(54) ПНЕВМОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический следящий привод | 1976 |
|
SU603776A1 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1562542A1 |
| Следящий привод | 1976 |
|
SU636423A1 |
| Пневмогидравлический следящий привод | 1982 |
|
SU1025924A1 |
| Пневмогидравлический следящий привод | 1989 |
|
SU1682640A1 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1572990A1 |
| Устройство для перемещения и установки рабочего органа машины в заданном положении | 1973 |
|
SU506316A3 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Система синхронизации скорости поршней силовых цилиндров | 1979 |
|
SU770741A1 |
| Активная подвеска корпуса транспортного средства | 1973 |
|
SU598780A1 |
изобретение.относится к областигидропневмоавтоматики и может быть использовано в следящих и программно-копировальных системах.
Известен пневмогидравлический следящий привод, содержащий пневмогидравлический преобразователь, полости пневмоцилиндра которого соединены с пневматическим управляющим устройством, а полости гидроцилиндра - с гидрогазовым аккумулятор полостями компенсирующего устройства обратной связи по нагрузке и с полостями исполнительного гидроцилиндра, связанного жесткой обратной связью по положению с управляющим устройством l .
Недостатками известного привода являются невысокие точность и динамические свойства вследствие того, что компенсация возмущения от нагруки функционально связана с отслеживанием заданной.
Целью изобретения является повышейие точности и улучшение динамических свойств.
Указанная цель достигается тем, что пневматическое управляющее устройство выполнено в виде плоского следящего золотника, имеющего
эадаиощую и корректирующую пласти ны, расположенные в корпусе и поджатые усредняющими рычажно-пружинными элементами, при этом компенсирующее устройство обратной связи по нагрузке корпусом жестко связано с задающей пластиной и имеет подвижный элемент, взаимодействующий с корректирующей пластиной.
0
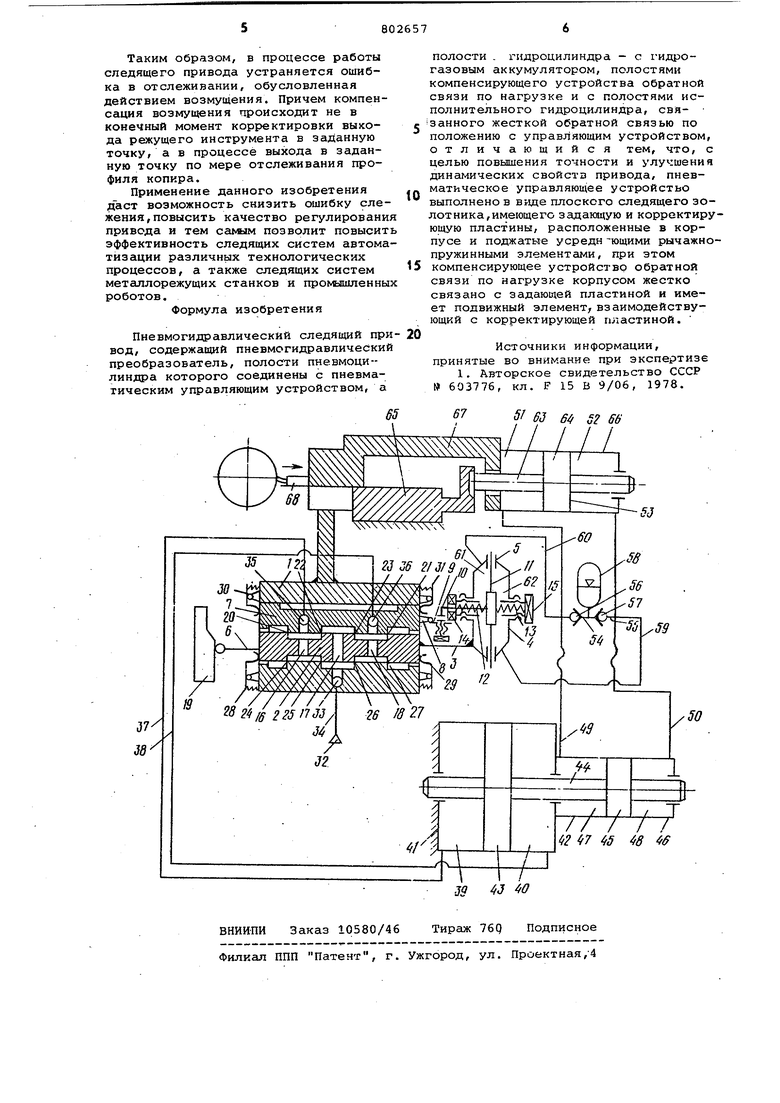
На чертеже изображен пне могидравлический следящий привод.
