Изобретение относится к устройствам автоматики и может быть использовано в механизмах дискретного перемещения. Известен пневмогидравлическйй еледящий привод с цифровым управлением, содержащий пнсвмоцилиндр с последова установленными поршнями и выходным штоком, дросселирующий расп ределитель, выполненный в виде четырехкромочного золотника, установленного в гильзе, имеющей сливные и напорные окна, исполнительный механизм и элемент обратной связи, кине матически связанный с исполнительным механизмом, золотником распределителя и выходным штоком пневмоцилиндра 1. Однако у этого следящего привода недостаточно высокая точность позиционирования, зависящая от точности позиционирования пневмоцилиндра. Вре мя затухания переходного процесса также велико. Цель изобретения - повышение точности позиционирования и сокращение времени переходного процесса. доставленная цель достигается тем что пневмогидравлическйй следящий привод с цифровым управлением, содер жащий пневмоцилиндр с последовательн установленными поршнями и выходным штоком, дросселирующий распределител выполненный в виде четырехкромочного зЬлотника, установленного в гильзе, имеющей сливные и напорные окна, исполнительный механизм и элемент обратной связи, кинематически связанны с исполнительным механизмом, золотником распределителя и выходным штоком пневмоцилиндра, снабжен фиксатором, выполненным в виде установленны на кронштейне с возможностью поворо та и взаимодействия с элементом обратной связи подпружиненных упоров, золотник выполнен с отрицательным п1ерекрытием напорного окна и с положительным перекрытием сливных окон. На фи-. 1 изображена принципиальная схема следящего привода; на фиг. фиксатор элемента обратной связи (ви А на фиг. 1).
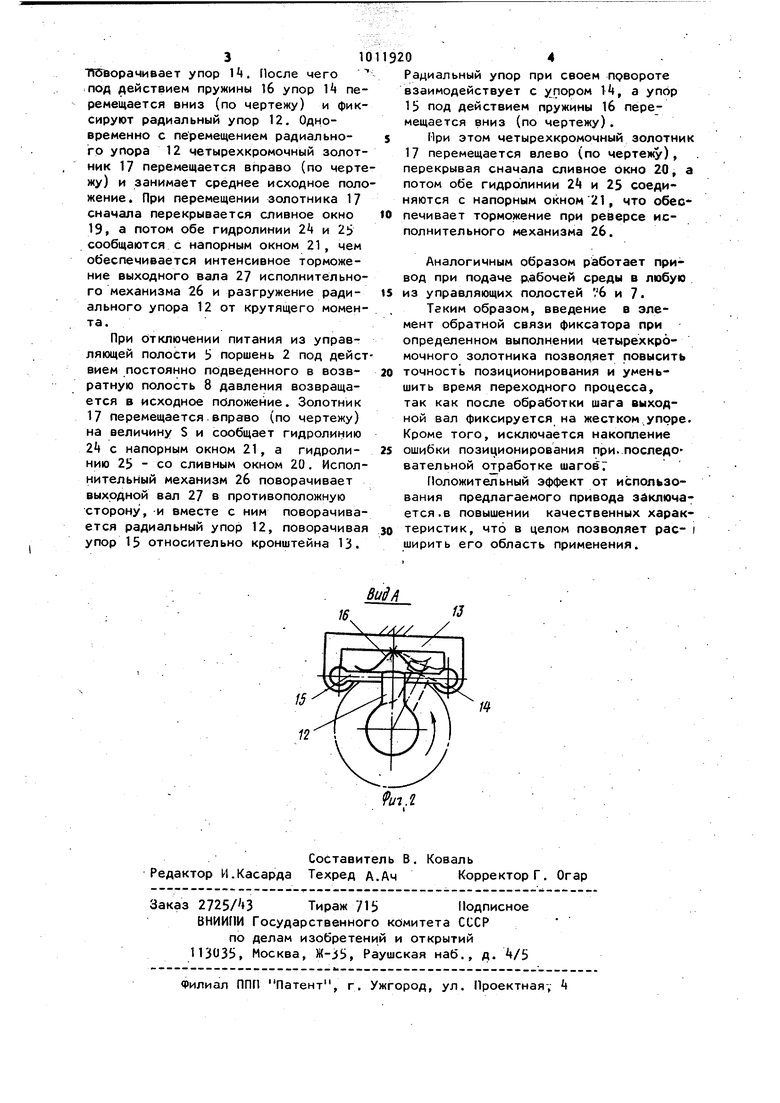
Пневмогидравлическйй следящий при-Исполнительный механизм 26 соверщавод с цифровым управлением содержитет работу до тех пор, пока радиальпневмоцилиндр 1 с последовательно ус-ный упор 12 не войдет в взаимодейсттановленными поршнями 2-4 с образова- вие с упором 15. При этом винт 11
нием управляющих полостей 5-7 ис радиальным упором 12 смещается
возвратной полости 8. Ход поршней 2-вправо (по чертежу).на величину S.
