программой через -первый коммутатор 6поступают на соответствующие измерительные входы блока 8. Измеренные параметры эталонных сигналов через блок 4. передаются в УВМ 2, где сравнивают с эталонным значением этих па раметров . Для проверки работоспособности блока 7 его выходы через коммутатор 6 связаны с измерительными входами блока 8. Процесс контроля аналогичен описанному выше. Для осуществления полного контроля коммутатора б необходимо перемкнуть перемычками соответствующие входы и выходы коммутатора (2-е выходы с третьими входами и вторые выходы с четвертыми входами). Таким образом,- контролем охватывается вся аппаратная часть системы, что значительно повышает достоверность приводимых ею измерений. Контроль nporpaMNOJ осуществляется с помощью УВМ 2 путем проверки контрольной суммы данных. Такой контроль входит в состав математического обеспечен любой УВМ и пояснения не требует.I Устройство ввода-вывода предназначено для ввода прогрг вал в память . . УВМ, а также для вывода результатов контроля на терминальные устройства озгобрахсения. Использование изобретения позволит значительно расширить функциональные возможности системы. Например, применение режима зацикливания программы позволяет наблюдать процессы в объекте контроля в динамике с юмощью осциллографа, что позволит 1спользовать предлагаемую Систему не только для контроля, но и для настройки РЭА. Введение режима корректировки значительно упрощает процесс отладки программ контроля. Система позволяет управлять одновременно большим количеством измерительных и стимулирующих приборов, что значительно сокращает время измерений и повышает производительность ее и эффективность использования. Охват систё мы полным самоконтролем повышает достоверность результатов контроля.
с I
«I
i
-5
I
I
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ ЭЛЕКТРОННЫХ СХЕМ | 1991 |
|
RU2106677C1 |
| Автоматизированная система контроля параметров электронных схем | 1987 |
|
SU1500996A1 |
| Устройство для контроля параметров | 1988 |
|
SU1513418A1 |
| Автоматизированная система контроля радиоэлектронных устройств | 1989 |
|
SU1683038A1 |
| Устройство контроля параметров | 1990 |
|
SU1800447A1 |
| Устройство для контроля интегральных схем | 1980 |
|
SU966699A1 |
| Устройство для контроля электронных изделий | 1978 |
|
SU951323A1 |
| Система контроля источников питания | 1985 |
|
SU1262455A1 |
| Автоматизированная система контроля | 1989 |
|
SU1695269A1 |
| Устройство для обмена информацией управляющей вычислительной машины с объектами управления | 1982 |
|
SU1030792A1 |



АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ ЭЛЕКТРОННЫ СХЕМ, содержащая пульт оператора, управляющую вычислительную машину, первые выходы которой соединены с первыми входами блока регистров адреса, с первы-, ми входами блока регистров входной информации, первые входы - с выходами блока регистров выходной информации, вторые входы и выходы управляющей вычислительной машины связаны с . вторыми выходами и входами блока регистров адреса и с первьми выходами и входами, блока синхронизации, вторые выходы которого подключены ко вторым входам блока регистров входной информации, к первым входам блока стимулирующих сигналов, блока измерителей и блока регистров выходной информации, вторые входы которого соединены с первыми выходами блока измерителей, вторыми входами связанного с выходами блока регистров входной информации, с первыми входами первого коммутатора и вторыми входа МИ блока стимулирующих сигналов, выхоДы которого соединены с вторыми вхо. дами первого коммутатора, первые вы ходы которого подключены к цифровьзм .выходам системы, вторые выходы - к аналоговым выходам системы, третьи входы - к цифровым входам системы, четвертые входы - к аналоговым входам системы, а третьи выходы соединены с третьими входами блока измерителей, отличающаяся тем, что, с целью повышения достоверности контроля и расширения функц ональных возможностей системы/ в нее введены блок управления режимами, второй коммутатор, блок эталонных сигналов выходы которого соединены с пятыми входами первого коммутато- ра, подключенного шестыми входами к выходам блока регистров входной информации,ко входам блока эталонньпс g сигналов и к первым входам второго (Л коммутатора, вьисоды которого соединены с первыми входами управляющей вычислительной машины, вторые входы - с выходами блока регистров адре са и с вторыми входами блока синхро- 5 . низации, выходы которого подключены к третьим входам второго коммутатора .м к первым входам блока управления режимами, вторыевходы которого подключены ко вторым выходам блока измерителей, четвертым входом соединенно-л го с первым выходом блока управления режимами, третьи входы котЬрого подф ключены к выходам пульта оператора, четвертые входы и вторые выходы - к о третьим выходам и входам управляющей IN:) вычислительной машины, третьи выходык первым входам управляющей вычислительной машины, а третьи входы блока регистров выходной информации подклюЧены к четвертым выходам первого коммутатора .
IT
|S
ч5. isT 1 I
5:5
ф1/г. /
/TycA
в/. yj//
в/.тр
8x, f:3/.
uif//№.
ffl/f ftf.f/.rp.
фг/г. 7
Резерв
От ff/Tff/fff
От if та 8
ffm ff/7o/rfy I
//J
44
ffm ffAG/{ff J
ff/f7 ff/7ff/fff J
ФШ. fff
4ff
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для программного контроля | 1975 |
|
SU559239A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