Следящий привод содержит пневматическое управляющее устройство,
5 выполненное в виде плоского следящего золотника, состоящего из корпуса 1, задающей пластины.2, жестко связанной кронштейном 3 с корпусом
4компенсиру1бщего устройства 5 об0ратной связи по нагрузке и со щупом 6, и корректирующей пластины 7, соединенной с помощью шарнира 8, рычага 9 и тяги 10 с подвижным элементсм 11 компенсирующего устройства
5
5обратной связи по нагрузке. Тяга -10 зафиксирована на рычаге 9. Подвижный элемент 11 поджат пружинами 12 и 13 с помощью регулировочных винтов 14 и 15. В задающей пласти0не 2 выполнены сквозные каналы 16, 17 и 18. Шуп 6 находится в контакте с профильной поверхностью копира 19 На поверхности корпуса 1 и повер ностях задающей и корректирующей пластин выполнены прямоугольные про точки, взаимное положение которых .образует дросселирующие щели 20, , 21, 22, 23, 24, 25, 26 и 27. Причем дросселирующие щели 20 и 21 выполне ны с отрицательным перекрытием, а дросселирующие щели 22,23,24,25,26 и 27 могут быть выполнены как с нул вым, так и с положительным или отри цательным перекрытием в зависимости от функционального назначения пнев тического управляющего устройства. Пластины 2 и 7 поджаты усредняющими рычажно-пружинными элементами 28, 29,30,31. Подвод воздуха от источника пита ния 32 к входному каналу 33, выполненному в корпусе 1, осуществляется по магистрали 34. Выходные каналы 35 и 36 выполнены в корректирующей пластине 7. Данные каналы соединены магистралями 37 и 38 соответственно с полостями 39 и 40 пневмоцилиндра 41 пневмогидравлического преобразователя -давления 42. Поршень 43 пнев моцилиндра 41 связан общим штоком 44 с поршнем 45 гидроцилиндра 46. Йолости 47 и 48 гиДроцилиндра 46 со единены магистралями 49, 50 с полос ми 51 и 52 исполнительного гидроцил дра 53, магистралями 54 и 55 через обратные клапаны 56 и 57 соединены с гидрогазовым аккумулятором 58 и мЬ гистралями 59 и 60 - с полостями 61 и 62 компенсирующего устройства 5. Шток 63 исполнительного гидроцили дра 53, связанный с поршнем 64, соед нен с неподвижной станиной 65, а гильза 66 кинематически соединена с копировальным суппортом 67 и режущим инструментом 68-. Корпус 1 плоского следящего золотника закреплен на копировальном суппорте 67, благодаря чему осуществляется жесткая обратная связь по положению с управляющим устройством Пневмогидравлическйй следящий привод работает следующим образом. Сжатый воздух от источника питания 32 подается по магистрали 34 к входным каналам 35, 36 плоского следящего золотника. Если при задающем продольном движении суппорта 67 отсутствует поперечное перемещение.щупа 6,то площади дроСселируюидих щелей 23, 22, 24,25, 26,27 равны между собой, задающая пластина 2 находится в положении динамического равновесия. Если шуп 6 начнет перемещаться относительно копира 19, например, влево, то задающая пластина 2 вместе с компенсирующим устройством 5 и корректирующей пластиной 7 переместится влево. При этом часть воздуха через дросселирующую щель 26 будет поступать в полость 40 пневмоцилиндра 41, а часть воздуха- в атмосферу через дросселирующую щель 21. Полость 39 пневмоцилиндра 41 сообщается с атмосферой через дросселирующую щель 24. Под давлением воздуха поршень 43 . пневмоцилиндра 41 пневмогидравлического преобразователя давления 42 переместится влево, вместе с ним переместится и поршень 45 гидроцилиндра 46, а так как полости 47 и 48 гидроцилиндра 46 соединены магистралями 49 и 50 с полостями 51 и 52 исполнительного гидроцилиндра 53, то при перемещении поршня 45 за счет перетечки жидкости между соединенными полостями гильза 66 исполнительного гидроцилиндра 53 переместится влево. Вместе с гильзой 66 влево переместится суппорт 67 с режущим инструментом 68, а также корпус 1 плоского следящего золотника относительно задающей пластины 2 и корректирующей пластины 7. Площади дросселирующих щелей 22, 23, 24, 25, 26 и 27 сравняются, и в системе восстановится равновес сил. Таким образом, в системе осуществляется отработка управляющего воздействия. Если режущий инструмент 68 и копировальный суппорт 67 воспринимают возмущение, например изменение силы сопротивления резанию, то изменяется перепад давления на поршнях 64, 45 исполнительного гидроцилиндра 53 и гидроцилиндра 46 пневмогидравлического преобразователя давления 42. Если возмущение действует,например, вправо, то повышается давление в полости 47 гидроцилиндра 46.А так как полости 47 и 48 связаны магистралями с полостями 61 и 62компенсирующего устройства 5, то повышается давление и в полости 61 по сравнению с величиной давления в полости 62. Подвижный элемент 11 перемещается вправо, а вместе с ним вправо перемещается и корректирующая пластина 7. Это приводит к тому, что входной канал 33 через канал 17 и дросселирующую щель 23 сообщается с полостью 40 пневмоцилиндра, а через дросселирующую щель 21 - с атмосферой. По мере перекрытия дросселирующей щели 21 количество воздуха, поступающего через магистраль 38 в полость 40 возрастает. Это приводит к перемещению поршней 43 и 45 влево и, в конечном счете, влево переместится гильза 66, суппорт 67, т.е. перемещение будет происходить в сторону, противоположную приложенному возмущающему воздействию,-тем самым это возмущение будет скомпен сировано.