4 соответственно равен S, 2S и 4S.Вращаясь, радиальный упор 12 (фиг.2), 101 19202 С поршнем k жестко связан выходной шток 9f взаимодействующий с элементом обратной связи, выполненным в виде гайки 10, винта 11 с радиальным.упором 12 и снабженным фиксатором, включающим кронштейн 13 упоров 1 и lij, взаимодействующих с пружиной 16, причем ширина упоров Т и 15 S,S . Кроме того, следящий привод включает дросселирующий распределитель, выполненный в виде четырехкромочного золотника 17, установленного в гильзе 18, имеющей сливные окна 19 и 20 и напорное окно 21, сообщенные соответственно со сливной линией 22 и напорной линией 23. Золотник 17 выполнен с отрицательным перекрытием напорного окна 21 и с положительным перекрытием сливных окон 19 и 20. Дросселирующий распределитель связан гидролиниями 2 и 25 с исполнительным механизмом 2б, содержащим выходной вал 27. Исполнительный механизм 2б связан с винтом 11 посредством шлицевого соединения 23. / Пневмогидравлическйй следящий привод работает следующим образом. В .исходном положении рабочая среда подается в возвратную полость 8 пневмоцилиндра 1, при этом поршни 2-Ц занимают правое (по чертежу) крайнее положение. Четырехкромочный золотник 17, взаимодействуя с радиальным упором 12, занимает среднее положение. При этом рабочая жидкость подается в обе гидролинии 24 и 25 и, соответственно, в исполнительный механизм 26, выходной вал 27 которого неподвижен. Радиальный упор 12 - в зафиксированном положении между упорами 14 и 15. При подаче давления питания, например, в управляющую полость 5 пневмоцилиндра 1 поршень 2 и вместе с ним выходной шток 9, радиальный упор 12 и четырехкромочный золотник Г/ переместятся на величину S. При этом гидролиния 25 сообщается с напорной линией 23,. а гидролиния 24 - со сливным окном 19 и сливной линией 22.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ СО СТРУЙНЫМ УСИЛИТЕЛЕМ В ПЕРВОМ КАСКАДЕ | 2015 |
|
RU2594094C1 |
| Гидравлический дроссельный привод | 1990 |
|
SU1742500A1 |
| СИСТЕМА СОВМЕЩЕННОГО УПРАВЛЕНИЯ ПРИВОДАМИ ПО ДВУМ НЕЗАВИСИМЫМ КООРДИНАТАМ | 1992 |
|
RU2033344C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ГИДРОЦИЛИНДРОВ | 1996 |
|
RU2105907C1 |
| Устройство для перемещения и установки рабочего органа машины в заданном положении | 1973 |
|
SU506316A3 |
| Пневмогидравлический следящийпРиВОд | 1978 |
|
SU802657A1 |
| ДВУХКАНАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 2013 |
|
RU2553588C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Система управления рулевыми органами летательного аппарата | 1990 |
|
SU1744001A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
ПКЁВМОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД с ЦИФРОВЫМ УПРАВЛЕНИЕМ, содержащий пневмоцилиНДР с последова тельно установленными поршнями и выходным штоком, дросселирующий распре делитель, выполненный в виде четырехкромочного золотника, установленного в гильзе, имеющей с пивные и напорные окна, исполнительный механизм и элемент обратной связи, кинематически связанный с исполнительным механизмом, золотником распределителя и выходным штоком пневмоцилиндра отличающийся тем,что, с целью повышения точности позиционирования и сокращения времени переходного процесса, элемент обратной связи снабжен фиксатором,выполненным в де установленных на кронштейне с возможностью поворота и взаимодействия с элементом обратной связи подпружиненных упоров, а золотник выполнен « с отрицательным перекрытием напорного окна и с Положительным перекрытием сливных окон.
